基于MEEMD-SDP圖像特征和DRN的行星齒輪箱故障診斷*
2022-05-24 00:54:04陳友廣謝鯤鵬
機(jī)電工程 2022年5期
陳友廣,陳 云,謝鯤鵬
(1.蘇州健雄職業(yè)技術(shù)學(xué)院,江蘇 蘇州 215411;2.重慶大學(xué) 機(jī)械傳動國家重點(diǎn)實驗室,重慶 400030;3.重慶華數(shù)機(jī)器人有限公司,重慶 400714)
0 引 言
因其運(yùn)行穩(wěn)定性好、體積小、承載能力強(qiáng)及傳動效率高等優(yōu)點(diǎn),行星齒輪箱在航空航天領(lǐng)域、風(fēng)力發(fā)電等領(lǐng)域得到了廣泛的應(yīng)用[1]。
但是,由于其所處環(huán)境差,常受到動態(tài)交變載荷的作用,其包含的關(guān)鍵部件之一的齒輪,常常會出現(xiàn)輪齒斷裂、裂紋、磨損等故障,輕則導(dǎo)致機(jī)械設(shè)備停機(jī)維修,帶來重大經(jīng)濟(jì)損失,重則可能會造成人員傷亡[2]。因此,急需對行星齒輪箱智能故障診斷方法展開研究。
在實際工程中,由于行星齒輪箱轉(zhuǎn)速、負(fù)載不穩(wěn)定及出現(xiàn)故障時,會產(chǎn)生沖擊,齒輪振動信號具有非平穩(wěn)的特性[3]。
如何從齒輪振動信號中提取有效故障特征一直是很多專家學(xué)者研究的重點(diǎn)。采用經(jīng)驗?zāi)B(tài)分解(empirical mode decomposition, EMD)[4]方法可以有效提取齒輪故障特征,但EMD存在端點(diǎn)效應(yīng)和模態(tài)混淆等不足。