基于徑向基函數(shù)和自組織映射的導(dǎo)彈控制系統(tǒng)健康狀態(tài)評估
2022-05-13 05:18:26劉月劉鐵林姜相爭韓月明
兵工學(xué)報(bào) 2022年4期
關(guān)鍵詞:故障
劉月, 劉鐵林, 姜相爭, 韓月明
(1.陸軍工程大學(xué)石家莊校區(qū) 裝備指揮與管理系, 河北 石家莊 050000; 2.93786部隊(duì), 河北 張家口 075000)
0 引言
隨著軍隊(duì)信息化、智能化建設(shè)的不斷發(fā)展與推進(jìn),導(dǎo)彈武器系統(tǒng)功能不斷擴(kuò)展,規(guī)模日益擴(kuò)大,但同時(shí)也由于系統(tǒng)復(fù)雜性、關(guān)聯(lián)性、任務(wù)環(huán)境多樣性等導(dǎo)致一系列新的故障問題,傳統(tǒng)導(dǎo)彈故障檢測和維修保障方法越來越無法適應(yīng)現(xiàn)代戰(zhàn)爭快節(jié)奏、高效率的裝備精準(zhǔn)保障需求。因此有學(xué)者提出視情維修(CBM)的理念,用以實(shí)現(xiàn)武器裝備故障及健康狀態(tài)的精確認(rèn)知,降低維修保障成本,提高導(dǎo)彈的安全性和可用性。
控制系統(tǒng)是導(dǎo)彈能夠完成任務(wù)的關(guān)鍵,對導(dǎo)彈的控制系統(tǒng)進(jìn)行健康狀態(tài)評估,有助于提高導(dǎo)彈裝備全壽命可用度,優(yōu)化裝備維修決策與戰(zhàn)場綜合保障,做到早診斷、早發(fā)現(xiàn)、早維修、適時(shí)微損微修。傳統(tǒng)導(dǎo)彈武器裝備的健康狀態(tài)評估方法通常為專家評分法,即專家根據(jù)測試參數(shù)的結(jié)果,按照經(jīng)驗(yàn)進(jìn)行任務(wù)系統(tǒng)選擇。這一類方法嚴(yán)重依賴設(shè)計(jì)人員與產(chǎn)品專家的經(jīng)驗(yàn)與水平,效率低,準(zhǔn)確度差。對于大規(guī)模的測試數(shù)據(jù)結(jié)果,數(shù)據(jù)可靠度低,有較高的偶然性,不利于對對象產(chǎn)品進(jìn)行健康狀態(tài)評估。
目前常用基于數(shù)據(jù)驅(qū)動(dòng)的健康狀態(tài)評估算法可以分為基于概率的評估方法和基于神經(jīng)網(wǎng)絡(luò)的評估方法。基于概率的評估方法主要包括隱馬爾可夫模型(HMM)和高斯混合模型(GMM)。HMM模型通過一個(gè)馬爾可夫鏈來描述模型中各種狀態(tài)之間的轉(zhuǎn)移過程,而馬爾可夫鏈中觀測量與狀態(tài)量之間可以通過隨機(jī)過程描述二者的對應(yīng)關(guān)系,通過構(gòu)建不同健康狀態(tài)的HMM模型,可以實(shí)現(xiàn)健康狀態(tài)的識(shí)別。GMM模型是指多個(gè)高斯分布函數(shù)的線性組合,通常用于解決同一集合下數(shù)據(jù)包含多個(gè)不同分布的情況。通過構(gòu)建不同健康狀態(tài)下的概率密度函數(shù),可以計(jì)算不同概率密度函數(shù)之間的距離,實(shí)現(xiàn)健康狀態(tài)的度量。然而,HMM模型的訓(xùn)練需要大量的先驗(yàn)概率,GMM模型必須假設(shè)數(shù)據(jù)基本服從高斯分布,目前導(dǎo)彈武器裝備的監(jiān)測數(shù)據(jù)卻很難滿足這些要求。基于神經(jīng)網(wǎng)絡(luò)的評估方法包括徑向基函數(shù)(RBF)網(wǎng)絡(luò)以及自組織映射(SOM)網(wǎng)絡(luò)。RBF網(wǎng)絡(luò)是一種典型的三層前饋神經(jīng)網(wǎng)絡(luò),能夠通過RBF實(shí)現(xiàn)不同健康狀態(tài)數(shù)據(jù)的聚類或分類。一方面,目前基于RBF的故障診斷模型主要是以系統(tǒng)的輸出數(shù)據(jù)為輸入,系統(tǒng)狀態(tài)為輸出構(gòu)建RBF網(wǎng)絡(luò),然而該方法并不適用于具有反饋信號(hào)的控制系統(tǒng)故障診斷;另一方面,目前基于RBF的故障診斷模型僅針對單一工作狀態(tài)和測試輸入信號(hào)條件下的故障診斷問題,即存在唯一的故障判據(jù)或故障判別閾值,無法解決具有不同故障判別閾值的多工作狀態(tài)和輸入信號(hào)條件故障診斷。