純電動洗掃車電氣控制系統及云平臺應用
2022-05-25 08:14:57陳凱
專用汽車 2022年5期





摘要:隨著藍天保衛戰的打響,純電動環衛車輛需求逐步增加。介紹了一種純電動洗掃車電氣控制系統,采用CAN總線分布式控制技術,模塊化設計,實現了純電動洗掃車上裝與底盤之間的上下高壓控制及上裝作業模式控制,同時利用物聯網技術,實現了環衛車輛云端監控與管理。
關鍵詞:純電動洗掃車;CAN總線;模塊化;云平臺
中圖分類號:U469*91 收稿日期:2022—02—10
DOI:10.19999/j.cnki.1004-0226.2022.05.015
1 純電動洗掃車系統組成基本介紹
近年來,隨著環衛機械化程度的不斷提高和環衛車數量的不斷增加,傳統的車輛管理模式已經不能適應新形勢下的環衛車大規模、大區域、多車種聯合作業的特點,對環衛車輛的系統調度、遠程監控、遠程管理逐漸成為一種發展趨勢。本系統通過加裝車載遠程監控終端,利用物聯網技術,實現了純電動洗掃車的云平臺管理。
純電動洗掃車主要包括純電動底盤、上裝動力系統、液壓系統、氣路系統、水路系統、電氣系統。其中底盤提供行走動力及高壓配電管理,風機、水泵、油泵分別由電機提供動力。上裝電氣控制系統為整個控制系統的核心,電氣系統與底盤電池管理系統進行通信,從底盤預留上裝接口取電,同時上裝控制器與上裝三合一電機控制器進行通訊,分別控制風機、水泵、油泵三個電機,進而控制環衛車清掃系統、水路系統、液壓系統的正常工作。
2 純電動洗掃車電氣控制系統硬件組成
純電動洗掃車電氣系統硬件設計分為高壓動力部分和低壓控制部分,高壓控制部分主要由底盤高壓配電盒、高壓電纜、上裝多合一電機控制器、風機電機、水泵電機以及油泵電機組成。洗掃車底盤高壓配電盒已經預留上裝取電接口,多合一電機控制器通過底盤取電,經過預充電管理模塊后給電機供電。風機電機功率50 kW、水泵電機功率35kW、油泵電機5kW,根據不同工況,上裝總功率合計不超過80kW,底盤電壓為直流590 V,通過計算再結合底盤高壓配電盒接插件型號,上裝三合一控制器選用50平方的EV電纜,風機電機選用35平方電纜,水泵電機選用25平方電纜,油泵電機選用3x2.5平方電纜。高壓部分硬件電路如圖1所示。
低壓控制部分從底盤蓄電池低壓配電盒預留的保險取電,經過上裝保險繼電器盒分配五路低壓24 V電源,分別給上裝車載終端、上裝作業照明燈警示燈、洗掃降塵水泵、上裝顯示屏控制器、上裝IO模塊供電,此5路電源根據負載大小匹配不同的保險,做到通訊、控制、報警、作業監控等功能在出現故障時互不干擾,局部故障不會影響整個電氣控制系統,保證上裝控制系統穩定可靠。