WU Zhao-hua等人[5]提出了一種集總經(jīng)驗?zāi)B(tài)分解(ensemble empirical mode decomposition, EEMD)方法,但采用該方法所得到的結(jié)果存在非標(biāo)準(zhǔn)IMF分量、信號完備性差等問題。
基于上述原因,鄭旭等人[6]提出了一種改進(jìn)的集總平均經(jīng)驗?zāi)B(tài)分解(modified ensemble empirical mode decomposition,MEEMD)方法,克服了EMD和EEMD具有的缺陷,采用MEEMD方法分解的效果較好。
近年來,雖然基于上述的信號特征提取方法所獲得的特征能夠反映齒輪的運(yùn)行狀態(tài),但是對最終的故障分類效果不佳。因此,研究人員考慮通過圖像處理方式來提取齒輪特征信息。
采用對稱點(diǎn)圖案(symmetrized dot pattern, SDP)[7]方法能夠?qū)崿F(xiàn)一維時間序列到極坐標(biāo)系下的二維對稱雪花圖的轉(zhuǎn)換,獲得的雪花花瓣形狀特征更加準(zhǔn)確、直觀。在故障模式識別方面,深度殘差網(wǎng)絡(luò)(deep residual network,DRN)[8]通過在CNN卷積層中添加殘差學(xué)習(xí)單元,緩解和解決了網(wǎng)絡(luò)訓(xùn)練及卷積網(wǎng)絡(luò)過擬合問題,使得網(wǎng)絡(luò)的層數(shù)更深,特征抽象化過程更有效,增強(qiáng)了網(wǎng)絡(luò)從原始信息中自主獲取特征的能力,在機(jī)械故障模式識別中取得了較好的效果。
