計及耦合因素的電動汽車充電負荷時空分布預測
2022-05-26 08:58:44程杉趙子凱陳諾于子豪
電力工程技術 2022年3期
程杉, 趙子凱, 陳諾, 于子豪
(1. 電力系統(tǒng)智能運行與安全防御宜昌市重點實驗室(三峽大學),湖北 宜昌 443002;2. 三學電氣與新能源學院,湖北 宜昌 443002)
0 引言
發(fā)展清潔能源已成為必然趨勢,我國明確提出“十四五”時期將推動能源清潔低碳、安全高效利用。目前,新能源產業(yè)正進入加速發(fā)展的新階段,電動汽車(electric vehicle,EV)既為經濟增長注入強勁新動能,又有助于實現(xiàn)“碳達峰,碳中和”目標[1—2]。但大規(guī)模EV充電負荷接入給電網運行安全性和穩(wěn)定性帶來巨大沖擊[3—5],因此降低此負面影響、促進EV與電網互利共贏需要研究大規(guī)模EV的分布特性和充電負荷的有效預測[6—7]。
現(xiàn)階段,國內外學者針對EV在出行鏈和其充電負荷時空分布預測模型建立上已有一定研究。文獻[8]通過對EV自身條件、充電設施和用戶習慣的研究,建立EV充電負荷影響因素模型,但未考慮EV在道路中的時空轉移對充電負荷的影響。文獻[9]基于出行鏈與原點-終點(origin-destinatin,OD)矩陣確定EV起訖點,并采用跟馳模型對EV在路網中的行程進行微觀分析,但忽略了EV行程中的隨機性。文獻[10]則基于EV出行途中的動態(tài)交通信息建立了路段和節(jié)點阻抗模型,對其出行行為進行預測,并利用OD矩陣和最短路徑算法確定EV出行行程。文獻[11]考慮動態(tài)EV行駛過程,建立了速度與車流量關系模型和動態(tài)路況模型。文獻[12]不設定起訖點,通過EV歷史出行特點擬合出行概率函數(shù),利用馬爾可夫決策過程(Markov decision process,MDP)理論和輪盤賭算法模擬EV出行鏈,但未考慮動態(tài)交通信息對出行鏈的影響。
EV時空分布預測通常分為2類:一是基于歷史真實數(shù)據(jù)預測未來短期內的EV出行規(guī)律[13—14];二是建立EV空間轉移模型模擬EV出行路徑的選擇[15—16]。第二類方法中車主出行選擇是影響預測精度的一個重要因素,現(xiàn)有研究大多把重點放在最優(yōu)出行鏈中,忽視了車主出行時面臨抉擇的主觀性和隨機性[17—18]。此外,EV作為通行工具和負荷載體,其充電行為不僅受汽車性能、電池損耗程度等自身車況因素的影響,還受到天氣、溫度、交通路況、日期類型[19—22]等出行環(huán)境的影響。綜上所述,EV時空負荷預測主要存在以下2點問題:一是上述文獻對EV時空分布進行建模求解時,缺少對車主出行行為方式及空間動態(tài)路況的考慮;二是現(xiàn)有的路況環(huán)境模型多是單向對出行鏈信息輸入,而未考慮路段內EV數(shù)量變化對交通信息的影響。建立動態(tài)出行信息模型有助于提高對EV時空分布位置、到站信息和充電需求的預測精度。
針對上述問題,文中建立一種計及耦合因素的EV充電負荷時空分布預測模型。根據(jù)居民出行需求和EV的不同類別構建私家車、出租車和公交車出行模型,并考慮溫度、道路等級、擁堵情況,建立EV單位里程能耗模型。為模擬車主在當前動態(tài)更新交通信息下的決策行為,將出行模型與動態(tài)更新的能耗模型結合,以單次出行時長為依據(jù)構建MDP出行鏈,進而實現(xiàn)對EV出行路徑的動態(tài)規(guī)劃、空間位置分布預測和實時電量計算。根據(jù)EV時空分布與充電條件獲取EV充電負荷接入充電站時刻。以某典型區(qū)域為例,對比分析EV及其充電負荷在不同策略、職能區(qū)域和出行日情況下的時空分布,驗證了所提方法具有一定現(xiàn)實意義與參考價值。
