基于PPK 技術(shù)的高精度內(nèi)陸水庫(kù)水位測(cè)量
2022-05-12 01:36:40劉東全劉曉金
港工技術(shù) 2022年2期
關(guān)鍵詞:測(cè)量
張 媛,劉東全,劉曉金
(交通運(yùn)輸部北海航海保障中心天津海事測(cè)繪中心,天津 300222)
引言
隨著國(guó)家經(jīng)濟(jì)高速發(fā)展和“西部大開發(fā)戰(zhàn)略”的實(shí)施,為內(nèi)陸水庫(kù)采集高精度的水下地形地貌數(shù)據(jù),可保障庫(kù)區(qū)船舶安全航行,促進(jìn)當(dāng)?shù)睾竭\(yùn)事業(yè)及地方經(jīng)濟(jì)高速發(fā)展。在內(nèi)陸水庫(kù)測(cè)量中,水位的精確控制尤為重要。傳統(tǒng)的水位控制方式無(wú)法滿足復(fù)雜情況下水庫(kù)測(cè)量的需求,有一定的誤差,采用GPS PPK 技術(shù)能夠精確地進(jìn)行水位控制,提高三維水深測(cè)量的精度。
1 測(cè)量實(shí)施
1.1 測(cè)區(qū)概況
本文待測(cè)水庫(kù)呈西南一東北走向,庫(kù)區(qū)岸線長(zhǎng)約55 km,水面最寬處約6 km。在項(xiàng)目實(shí)施過(guò)程中,采用GNSS PPK 技術(shù)進(jìn)行高精度的三維水深測(cè)量,有效地解決了測(cè)量區(qū)域河道彎曲、水面坡降變化大帶來(lái)的傳統(tǒng)水位測(cè)量方法無(wú)法準(zhǔn)確控制水位的難題,避免了由于水位觀測(cè)帶來(lái)的水位改正誤差,有效減少了水位站的設(shè)立,節(jié)約了大量人力物力,簡(jiǎn)化了數(shù)據(jù)后處理程序,提高了水深測(cè)量的工作效率,并得到了實(shí)踐的檢驗(yàn)。
1.2 平面與高程控制
平面控制采用 2000 國(guó)家大地坐標(biāo)系(CGCS2000),高斯-克呂格3°帶投影,中央經(jīng)線為102°E。
陸域高程控制采用1985 國(guó)家高程基準(zhǔn)。高程控制測(cè)量采用GPS C 級(jí)網(wǎng)觀測(cè)的方式、聯(lián)測(cè)甘肅CORS,并結(jié)合甘肅省似大地水準(zhǔn)面精化成果獲取其1985 國(guó)家高程基準(zhǔn)高程。
由于歷史水位資料匱乏,只能通過(guò)測(cè)量期間同步觀測(cè)水位,掌握測(cè)區(qū)的水位變化規(guī)律,并結(jié)合搜集到的部分歷史水位資料,綜合分析確定了以該水庫(kù)壩前水位站和壩后水位站分別作為本測(cè)區(qū)的基本水位站并設(shè)站觀測(cè)水位,結(jié)合歷史數(shù)據(jù)和測(cè)量期間的實(shí)測(cè)數(shù)據(jù)確定了兩站的測(cè)深基準(zhǔn)面,同時(shí)布設(shè)了7 處臨時(shí)水位站,開展同步水位觀測(cè),采用水位相關(guān)法及GNSS PPK 水位測(cè)量數(shù)據(jù)求取各臨時(shí)水位站的測(cè)深基準(zhǔn)面。測(cè)深基準(zhǔn)面亦連測(cè)至1985 國(guó)家高程基準(zhǔn)。