基于上述分析,筆者提出一種將MEEMD-SDP圖像特征和DRN相結(jié)合的行星齒輪箱智能故障診斷新方法。首先,利用MEEMD分解齒輪振動信號;然后,通過SDP方法提取分解所得的IMF分量,變換到極坐標(biāo)下的雪花圖特征,組成特征向量;最后,采用深度殘差網(wǎng)絡(luò)(DRN)模型實現(xiàn)齒輪5種不同狀態(tài)的識別與分類。
1 MEEMD算法原理
改進(jìn)的集總平均經(jīng)驗?zāi)B(tài)分解(MEEMD)有效解決了模態(tài)混疊、偽分解殘余分量等問題,提高了信號分解完備性。
MEEMD的分解過程如下[9]:
(1)信號s(t)添加白噪聲ni(t)和-ni(t),即:
(1)

(2)
(3)

(4)
(4)EMD分解cj(t),以第1階分量c1(t)為例,即:
(5)
(6)
式中:ek(t)—第k階標(biāo)準(zhǔn)IMF分量;qk(t)—?dú)堄唷?/p>
MEEMD分解過程可簡化為:
(7)
2 SDP分析法原理
接下來,筆者通過對稱點(diǎn)圖案(SDP)分解方法提取IMF分量,將其變換到極坐標(biāo)下的雪花圖像特征,并組成特征向量。
在信號x(t)中,設(shè)xn是時刻n的幅值,采用SDP分析法將其變換到極坐標(biāo)空間S(r(n),θ(n),φ(n))中的點(diǎn)。
SDP分析法的基本原理[10]如圖1所示。
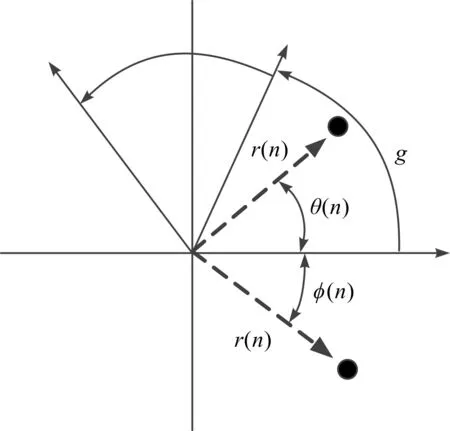
圖1 SDP分析法基本原理圖r(n)—極坐標(biāo)半徑;θ(n),φ(n)—其沿逆時針和順時針旋轉(zhuǎn)的角度
r(n)、θ(n)、φ(n)的計算公式為:
(8)
式中:xmax,xmin—x(t)的最大、最小幅值。