1 EV時空轉移模型
將EV的出行起訖點根據(jù)車主的出行意愿分為5種:回家(H)、工作(W)、購物用餐(SE)、社交休閑(SR)和其他事務(O)。在不同類別節(jié)點均設有EV充電站,節(jié)點間的空間轉移即為EV行駛過程。
1.1 不同EV出行模型
考慮區(qū)域內居民日常出行需求,根據(jù)EV出行時間、行為方式和充電需求不同,將EV分為私家車、出租車和公交車。針對其不同特點建立3種出行鏈,如圖1所示,Nn為隨機網絡節(jié)點;S為公交車起始站;E為公交車終點站。
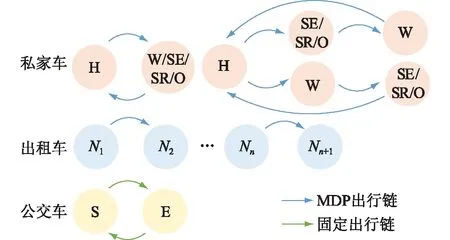
圖1 EV出行模型劃分Fig.1 EV travel model division
公交車出行模型往返于起訖點之間,如圖1中公交車出行鏈所示,一般根據(jù)當?shù)鼐用裥枨笠?guī)劃出行路線并固定出行時間,此處不在贅述。
1.1.1 私家車出行模型
私家車出行具有較強的目的性,依據(jù)MDP理論考慮車主的出行體驗,建立私家車出行模型。
文中采用“H—W”(表示EV從家前往工作地)方式來描述出行鏈。私家車出行分2類:第一類為單一目標出行鏈,即圖1中私家車出行鏈左側所示的H—W/SE/SR/O—H;第二類為多目標出行鏈,即圖1私家車出行鏈右側所示的H—SE/SR/O—W—H或H—W—SE/SR/O—H。EV出行時刻ts與停留時長tp符合正態(tài)分布,其概率密度函數(shù)為:
(1)
式中:μ,σ分別為t時刻的均值和方差。通過調整μ和σ確定不同出行鏈的ts與tp。
1.1.2 出租車出行模型
出租車出行具有極高的隨機性,采用輪盤賭算法隨機生成其終點,利用MDP理論決定出行路徑,如圖1出租車出行鏈所示。出租車的平均載客時長[23]和平均接客等待時間μtaxi表達式分別為:
(2)
μtaxi=T1-Ttaxi,t
(3)
式中:Ttaxi,t為t時刻出租車的平均載客時長;qx為擬合參數(shù);x為自然數(shù);T1為60 min。
假設出租車的停車等待時間與私家車tp一樣服從正態(tài)分布,可根據(jù)式(1)利用蒙特卡洛法抽取EV出租車的接客等待時間。
1.2 基于MDP理論的路徑模擬及抉擇
1.2.1 EV出行階段劃分
采用MDP理論模擬車主對EV出行路徑的決策。如圖2所示,將EV出行鏈分為4個階段:
(1) 出行準備階段。根據(jù)出行需求獲取EV出行目的地。
(2) 行駛階段。根據(jù)溫度、道路等級和擁堵情況計算EV耗能。
(3) 決策階段。根據(jù)EV荷電狀態(tài)(state of charge,SOC)判斷是否滿足下一段路徑行駛的電量需求。若滿足需求,則根據(jù)剩余行程信息采用MDP理論確定下一段行駛路徑;若不滿足,則在此站點進行充電。
(4) 目的地。若EV轉移至終點,記錄自身行駛信息。利用EV歷史信息(僅與前一天的行程有關)和SOC閾值判斷EV是否有充電需求,如有,則駛入充電站內。
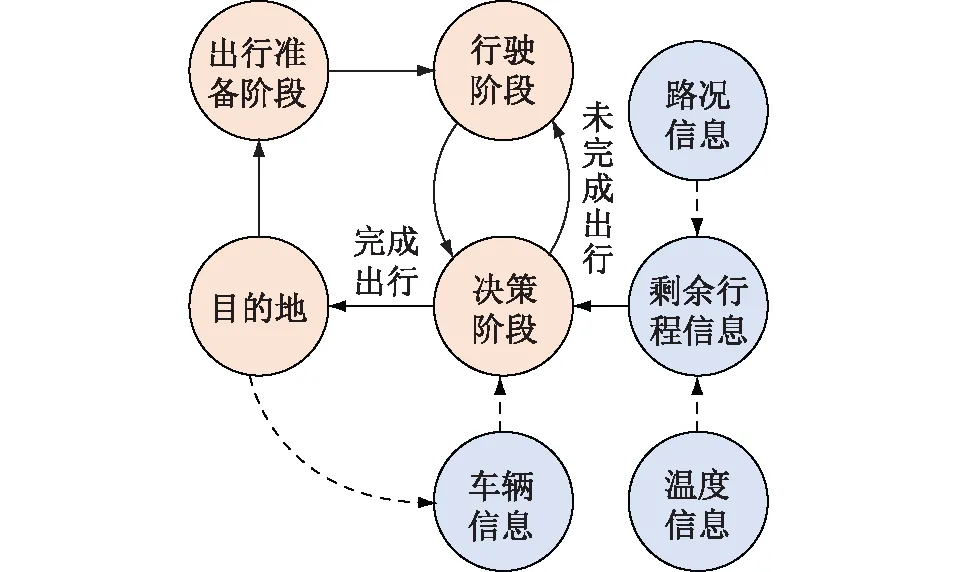
圖2 EV行駛階段劃分Fig.2 EV driving stage division
1.2.2 EV出行路徑決策
EV行駛過程中節(jié)點轉移如圖3所示,其中rm,n為第m次抉擇時選擇第n個相鄰節(jié)點;a為EV可選擇出行路徑。假設EV從r1,1出發(fā),在行駛途中每次可轉移節(jié)點有n個,經過m-2次抉擇到達目的地rm,1。將EV在行駛過程中可能經過的所有路段視為狀態(tài)集S;EV到達各節(jié)點的所有時刻視為決策時刻集T;EV在所有決策時刻做出的路徑決策所組成的集合視為行動集A;EV在行駛過程中每段路徑的行駛時間視為報酬R。

