存在異步切換的飛行器智能魯棒控制方法研究
2022-05-30 13:48:03劉澤石李思凝張金鵬張曉峰程昊宇
航空兵器 2022年5期
劉澤石 李思凝 張金鵬 張曉峰 程昊宇


摘 要: 針對存在異步切換的飛行器控制器設計問題,提出基于深度強化學習的智能魯棒控制算法。首先,針對飛行器的非線性動力學模型,基于雅克比線性化方法,建立了飛行器的大包線切換系統模型。考慮網絡傳輸丟包引起的異步切換現象,建立控制器和子系統的異步動態模型,在此基礎上,設計了魯棒控制器。基于平均駐留時間方法和多Lyapunov函數方法,分析了系統的穩定性,給出了保證系統穩定且具有給定干擾抑制指標的充分條件。通過線性矩陣不等式給出了控制器的求解方法。進一步,基于深度強化學習對得到的控制器進行優化,在保證系統穩定性和魯棒性的基礎上,提升了系統的動態響應性能。最后,通過仿真驗證了所提方法的有效性。
關鍵詞:切換系統;魯棒控制;智能控制;異步切換;平均駐留時間;深度學習; 飛行器
中圖分類號:TJ765.2;V249.1
文獻標識碼:A
文章編號:1673-5048(2022)05-0035-08
DOI:10.12132/ISSN.1673-5048.2021.0165
0 引? 言
切換系統由一系列子系統和子系統之間的切換邏輯組成,是混雜系統的一個重要分支。切換系統能夠將復雜的非線性系統轉化為一系列線性子系統之間的切換,為復雜高動態非線性系統的建模、分析與控制器設計提供了有效手段。因此,切換系統理論在航空航天、過程控制、機器人控制等領域受到學者的廣泛關注。近年來,學者們針對切換系統的建模、穩定性分析[1-3]、控制器設計[4- 6]、濾波器設計[7-8]、故障檢測[9]和容錯控制[10-11]等方面進行了廣泛深入的研究,取得一系列進展。
大包線飛行器的高度和馬赫數在飛行包線內快速大范圍變化,具有快時變、強非線性等特點,給飛行器的建模和控制器設計帶來諸多挑戰。切換系統作為連接非線性系統和線性系統的橋梁,為模型突變、參數快時變等問題提供了一種可行的解決方案,近年來,受到國內外學者的廣泛關注。文獻[12-13]將變體飛行器的連續變形過程建模為一類切換系統,將后掠角的變化等效為飛行器在子系統中的切換。在建立變體飛行器縱向運動的鏈式平滑切換系統模型基礎上,推導了鏈式平滑系統有限時間有界且具有給定魯棒性指標的充分條件,以線性矩陣不等式的形式給出了控制器的求解方法。文獻[14]將近空間飛行器建模為一系列非線性切換系統,基于反步滑模方法和非線性干擾觀測器設計了魯棒控制器。基于Lyapunov函數方法給出了閉環系統穩定的充分條件,采用變增益控制策略為飛行器不同模態選擇合適的增益。文獻[15]針對變體飛行器變形過程的控制問題,將切換系統理論與多變量自適應控制理論相結合,提出一種基于切換系統的魯棒自適應控制器設計方法,對外界的干擾和不確定性進行補償,基于Lyapunov函數方法分析了系統的穩定性。但是,以上文獻均針對理想信息傳輸情況下的建模和控制器設計問題進行研究,在實際工程應用中,由于網絡帶寬的限制,信號通過網絡進行傳輸時不可避免地會存在數據包丟失現象,引起系統性能下降,甚至發生失穩。文獻[16]考慮測量鏈路和控制鏈路同時存在數據包丟失的現象,將丟包建模為Bernoulli隨機過程,從而得到存在丟包情況下的飛行器切換系統模型。基于模態依賴平均時間方法和多Lyapunov函數方法,設計了魯棒控制器,保證系統的穩