(9)
式中:l—時間間隔參數(shù);θ—鏡像對稱平面旋轉(zhuǎn)角度;g—放大因子。
(10)
在SDP分析法中,θ、g、l的選取至關(guān)重要。當(dāng)θ=60°時,鏡像對稱平面0°、60°、120°、180°、240°、300°共同組成了雪花狀的六邊形,此時圖像特征清晰、直觀。
通過已有的研究成果[11],一般取g<θ,l∈[1,10]最佳。
3 深度殘差網(wǎng)絡(luò)
此處,筆者引入深度殘差網(wǎng)絡(luò)(DRN)模型,以實現(xiàn)對行星齒輪箱齒輪不同故障的識別與分類。
深度殘差網(wǎng)絡(luò)(DRN)是為解決卷積神經(jīng)網(wǎng)絡(luò)(CNN)因卷積層增加導(dǎo)致性能退化所提出的一種深度學(xué)習(xí)框架,其通過在卷積層中增加殘差學(xué)習(xí)單元來解決深層網(wǎng)絡(luò)結(jié)構(gòu)的梯度消失問題,使網(wǎng)絡(luò)運(yùn)行更順暢[12]。
深度殘差網(wǎng)絡(luò)包括輸入層、卷積層、BN層、激活層、殘差學(xué)習(xí)單元、池化層、全連接層和輸出層。
卷積層利用多個不同的卷積核提取輸入圖像的主要特征;
Relu為激活函數(shù),可以避免網(wǎng)絡(luò)模型收斂困難的問題[13];
殘差學(xué)習(xí)單元通過在卷積層間加入跳入連接,使模型參數(shù)更易被優(yōu)化,學(xué)習(xí)效果更佳。
殘差學(xué)習(xí)單元包括2個卷積層和1個跳躍連接,如圖2所示。
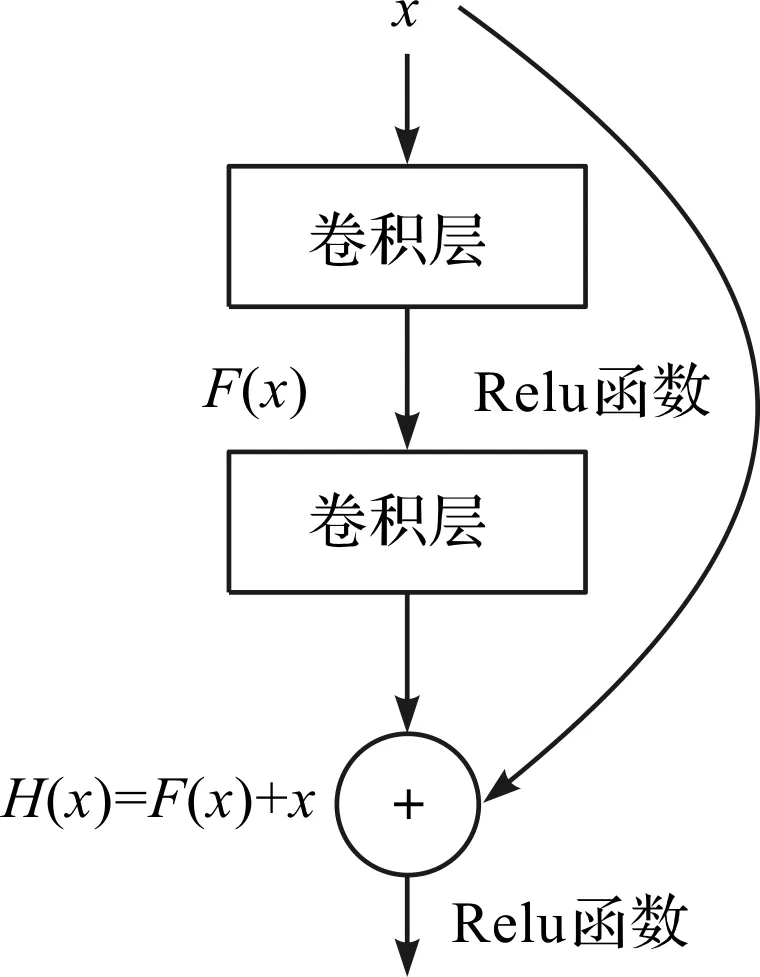