圖3 節(jié)點轉移示意Fig.3 Schematic diagram of node transfer
EV出行具有馬爾可夫性,基于EV行駛過程中車主對剩余行程最短時間與路網擁堵信息的考慮,EV從當前節(jié)點rcur轉移到下一節(jié)點rnex節(jié)點的節(jié)點間轉移概率為P(a|rcur,rnex),如式(4)所示。
(4)

由式(4)可得EV在當前節(jié)點向所有相鄰節(jié)點轉移的概率,即以剩余行程出行時長為目標,形成一個總概率密度為1的EV節(jié)點轉移密度函數(shù),然后依據(jù)蒙特卡洛法選取EV轉移節(jié)點。完成轉移后,重復上述過程直至EV轉移至終點,據(jù)此形成MDP出行鏈。
2 EV充電負荷時空分布預測
2.1 動態(tài)路況信息模型
EV時空轉移過程中,高溫和擁堵等外因制約著EV的單位里程能耗和出行速度,間接影響出行時長和車主對出行路徑的選擇,從而改變EV充電負荷的時空分布。
2.1.1 擁堵模型

(5)
調整修正參數(shù)bj可以改變仿真中各路段內的交通流量,在實際應用中可根據(jù)真實路況進行取值以模擬由于EV滲透率不足所致的汽車擁堵,文中仿真的所有路段bj取值相同。
2.1.2 EV單位里程能耗模型
EV單位里程能耗、道路等級和v之間的關系可表示為[24]:
(6)


(7)
式中:py為擬合參數(shù);y為自然數(shù);c為當前環(huán)境溫度。
(8)