1.3 水位控制
該庫(kù)區(qū)水位變化主要受上游來(lái)水、季節(jié)性降水和人工控制水閘調(diào)節(jié)蓄水等影響,有其多年的季節(jié)性規(guī)律,通過(guò)對(duì)搜集的水位資料進(jìn)行分析,確定了其水位變化特點(diǎn):庫(kù)區(qū)壩前水位一天內(nèi)變化緩慢,日變化量小;7、8、11 月的壩前月平均水位相對(duì)較低,壩后月水位相對(duì)較高;12 月份到轉(zhuǎn)年3 月份壩前月平均水位有逐漸變高趨勢(shì),壩后月平均水位有逐漸變低趨勢(shì),壩前月平均水位在3、4 月份一般處于峰值。
本次測(cè)量共布設(shè)了水位站9 處,各個(gè)水位站具體位置如下圖所示:

圖1 水位站位置示意圖
其中壩前站和壩后站作為本次測(cè)量庫(kù)區(qū)的基本水位站,在組織實(shí)施水深測(cè)量時(shí),分區(qū)域進(jìn)行同步水位觀測(cè);考慮到庫(kù)區(qū)水位變化主要取決于上游來(lái)水、季節(jié)性降水和人工大壩調(diào)節(jié)等因素,合理安排同步水位觀測(cè)時(shí)間,確保了水位觀測(cè)的可靠性、連續(xù)性和一致性。
2 GNSS PPK 水位測(cè)量
2.1 GNSS PPK 測(cè)量原理
PPK技術(shù)是利用載波相位進(jìn)行事后差分的GPS定位技術(shù),是一種動(dòng)態(tài)測(cè)量后處理模式。其工作原理是:利用進(jìn)行同步觀測(cè)的一臺(tái)基準(zhǔn)站接收機(jī)和一臺(tái)流動(dòng)站接收機(jī)對(duì)衛(wèi)星進(jìn)行載波相位觀測(cè);后處理時(shí)在計(jì)算機(jī)中利用GPS 處理軟件進(jìn)行線性組合,形成虛擬的載波相位觀測(cè)量值,確定接收機(jī)之間厘米級(jí)的相對(duì)位置。
在已知控制點(diǎn)上架設(shè)基準(zhǔn)站,并準(zhǔn)確量取天線高度。其中測(cè)區(qū)1 上游基準(zhǔn)站至流動(dòng)站最遠(yuǎn)距離 9.3 km,下游基準(zhǔn)站至流動(dòng)站最遠(yuǎn)距離8.8 km;測(cè)區(qū)2 基準(zhǔn)站至流動(dòng)站最遠(yuǎn)距離10 km;測(cè)區(qū)3 基準(zhǔn)站至流動(dòng)站最遠(yuǎn)距離6 km。

圖2 基準(zhǔn)站和水位站的位置關(guān)系
在船體重心位置且開闊區(qū)域架設(shè)流動(dòng)站,準(zhǔn)確量取流動(dòng)站天線至水面高度。
在iRTK 手簿分別配置并啟動(dòng)基準(zhǔn)站和流動(dòng)站。其中設(shè)置基準(zhǔn)站時(shí)需要輸入控制點(diǎn)坐標(biāo)(BLH)及天線高度;基準(zhǔn)站和流動(dòng)站作業(yè)模式選擇PPK 模式,衛(wèi)星截止高度角均設(shè)置為15°,采樣頻率均設(shè)置為1 Hz。