SOM網(wǎng)絡(luò)是一種無監(jiān)督學(xué)習(xí)模型,通過神經(jīng)元之間的競爭學(xué)習(xí)過程實(shí)現(xiàn)不同健康狀態(tài)數(shù)據(jù)的聚類或分類。目前基于SOM網(wǎng)絡(luò)的健康狀態(tài)評估模型僅利用健康狀態(tài)的監(jiān)測數(shù)據(jù)構(gòu)建SOM網(wǎng)絡(luò),通過衡量當(dāng)前狀態(tài)與健康狀態(tài)的偏離程度實(shí)現(xiàn)健康度的計(jì)算,然而該方法并未考慮到當(dāng)前狀態(tài)與故障狀態(tài)偏離程度的影響。
為實(shí)現(xiàn)導(dǎo)彈控制系統(tǒng)準(zhǔn)確、高效、客觀的健康狀態(tài)評估,本文開展基于數(shù)據(jù)驅(qū)動(dòng)的導(dǎo)彈控制系統(tǒng)健康狀態(tài)評估算法研究。考慮到導(dǎo)彈控制系統(tǒng)在實(shí)際使用和測試過程中的反饋特性以及具有不同的工作狀態(tài)和輸入信號(hào)要求,本文一方面考慮控制系統(tǒng)的輸入輸出信號(hào),利用RBF網(wǎng)絡(luò)建立控制系統(tǒng)的故障觀測器并生成輸出信號(hào)殘差,另一方面構(gòu)建新的RBF網(wǎng)絡(luò),用于計(jì)算不同的工作狀態(tài)和輸入信號(hào)條件下的自適應(yīng)判別閾值。同時(shí)考慮當(dāng)前狀態(tài)、健康狀態(tài)和故障狀態(tài)三者之間的偏離關(guān)系,建立基于健康狀態(tài)和故障狀態(tài)監(jiān)測數(shù)據(jù)的SOM網(wǎng)絡(luò),用于未發(fā)生故障的導(dǎo)彈控制系統(tǒng)的健康狀態(tài)評估。
1 整體思路
導(dǎo)彈控制系統(tǒng)健康狀態(tài)評估的整體思路和流程如圖1所示,共包含兩個(gè)部分,基于RBF網(wǎng)絡(luò)的自適應(yīng)故障觀測器以及基于SOM網(wǎng)絡(luò)的健康狀態(tài)評估模型。
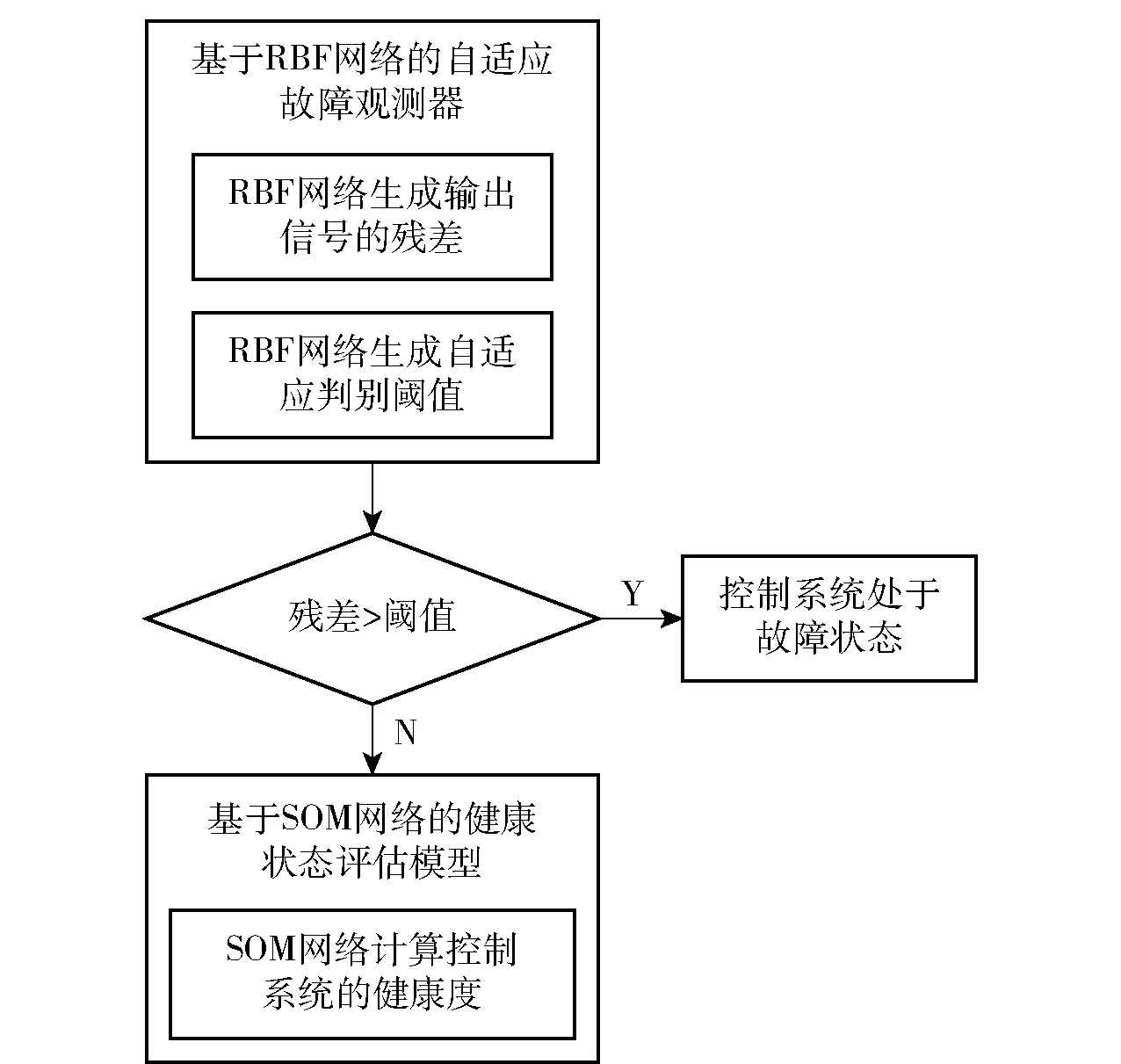
圖1 整體思路和流程Fig.1 Overall idea and process
在基于RBF網(wǎng)絡(luò)的自適應(yīng)故障觀測器中,首先利用RBF網(wǎng)絡(luò)模擬控制系統(tǒng)的觀測器,計(jì)算輸出信號(hào)并評估輸出信號(hào)的殘差,然后利用RBF網(wǎng)絡(luò)生成不同工作狀態(tài)、不同輸入信號(hào)下殘差的自適應(yīng)判別閾值,并判定導(dǎo)彈控制系統(tǒng)是否發(fā)生故障。若發(fā)生故障,則此時(shí)導(dǎo)彈控制系統(tǒng)的健康度為0,需要進(jìn)行進(jìn)一步檢查和維修;若判定導(dǎo)彈控制系統(tǒng)未發(fā)生故障,則對導(dǎo)彈的健康狀態(tài)進(jìn)行評估。在基于SOM網(wǎng)絡(luò)的健康狀態(tài)評估模型中,利用SOM網(wǎng)絡(luò)對殘差數(shù)據(jù)進(jìn)行聚類分析,并對導(dǎo)彈控制系統(tǒng)的健康狀態(tài)進(jìn)行評估。
2 基于RBF網(wǎng)絡(luò)的自適應(yīng)故障觀測器
2.1 RBF網(wǎng)絡(luò)
RBF網(wǎng)絡(luò)是一種常用的三層前饋神經(jīng)網(wǎng)絡(luò),包括輸入層、隱含層和輸出層。其中:隱含層的作用是把向量從低維度映射到高維度,使得低維度線性不可分的情況到高維度就可以線性可分;輸入層和隱含層間由高斯函數(shù)映射構(gòu)成,可以將輸入矢量直接映射到隱空間,因此從輸入空間到隱含層空間的變換是非線性的;輸出層與隱含層則由簡單的線性函數(shù)映射構(gòu)成,即網(wǎng)絡(luò)的輸出是隱單元輸出的線性加權(quán)和,因此從隱含層空間到輸出層空間變換是線性的。由于網(wǎng)絡(luò)由輸入到輸出的映射是非線性的,而網(wǎng)絡(luò)輸出對可調(diào)權(quán)重卻又是線性的,網(wǎng)絡(luò)的權(quán)重就可由線性方程組直接解出,從而可大大加快學(xué)習(xí)速度并避免局部極小問題。