圖2 殘差學(xué)習(xí)單元x—輸入;F(x)—卷積分支的輸出;H(x)—整個結(jié)構(gòu)的輸出
池化層對每個特征映射圖進(jìn)行壓縮,得到新的特征圖[14]。
4 實驗與結(jié)果分析
4.1 實驗設(shè)置
為了驗證所提方法的有效性,筆者基于東南大學(xué)公開的齒輪箱數(shù)據(jù)集進(jìn)行了齒輪箱故障診斷實驗,并將所得到的結(jié)果與采用傳統(tǒng)的卷積神經(jīng)網(wǎng)絡(luò)(CNN)所得結(jié)果進(jìn)行了對比。
齒輪箱[15,16]數(shù)據(jù)集從傳動系統(tǒng)動力學(xué)模擬器(DDS)中收集,轉(zhuǎn)速-系統(tǒng)負(fù)荷設(shè)置為20 HZ-0V,每種狀態(tài)下采集樣本1 000組,每組樣本長度為1 024,4種故障狀態(tài)連同正常狀態(tài)(5種不同狀態(tài))共采集5 000組樣本。
為了提高模型的可靠性,樣本按照7 ∶3的比例分為訓(xùn)練集和測試集。訓(xùn)練集用于訓(xùn)練網(wǎng)絡(luò)模型并通過不斷調(diào)整相關(guān)參數(shù)最終確定模型最優(yōu)參數(shù),進(jìn)而得到較優(yōu)的訓(xùn)練模型;測試集用于檢測訓(xùn)練模型的故障診斷效果。
齒輪5種不同狀態(tài)數(shù)據(jù)集信息及樣本數(shù)詳細(xì)說明,如表1所示。

表1 齒輪5種狀態(tài)數(shù)據(jù)集樣本
4.2 特征提取
筆者采用MEEMD方法分解齒輪5種狀態(tài)下的振動加速度信號。
限于篇幅,此處筆者僅給出齒輪切齒狀態(tài)下某一樣本MEEMD分解后的IMF分量結(jié)果,如圖3所示。
