國產多波束側掃聲吶系統水上測試及性能分析
2022-05-12 01:36:40汪連賀
港工技術 2022年2期
徐 樂,汪連賀
(天津海事測繪中心,天津 300222)
引言
側掃聲吶是一種快速探測和了解水下目標、獲取海底地貌特征的水聲設備。廣泛應用于海洋勘測、海圖測繪、失事沉船探測等領域[1]。近年來,新型的側掃聲吶設備不斷推陳出新,從其工作原理來講,側掃聲吶可分為:單波束單頻側掃聲吶、單波束雙頻側掃聲吶、單波束三頻側掃聲吶、多波束側掃聲吶等。其中單波束雙頻側掃聲吶應用較為廣泛,技術更加成熟;而多波束側掃聲吶異軍突起,發展迅速。
傳統的單波束側掃聲吶屬于主動型聲吶,主要通過向海底發射一條垂直于拖曳方向的窄條狀波束,獲取反向散射信息反映海底的基本情況,當側掃聲吶沿拖曳方向運動時,換能器周期性地發射和接收聲脈沖以得到波束照射的一窄條海底區域回波,再由信號處理器把不同發射周期的回波沿拖曳方向拼接起來就形成了海底地貌圖像。基于上述原理,當發射單頻信號時,垂直于航向的距離分辨力取決于發射脈沖寬度,而沿拖曳航跡方向的分辨力取決于方位向波束寬度和拖曳速度。當拖曳速度過大時,在一個發射周期內,聲吶拖魚沿拖曳方向行程過大,會出現相鄰發射波束沿方位向空間掃描間隔過大的現象,造成成像分辨率下降[2]。代表性的單波束雙頻側掃聲吶設備包括EdgeTech 4200MP側掃聲吶、Klein4000 側掃聲吶等。
與單波束側掃聲吶相比,多波束側掃聲吶在技術設計層面更加先進,其在垂直拖拽方向發射多個平行的高頻波束,能夠獲取多個波道的信息,結合動態波束聚焦技術,可以同時觀察追蹤不同方向的多個目標,且不易失去接觸,極大的提高了中、近距離沿航跡方向的分辨率,實現了高速掃測。就工作效率和成像質量而言,性能上限遠優于傳統的單波束側掃聲吶。代表性的設備包括Klein5000 V2 型和Shark-S455M 型多波束側掃聲吶。
本中心于 2021 年引進新型國產設備:Shark-S455M 型多波束側掃聲吶。該型設備具有低速和高速兩種使用模式,可根據需要實時在線選擇。低速模式為單波束雙頻側掃,高速模式為高頻多波束側掃(雙側10 個波束)。該設備采用動態數字自動聚焦技術,極大提升了影像數據的分辨率,同時 Chirp 調頻信號和CW 連續脈沖信號可實時在線切換,作業模式比較靈活。其系統包含強耐壓不銹鋼拖魚、高強度凱夫拉電纜、防水甲板單元和自主OTech 聲吶軟件。既可以采用交流供電,也可用蓄電池逆變供電。采用內置姿態傳感器能檢測拖魚橫搖、縱搖、波位信息,內置壓力傳感器實時測量拖魚入水深度,內置超聲波測深儀實時測量拖魚到水底高度信息。為科學評價Shark-S455M 型多波束側掃聲吶實際性能,積累設備使用經驗指導實際生產,我中心組織進行了相關驗收測試,通過對海底沉船進行掃測,進而初步評價改型設備的優劣性。
1 測試方案設計
1.1 測試區域
測試區域選擇在天津臨港航道北側某海域,該區域交通便利,海況良好,利于海上測試進行。選擇該區域內一處沉船作為目標物進行聲吶目標發現能力測試。該處沉船已在本中心歷次掃海測量中獲得了豐富的數據影像資料,可用于掃測成果比對。

圖1 3DSS-iDX-450 型三維側掃聲吶沉船掃測影像

圖2 EdgeTech4200MP 側掃聲吶系統沉船掃測影像
1.2 測線布設
根據沉船位置,順航道方向布設計劃測線,每條測線在保持采集參數不變的情況下至少往返測量兩次[3]。聲吶高速模式下測線距離沉船分別為 30 m、45 m、60 m、90 m 四組,對應聲吶量程分別設置為60 m、90 m、120 m、180 m,確保將目標沉船置于量程中間位置;聲吶低速模式下測線距離沉船分別為30 m、45 m、75 m、90 m,150 m 對應聲吶量程分別設置為60 m、90 m、150 m、180 m,300 m,同樣確保將目標沉船置于量程中間位置。
2 聲吶高速模式測試驗收結果
Shark-S455M 型多波束側掃聲吶高速模式為高頻多波束側掃,工作頻率450 kHz,測試船速10 節。
2.1 60 m 量程
測線距離沉船30 m,右舷通過測得影像如圖4:沉船輪廓清晰,細部特征明顯,船體無明顯變形,海底地形回波清晰,數據影像效果極佳。
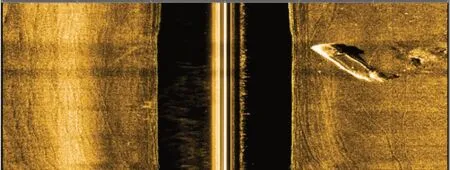
圖4 量程60 m,沉船位于右舷
2.2 90 m 量程
測線距離沉船45 m,左舷通過測得影像如圖5:沉船輪廓清晰,船艏船尾可區分,船體無明顯變形,數據影像效果較好。