純電動洗掃車電氣系統主要包括車載控制器及顯示屏、IO模塊、車載終端、風機電機控制器、水泵電機控制器、油泵電機控制器及維修調試操作盒組成。整體方案采用分布式CAN總線控制方式,控制器為整套系統的核心,負責與底盤、上裝動力及低壓控制部分進行CAN通訊及輸入輸出采集。同時與車載終端通訊,將車輛實時狀態發送給GPS車載終端,車載終端將車輛的實時作業狀態及工作參數回傳到服務器,實現遠程監控環衛車作業情況,控制系統拓撲圖如圖2所示。
車載控制器總共由三路CAN總線通訊接口,CAN總線波特率為250K,為保證通訊質量穩定可靠,對上裝通訊系統進行合理分配:CAN1負責和上裝電機控制器及上裝IO模塊進行通訊,保證洗掃作業功能穩定可靠;CAN2負責和純電動底盤通訊,保證上裝和底盤高壓上電及下電功能穩定可靠;CAN3負責與環衛平臺車載終端通訊,將洗掃車實時作業狀態發送給車載終端,上傳至環衛平臺。三路CAN總線互不干擾,負載率全部在30%以下,保證系統穩定可靠。
3 純電動洗掃車電氣控制系統軟件主要功能
本系統選用的車載控制器以CODESYS V3.5為編程平臺,通用性強,可以采用多種編程語言編程,本程序采用ST語言進行編程。純電動洗掃車電氣系統軟件設計主要功能包括:上裝高壓取電控制、作業模式選擇、作業流程控制、車輛狀態監控及遠程傳輸功能。
3.1上裝高壓取電控制流程
純電動環衛車底盤通常會預留上裝高壓取電接插件,上裝通過底盤高壓配電盒預留接插件,將底盤直流高壓接插件連接至上裝風機、水泵、油泵三合一電機控制器。底盤高壓上電后,上裝控制器上電,當上裝控制器檢測到底盤高壓上電正常后,與上裝三合一控制器進行通訊,向電機控制器發送高壓上電指令,三合一控制器開始進行預充流程,吸合上裝預充接觸器,當上裝電壓達到要求以后,閉合主接觸器同時斷開預充接觸器,上裝上高壓完成2。當底盤高壓異常或者底盤鑰匙開關關閉發出退電信號以后,上裝控制器與電機控制器通訊,電機控制器執行下高壓控制。上裝高壓上電流程如圖3所示。
3.2作業模式選擇控制流程
純電動洗掃車包括干掃和洗掃兩種作業模式,每種作業模式根據掃盤及吸盤自由組合作業,總共分為全洗掃、左洗掃、右洗掃、全清洗、左清洗、右清洗、全干掃、左干掃、右干掃及單獨吸塵作業10種作業模式。本系統采用CAN總線觸摸屏設計,按下主界面模式觸摸按鍵,顯示屏自動翻頁到模式選擇界面,選擇對應的模式,按下確認按鍵,控制器自動根據選擇的模式切換掃盤、吸盤等作業機構,同時控制器會記憶當前作業模式,斷電重新上電后自動進入上次選擇的模式,方便環衛作業人員操作,作業模式選擇如圖4、圖5所示。
3.3作業流程控制
作業模式選擇完成后,控制器根據選擇的作業模式,監測清水箱是否缺水,水路閥門是否打開,是否需要啟動風機、水泵、油泵電機。同時監測底盤高壓狀態及上裝電機狀態,如果系統正常,則進行下一步作業流程。如果異常,則發送報警指令給語音報警模塊,語音報警模塊根據預制的系統語音報警,提醒作業人員系統異常。
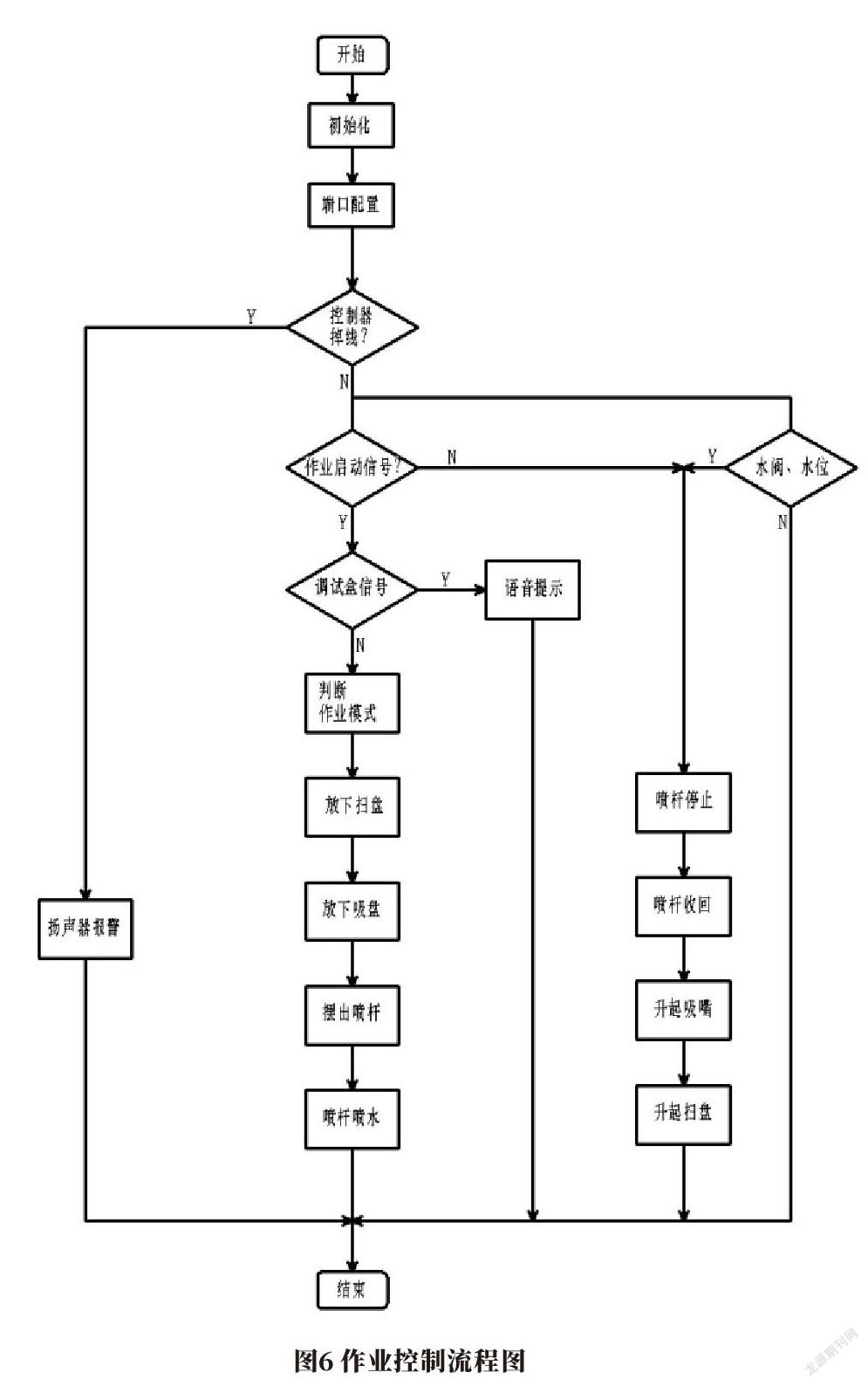
