形位誤差對三大件式轉向架曲線通過性能影響分析*
2022-05-14 06:08:24隋順琦高賢波
鐵道機車車輛 2022年2期
關鍵詞:轉向架
王 萌,隋順琦,高賢波,凌 亮
(1 神華鐵路裝備有限責任公司,北京 100120;2 西南交通大學 牽引動力國家重點實驗室,成都 610031)
三大件轉向架通過交叉支撐裝置側架彈性固定,使轉向架保持正位狀態。在車輛實際運用過程中側架導框的中心會發生偏轉進而導致輪對的定位中心偏差,這種偏差稱為形位誤差。目前,關于形位誤差對三大件轉向架曲線通過性能影響的研究相對較少。文獻[1]研究了獨立輪對安裝偏差對輪緣磨耗及輪軌橫向力的影響規律。文獻[2]基于現場試驗研究表明車軸不平行度對車輛運行阻力及車輪磨耗的影響。池茂儒[1-2]研究了形位誤差狀態下轉向架的運動狀態和受力以及形位誤差對行車安全性、穩定性的影響,并根據輪對偏角對穩定性的影響將其劃分為易穩定區、欠穩定區和亞穩定區。沈鋼[3-4]分析了直線線路條件下形位誤差對三大件轉向架運行特性的影響,提出了正位偏差的測量方法。王衛東[5]分析了鐵道車輛轉向架裝配誤差對鐵道車輛運行穩定性、平穩性和輪軌動作用力的影響。