圖5 聲吶高速模式,量程90 m,沉船位于左舷
2.3 120 m 量程
聲吶高速模式下選用120 m 量程,測線距離沉船60 m,右舷通過測得影像如圖6:沉船輪廓清晰,船艏船尾細節清晰,船體無明顯變形,數據影像效果極好。

圖6 聲吶高速模式,量程120 m,沉船位于右舷
2.4 180 m 量程
測線距離沉船90 m,左舷通過測得影像如圖7:沉船可判讀,但細部特征無法辨別,數據影像效果一般。
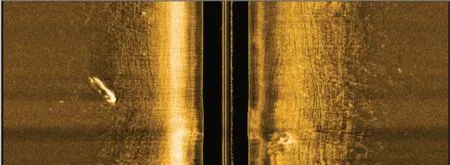
圖7 聲吶高速模式,量程150 m,沉船位于右舷
3 聲吶低速模式測試驗收結果
Shark-S455M 型多波束側掃聲吶低速模式為單波束雙頻側掃,工作頻率為100 kHz/ 450kHz 同步工作,測試船速6 節。
3.1 60 m 量程
測線距離沉船30 m,分左右舷兩次通過測得影像如圖8:沉船輪廓清晰,船艏船尾細部特征明顯,易于發現,但船體均發生了一定幾何變形。

圖8 量程60 m 測得影像
3.2 90 m 量程
測線距離沉船45 m,分左右舷兩次通過測得影像如圖9:沉船輪廓清晰,船艏船尾細部特征明顯,易于發現,但船體同樣發生了幾何變形。

圖9 量程90 m 測得影像
3.3 150 m 量程
測線距離沉船75 m,分左右舷兩次通過測得影像如圖10:沉船輪廓清晰,船艏船尾細部特征明顯,易于發現,但船體均發生了一定幾何變形。
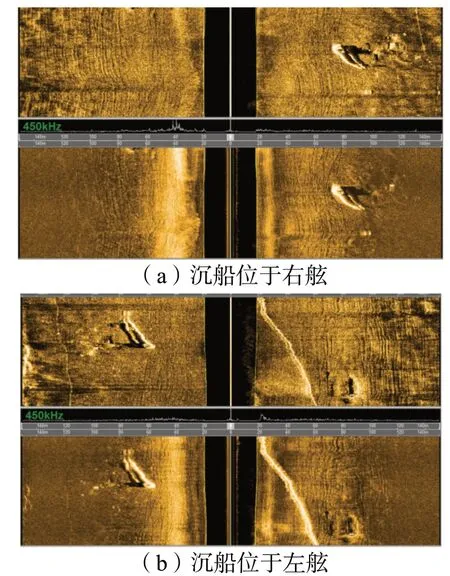
圖10 量程150 m 測得影像
3.4 180 m 量程
測線距離沉船90 m,分左右舷兩次通過測得影像如圖11:沉船輪廓、船艏船尾細部特征可辨,易于發現,船體幾何變形不再明顯,但左船舷通過時在沉船附近出現V 形異常信號。
3.5 300 m 量程
測線距離沉船150 m,右舷通過測得影像如圖12:沉船輪廓不再清晰,船體難于辨認,且在沉船附近再次出現V 形異常信號。

圖12 量程300 m 測得影像,沉船位于左舷
4 結語
本次測試采用不同設備參數對Shark-S455M 型多波束側掃聲吶系統進行了驗收測試。測試結果表明Shark-S455M 型多波束側掃聲吶系統高速模式下數據質量清晰、穩定、可靠。低速模式下障礙物影像普遍發生一定程度幾何變形,但不影像目標物的發現和判讀。低速模式下當其掃寬大于等于180 m后影像中兩次出現V 型異常信號,經分析可能是作業現場的燈浮標引起的信號反射異常亦可能受到海底地形、波束指向性、噪聲等多方面因素的影響,尚須進一步研究測試。
在后續的工作中建議推廣使用聲吶高速模式。亦可在大范圍掃海作業、應急掃測時先使用聲吶低速模式,待發現目標物或可疑信號后再采用聲吶高速模式進行復掃。同時,對目標物變形、異常信號等情況保持關注和警惕,不斷積累數據,提高設備操作、數據判讀水平。