RBF是一個(gè)取值僅依賴于離原點(diǎn)距離的實(shí)值函數(shù),即()=(‖‖)(為輸入節(jié)點(diǎn)向量),或者還可以是到任意一點(diǎn)的距離,也就是(,)=(‖-‖)(為中心向量)。通常使用高斯函數(shù)作為RBF:

(1)
式中:為第個(gè)RBF的中心;為第個(gè)RBF的方差,它決定了該基函數(shù)圍繞中心點(diǎn)的寬度;為RBF的個(gè)數(shù)。
在傳統(tǒng)反向傳播(BP)神經(jīng)網(wǎng)絡(luò)中,網(wǎng)絡(luò)的求解參數(shù)包括輸入層到隱含層的連接權(quán)值以及隱含層到輸出層的連接權(quán)值;而在RBF網(wǎng)絡(luò)中,由于輸入層到隱含層的線性連接被RBF所代替,RBF網(wǎng)絡(luò)的求解參數(shù)有3個(gè):RBF的中心、方差以及隱含層到輸出層的連接權(quán)值。
1)RBF的中心。通過K-means聚類方法確定聚類中心,并將第類樣本的聚類中心作為第個(gè)RBF的中心。
2)RBF的方差。RBF標(biāo)準(zhǔn)差的確定原則是使所有RBF單元的接受域之和覆蓋整個(gè)訓(xùn)練樣本空間,因此可以令相應(yīng)的標(biāo)準(zhǔn)差等于其與屬于該類訓(xùn)練樣本之間的平均距離,即

(2)
式中:為屬于第類樣本的樣本數(shù);表示屬于以為聚類中心的第類樣本。
3)隱含層到輸出層的連接權(quán)值。權(quán)值的調(diào)整采用梯度下降法,其迭代公式為
(+1)=()+(-)()
(3)
式中:()為隱藏層到輸出層的連接權(quán)重矩陣;為學(xué)習(xí)速率;為網(wǎng)絡(luò)的期望輸出;為網(wǎng)絡(luò)的實(shí)際輸出;()為隱含層輸出。
2.2 自適應(yīng)故障觀測器
在控制系統(tǒng)中,觀測器是一種可以根據(jù)系統(tǒng)輸入和輸出變量實(shí)測值來實(shí)現(xiàn)狀態(tài)變量估值的動(dòng)態(tài)系統(tǒng),因此經(jīng)常構(gòu)建故障觀測器以對控制系統(tǒng)進(jìn)行故障診斷。故障診斷基本原理是利用控制系統(tǒng)的真實(shí)輸出與觀測器的估計(jì)輸出生成殘差,并與相應(yīng)的故障判別閾值進(jìn)行比較。
然而這種方法主要適用于線性控制系統(tǒng),且要求沒有未知參數(shù)。針對現(xiàn)階段交聯(lián)關(guān)系復(fù)雜的控制系統(tǒng)以及非線性故障特征,傳統(tǒng)基于數(shù)學(xué)模型的故障觀測器已不再適用。考慮到RBF網(wǎng)絡(luò)具有強(qiáng)大的非線性擬合能力,且僅需要控制系統(tǒng)的輸入和輸出信息,不需要考慮大量的系統(tǒng)參數(shù),因此采用RBF網(wǎng)絡(luò)作為非線性函數(shù)估計(jì)器對控制系統(tǒng)進(jìn)行重構(gòu),構(gòu)建逼近控制系統(tǒng)真實(shí)情況的故障觀測器,以解決復(fù)雜控制系統(tǒng)的故障檢測問題。
將傳統(tǒng)觀測器與RBF網(wǎng)絡(luò)相結(jié)合,建立基于RBF網(wǎng)絡(luò)的自適應(yīng)故障觀測器,其結(jié)構(gòu)原理圖如圖2所示。
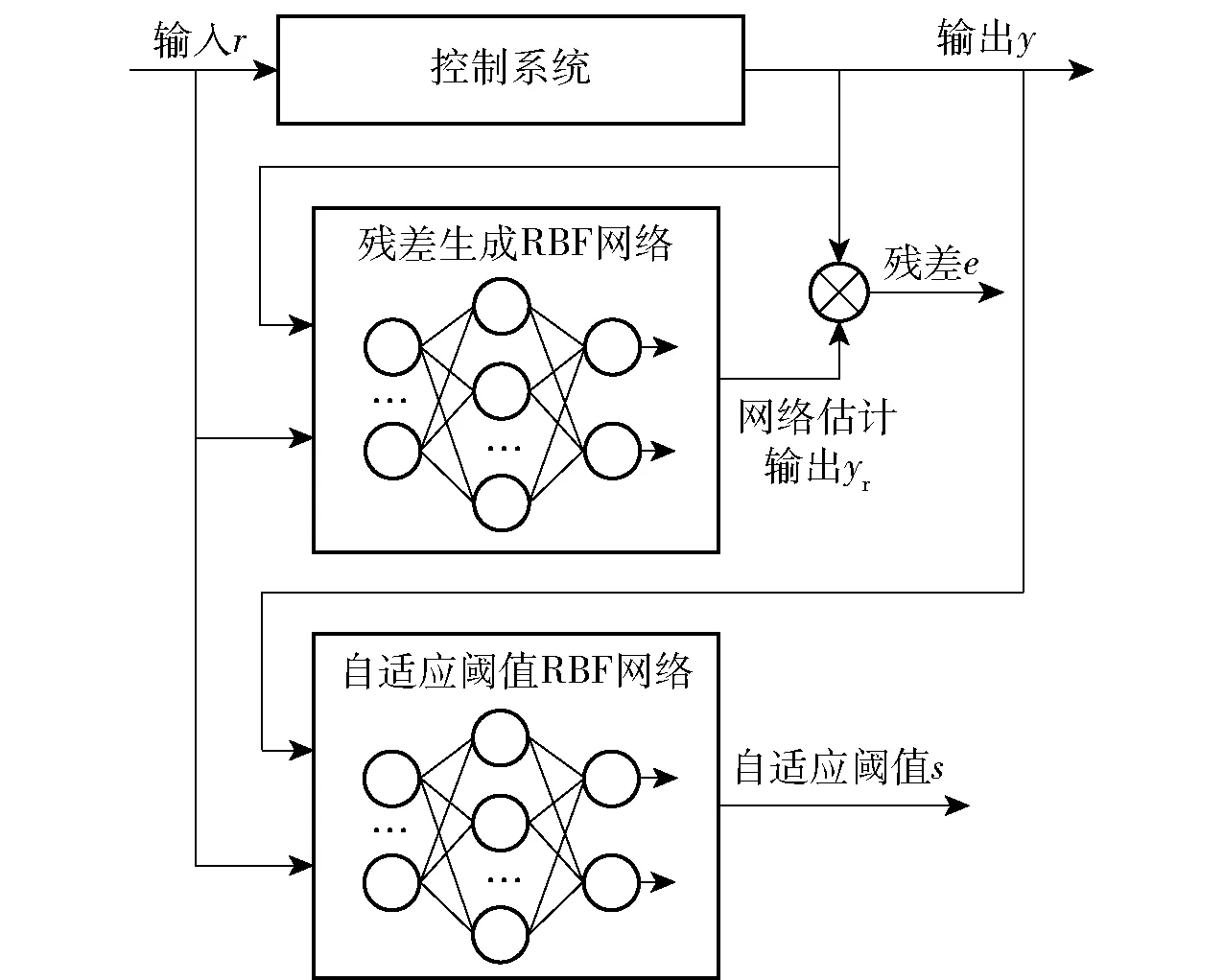
圖2 基于RBF網(wǎng)絡(luò)的自適應(yīng)故障觀測器Fig.2 Adaptive fault observer based on RBF network