2.2 EV充電負荷預測
基于1.1節(jié)的EV出行模型和2.1節(jié)的路況信息模型,對EV充電負荷時空分布進行計算,其流程如圖4所示。
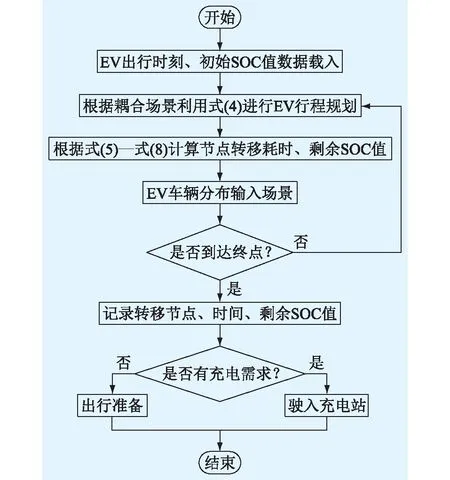
圖4 EV充電負荷計算流程Fig.4 Flow chart of EV charging load calculation
為提高初始信息如歷史SOC值、擁堵情況等信息的可靠性,采用經驗值進行預仿真,記錄所得EV時空分布數(shù)據(jù)、SOC值并修正經驗值。道路內車輛數(shù)量隨時間不斷變化,在EV單次行程中,每次節(jié)點轉移后的末端時刻更新道路車輛數(shù)量,并重新計算下一次節(jié)點轉移時EV的行駛速度;場景模型中的擁堵情況和溫度則在調度周期ΔT開始時刻進行更新。
3 算例仿真及分析
3.1 交通網絡和EV參數(shù)
某典型區(qū)域的交通拓撲結構如圖5所示。根據(jù)區(qū)域內生活需求的不同類型對區(qū)域進行劃分。節(jié)點1~6為居民區(qū);節(jié)點7~10為工作區(qū);節(jié)點11~15提供購物用餐、社交休閑服務,定義為休閑區(qū);節(jié)點16為其他,仿真時將其納入休閑區(qū)。各交通節(jié)點處均配備充電站,城市道路為雙行路。

圖5 仿真區(qū)域拓撲Fig.5 Simulation area topology
區(qū)域內私家車、出租車和公交車分別有2 280輛、500輛和50輛。公交車出行時間、路徑較為固定,其充電行為也較為規(guī)律,但充電負荷較大,所以文中只對其接入電網負荷進行分析。車主在工作日和非工作日出行需求不同,采用經驗值設置起始時各節(jié)點內私家車出行目的地,進行預仿真作為歷史數(shù)據(jù),采用灰度預測累加生成的方式生成區(qū)域內不同出行目的地的私家車數(shù)量。
配置2種類型的EV,參數(shù)見表1:EV1為小型轎車,用于私家車和出租車出行;EV2為大型公交車。其中,CEV為EV電池容量;PEV為EV在站內的充電功率;Rch為充電效率;Sexp為充電期望SOC值;Smin為最低SOC閾值。仿真調度時段為24 h,擬合參數(shù)與調度周期如表2所示。

表1 EV配置參數(shù)Table 1 EV configuration parameters
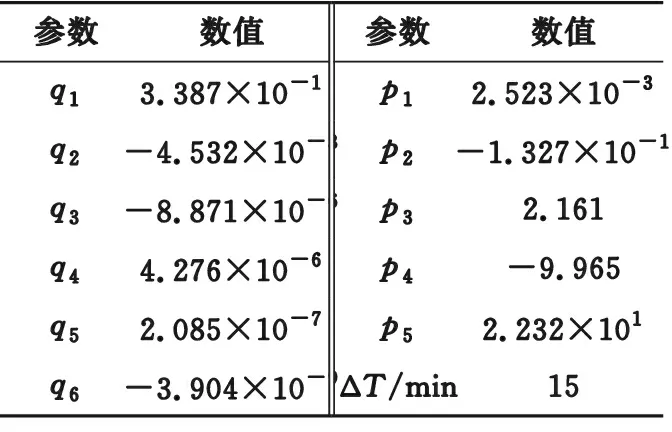
表2 擬合參數(shù)與調度周期Table 2 Fitting parameters and scheduling time
假設EV滿足如下條件之一時即在當前站點充電:
(1) 完成整個行程時SOC值小于充電閾值0.2;
(2) 行駛中SOC值低于Smin或不足以使其轉移至下一節(jié)點;
(3) EV到達終點時剩余SOC值小于該EV單次行程所消耗的SOC值。
3.2 出行策略對比
為體現(xiàn)采用動態(tài)信息的MDP出行鏈的優(yōu)勢性,另設3種典型傳統(tǒng)策略和一種無EV與交通信息交互的策略進行對比。策略1:采用最短路徑法;策略2:采用蒙特卡洛法的出行鏈[26];策略3:采用文獻[6]的MDP出行鏈;策略4:采用文中MDP出行鏈但無動態(tài)交通信息;策略5:文中MDP出行鏈含動態(tài)交通信息輸入。圖6為不同出行策略的對比結果。