丁軍君[6]分析了初始安裝偏轉角、輪徑差對車輪磨耗的影響。文獻[7]研究軸距誤差對車輛動力學性能的影響,并指出廣深線試驗中轉臂式軸箱定位方式導致輪對偏磨。文中采用某型貨車進行動力學計算,分析不同形位誤差對三大件轉向架曲線通過性能的影響。
1 形位誤差常見形式
車輛實際運營過程中,形位誤差的表現形式雖然各不相同,如圖1所示,但基本都可由圖1的4種典型形式組合得到。圖1(a)~(d)依次為:前輪對偏轉、后輪對偏轉、前后輪對同向偏轉、前后輪對反向偏轉。
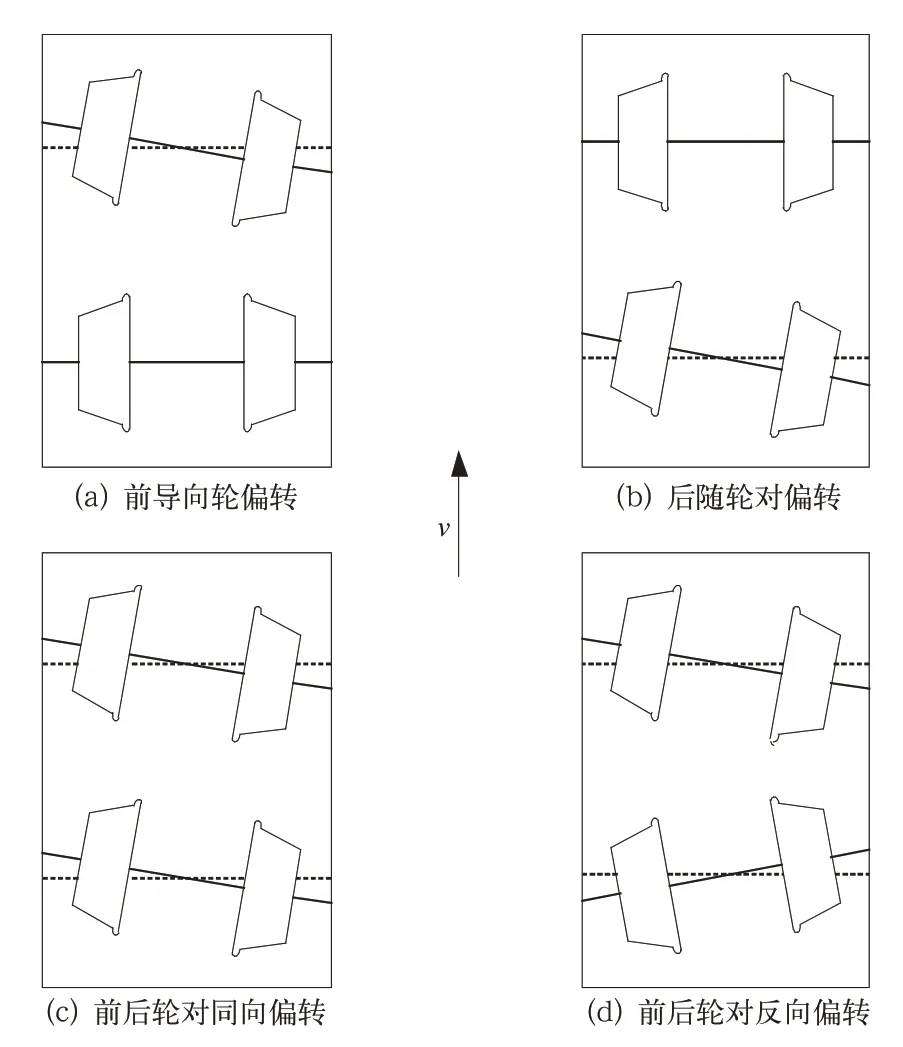
圖1 形位誤差種類
2 仿真分析
2.1 車輛動力學模型
基于SIMPACK多體動力學軟件建立某型貨車動力學模型,如圖2所示。車輛及線路設置見表1,車輪踏面為LM型踏面,軌道為60 kg/m鋼軌,線路為400 m半徑曲線,為分析形位誤差對車輛曲線通過性能影響,線路未施加不平順。車輛前轉向架設置形位誤差,計算不同形位誤差下車輛以不同的速度惰行通過曲線,分析前轉向架曲線通過性能指標最大值隨速度、形位誤差動態演變特性。
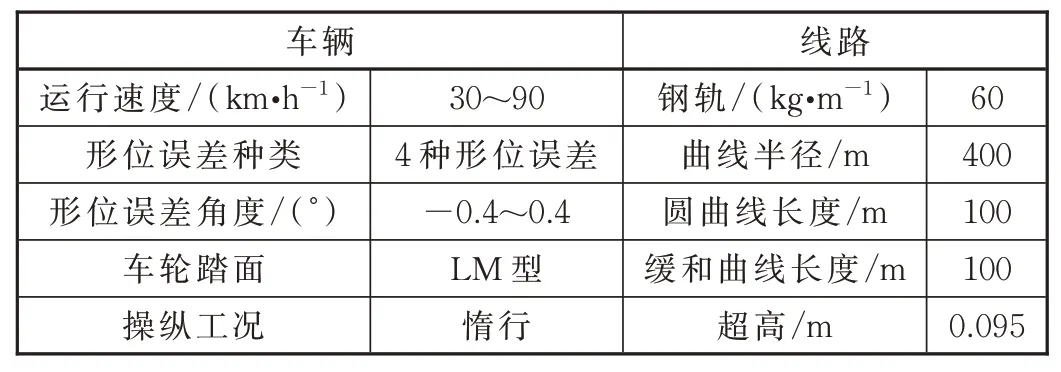