開始測(cè)量前,基準(zhǔn)站和流動(dòng)站初始化觀測(cè)20分鐘,而后開展正常PPK 數(shù)據(jù)采集。測(cè)量船走航期間,連續(xù)采集PPK 數(shù)據(jù);測(cè)量船靠岸后,仍需開展20 分鐘觀測(cè),然后再關(guān)閉所有設(shè)備電源;整個(gè)測(cè)量期間,岸邊水位站同步觀測(cè)。
1)高程異常求解
本項(xiàng)目中應(yīng)用了平面擬合法與固定差改正法求解高程擬合參數(shù)。平面擬合法,設(shè)測(cè)區(qū)內(nèi)高程控制點(diǎn)的平面坐標(biāo)為(xi,yi),此時(shí)選用插值函數(shù):

固定差改正法即在地形起伏變化較小區(qū)域,認(rèn)為測(cè)區(qū)內(nèi)各點(diǎn)的高程異常值是相同的,通過(guò)已知控制點(diǎn)的高程異常值,取其平均值,作為測(cè)區(qū)內(nèi)高程異常加常數(shù)。
采用已知控制點(diǎn),分別應(yīng)用平面擬合法和固定差改正法求解高程擬合參數(shù),最終各個(gè)點(diǎn)位殘差數(shù)據(jù)值均小于3 cm。
2)基線解算
采用專用軟件處理PPK 模式下的采集數(shù)據(jù),進(jìn)行基線解算,得到解算報(bào)告。
3)基面確定
由于測(cè)區(qū)水文條件復(fù)雜,水勢(shì)變化大,所以在測(cè)區(qū)結(jié)合水位站長(zhǎng)期觀測(cè)數(shù)據(jù)和PPK 模式沿河道采集的測(cè)區(qū)各個(gè)位置的水面高程數(shù)據(jù),分別確定了庫(kù)區(qū)上下游的基面。
由于庫(kù)區(qū)上游水流較快,水位落差變化較大,通過(guò)GNSS PPK 觀測(cè)發(fā)現(xiàn)瞬時(shí)水位呈非線性變化,考慮到測(cè)區(qū)上邊界距離大壩后站存在一定距離,本次采用GNSS PPK 沿河道快速往返測(cè)量的方式(盡可能消弱時(shí)間變化造成的影響)確定了上游河道的落差趨勢(shì),通過(guò)多次觀測(cè)分析確認(rèn)上游存在一處水面坡降折點(diǎn),水流經(jīng)此處后河道變寬,水面坡降變緩,如圖3~4 所示:
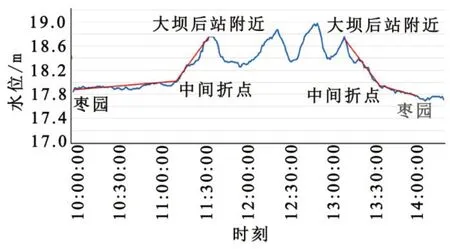
圖3 庫(kù)區(qū)上游PPK 水位采集
庫(kù)區(qū)下游通過(guò)GNSS PPK 觀測(cè)發(fā)現(xiàn)瞬時(shí)水位基本呈線性變化,與水位站同步觀測(cè)的結(jié)果吻合,由此得到下游測(cè)深基準(zhǔn)面。
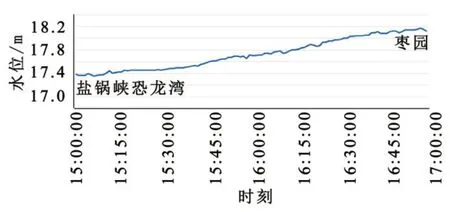
圖4 庫(kù)區(qū)下游PPK 水位采集
4)水位推算
采用專用數(shù)據(jù)處理軟件對(duì)基線解算報(bào)告分別進(jìn)行濾波處理、水位改正數(shù)改正等工作,其中水位改正時(shí)輸入測(cè)區(qū)基面控制點(diǎn)位置及其基面高程和河道拐點(diǎn)坐標(biāo),最終得到走航式水位文件。
2.2 與人工觀測(cè)水位的比對(duì)
(1)靜態(tài)情況下比對(duì)