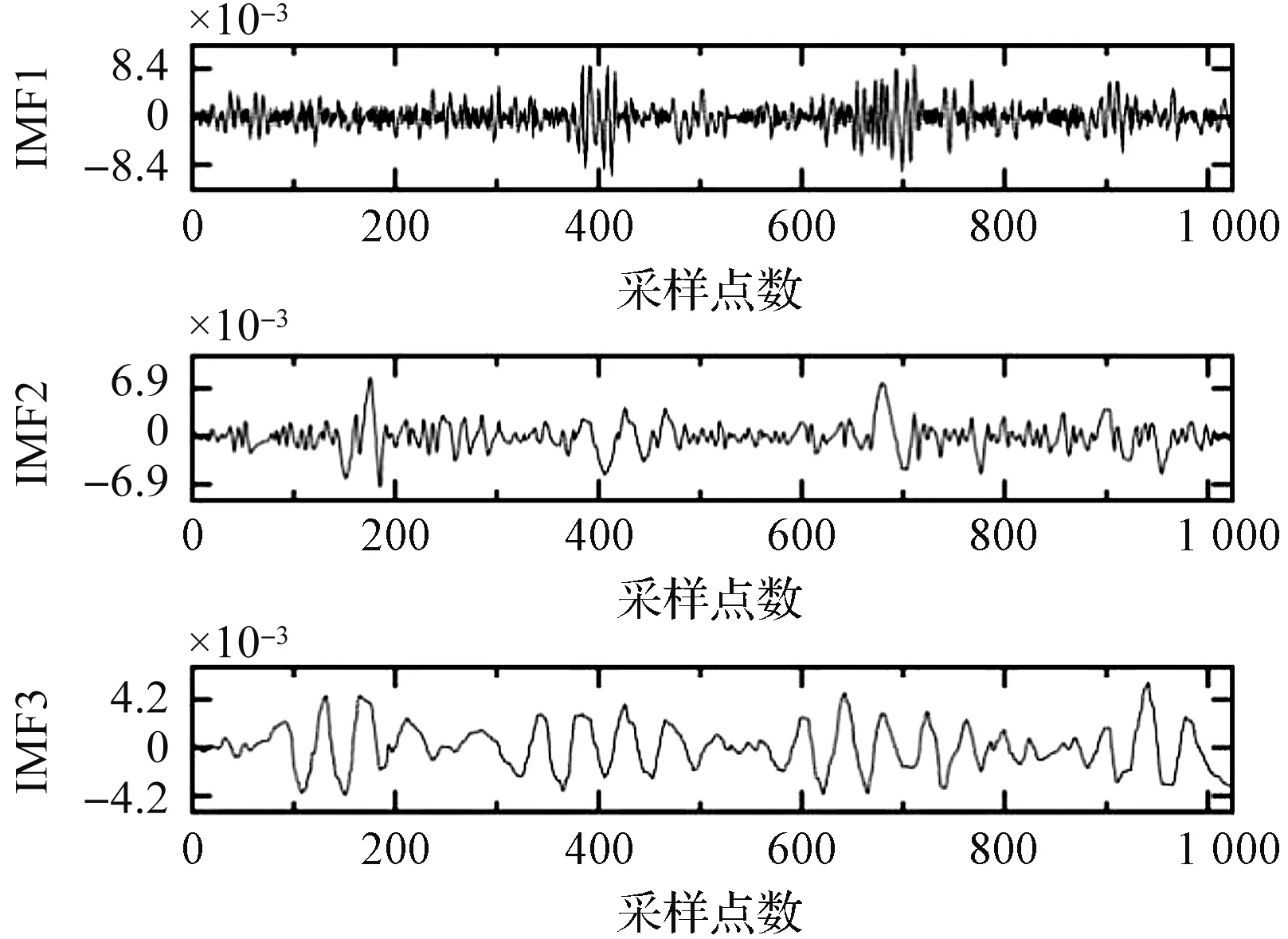
圖3 MEEMD分解信號圖
筆者采用SDP分析方法,分解表1中齒輪正常狀態(tài)和4種故障狀態(tài)下所采集的振動信號MEEMD,分別獲得6個IMF分量進(jìn)行變換,并獲得SDP極坐標(biāo)圖像,將原始振動信號的特征較好地表達(dá)出來。
參數(shù)g和l的取值應(yīng)用圖像相關(guān)分析方法,筆者通過反復(fù)實驗,最終選取g=20°、l=10時為最佳參數(shù)。
齒輪5種狀態(tài)的SDP圖像如圖4所示。
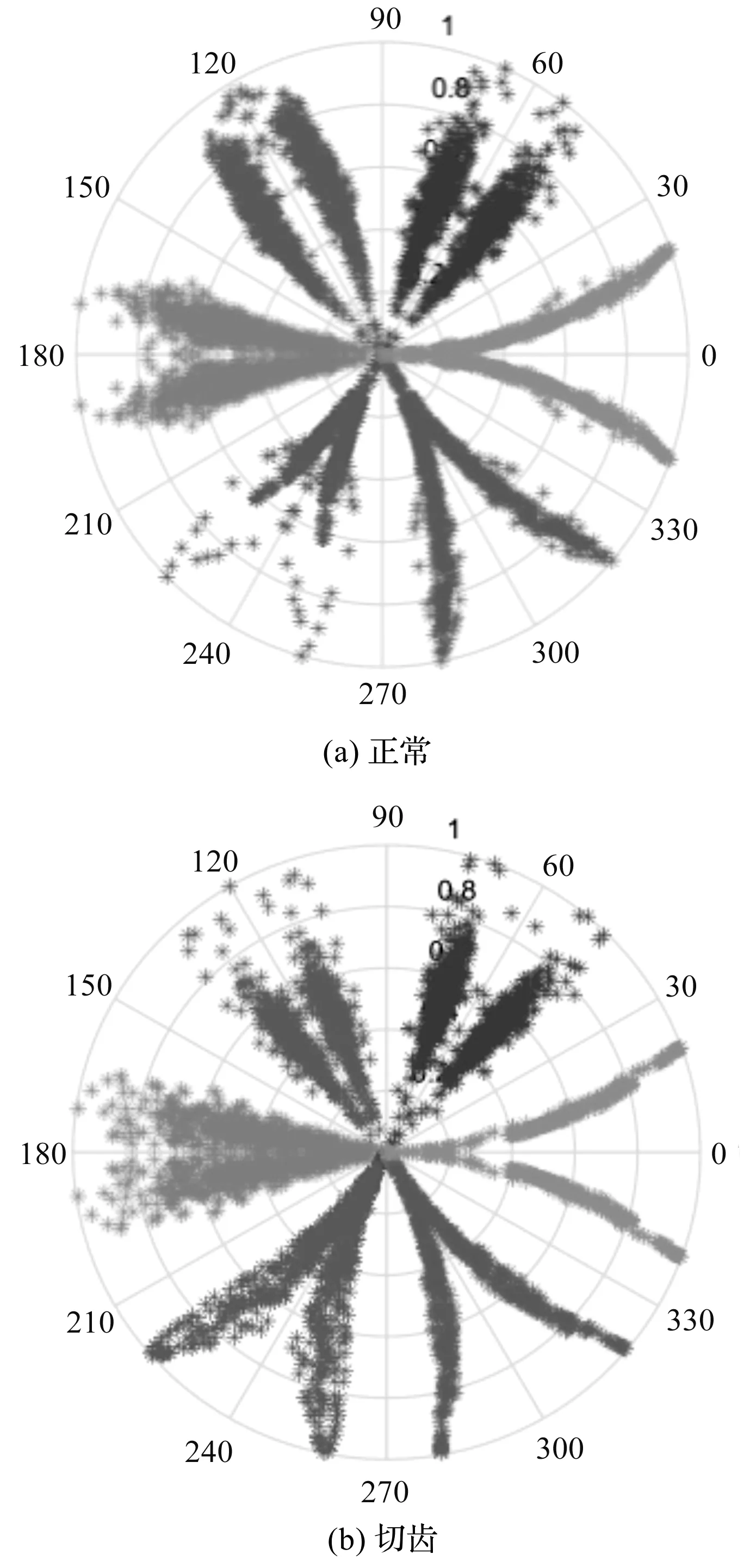
圖4 齒輪5種狀態(tài)的SDP圖像
4.3 齒輪DRN故障診斷模型建立
接下來,筆者建立齒輪DRN故障診斷模型。筆者研究的深度殘差網(wǎng)絡(luò)模型(DRN)包括17個卷積層、2個池化層和2個全連接層。
DSCNN模型結(jié)構(gòu)圖如圖5所示。
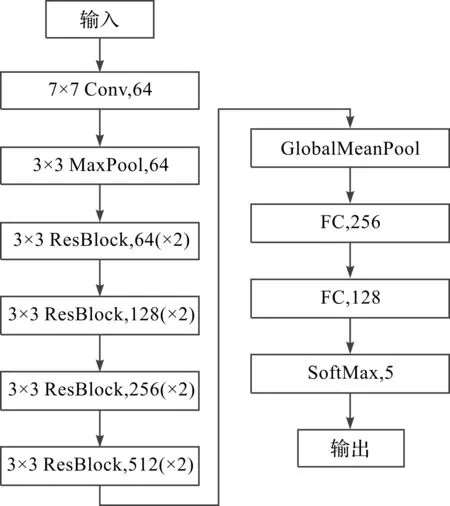
圖5 DSCNN模型結(jié)構(gòu)圖
模型的輸入為224×224的雪花圖,輸出大小格式為H×W×C,H為圖像高度,W為圖像寬度,C為圖像通道數(shù)。
DRN模型采用Keras深度學(xué)習(xí)框架編寫代碼,損失函數(shù)是交叉熵分類,訓(xùn)練與測試的圖片批次數(shù)量為32,優(yōu)化器選用Adam,學(xué)習(xí)率為0.001。
模型結(jié)構(gòu)參數(shù)如表2所示。