表1 車輛及線路設置
圖2 貨車動力學模型
2.2 仿真結果分析
2.2.1形位誤差與線路方向相對關系
為分析曲線線路條件下線路方向與形位誤差偏轉方向相對關系對車輛動力學性能影響,以前輪對偏轉為例,計算對稱工況條件下車輛動力響應,工況設置見表2。

表2 工況設置
對稱工況下一位輪對輪軌垂向力、橫向力時程曲線如圖3、圖4所示,對比可知,對稱條件下2種工況的輪軌力完全一致。轉向架前輪對偏轉0.3°通過右曲線時,右輪輪軌力與前輪對偏轉-0.3°通過左曲線時的左輪輪軌力一致,左輪反之。因此對稱條件下可視為同一工況,后續計算中以右曲線為例。
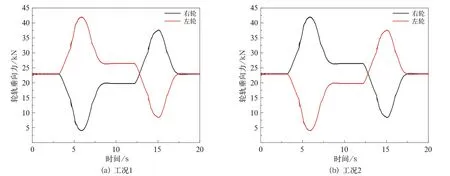
圖3 輪軌垂向力
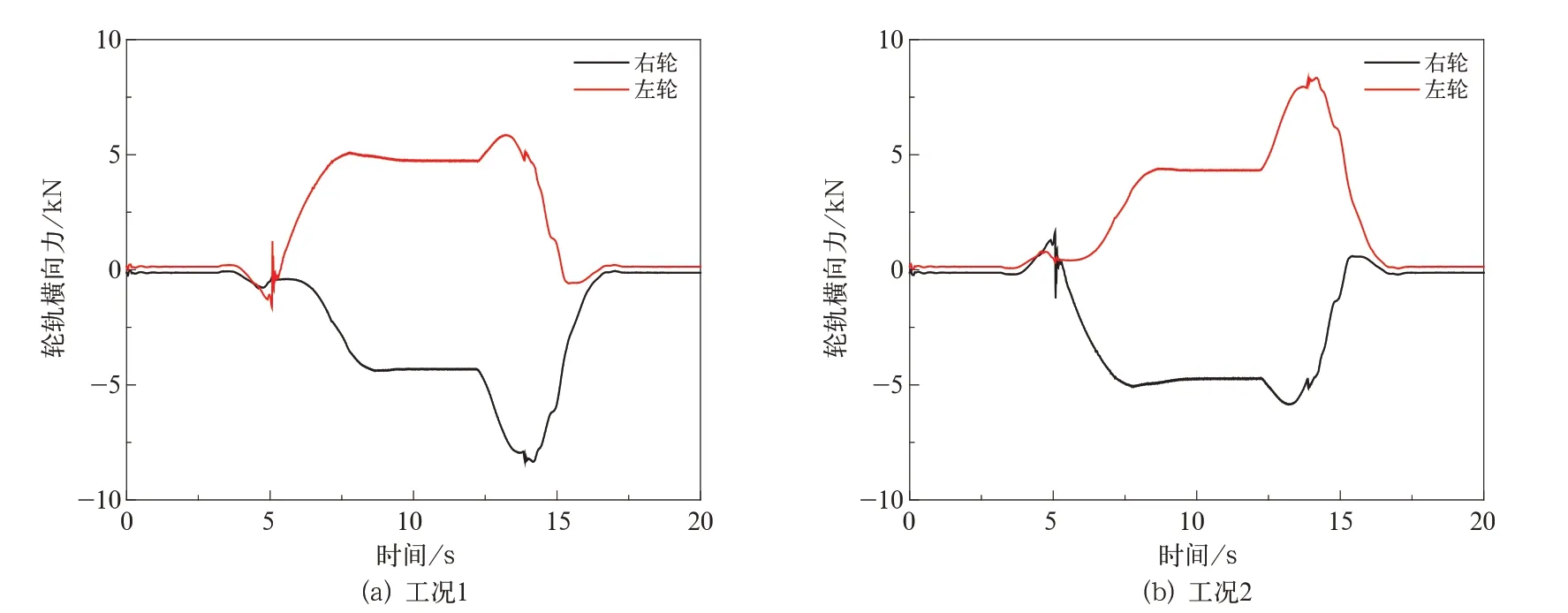
圖4 輪軌橫向力
2.2.2形位誤差對曲線通過性能影響
(1)前輪對偏轉
對于前輪對偏轉形位誤差,一位輪對偏轉由-0.4°~0.4°。形位誤差為負表示一位輪對逆時針偏轉,形位誤差為正表示一位輪對順時針偏轉。