作業啟動后,根據選擇的作業模式,啟動油泵電機控制器,油泵電機帶動油泵,同時IO模塊控制液壓系統及氣路系統的液壓閥和氣閥得電,依次放下掃盤、吸嘴、擺出高壓水路噴桿等作業機構,風機電機控制器驅動風機轉動,水泵電機控制器驅動高壓水泵,根據不同路面設置不同的作業轉速,開始掃路作業。當按下作業停止按鍵或作業過程中監測到系統異常時,控制器發送停機指令IO模塊接收到停止作業指令時,反順序依次收起各作業機構,停止作業,作業控制流程圖如圖6所示。
3.4車輛狀態監控及遠程傳輸功能
車輛狀態監測主要包括通訊狀態、IO輸入狀態、輸出狀態、電機狀態、底盤狀態的監控。電氣控制系統與底盤、IO模塊、電機控制器分別制定對應功能的通訊協議,并且對CAN通訊進行心跳監測,當某個模塊心跳信號保持不變時,系統判斷為模塊掉線,在顯示屏通訊狀態監控界面進行圖形及文字提示。在顯示屏系統狀態監控界面,分別顯示輸入、輸出、電機、底盤的實時狀態,操作者可以非常方便地了解車輛的工作狀態。同時車載控制器和智能終端進行CAN通訊,將車輛的所有工作狀態以CAN報文形式發給車載終端,車載終端通過4G網絡傳輸發送給環衛平臺,環衛平臺可以實現車輛狀態的遠程實時監測,同時可以統計及分析車輛數據,方便故障排除,提高售后服務效率。
4 智慧環衛云平臺功能
純電動洗掃車智能終端通過GPS及北斗定位系統,實時監測車輛位置,平臺服務器根據車輛設備軌跡點實現車輛軌跡回放功能。另外,車載終端通過CAN總線與環衛設備控制器通訊,將車輛的實時作業狀態及工作參數回傳到服務器,實現遠程監控環衛車作業情況。
環衛云平臺的主要功能包括:
a.車輛實時監測管理:通過安裝車載終端實現掃路車作業車輛的實時位置與作業狀態的在線查看與追蹤。具體包括實時位置、地址、速度、方向、行駛路線、點火狀況等信息,同步實時預警車輛違規行為。
b.車輛軌跡回放:系統通過保存車輛所有的實時位置數據,生成車輛軌跡記錄。選擇對應的車牌號、時間,可以檢索到車輛的軌跡記錄,實現在線回放行程軌跡記錄。
c.車輛信息管理:主要包括車輛列表、車輛信息維護與狀態監控、司機信息管理等。環衛平臺運用數據庫技術實現環衛車輛基本信息的管理,包括車牌號、發動機號、作業類型、所屬作業隊伍、所屬部門、服務區域、品牌型號、載質量、開始使用時間、使用年限等,實現對環衛作業設備信息化管理。
d.環衛任務調度管理:管理人員可以規劃環衛任務路線,指派車輛進行規劃路徑任務作業,同時可以在軌跡回放時比較路徑是否出現偏離,提升環衛作業質量。
e.車輛報警管理:報警信息管理可查看車輛報警記錄,在線查看車輛故障狀態,查詢報警時間地點。環衛平臺實時監測車輛作業狀態,根據預先設置的報警條件,可以實時判斷車輛各部件的工作情況,當車輛發生故障報警時,實時提醒管理人員和車輛司機,為車輛正常作業保駕護航。
