一種智能導盲杖系統的設計
2022-05-26 10:39:34郭昭烽莊一帆
電腦與電信 2022年3期
郭昭烽 謝 玲 莊一帆
(1.光大環境科技(中國)有限公司,江蘇 南京 211102;2.南京理工大學紫金學院,江蘇 南京 210046)
1 引言
目前我國的盲人總人數約占世界的五分之一,是世界上擁有最多盲人的國家。同時,我國每年都會大約新增加45萬名盲人和135萬名視力障礙者。在我國,盲人出行基本上只有兩種方式:傳統手杖和導盲犬引導。傳統的導盲杖對于盲人的幫助很小。盲人需要花費很多的時間來練習這種導盲杖,通過敲擊地面靠自己固有的經驗來判斷前方是否可以安全正常行走。這種方式的局限性非常大。對于盲人而言,最重要的是在未知的地方獲取道路形狀和障礙物位置的信息。有了這些信息,他們可以避免意外的障礙,安全地到達目的地。因此,設計一款可以真正幫助到盲人檢測到人行橫道、及時提醒盲人避開障礙物并且能夠在夜間提示周圍人的導盲手杖意義十分重大。
2 系統框架及功能設計
設計的導盲杖以STM32F103C8T6為微控制器。選擇它的原因是因為它能滿足本設計需要用到的超聲波、語音合成和機器視覺開發功能。該控制器串口以及端口豐富,且功耗較低,可供選擇的引腳數目比較多,價格便宜既能滿足需要又能降低導盲杖的成本。
整個系統功能設計如下:
(1)主動探測障礙物功能。采用超聲波傳感器,通過計算超聲波遇到障礙物返回的時間,測出導盲杖與障礙物的距離,如果距離過近則發出警報。
(2)震動報警功能。當超聲波測定的距離小于預設值時,通過控制器,控制直流電機震動馬達震動,提醒盲人前方障礙物。
(3)語音提示功能。選用SYN6288模塊,在前方沒有障礙物時提示使用者“前方可以行走”,在超聲波檢測到障礙物時停止播報。在前方沒有障礙物的前提下,如果檢測到盲道則播報盲道,如果檢測到人行橫道,則播報人行橫道。
(4)智能識別功能。在導盲杖上連接一個OPENMV4攝像頭模塊,通過其內置的深度學習訓練神經網絡進行盲道與人行橫道的識別。
3 硬件組成
如圖1為導盲杖的實物圖和設計圖,導盲杖的內部是鏤空的,方便將各個芯片和線路放置到導盲杖的內部。將震動模塊安裝在導盲杖的把手位置,這樣震動時手部感受到的震動是最大的。將語音芯片的喇叭安裝在導盲杖的頂部,這樣使用者可以更清晰地聽到提示音。盲人原來使用普通導盲手杖時,采用敲擊地面的方式只能感受到前方較低地方的障礙物,所以本設計將超聲波傳感器安裝在導盲杖高度的2/3處,這樣可以幫助盲人檢測較高地方的障礙物。將OpenMV攝像頭以約30°的角度安裝在導盲杖高度的約1/3處,這樣可以更好地觀察到地面的情況,以便進行道路分類。