前輪對偏轉狀態下,曲線通過性能指標隨速度、偏角變化如圖5所示。由圖5可知,脫軌系數、輪軌橫向力隨速度變化相對較小;一位輪對順時針偏轉0.1°時脫軌系數、輪重減載率、輪軌橫向力3項指標達到最小,一位輪對順時針偏轉0°~0.1°范圍內輪軸橫向力達到最小,隨偏轉角進一步增大或減小4項指標均有不同程度增加。車輛運行速度超過70 km/h、前輪對偏轉達到0.2°,輪重減載率、輪軸橫向力分別隨速度和偏轉角的增大而顯著增加。
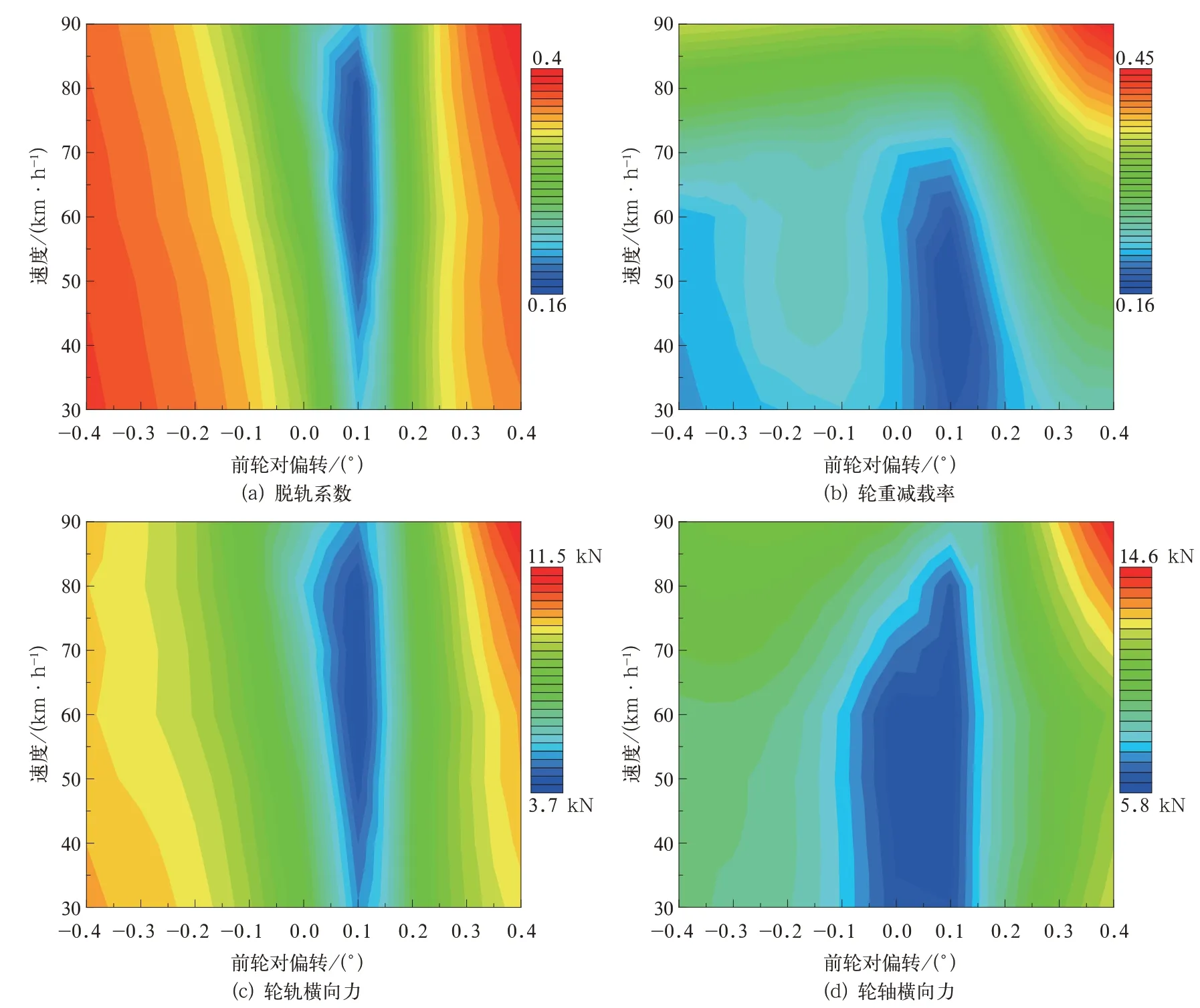
圖5 前輪對偏轉形位誤差對曲線通過性能指標影響
當三大件式轉向架存在前輪對偏轉形位誤差,一位輪對順時針偏轉0.1°通過右曲線時脫軌系數、輪重減載率、輪軌橫向力、輪軸橫向力更小,更有利于曲線通過。
(2)后輪對偏轉
對于后輪對偏轉形位誤差,二位輪對偏轉由-0.4°~0.4°。形位誤差為負表示二位輪對逆時針偏轉,形位誤差為正表示二位輪對順時針偏轉。
后輪對偏轉形位誤差下,曲線通過性能指標隨速度、形位誤差變化如圖6所示。由圖6可知,后輪對逆時針偏轉0.1°~0.2°(-0.1°~-0.2°)范圍內脫軌系數、輪軌橫向力相對較小且隨速度先減小后增大。后輪對順時針偏轉超過0.2°、運行速度達到60 km/h時,脫軌系數、輪軌橫向力分別隨速度、偏轉角的增大而顯著增加。后輪對逆時針偏轉時,輪重減載率變化相對較小;后輪對順時針偏轉0.3°時,輪軸橫向力達到最小。