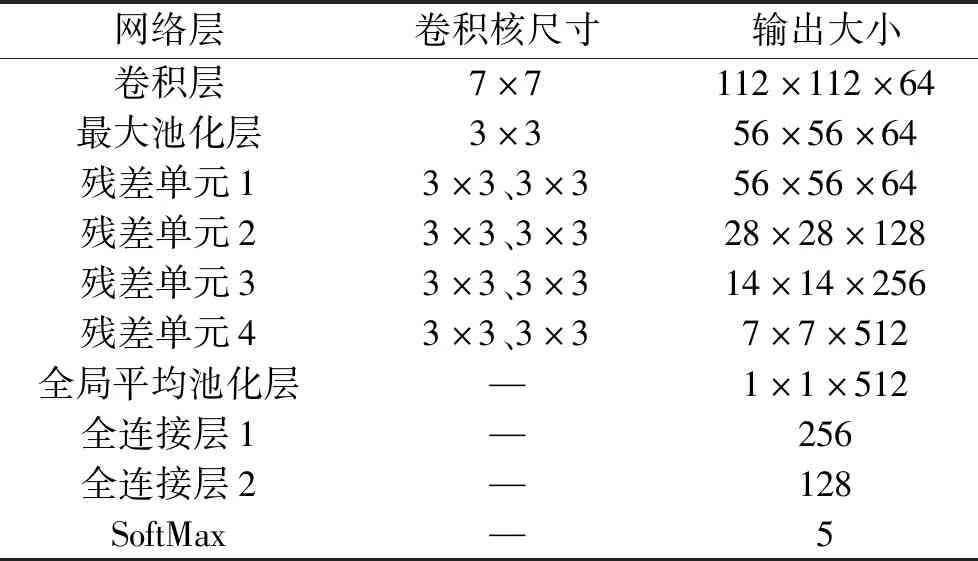
表2 深度殘差網(wǎng)絡(luò)結(jié)構(gòu)參數(shù)
4.4 診斷結(jié)果
為了體現(xiàn)模型的故障診斷能力,筆者將采用深度殘差網(wǎng)絡(luò)模型所得結(jié)果與采用傳統(tǒng)CNN模型[17]所得結(jié)果進(jìn)行對比。采用以上方法進(jìn)行診斷時,均使用相同的東南大學(xué)齒輪箱數(shù)據(jù)集。
在3 500組訓(xùn)練集上,所有模型訓(xùn)練時的損失值如圖6所示。
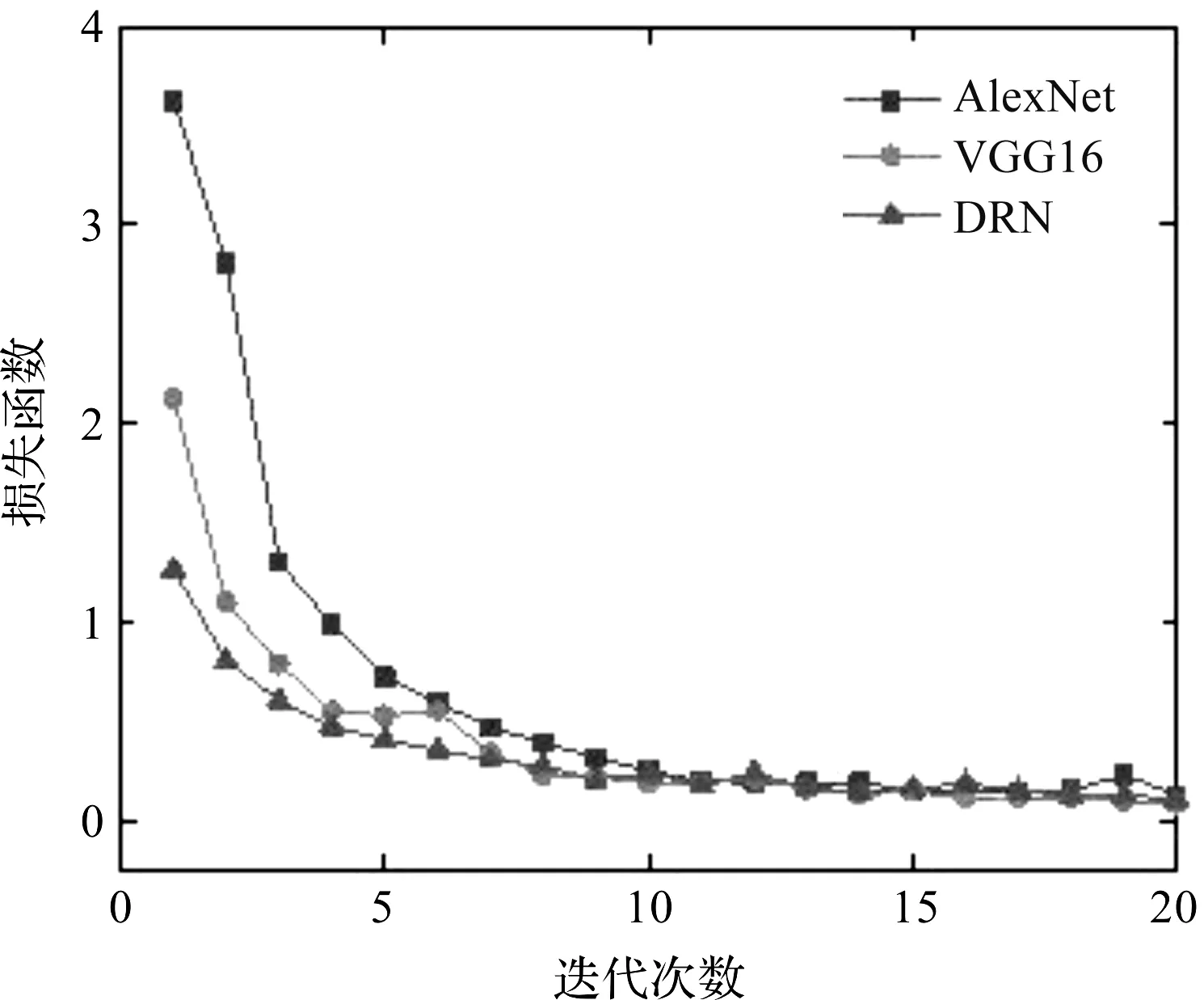
圖6 模型的損失函數(shù)
所有模型在3 500組訓(xùn)練集上訓(xùn)練時的準(zhǔn)確率結(jié)果分別如圖7所示。
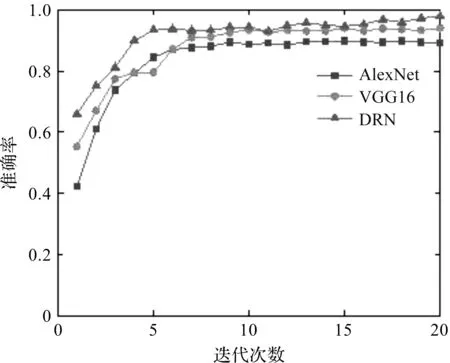
圖7 模型的準(zhǔn)確率曲線
根據(jù)圖(6,7)可以看出:在以上幾種對比方法中,采用DRN模型所獲得的收斂速度和診斷準(zhǔn)確率都是最佳的。
為了進(jìn)一步比較各模型對不同齒輪故障類型的診斷效果,在1 500組測試集上,筆者將DRN模型與對比試驗組模型分別進(jìn)行了10次實驗。
筆者獲得的不同模型實驗結(jié)果,即其平均診斷準(zhǔn)確率如表3所示。
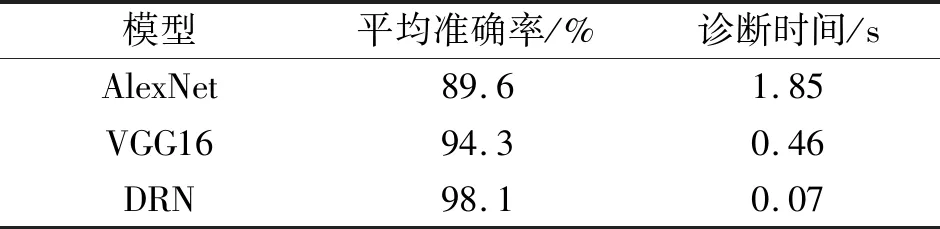
表3 不同模型實驗結(jié)果
根據(jù)表3可知:AlexNet、VGG16和DRN3種模型對齒輪不同故障類型均具有良好的診斷效果,而采用DRN模型所獲得的診斷效果是其中最好的。
5 結(jié)束語