該故障觀測器包括兩個(gè)RBF網(wǎng)絡(luò):第1個(gè)是殘差生成RBF網(wǎng)絡(luò),RBF網(wǎng)絡(luò)以控制系統(tǒng)的輸入和輸出信號(hào)為網(wǎng)絡(luò)輸入,以控制系統(tǒng)的估計(jì)輸出信號(hào)為網(wǎng)絡(luò)輸出,用于計(jì)算控制系統(tǒng)的實(shí)際輸出信號(hào)與估計(jì)輸出信號(hào)的殘差;第2個(gè)是自適應(yīng)閾值RBF網(wǎng)絡(luò),RBF網(wǎng)絡(luò)以控制系統(tǒng)輸入和輸出信號(hào)為網(wǎng)絡(luò)輸入,以不同工作狀態(tài)、不同輸入信號(hào)下故障判別閾值為網(wǎng)絡(luò)的輸出,用以生成隨系統(tǒng)狀態(tài)或者輸入指令變化的判別閾值,排除因非故障原因引起的誤差。
利用基于RBF網(wǎng)絡(luò)的自適應(yīng)故障觀測器進(jìn)行故障檢測的基本原理,依然是基于殘差與故障判別閾值的比較,當(dāng)計(jì)算殘差超過此時(shí)判別閾值時(shí)控制系統(tǒng)發(fā)生故障。具體實(shí)施步驟如下:
1)選取控制系統(tǒng)在所有工作狀態(tài)以及所有輸入信號(hào)下的正常輸入和輸出信號(hào)。
2)設(shè)置RBF網(wǎng)絡(luò)結(jié)構(gòu)參數(shù)。
3)分別建立不同工作狀態(tài)下的殘差生成RBF網(wǎng)絡(luò)。對不同工作狀態(tài)下的殘差生成RBF網(wǎng)絡(luò)進(jìn)行訓(xùn)練,訓(xùn)練數(shù)據(jù)輸入為各工作狀態(tài)下正常的輸入和輸出信號(hào),訓(xùn)練數(shù)據(jù)輸出為各工作狀態(tài)下的正常殘差數(shù)據(jù)。
4)建立統(tǒng)一自適應(yīng)閾值RBF網(wǎng)絡(luò)。對自適應(yīng)閾值RBF網(wǎng)絡(luò)進(jìn)行訓(xùn)練,訓(xùn)練數(shù)據(jù)的輸入為控制系統(tǒng)正常的輸入和輸出信號(hào),訓(xùn)練數(shù)據(jù)的輸出為各工作狀態(tài)以及各輸入信號(hào)下的故障閾值。
5)對于待評估數(shù)據(jù),首先利用構(gòu)建完成統(tǒng)一的自適應(yīng)閾值RBF網(wǎng)絡(luò),輸入待評估數(shù)據(jù)對應(yīng)的輸入信號(hào)以及對應(yīng)工作狀態(tài)下的正常輸出信號(hào),生成故障判別閾值;其次利用對應(yīng)工作狀態(tài)下構(gòu)建完成的殘差生成RBF網(wǎng)絡(luò),輸入待評估數(shù)據(jù)對應(yīng)的輸入和輸出信號(hào),生成對應(yīng)的殘差。若殘差超過自適應(yīng)閾值,則判定控制系統(tǒng)故障。
3 基于SOM網(wǎng)絡(luò)的健康狀態(tài)評估模型
3.1 SOM網(wǎng)絡(luò)
SOM網(wǎng)絡(luò)是一種自組織競爭人工神經(jīng)網(wǎng)絡(luò),它以無監(jiān)督競爭學(xué)習(xí)方式進(jìn)行網(wǎng)絡(luò)訓(xùn)練,具有自組織功能。SOM網(wǎng)絡(luò)結(jié)構(gòu)只有輸入層和競爭層2層,輸入層神經(jīng)元的數(shù)量由輸入向量的維度決定;常見的競爭層有一維結(jié)構(gòu)和二維結(jié)構(gòu),其神經(jīng)元數(shù)量決定了最終模型的粒度與規(guī)模。SOM網(wǎng)絡(luò)的基本思想是網(wǎng)絡(luò)競爭層中的各神經(jīng)元通過競爭來獲取對輸入模式的響應(yīng)機(jī)會(huì),最后剩一個(gè)神經(jīng)元成為競爭的勝利者,并對那些與獲勝神經(jīng)元有關(guān)的各連接全朝著更有利于它競爭的方向調(diào)整。