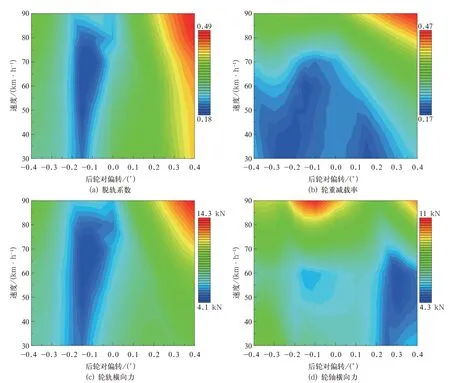
圖6 后輪對偏轉形位誤差對曲線通過性能指標影響
當三大件式轉向架存在后輪對偏轉形位誤差,二位輪對逆時針偏轉通過右曲線時脫軌系數、輪重減載率、輪軌橫向力更小,二位輪對順時針偏轉0.3°時,輪軸橫向力更小。
(3)前后輪對同向偏轉
對于前后輪對同向偏轉形位誤差,一、二位輪對偏轉由-0.4°~0.4°。形位誤差為負表示一、二位輪對逆時針偏轉;形位誤差為正表示一、二位輪對順時針偏轉。
前后輪對同向偏轉形位誤差下,曲線通過性能指標隨速度、形位誤差變化如圖7所示。由圖7可知,前后輪對逆時針偏轉0.15°至順時針偏轉0.3°(-0.15°~0.3°)范 圍 內 脫 軌 系 數、輪 軌 橫 向 力相對較小且隨速度增大先減小后增大。前后輪對順時針偏轉0.1°~0.2°范圍內輪重減載率、輪軸橫向力相對較小。前后輪對逆時針偏轉超過0.15°、運行速度達到60 km/h時,脫軌系數、輪軌橫向力、輪軸橫向力分別隨速度、偏轉角的增大而顯著增加。