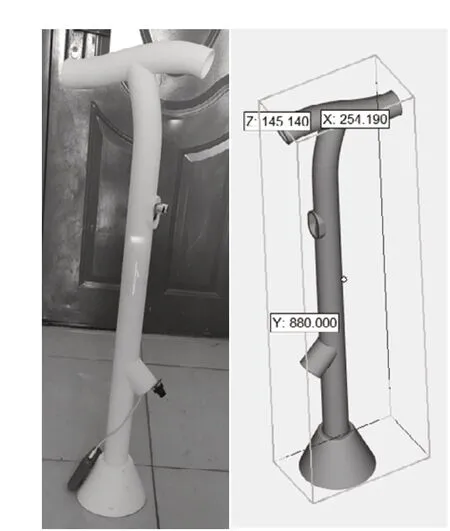
圖1 導盲杖實物圖和設計圖
系統硬件設計及主要接口連接圖如圖2。
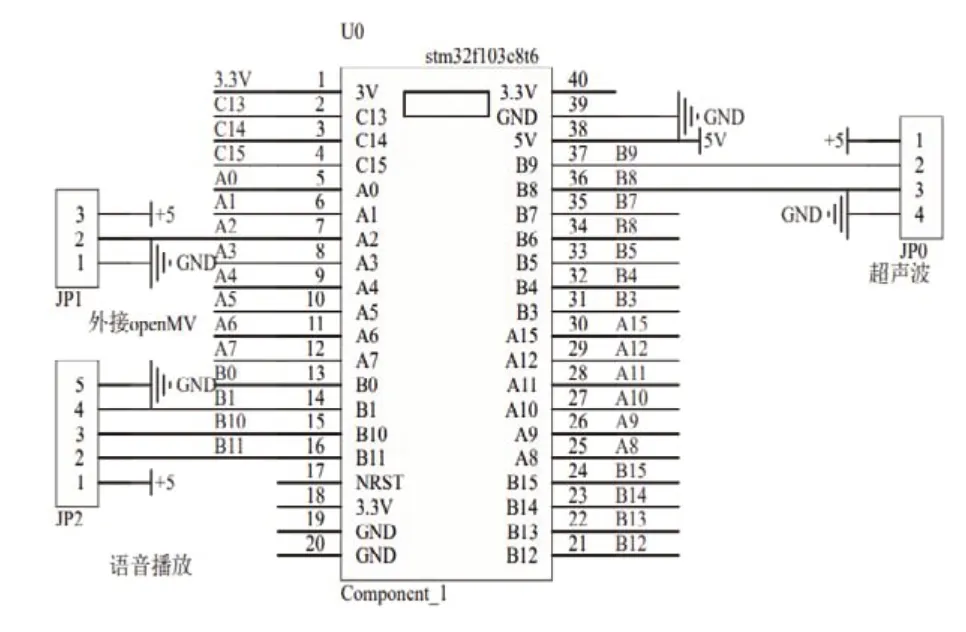
圖2 系統硬件設計及主要接口連接圖
其中,超聲波測距模塊選擇HC-SR04,用來測量導盲杖和障礙物之間的距離。該模塊測量精準度為3mm,不通過接觸可以測量前方2cm 到400cm 的距離。超聲模塊的VCC 接5V,GND 接地,Trig 口接STM32 芯片的B8 口,Echo 口接STM32芯片的B9口。
震動模塊采用高質量手機震動馬達。通過Mos 管放大驅動,對于震動效果進行提升。可通過PWM 控制調節馬達的震動強。可以通過Ard數字口控制震動電機,當輸入為高電平的時候,電機就會震動[4]。震動模塊VCC接5V,GND接地,IN口接C13口。
語音合成模塊采用SYN6288 中文語音合成芯片。SYN6288 通過串口通信的方式與STM32 芯片進行數據傳輸。SYN6288 的TXD 接口接STM32 的RXD 接口,RXD 接STM32的TXD接口,GND接地,VCC接5V。SYN6288芯片在進行串口通信時最多可以接收206個字節的數據。
采用OpenMV Plus,是一款具有圖像處理功能、可以訓練神經網絡模型的可編程單片機攝像頭,可以通過MicroPython 控制。OpenMV 的TXD 口接STM32 芯片的RXD 口即A2口,VCC接5V,GND接地。
4 軟件設計
主控部分使用KEIL5環境進行開發,軟件整體流程圖如圖3。
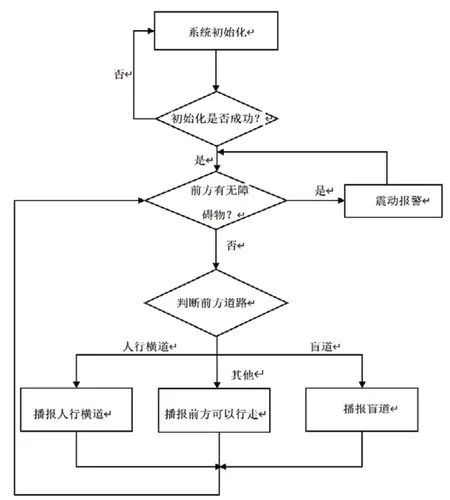
圖3 系統軟件流程圖
當盲人面前沒有障礙物時,語音播報前方可以行走,遇到盲道語音播報前方是盲道,遇到人行橫道語音播報前方是人行橫道,當前方遇到障礙物時停止播報,同時馬達震動提醒使用者。
4.1 超聲波和震動模塊
首先要設置定時器,以及對HC-SR04 的端口進行初始化。系統選擇TRIG觸發的方式通過IO口進行測距,初始化先要把電平降低,然后發送超過10us 的高電平型號;接收到高電平信號以后,會產生8個40kHz的方波,如果接收器接收到返回的信號,則會在IO口上輸出一個高電平,高電平持續的時間可以看作是超聲波一個來回的時間,即所需要測量的距離就等于高電平時間乘以聲速的一半[3]。當距離小于預設值時控制震動馬達震動。