圖6 不同出行策略對比Fig.6 Comparison of different travel strategies
將圖6中的策略1、2、3與策略4,策略5與策略4分別進行對比,可以看出:
策略1采用的最短路徑法沒有考慮到自身車輛聚集會導致道路擁堵,因此EV在行程規(guī)劃中只會作出同一種抉擇。策略1的單出行鏈出行時長較策略4低33.87%,但其出行路徑抉擇方式不符合EV出行具有隨機性的特點。
策略2考慮了出行時長,采用蒙特卡洛法抽取出行行程,其所預測出的單出行鏈時長較策略4高9.80%。策略2獲取出行行程的方式是根據(jù)已有行程信息確定整個出行鏈,因此其概率密度函數(shù)的準確性取決于歷史數(shù)據(jù)的可靠性。EV的出行具有馬爾可夫性,策略4利用MDP理論在每個節(jié)點根據(jù)當前位置、目的地、路網信息重新規(guī)劃下一行程,能更有效地獲取EV出行鏈。
策略3的節(jié)點轉移次數(shù)、單出行鏈時長較策略4分別要高17.23%和21.53%,這是由于策略3所采用的出行鏈與文中MDP出行鏈計算報酬R的方式不同,與文中通過式(4)計算所得相鄰節(jié)點的轉移概率函數(shù)也不同。策略3轉移概率側重于體現(xiàn)車主根據(jù)當前位置對相鄰最短路徑的選擇;而策略4轉移概率側重于體現(xiàn)車主對總出行時長最短的需求,更符合車主的一般出行需求,能得到更有效的數(shù)據(jù),實現(xiàn)對EV時空分布的預測。
策略5相較策略4節(jié)點轉移次數(shù)降低3.80%,單出行鏈時長和節(jié)點轉移時長分別降低了5.65%和1.98%。這是由于建立動態(tài)信息可以不斷更新2.1.1節(jié)的擁堵模型,使EV在路網中的分布能通過式(5)影響EV在道路內行駛的速度,進而改變出行鏈中各節(jié)點轉移概率,有助于車主根據(jù)當前時刻前行道路的擁堵情況抉擇出下一行駛路徑,驗證了動態(tài)交通信息能帶給車主更短出行時長的行駛體驗。
3.3 EV數(shù)量的時空分布
以典型工作日為例,道路內EV時空分布如圖7所示。

圖7 EV時空分布Fig.7 Temporal and spatial distribution of EV
對于私家車,早高峰和晚高峰分別出現(xiàn)在時段07:30—08:30和18:00—19:00;在路徑序號9(節(jié)點3—節(jié)點7)、15(節(jié)點4—節(jié)點14)、46(節(jié)點14—節(jié)點12)和路徑序號22(節(jié)點7—節(jié)點3)、33(節(jié)點10—節(jié)點5)、45(節(jié)點14—節(jié)點4)道路分別出現(xiàn)明顯的早高峰和晚高峰。由于私家車早上出行的時間較為密集,其停留時間分布較為分散,造成早高峰和晚高峰的時刻中前者峰值較為明顯,后者則高峰持續(xù)時間較長。部分道路由于處于區(qū)域中心位置,會同時出現(xiàn)早高峰與晚高峰,如路徑序號41(節(jié)點12—節(jié)點14)和路徑序號46。對于出租車,其出行地點與等待時間隨機性較大,整體會呈現(xiàn)均勻分布。但在路徑序號15和46等區(qū)域中心道路,出租車日分布數(shù)量略高于其他道路。這是由于EV進行路徑抉擇時依據(jù)總行程時長進行行程規(guī)劃轉移,導致EV在快速路與區(qū)域中心路徑易出現(xiàn)集群現(xiàn)象,造成交通擁堵。
3.4 充電負荷時空分布
3.4.1 工作日與非工作日私家車充電負荷對比
圖8為工作日與非工作日的私家車充電負荷曲線。對比可見,在工作日工作區(qū)的私家車充電負荷大于休閑區(qū),非工作日則相反。由于車主在工作日與非工作日具有不同的出行需求,造成了分布上的差異,同時表明上述模型具有適用性,能根據(jù)區(qū)域內車主出行習慣計算得到在不同出行日下的EV充電負荷曲線。另外,私家車的充電行為多集中在返回居民區(qū),且晚高峰EV充電需求較大,這是由于車主下班時間較為固定且集中。根據(jù)3.1節(jié)中充電條件(1),車主在完成一天行程返家后,SOC值低于0.2時,EV有充電需求,因此在居民區(qū)充電的EV數(shù)量大于其他區(qū)域。由圖8可知,工作日居民區(qū)充電負荷峰值比非工作日高13.95%,峰值時刻滯后至20:00。