SOM網(wǎng)絡(luò)的學(xué)習(xí)過程有別于BP網(wǎng)絡(luò),不需要提前給定任何目標(biāo)輸出,可以不必知道輸入矢量的類型關(guān)系,因此該網(wǎng)絡(luò)常用于數(shù)據(jù)聚類或分類。當(dāng)輸入矢量輸入到網(wǎng)絡(luò)后,網(wǎng)絡(luò)利用隨機(jī)選取的權(quán)值進(jìn)行計(jì)算,并找到優(yōu)勝神經(jīng)元;然后調(diào)整權(quán)值,用收縮鄰域和學(xué)習(xí)因子(隨時(shí)間而收縮)的辦法,最終使權(quán)值形成一組能映射輸入的數(shù)據(jù),當(dāng)網(wǎng)絡(luò)自組織形成時(shí)訓(xùn)練就結(jié)束。具體訓(xùn)練過程如下:
初始化,對競爭層各神經(jīng)元權(quán)重賦隨機(jī)數(shù)初值并進(jìn)行歸一化,建立初始優(yōu)勝鄰域和學(xué)習(xí)率。
對輸入數(shù)據(jù)進(jìn)行歸一化處理。
遍歷競爭層中每一個(gè)神經(jīng)元,計(jì)算輸入數(shù)據(jù)與每一個(gè)神經(jīng)元之間的相似度,即與該神經(jīng)元的連接權(quán)重向量的相似度,并選取距離最小的神經(jīng)元作為優(yōu)勝神經(jīng)元。
確定優(yōu)勝鄰域包含的神經(jīng)元。優(yōu)勝鄰域?yàn)橛?xùn)練時(shí)間的函數(shù),一般初始鄰域較大,而后鄰域隨訓(xùn)練時(shí)間逐漸收縮,常用的收縮鄰域包括摩爾鄰域和六邊形網(wǎng)格領(lǐng)域。
計(jì)算優(yōu)勝鄰域內(nèi)神經(jīng)元各自的學(xué)習(xí)率并更新它們的權(quán)重。基本思想是:越靠近優(yōu)勝節(jié)點(diǎn),學(xué)習(xí)率越大;越遠(yuǎn)離優(yōu)勝節(jié)點(diǎn),學(xué)習(xí)率越小,即

(4)
(,)=()e-
(5)

完成一輪迭代,返回步驟2,直到學(xué)習(xí)率降為0或滿足設(shè)定的迭代次數(shù)。
在訓(xùn)練好的SOM網(wǎng)絡(luò)中,由于競爭層的每一個(gè)神經(jīng)元代表一個(gè)聚類類別,且為該類的聚類中心,輸入層的每一組訓(xùn)練數(shù)據(jù)將最終映射到競爭層的唯一神經(jīng)元中,并以one-hot編碼的形式作為輸出,即每一組訓(xùn)練數(shù)據(jù)對應(yīng)的優(yōu)勝神經(jīng)元輸出為1,其余神經(jīng)元輸出為0。而針對待分類的數(shù)據(jù),計(jì)算其與競爭層每一個(gè)神經(jīng)元的相似度,選擇相似度最大或距離最小的神經(jīng)元作為其分類結(jié)果。
3.2 健康狀態(tài)評估模型
控制系統(tǒng)因結(jié)構(gòu)組成和交聯(lián)關(guān)系非常復(fù)雜,而且狀態(tài)監(jiān)測數(shù)據(jù)及其特征參數(shù)與系統(tǒng)健康度的函數(shù)關(guān)系不明顯,難以建立準(zhǔn)確的模型對其狀態(tài)進(jìn)行有效描述。而SOM神經(jīng)網(wǎng)絡(luò)以其高度的自組織、自學(xué)習(xí)特性,能夠直接建立其狀態(tài)監(jiān)測數(shù)據(jù)和系統(tǒng)健康狀態(tài)之間的關(guān)系。
基于上述分析,本文提出基于SOM網(wǎng)絡(luò)的健康狀態(tài)評估模型。該方法總體思路和其他神經(jīng)網(wǎng)絡(luò)方法基本思想類似,首先是神經(jīng)網(wǎng)絡(luò)的參數(shù)初始化和數(shù)據(jù)準(zhǔn)備,然后利用訓(xùn)練數(shù)據(jù)對神經(jīng)網(wǎng)絡(luò)進(jìn)行參數(shù)訓(xùn)練,最后待訓(xùn)練完成后,將待評估的監(jiān)測數(shù)據(jù)輸入神經(jīng)網(wǎng)絡(luò),用于系統(tǒng)健康狀態(tài)評估分析。