將基準(zhǔn)站架設(shè)于碼頭站作為控制點(diǎn),流動(dòng)站架設(shè)于已知控制點(diǎn)做PPK 靜態(tài)實(shí)驗(yàn)。采集數(shù)據(jù)與控制點(diǎn)已知高程相比得誤差分布圖,其中實(shí)驗(yàn)最大偏差3 cm。
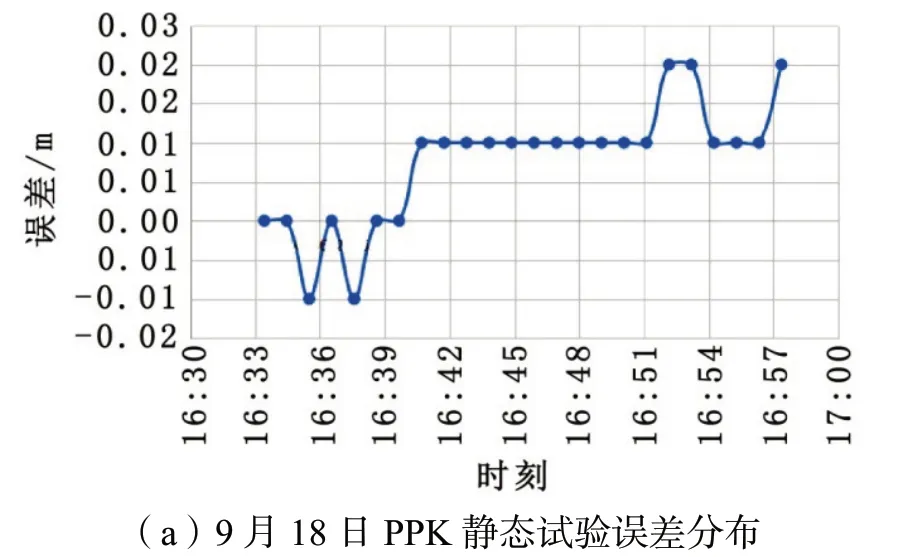
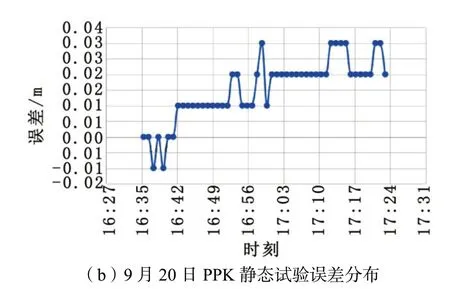
圖5 兩日PPK 誤差分布圖
(2)動(dòng)態(tài)情況下比對(duì)
根據(jù)測(cè)量船應(yīng)用PPK 模式在4 個(gè)水位站附近位置采集的在航水位數(shù)據(jù)與同時(shí)刻水位站采集水位數(shù)據(jù)相比較,可得PPK 在航水位測(cè)量精度。通過(guò)85 高程數(shù)據(jù)對(duì)水位站水位與PPK 水位進(jìn)行比較。
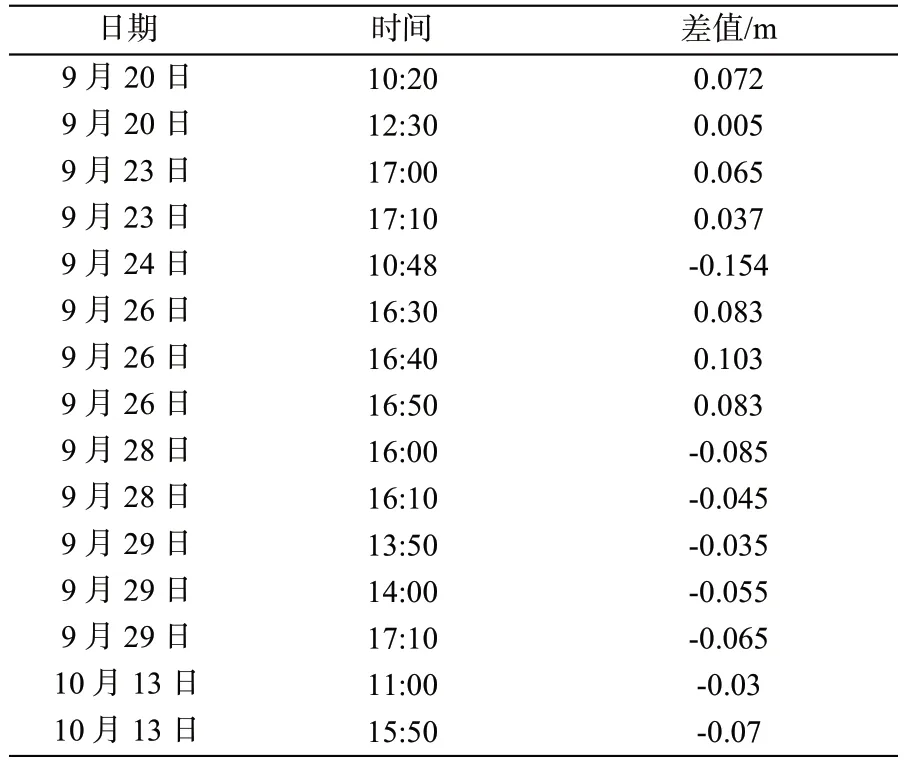
表1 測(cè)量船PPK 動(dòng)態(tài)結(jié)果比較
2.3 水位改正方案
測(cè)量期間沿岸布設(shè)3 處水位站均與壩前站有同步觀測(cè)數(shù)據(jù),其同步觀測(cè)瞬時(shí)水位落差分別為 0.219 m、0.163 m 和0.126 m。兩端兩站水位相關(guān)性良好,滿足直線分帶改正的基本條件,最終決定采用壩前站和臨時(shí)1#站對(duì)庫(kù)區(qū)水深進(jìn)行水位改正,其水位相關(guān)曲線圖如圖6 所示。
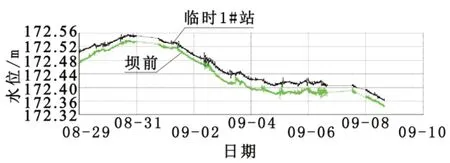
圖6 壩前站水位曲線
測(cè)量期間該區(qū)域同時(shí)使用水位站同步觀測(cè)及PPK 水位測(cè)量?jī)煞N模式進(jìn)行作業(yè),考慮到該區(qū)域水流湍急且存在一定落差,最終使用成果GNSS PPK模式進(jìn)行水位改正;改正后三維側(cè)掃聲吶及條帶測(cè)深儀數(shù)據(jù)條帶拼接良好,主檢測(cè)線比對(duì)滿足規(guī)范要求。
碼頭站和壩前站同步觀測(cè)瞬時(shí)水位差為 0.309 m,兩站水位曲線變化態(tài)勢(shì)一致,使用雙站直線分帶改正。

圖7 碼頭站水位曲線
3 分析與討論
為控制水深測(cè)量成果質(zhì)量,本次測(cè)量使用單波束進(jìn)行檢查線測(cè)量,比對(duì)半徑按照?qǐng)D上間距1 mm設(shè)定。主檢測(cè)線共比對(duì)206 點(diǎn),超限點(diǎn)為16 個(gè),占比7.8 %;主檢測(cè)線共比對(duì)786 點(diǎn),超限點(diǎn)為33個(gè),占比4.2 %;比對(duì)結(jié)果顯示主檢測(cè)線水深符合情況良好,符合測(cè)量規(guī)范要求。
項(xiàng)目采用GNSS PPK 技術(shù)進(jìn)行了高精度的三維水深測(cè)量,有效地解決了測(cè)量區(qū)域河道彎曲、水面坡降變化大帶來(lái)的傳統(tǒng)水位測(cè)量方法無(wú)法準(zhǔn)確控制水位的難題。通過(guò)GNSS PPK 采集水位數(shù)據(jù)與水位站觀測(cè)水位數(shù)據(jù)比對(duì),及最終水深成果主檢比對(duì)表明,GNSS PPK 水位測(cè)量數(shù)據(jù)精度能夠滿足常規(guī)水深測(cè)量的需求,且具有如下優(yōu)勢(shì):