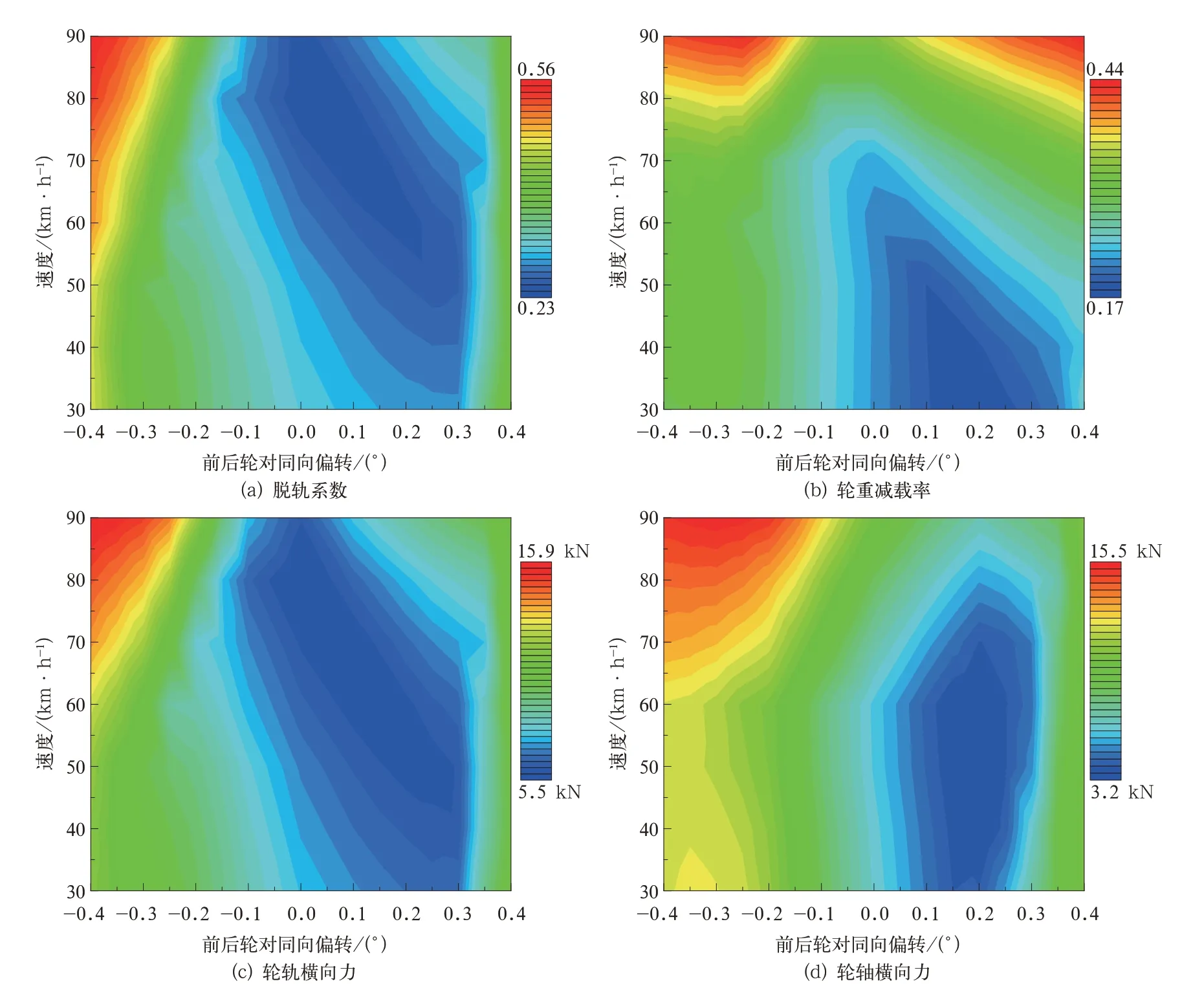
圖7 前后輪對同向偏轉形位誤差對曲線通過性能指標影響
當三大件式轉向架存在前后輪對同向偏轉形位誤差,前后輪對順時針偏轉通過右曲線時,脫軌系數、輪軌橫向力、輪重減載率、輪軸橫向力相對更小,更有利于曲線通過。
(4)前后輪對反向偏轉
對于前后輪對反向偏轉形位誤差,一、二位輪對偏轉由-0.4°~0.4°。形位誤差為負表示一位輪對逆時針偏轉、二位輪對順時針偏轉;形位誤差為正表示一位輪對順時針偏轉、二位輪對逆時針偏轉。
前后輪對反向偏轉形位誤差下,曲線通過性能指標隨速度、形位誤差變化如圖8所示。由圖8可知,前后輪對反向偏轉0°~0.1°范圍內脫軌系數、輪軌橫向力相對較小,隨偏轉角增大而增大。前后輪對反向偏轉-0.1°~0.1°范圍內輪重減載率相對較小。一位輪對逆時針偏轉、二位輪對順時針偏轉(即前后輪對反向偏轉角小于0)狀態下通過曲線時輪重減載率對速度、偏轉角變化更敏感。一位輪對逆時針偏轉、二位輪對順時針偏轉時,輪軸橫向力相對較小,前后輪對反向偏轉角-0.25°通過曲線時,輪軸橫向力達到最小。