針對行星齒輪箱非平穩(wěn)振動信號導(dǎo)致故障診斷準(zhǔn)確率低的問題,筆者提出了一種基于MEEMD-SDP圖像特征和DRN相結(jié)合的新故障診斷方法,并通過實驗對該故障診斷方法進(jìn)行了驗證,經(jīng)分析得出了以下結(jié)論:
(1)齒輪的振動信號作為行星齒輪箱故障識別的信號源,可通過MEEMD方法自適應(yīng)地對該信號進(jìn)行有效分解,得到包含較多故障信息的IMF分量;
(2)結(jié)合SDP分析方法得到極坐標(biāo)下雪花圖的特點(diǎn),將齒輪不同狀態(tài)的信號及各階IMF分量特征通過圖像方式準(zhǔn)確表征出來,為DRN模型的學(xué)習(xí)奠定良好基礎(chǔ);其具有運(yùn)算速度快、特征直觀等特點(diǎn);
(3)將DRN模型引入齒輪故障診斷,能夠有效地對齒輪進(jìn)行不同狀態(tài)的識別分類,與傳統(tǒng)的CNN模型(AlexNet、VGG16)相比,其平均識別準(zhǔn)確率分別提高了8.5%、3.8%,診斷時間也有一定縮短。
為了進(jìn)一步提高齒輪故障的識別率,在后續(xù)的研究中,筆者將對SPD圖像做進(jìn)一步預(yù)處理,使其特征更加明顯,再將所得結(jié)果輸入到所建立的DRN故障診斷模型中。
猜你喜歡
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學(xué)學(xué)報(自然科學(xué)版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
機(jī)械與電子(2014年1期)2014-02-28 02:07:31