然而與其他神經(jīng)網(wǎng)絡(luò)的不同之處在于,其他神經(jīng)網(wǎng)絡(luò)的構(gòu)建需要大量不同健康狀態(tài)下的監(jiān)測數(shù)據(jù)用于模型訓(xùn)練,健康狀態(tài)的評估過程則是以監(jiān)測數(shù)據(jù)為輸入,直接以對應(yīng)的健康度為輸出;而SOM網(wǎng)絡(luò)只需要利用健康狀態(tài)和故障狀態(tài)的監(jiān)測數(shù)據(jù)進(jìn)行模型訓(xùn)練,待SOM網(wǎng)絡(luò)的權(quán)值收斂穩(wěn)定后,利用SOM網(wǎng)絡(luò)的輸出值建立當(dāng)前狀態(tài)、健康狀態(tài)和故障狀態(tài)之間的相對偏離程度,從而確定系統(tǒng)的健康狀態(tài)。
基于SOM網(wǎng)絡(luò)的健康狀態(tài)評估算法的實(shí)施步驟如下:
1)在所有工作狀態(tài)及所有輸入信號(hào)下,選取控制系統(tǒng)在正常狀態(tài)以及故障狀態(tài)通過殘差生成RBF網(wǎng)絡(luò)獲得的殘差數(shù)據(jù)。
2)設(shè)置SOM神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)參數(shù)。
3)對SOM網(wǎng)絡(luò)進(jìn)行訓(xùn)練,利用不同工作狀態(tài)下正常狀態(tài)和故障狀態(tài)的殘差數(shù)據(jù)分別構(gòu)建SOM網(wǎng)絡(luò),利用訓(xùn)練好的SOM網(wǎng)絡(luò)對正常狀態(tài)和故障狀態(tài)的殘差數(shù)據(jù)進(jìn)行聚類,并將其SOM網(wǎng)絡(luò)輸出作為健康度分別為1和0的健康基準(zhǔn)。
4)對于待評估狀態(tài)的殘差數(shù)據(jù),利用對應(yīng)工作狀態(tài)的訓(xùn)練好的SOM網(wǎng)絡(luò)計(jì)算其與競爭層每一個(gè)神經(jīng)元的相似度,并將該相似度而非one-hot編碼作為SOM網(wǎng)絡(luò)的輸出,計(jì)算該輸出與健康基準(zhǔn)之間的相對距離,獲得此時(shí)控制系統(tǒng)的健康狀態(tài)評估結(jié)果。
4 案例驗(yàn)證
針對某型導(dǎo)彈的控制系統(tǒng)進(jìn)行健康狀態(tài)評估。該控制系統(tǒng)主要由一級(jí)伺服機(jī)構(gòu)、二級(jí)伺服機(jī)構(gòu)、主被動(dòng)雷達(dá)導(dǎo)引頭、二級(jí)綜合控制器、彈頭伺服機(jī)構(gòu)、戰(zhàn)斗彈遙測綜合控制器、引爆控制器等組成。共采集該控制系統(tǒng)的6個(gè)輸入?yún)?shù)以及27個(gè)輸出參數(shù)進(jìn)行健康狀態(tài)評估,具體參數(shù)如表1和表2所示。考慮到在正常情況下,同一發(fā)導(dǎo)彈的檢查間隔周期較長,為了獲取大量測試數(shù)據(jù),收集同一型號(hào)不同導(dǎo)彈測試數(shù)據(jù)進(jìn)行模型的訓(xùn)練和測試。雖然不同導(dǎo)彈由于處在不同退化過程從而導(dǎo)致健康狀態(tài)有差異,但是由于同一型號(hào)不同導(dǎo)彈具有相同的功能結(jié)構(gòu)、制造工藝和貯存環(huán)境,這些導(dǎo)彈在相同退化模式和相同健康狀態(tài)下,依然具有相似的表現(xiàn)形式和測試數(shù)據(jù),即可將這些不同導(dǎo)彈的退化和故障數(shù)據(jù)看作同一導(dǎo)彈的退化和故障數(shù)據(jù)。通常導(dǎo)彈檢查分為模擬飛行總檢查、模擬發(fā)射總檢查以及全裝彈總檢查,為了進(jìn)一步獲取不同工作狀態(tài)下的導(dǎo)彈測試數(shù)據(jù),考慮將不同檢查狀態(tài)下的測試數(shù)據(jù)作為導(dǎo)彈不同工作狀態(tài)下的測試數(shù)據(jù)。
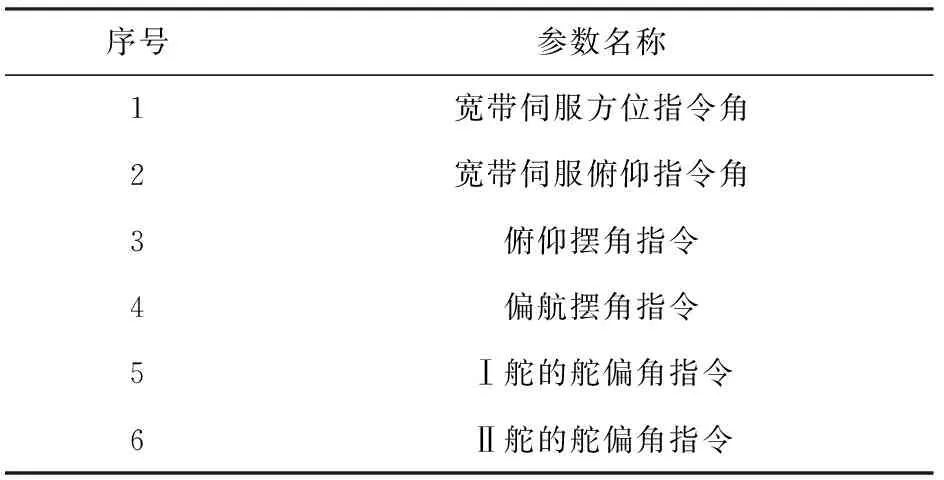
表1 6個(gè)輸入?yún)?shù)
表2 27個(gè)輸出參數(shù)