圖8 充電負荷分析Fig.8 Charging load analysis
3.4.2 區(qū)域充電負荷
充電站依據(jù)EV到站時間作為優(yōu)先級評判標準,對EV進行充電服務。圖9為工作日總充電負荷的時空分布圖。結合圖8,由于私家車返程使充電負荷分布集中在節(jié)點1~6(居民區(qū))和18:00—22:00時段,峰值735 kW出現(xiàn)在21:00時刻。根據(jù)1.1節(jié)中的公交車出行鏈設置節(jié)點16為公交車起始點和返程終點,并使公交車充電聚集在節(jié)點16。由于其往返時間相差不大,該節(jié)點充電負荷集中在20:00—24:00時段,峰值出現(xiàn)在22:00時刻,達到642 kW。充電負荷符合現(xiàn)實生活中EV充電負荷分布的規(guī)律。

圖9 區(qū)域總充電負荷時空分布Fig.9 Temporal and spatial distribution of regional total charging load
3.4.3 私家車與出租車充電負荷對比
由于公交車的充電負荷集中在公交站點,文中只對私家車和出租車的充電行為進行分析。圖10為私家車和出租車的充電負荷時空分布。

圖10 EV充電負荷時空分布Fig.10 Temporal and spatial distribution of EV charging load
由圖10中可以看出私家車充電行為多選擇在上班時的工作區(qū)與返家后的居民區(qū),最大負荷峰值高達644 kW,如不進行有序充、放電會給電網帶來巨大壓力。而出租車的充電行為則根據(jù)車主有充電需求時所處位置,具有很大的隨機性。出租車在區(qū)域中心道路和快速路的兩端節(jié)點如節(jié)點9、11、16進行充電行為的概率大于偏遠節(jié)點,這是由于出租車以出行總時長為依據(jù)進行路徑規(guī)劃轉移,經過位于仿真區(qū)域中心位置道路的概率較大,易在道路兩端就近充電。
4 結論
EV充電負荷時空分布受其自身轉移隨機性影響,難以準確獲取每一輛EV進站充電信息。文中根據(jù)出行特性與車輛類別建立私家車、出租車和公交車3種出行模型。考慮對EV充電負荷分布影響較大的因素,即溫度、行駛路況、擁堵情況,建立EV單位里程能耗模型,并引入MDP理論動態(tài)規(guī)劃EV出行路徑,從而更準確有效地得到區(qū)域內EV時空分布和充電負荷接入充電站數(shù)據(jù)。通過仿真對比得出以下結論:
(1) 計及多耦合因素的動態(tài)規(guī)劃出行路徑相比其他隨機策略能減少單出行鏈時長,能真實反映車主在面臨實時交通情況時調整自身出行的策略。
(2) 相比傳統(tǒng)方法的出行鏈,文中出行鏈基于總出行時長確定節(jié)點間轉移概率,能更合理地得到車主在每個道路節(jié)點的抉擇概率。
(3) 不同出行日下不同區(qū)域充電負荷預測結果與實際情況相符,驗證了文中所提出的方法可以滿足不同場景下的負荷預測,具有普適性。
文中計及耦合因素的EV充電負荷時空分布預測能為后續(xù)研究中的充電站選址定容與EV有序充放電提供數(shù)據(jù)支撐,以便充分利用EV閑置資源緩解電網負荷壓力,實現(xiàn)削峰填谷。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
教學考試(高考化學)(2021年2期)2021-05-30 06:15:52
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
中學生數(shù)理化·高一版(2020年3期)2020-04-21 08:03:20
中學生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
數(shù)學大世界(2018年1期)2018-04-12 05:39:14
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03