1)在水文條件復(fù)雜,水勢(shì)變化大的水域具有顯著的技術(shù)優(yōu)勢(shì),可有效減少水位站的設(shè)立,且在水深成果解算過(guò)程中能夠有效消除船只動(dòng)態(tài)吃水和涌浪等因素帶來(lái)的水深成果誤差;
2)不需建立數(shù)據(jù)傳輸,避免了距離上的限制,作業(yè)半徑大,基本可以控制50~80 km 的距離,其平面定位精度可達(dá)±10 mm+1 ppm×D,高程精度可達(dá)±10 mm+1 ppm×D(D 為基線長(zhǎng)度);
3)克服了傳統(tǒng)固定水位站水位獲取方法的不足,實(shí)現(xiàn)了實(shí)時(shí)實(shí)地水位獲取,確保了獲取水位的現(xiàn)勢(shì)性和準(zhǔn)確性。
在本次測(cè)量過(guò)程中有效解決了以下水位控制方面的技術(shù)難點(diǎn):
1)測(cè)區(qū)空間跨度大,多為自然岸線,人工構(gòu)筑物也均為斜坡式構(gòu)筑物,設(shè)立水位站難度大;
2)庫(kù)區(qū)枯水季和豐水期水位落差達(dá)8~9 m,同時(shí)由于大壩人工調(diào)節(jié)徑流量,使得水位采集數(shù)據(jù)有出現(xiàn)震動(dòng)不規(guī)律現(xiàn)象;
3)測(cè)區(qū)共布設(shè)了9 個(gè)水位站,由于測(cè)區(qū)跨度大,有水庫(kù)和上游內(nèi)河,測(cè)量期間只能采用分段測(cè)量方式進(jìn)行,合理選擇了壩前和壩后兩個(gè)水位站為基本水位站長(zhǎng)期觀測(cè)水位,確保了水深作業(yè)后水位后處理改正的基準(zhǔn)一致性;
4)以壩前和壩后兩個(gè)水位站為基本水位站,采用水位相關(guān)的方法確定臨時(shí)水位站的測(cè)深基準(zhǔn)面,充分考慮了水下地形高程不同的影響,避免了使用同一測(cè)深基準(zhǔn)面帶來(lái)的測(cè)量誤差,使最終制圖成果實(shí)用效果更強(qiáng),保證了測(cè)量成果的精度。
4 結(jié)語(yǔ)
GNSS PPK 水位測(cè)量模式僅需設(shè)立基準(zhǔn)站,流動(dòng)站架設(shè)方便,其能解算沿航跡點(diǎn)的基于穩(wěn)定高程異常值下的水下正常高,點(diǎn)與點(diǎn)間時(shí)間間隔短,能夠點(diǎn)對(duì)點(diǎn)的提供密集的水位改正信息,可有效提升水深測(cè)量精度。在庫(kù)區(qū)相對(duì)典型區(qū)域使用PPK 測(cè)量方法進(jìn)行數(shù)據(jù)后處理,并與傳統(tǒng)水位改正方法所出成果進(jìn)行對(duì)比分析,兩種方式精度相當(dāng),為以后類似測(cè)量任務(wù)提供了技術(shù)支撐和依據(jù)。
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級(jí)版)(2015年4期)2015-04-29 00:00:00