4.2 語音模塊
SYN6288 芯片在進行串口通信時最多可以接收206 個字節的數據。其中幀頭1字節,數據區長度2字節,數據區可以小于等于203 字節。使用時需要分配一個串口給SYN6288使用,波特率設置成默認的9600。
主程序關鍵代碼如下:

4.3 OpenMV模塊
OpenMV4使用OpenMV IDE環境進行開發,使用Micro-Python 進行編程。在OpenMV 上訓練神經網絡模型分為四個步驟:
第一步通過OpenMV IDE采集數據集,一般一個分類需要200張左右的數據集進行訓練,這里設置兩個分類:盲道和人行橫道。
第二步將采集的圖像上傳到EDGE IMPULSE的在線網站上,上傳之后首先要清洗數據集,然后進行圖像的預處理,將圖片的大小調整到96*96,圖像格式選擇RGB。預處理完成,會生成數據集分布圖,如果兩個分類基本上是分開的、區別較明顯,證明數據采集比較成功,否則需要重新采集數據或清洗數據。
第三步進行在線訓練模型,設置深度學習的輪數、學習率,同時勾選圖片增廣,可以擴大數據集的樣本容量,使訓練結果更加精準,避免過擬合,最后設置置信度。訓練過程中,loss 逐漸降低,accuracy 即準確度逐漸升高并且最終提高到1。如果訓練過程中準確率在前幾輪就達到了比較高的數值,則會直接停止訓練防止過擬合的情況發生。訓練結束后會先自動生成float32 的模型,然后轉化成int8 量化的類型,最后顯示訓練結束。
第四步將訓練好的模型及代碼下載到OpenMV 里。然后通過串口通信將模型檢測出的數據傳輸給STM32,接入到主控程序中。
訓練過程及結果如圖4、5所示。

圖4 訓練過程
5 結語
文章介紹了一種智能導盲杖系統的設計,從功能需求、硬件組成、軟件設計三方面進行說明,使用深度學習訓練后的模型進行圖像識別,結合超聲波傳感模塊、語音合成模塊、震動模塊構建系統。該設計可以高效地解決盲人對于身處路段不明的問題,有效地幫助盲人解決出行困難以及安全方面的問題,提高盲人的生活水平。希望在未來,導盲杖功能可以更加齊全,也更加輕便,使得盲人的生活水平進一步提高。
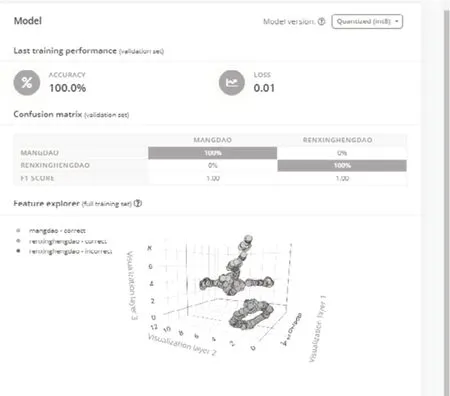
圖5 訓練完成