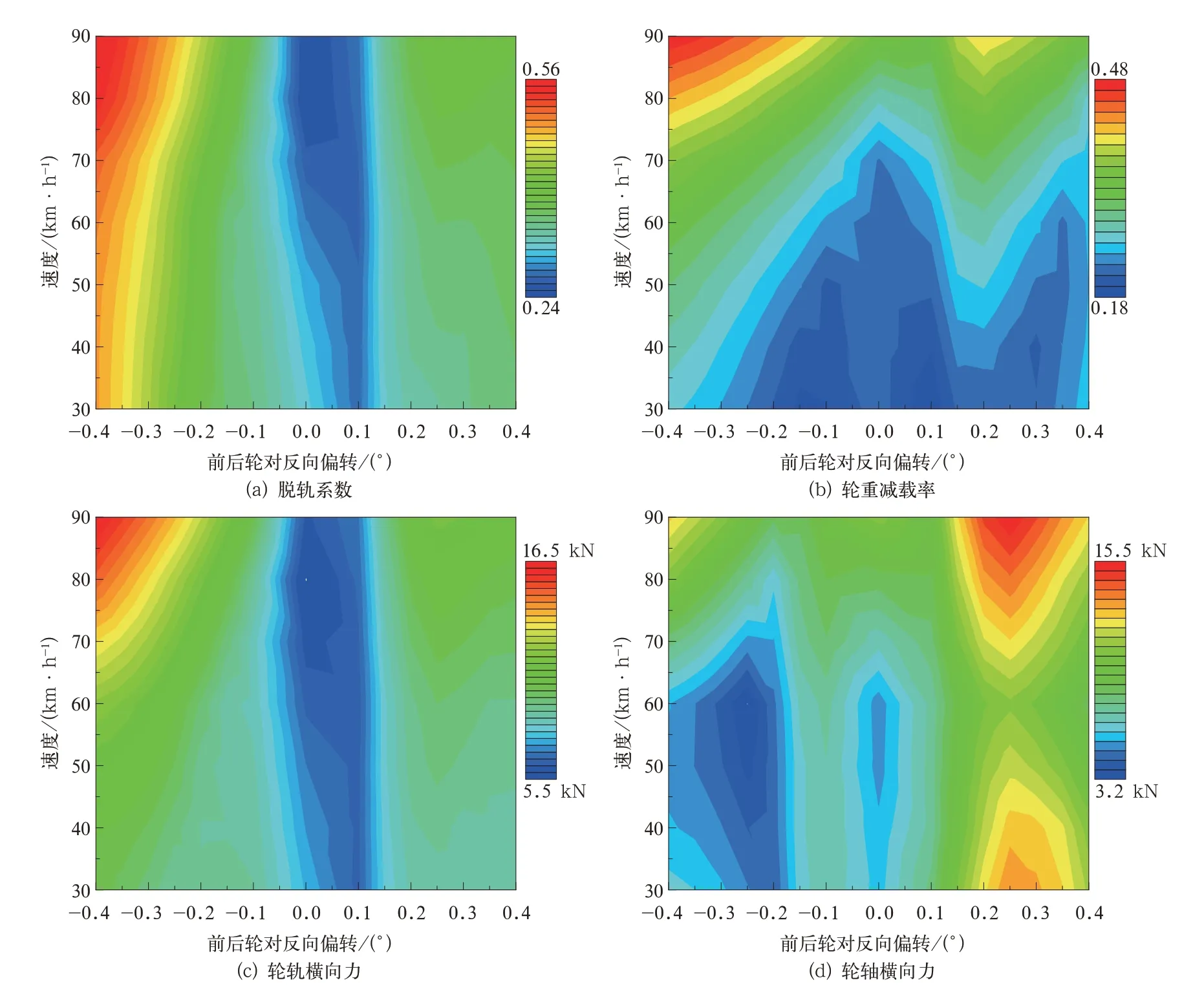
圖8 前后輪對反向偏轉形位誤差對曲線通過性能指標影響
當三大件式轉向架存在前后輪對反向偏轉形位誤差,前后輪對反向偏轉0°~0.1°范圍內脫軌系數、輪軌橫向力相對較小;一位輪對順時針偏轉、二位輪對逆時針偏轉通過右曲線時,輪重減載率相對更小;一位輪對逆時針偏轉、二位輪對順時針偏轉通過右曲線時,輪軸橫向力相對更小。
3 結論
文中分析了不同種類形位誤差的分布方式對三大件式轉向架動態曲線通過的影響規律。主要結論如下:
(1)形位誤差分布方式對三大件式轉向架曲線通過性能有較大影響,不同種類形位誤差對動態曲線通過的影響規律有所不同。
(2)對于前輪對偏轉形位誤差,一位輪對順時針偏轉0.1°通過右曲線時,脫軌系數、輪重減載率、輪軌橫向力、輪軸橫向力更小,更有利于曲線通過。
(3)對于后輪對偏轉形位誤差,二位輪對逆時針偏轉通過右曲線時,脫軌系數、輪重減載率、輪軌橫向力更小,二位輪對順時針偏轉0.3°時,輪軸橫向力更小。
(4)對于前后輪對同向偏轉形位誤差,前后輪對順時針偏轉通過右曲線時,脫軌系數、輪軌橫向力、輪重減載率、輪軸橫向力相對更小,更有利于曲線通過。
(5)對于前后輪對反向偏轉形位誤差,前后輪對反向偏轉0°~0.1°范圍內脫軌系數、輪軌橫向力相對較小;一位輪對順時針偏轉、二位輪對逆時針偏轉通過右曲線時,輪重減載率相對更小,一位輪對逆時針偏轉、二位輪對順時針偏轉通過右曲線時,輪軸橫向力相對更小。
猜你喜歡
湖南大學學報·自然科學版(2025年6期)2025-07-16 00:00:00
裝備制造技術(2021年5期)2021-08-14 01:44:56
裝備制造技術(2021年2期)2021-07-21 05:38:24
哈爾濱鐵道科技(2020年4期)2020-07-22 02:22:28
制造技術與機床(2019年12期)2020-01-06 03:17:46
經濟技術協作信息(2018年18期)2019-01-23 07:17:20
西南交通大學學報(2018年5期)2018-11-08 10:58:26
現代城市軌道交通(2018年5期)2018-05-28 02:19:35
現代工業經濟和信息化(2016年1期)2016-05-17 05:33:38
鐵道運營技術(2015年3期)2015-12-23 09:27:14