一種改進的四旋翼飛行器自適應姿態融合算法
2022-05-24 11:43:48高怡李東航
電子設計工程 2022年10期
關鍵詞:融合
高怡,李東航
(西安石油大學電子工程學院,陜西 西安 710065)
四旋翼飛行器(quadrotor)具有體積小、機動性強、隱蔽性好、安全性高等優點,目前被廣泛應用于農業、軍事、新聞等領域[1]。姿態航向參考系統(AHRS)是一種基于微機電系統(MEMS)的高性能、低成本捷聯式慣性導航測量裝置[2],目前成為了四旋翼飛行器的主要慣性測量傳感器[3]。四旋翼飛行器姿態解算工作的速率與精度直接影響了其飛行的質量,所以設計出更加快速、精確的數據融合與姿態解算算法成為當前研究的熱點之一。
文獻[4]首次將梯度下降法(Gradient Descent,GD)應用在了飛行器姿態解算領域中。但為滿足四旋翼飛行器越來越高精度的姿態測量要求,不少學者又基于此算法提出了多種改進算法。文獻[5]將步長與飛行器的角速度關聯起來構成了動態步長。文獻[6]根據運動加速度值及加速度增量的變化得到自適應因子,從而提高了系統在運動狀態中的穩定性。文獻[7]將融合前的兩傳感器數據進行互補濾波,根據角速度和加速度大小自適應調整β參數,但該方法較為繁瑣,收斂速度較慢。文獻[8-9]引入動量以改進每次迭代的優化方向,提高了梯度下降收斂速度和精度,但精確的動量數據不易獲得。
該文以梯度下降法為基礎,提出一種變步長的自適應姿態融合算法——當設備在一段時間內的運動加速度數學期望值越大時,算法自適應地對加速度計的信任程度降低,即使梯度下降的補償成分降低,從而提高解算的精度。
1 飛行器姿態描述
1.1 坐標系與姿態角
選用地理坐標系東、北、天(O-ENU)作為參考坐標系(Reference Coordinate System),坐標原點位于載體重心。載體坐標系(Carrier Coordinate System)X軸為機體平面向右方向,與機體軸線垂直,Y軸為機頭所對正前方方向,Z軸垂直于XOY平面向上,構成坐標系O-XYZ。載體坐標系與地理坐標系如圖1 所示,機體繞X軸旋轉產生俯仰角(Pitch),繞Y軸旋轉產生滾轉角(Roll),繞Z軸旋轉產生偏航角(Yaw),分別用歐拉角θ、φ、ψ表示[10]。
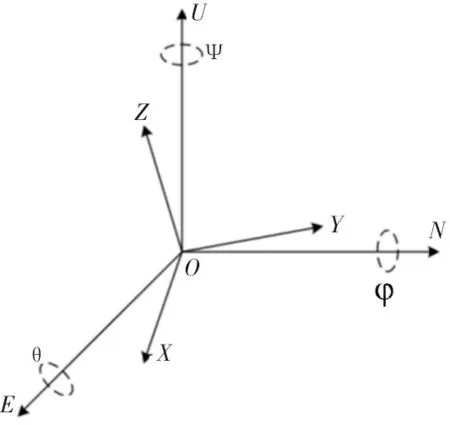
圖1 載體坐標系與地理坐標系
1.2 四元數法姿態求解
四元數最早于19 世紀被提出,并建立了相關的數學理論。20 世紀中葉以來,隨著計算機的發明以及航天技術的發展,四元數才得到人們的重視[11]。
捷聯慣性導航系統中定義四元數Λ 為:

其中,i2=j2=k2=ijk=-1。
四元數微分方程定義如下[12]:

可采用離散方法求解四元數微分方程:若系統采樣周期為Ts,離散后的方程[13]為:
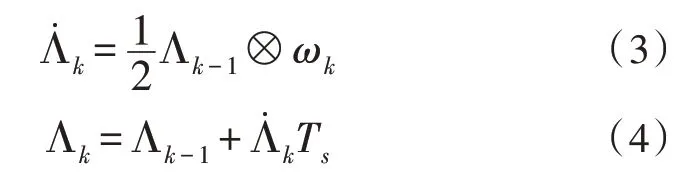
由四元數旋轉矩陣可解得3 個姿態角:
設初始四元數Λ0=[1 0 0 0]T,首先由式(3)、(4)可得到t時刻的四元數Λk,代入式(5)即可求得t時刻的3 個姿態角θ、φ、ψ。
2 傳感器數據融合與姿態解算
2.1 經典梯度下降算法姿態融合
梯度下降公式[14]為:

其中,?F(xn)為梯度值,μt為收斂步長。

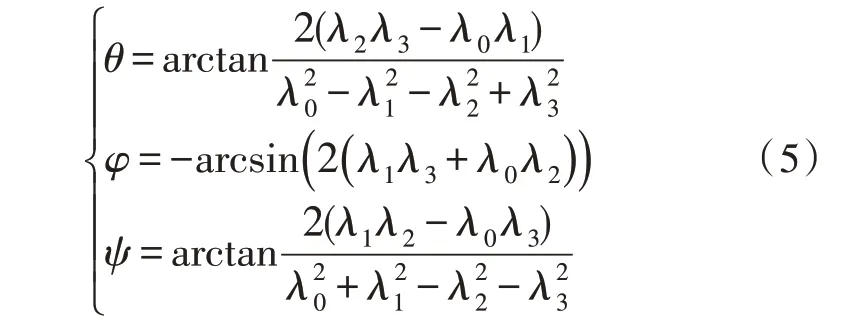
假設目標姿態為λ?,t,由梯度下降法有:
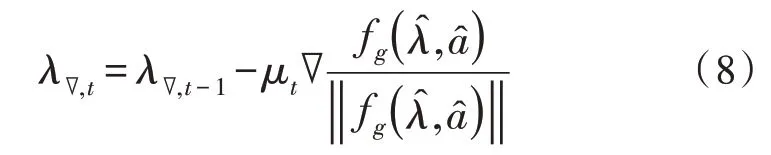
設基于陀螺儀微分方程求解到的姿態為λω,t,則融合姿態為[15]:

其中,0 ≤α≤1。
由于α的值很大,取式(8)的近似值并將所有表達式代入式(9),可得最終融合算法公式為[7]:

其中,β為λω,t的收斂速率,由手冊查到。
磁力計和加速度計的數據融合與上述過程類似,不再贅述。
2.2 自適應變步長姿態融合
當飛行器處于運動狀態時,重力場的測量值會存在偏差,所以需要減少梯度下降的補償量從而減少對加速度計的信任程度[16]。換句話說,公式中需要引入一個可變因子,在運動加速度越大時使β值越小。
設加速度的實際測量值為a,重力加速度用g表示,運動加速度即為二者之差。t時刻的前n個采樣點的運動加速度數學期望值為En,引入自適應因子ρa與常數控制因子Cona,則有:

融合公式(10)也發生改變,如式(12)所示:

當四旋翼飛行器高速飛行時,可通過常數控制因子使自適應因子與期望值呈負相關。據此原理,算法可以自適應地控制補償量的變化:運動加速度數據的數學期望越大,梯度下降部分的補償成分越小。在實際應用中,可以通過調節常數控制因子Cona與采樣點數n,來減少高頻干擾,進而提高系統的穩定性。
自適應算法簡明流程圖如圖2 所示。
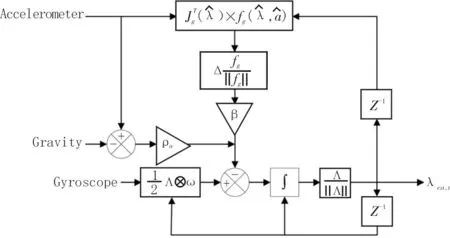
圖2 自適應算法簡明流程圖
3 實驗與分析
3.1 實驗平臺
實驗使用AHRS模塊搭建測試平臺,該AHRS模塊主控制芯片采用STM32F103T8,ARM 32-bit Cortex?-M3 內核,模塊傳感器部分組合使用了MPU6050 傳感器(其中包括加速度計、陀螺儀各一個)、HMC5883L傳感器(包括HMC118X 系列磁阻傳感器和相關集成電路)以及一個氣壓高度計BMP180,AHRS 模塊如圖3 所示,模塊實際尺寸為37.2 mm×21.4 mm。
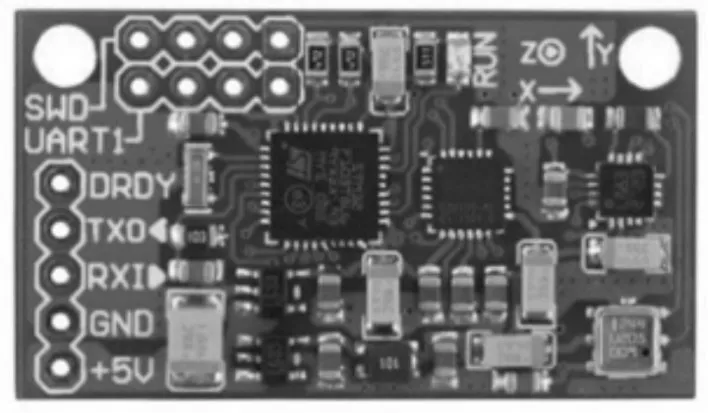
圖3 AHRS模塊
AHRS 模塊與PC 通過USB-TTL 轉換模塊(以CP2102 為內核)連接,用于實現AHRS 設備的供電與通信,該轉換模塊如圖4 所示。串口所連接的PC 軟件可直接讀取和導出各傳感器數據,并給出設備的實時理論準確姿態曲線。
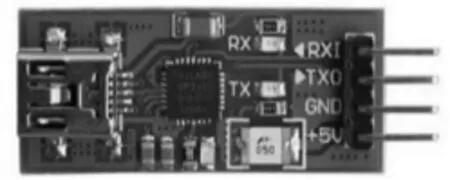
圖4 USB-TTL轉換模塊
測試平臺具有三軸旋轉維度,可模擬四旋翼飛行器在空間中的各種運動姿態。
3.2 實驗結果
為了驗證該算法的可靠性,選擇ψ角作為驗證角。實驗中,設定實驗平臺的軌跡為繞Z軸由0°旋轉至90°再旋轉至-90°,通過上位機軟件導出兩傳感器的數據并儲存。兩傳感器采集的數據如圖5(a)、(b)所示,其三軸分量以不同線型進行區分。
對自適應算法(AGD) 編程,各參數經調試后設置如下:采樣間隔T=1/256 s、融合步長β=0.1、常數控制因子Cona=0.95。實驗以互補濾波算法(CF)、經典梯度下降算法(GD)為對照組,將導出的傳感器數據分別讀入3 個算法程序進行解算,各算法對于同一軌跡的傳感器數據偏航角ψ的解算結果如圖5(c)、(d)所示。圖5 (c)中,實線為設備偏航角的理論精確姿態,從圖中可以大致看出,3 種算法均成功解算出了設備的姿態。圖5(d)為4~6 s 解算結果的局部放大圖,可以直觀比較3 種算法的解算效果。
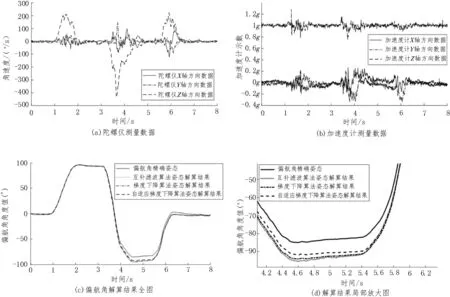
圖5 算法測試圖
由表1 解算結果誤差數值比較可以看出,3 種算法的誤差平均值均在3°左右,這是由于該算法只進行基于運動加速度的變步長研究,未包含磁力計和氣壓高度計的補償。在標準差方面,CF 方法下的誤差波動較大,GD 算法次之,AGD 算法結果最為穩定;在平均值方面,就該實驗而言,AGD 算法的精度較其他兩種算法分別提高了0.557°和0.708°。
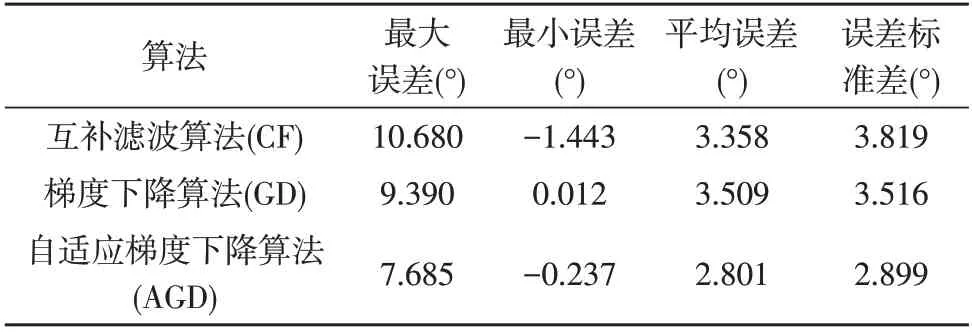
表1 解算結果誤差比較
4 結論
在四旋翼飛行器姿態測量中,高速且精確的姿態解算對飛行器控制有著至關重要的作用。該文提出了一種基于梯度下降的自適應變步長姿態融合算法,該算法可根據運動加速度的大小調整對加速度計數據的信任程度,從而提高解算精度。實驗中,該算法在解算AHRS 設備的偏航角時,收斂速度快,姿態輸出平穩,解算精度得到明顯提高。因此,該算法有較好的研究參考與工程應用價值。
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
數學年刊A輯(中文版)(2022年4期)2022-02-16 08:17:34
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
無線電通信技術(2021年4期)2021-07-13 08:58:28
無線電通信技術(2021年3期)2021-06-08 03:33:48
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
福利中國(2015年4期)2015-01-03 08:03:38