首先分別構(gòu)建RBF以及SOM網(wǎng)絡(luò)結(jié)構(gòu),其中包括3個(gè)殘差生成RBF網(wǎng)絡(luò)、1個(gè)自適應(yīng)閾值RBF網(wǎng)絡(luò)以及3個(gè)SOM網(wǎng)絡(luò),分別對應(yīng)模擬飛行總檢查、模擬發(fā)射總檢查以及全裝彈總檢查。3個(gè)殘差生成RBF網(wǎng)絡(luò)具有相同的3層網(wǎng)絡(luò)結(jié)構(gòu),輸入層有33個(gè)神經(jīng)元,包括6個(gè)輸入?yún)?shù)和27個(gè)輸出參數(shù);隱含層有10個(gè)神經(jīng)元,通過交叉驗(yàn)證方法確定,輸出層有27個(gè)神經(jīng)元,對應(yīng)27個(gè)輸出參數(shù);自適應(yīng)閾值RBF網(wǎng)絡(luò)有3層,輸入層有33個(gè)神經(jīng)元,包括6個(gè)輸入?yún)?shù)和27個(gè)輸出參數(shù);隱含層有13個(gè)神經(jīng)元,通過交叉驗(yàn)證方法確定,輸出層有27個(gè)神經(jīng)元,對應(yīng)27個(gè)輸出參數(shù)的判別閾值;3個(gè)SOM網(wǎng)絡(luò)也有相同的神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu),其中輸入層是一維結(jié)構(gòu),有27個(gè)神經(jīng)元,競爭層是二維結(jié)構(gòu),具有×階的神經(jīng)元分布,其中的值將根據(jù)不同的聚類數(shù)目來確定。
考慮到RBF網(wǎng)絡(luò)共輸出27個(gè)參數(shù)的殘差,因此控制系統(tǒng)的故障判據(jù)為:若任意某個(gè)參數(shù)的殘差大于其自身的自適應(yīng)閾值,則控制系統(tǒng)處于故障狀態(tài);當(dāng)所有參數(shù)的殘差都小于其自身的自適應(yīng)閾值時(shí),則將該殘差輸入SOM網(wǎng)絡(luò)進(jìn)行健康狀態(tài)評估。其健康度的定義為
(6)
式中:為故障狀態(tài)殘差數(shù)據(jù)在SOM網(wǎng)絡(luò)中的輸出;為正常狀態(tài)殘差數(shù)據(jù)在SOM網(wǎng)絡(luò)中的輸出;為待測殘差數(shù)據(jù)在SOM網(wǎng)絡(luò)中的輸出在和連線上的投影。健康度計(jì)算的示意圖如圖3所示。
圖3 健康度計(jì)算示意圖Fig.3 Schematic diagram of health calculation
為了方便技術(shù)和維修保障人員能夠針對不同的健康狀態(tài)進(jìn)行針對性后勤保障活動(dòng),將健康度分成以下5個(gè)健康狀態(tài)等級(jí),如表3所示。
表3 5個(gè)健康狀態(tài)等級(jí)
本文選擇不同檢查狀態(tài)下導(dǎo)彈控制系統(tǒng)發(fā)生的10種故障模式對基于RBF網(wǎng)絡(luò)的自適應(yīng)故障觀測器的有效性進(jìn)行驗(yàn)證,驗(yàn)證結(jié)果如表4所示。由表4可以看出,本文提出的基于RBF網(wǎng)絡(luò)自適應(yīng)故障觀測器能夠準(zhǔn)確地實(shí)現(xiàn)導(dǎo)彈控制系統(tǒng)的故障診斷。
表4 10組故障數(shù)據(jù)的驗(yàn)證結(jié)果
選擇10組在同一檢查狀態(tài)下具有不同健康狀態(tài)的導(dǎo)彈控制系統(tǒng)測試數(shù)據(jù),對基于SOM網(wǎng)絡(luò)的健康狀態(tài)評估模型的有效性進(jìn)行驗(yàn)證,其中包括1組正常數(shù)據(jù)、7組退化數(shù)據(jù),以及2組故障數(shù)據(jù)。SOM網(wǎng)絡(luò)的輸出結(jié)果和健康狀態(tài)評估結(jié)果如圖4和圖5所示。
圖4 SOM網(wǎng)絡(luò)的訓(xùn)練輸出結(jié)果Fig.4 Output results of the training of SOM network
圖5 SOM網(wǎng)絡(luò)的輸出結(jié)果Fig.5 Output results of SOM network