f.統計報表管理:主要包括車輛數量統計、車輛運行狀況統計、車輛型號統計、油耗里程統計、停車時長統計等。匯總統一管理模塊通過一定的查詢條件,形成統計報表。如查詢某一區域所有車輛數量分布、某一區域除雪車數量等,支持導出打印。環衛運營管理部門通過分析統計報表,合理優化環衛作業設備,提升環衛作業質量。
5 結語
本系統采用CAN總線全觸摸加實體按鍵顯示屏為控制核心,基于分布式模塊化設計,實現了純電動洗掃車上裝電氣控制功能及云平臺遠程管理功能。較其他控制模式,本系統有以下優點:
a.采用分布式CAN總線拓撲設計,模塊化設計,整車線束簡單可靠,同時模塊化設計方便在后期加裝其他功能進行擴展,通用性強。
b.采用全觸摸加實體按鍵顯示屏設計,界面美觀,操作簡便,一鍵作業模式選擇及啟停控制,人機交互方便。
c.利用物聯網技術,實現了車輛狀態的遠程監控與云平臺管理,為智慧環衛提供接口,實現車輛集管控功能。
根據國家“十四五”發展規劃,公共領域會逐步推廣新能源車型。環衛車作公共領域車輛的重要組成部分首當其沖。純電動環衛車電氣系統作為上裝控制核心,其可靠性及易用性必然會影響環衛車整車品質。基于CAN總線的純電動環衛車控制系統設計布局合理,CAN總線是現場總線的一種,因其在數據通信方面有著較高的可靠性和實時性,在汽車網絡系統中被廣泛應用3。
在物聯網飛速發展的今天,基于物聯網的數字化智慧環衛運營PPP模式已經成為一種趨勢。智慧環衛云平臺是數字環衛系統的延伸和發展,本系統通過與車載終端聯合通訊,實現了環衛云技術與物聯網整合,實現了環衛車的智慧集中遠程監控與管理,必然會成為未來的發展趨勢。
參考文獻:
[1]王淑寶,曹曼.我國智慧環衛的發展現狀與趨勢[J].建設科技,2016(21):26-28.
[2]姚子欣.電動汽車預充電保護設計[J].科技與創新,2021(19):81—82.
[3]郭之梁.電動汽車CAN總線網絡調度策略的研究[D].沈陽:遼寧大學,2017.
作者簡介:
陳凱,男,1987年生,工程師,研究方向為環衛車上裝電氣系統及煤礦掘進設備智能化系統的設計與開發。
猜你喜歡
海洋信息技術與應用(2022年1期)2022-06-05 07:38:22
裝備制造技術(2021年2期)2021-07-21 05:38:44
現代裝飾(2020年5期)2020-05-30 13:01:56
中國核電(2017年2期)2017-08-11 08:00:56
流程工業(2017年4期)2017-06-21 06:29:52
流程工業(2017年4期)2017-06-21 06:29:50
電腦知識與技術(2016年26期)2016-11-24 17:30:56
中國市場(2016年36期)2016-10-19 04:43:09
中國新通信(2016年16期)2016-10-18 10:45:11
企業導報(2016年11期)2016-06-16 15:36:34