圖4中:16個(gè)方格代表競爭層4×4的神經(jīng)元分布,不同的顏色代表不同的狀態(tài)類別,數(shù)字代表樣本的數(shù)量;左上角灰色的兩個(gè)帶數(shù)字方格代表正常類別,其余6個(gè)帶數(shù)字方格代表6個(gè)故障類別。若這16個(gè)神經(jīng)元按照從左到右、從上到下的順序進(jìn)行排列,則正常類別和6個(gè)故障類別的SOM網(wǎng)絡(luò)輸出分別為
正常類別1:[1,0,0,0;0,0,0,0;0,0,0,0;0,0,0,0];
正常類別2:[0,0,0,0;1,0,0,0;0,0,0,0;0,0,0,0];
故障類別1:[0,0,0,1;0,0,0,0;0,0,0,0;0,0,0,0];
故障類別2:[0,0,0,0;0,0,1,0;0,0,0,0;0,0,0,0];
故障類別3:[0,0,0,0;0,0,0,0;0,1,0,0;0,0,0,0];
故障類別4:[0,0,0,0;0,0,0,0;0,0,0,1;0,0,0,0];
故障類別5:[0,0,0,0;0,0,0,0;0,0,0,0;1,0,0,0];
故障類別6:[0,0,0,0;0,0,0,0;0,0,0,0;0,0,1,0]。
圖5是將10組測試數(shù)據(jù)代入SOM網(wǎng)絡(luò)的輸出結(jié)果,其中每個(gè)方格數(shù)據(jù)代表每個(gè)神經(jīng)元的輸出結(jié)果,顏色的深淺代表輸出數(shù)值的大小。
由于在SOM網(wǎng)絡(luò)中包括6個(gè)故障類別,根據(jù)(6)式,將針對每組測試數(shù)據(jù)分別計(jì)算6個(gè)健康度,每組測試數(shù)據(jù)的健康度為6個(gè)健康度計(jì)算結(jié)果的最小值。SOM網(wǎng)絡(luò)的健康狀態(tài)評估結(jié)果如表5所示。由表5可以看出,本文基于SOM網(wǎng)絡(luò)的健康狀態(tài)評估模型能夠準(zhǔn)確有效地對導(dǎo)彈控制系統(tǒng)的健康狀態(tài)進(jìn)行評估。
表5 10組數(shù)據(jù)的驗(yàn)證結(jié)果
5 結(jié)論
本文提出基于RBF網(wǎng)絡(luò)的自適應(yīng)故障觀測器和基于SOM網(wǎng)絡(luò)的健康狀態(tài)評估模型,分別用于控制系統(tǒng)的故障檢測和健康狀態(tài)評估,通過某型導(dǎo)彈的控制系統(tǒng)案例驗(yàn)證了該方法的有效性。得出主要結(jié)論如下:
1)殘差生成RBF網(wǎng)絡(luò)能夠?qū)刂葡到y(tǒng)的輸出值進(jìn)行估計(jì),最終得到實(shí)際輸出值和估計(jì)輸出值的殘差。
2)自適應(yīng)閾值RBF網(wǎng)絡(luò)能夠生成隨系統(tǒng)狀態(tài)或者輸入指令變化的姿勢與故障判別閾值,排除因非故障原因引起的誤差。
3)SOM網(wǎng)絡(luò)能夠?qū)刂葡到y(tǒng)的健康狀態(tài)和故障狀態(tài)進(jìn)行聚類分析,并建立基于健康狀態(tài)和故障狀態(tài)監(jiān)測數(shù)據(jù)的健康度計(jì)算模型。
本文研究對象主要是導(dǎo)彈的控制系統(tǒng)。在未來的研究中,將進(jìn)一步對導(dǎo)彈其他單機(jī)以及整彈的健康狀態(tài)評估問題進(jìn)行研究。
猜你喜歡
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
鐵道通信信號(hào)(2016年4期)2016-06-01 12:10:19
電測與儀表(2016年5期)2016-04-22 01:13:50
汽車維修與保養(yǎng)(2015年12期)2015-04-18 07:51:49
汽車維修與保養(yǎng)(2015年8期)2015-04-17 03:32:52
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維修與保養(yǎng)(2015年7期)2015-04-17 02:12:40
汽車維修與保養(yǎng)(2015年2期)2015-04-17 01:30:34
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39