定性和魯棒性。文獻[17]針對存在外部擾動和數據包丟失的情況, 基于狀態反饋設計了魯棒控制器,給出了保證飛行器的有限時間穩定且具有給定性能指標的充分條件。
飛行器在飛行包線內快速大包線飛行,飛行環境復雜,受到外界強干擾和強非線性的影響。另一方面,隨著飛行任務趨于復雜,飛行性能要求提升,這些都對飛行控制系統的魯棒性和動態性能提出了更高的要求。高精度、強魯棒性成為飛行控制系統發展的突出要求。文獻[18]考慮存在時滯的飛行器故障檢測與容錯控制一體化設計問題,針對時滯引起的異步切換現象,基于多Lyapunov-Krarasovskii函數方法和平均駐留時間方法分析了飛行器在異步切換情況下的穩定性和魯棒性,保證故障情況下系統能夠快速有效檢測出故障,并對故障進行補償。文獻[19]針對大包線飛行器的控制問題,設計了局部重疊切換控制系統,提升了系統的魯棒性和動態性能。
隨著計算機計算能力的提升,以深度學習、強化學習為代表的機器學習技術引起了學者的廣泛關注,在圖像識別[20]、目標跟蹤[21]、語音識別[22]和導航制導控制系統設計[23-24]等領域取得一系列突出成就,有效提高了智能化水平。文獻[25]基于狀態反饋設計了控制器,為了提高控制精度,基于深度強化學習算法對控制器參數進行動態調整。文獻[26]則基于深度學習和最優控制,將著陸問題轉化為兩點邊值問題,利用深度學習對不同初值下的最優控制序列進行學習和擬合,兼顧了控制的實時性和最優性。
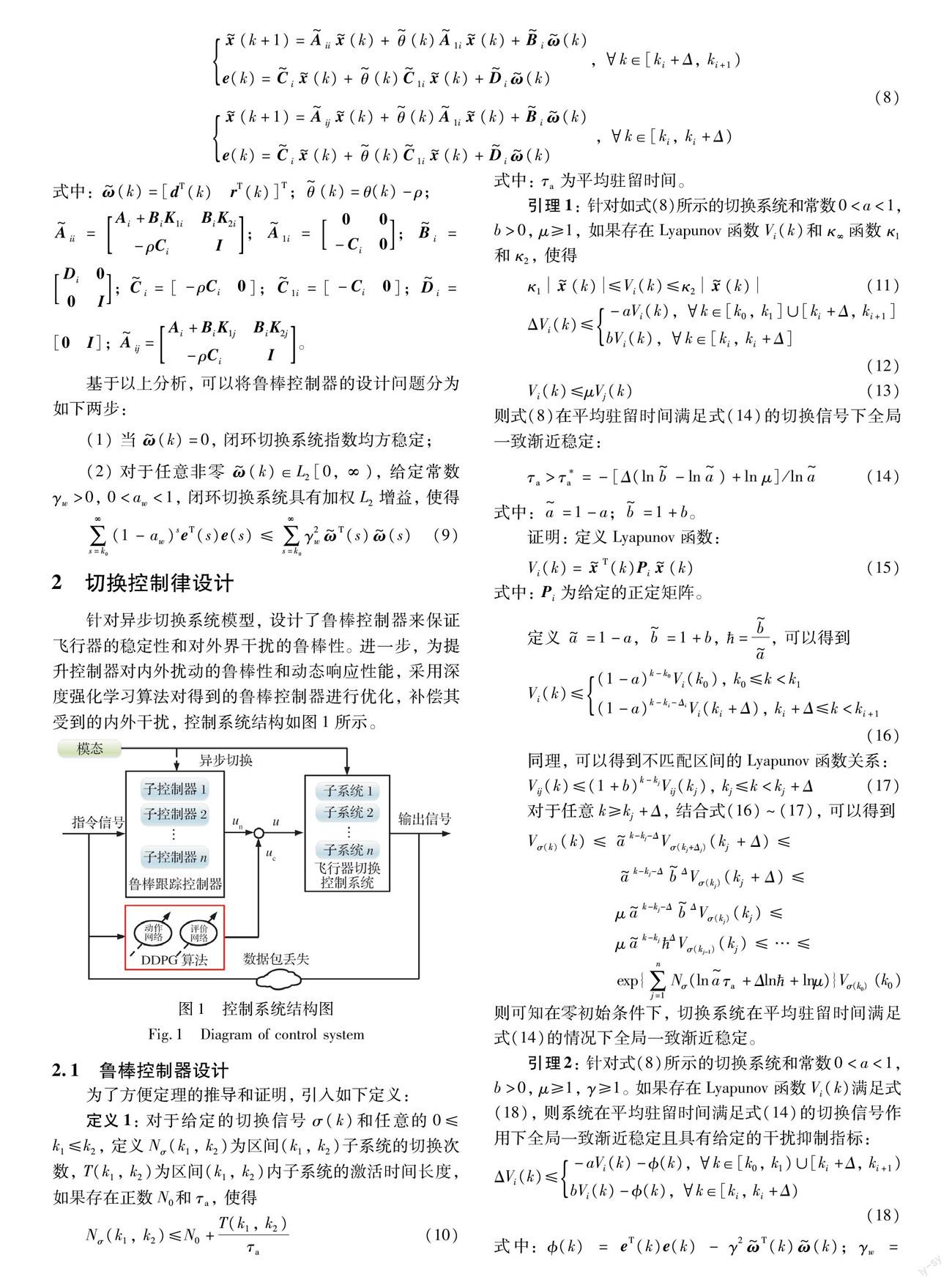
綜上所述,為了提高飛行器控制系統的魯棒性和動態性能,增強其應對環境不確定干擾的能力,本文考慮網絡丟包引起的異步切換現象,在建立飛行器切換系統模型的基礎上,設計了H∞魯棒控制器;基于ADT方法和多Lyapunov函數方法分析了系統的穩定性,并給出保證系統具有給定魯棒性指標的充分條件。進一步,為了提升系統的動態響應性能,基于深度強化學習算法對控制器參數進行優化,有效提升了控制系統的動態性能。
定義系統的丟包率為0.95,最大連續丟包數為5,則由定理3可以得到矩陣U1i,? U2i,? S1i和S2i,進而由式(33)~(34)可以得到魯棒控制器的參數值。以得到的魯棒控制器參數為基準參數,基于DDPG算法對控制器進行優化。深度神經網絡均采用全連接的方式連接,其激活函數定義為ReLu,動作網絡和評價網絡的學習率為0.001,獎勵函數的權重系數為λ1=0.8,λ2=0.2,執行機構的飽和值u-a=15°,懲罰值u-p=200,可以得到仿真結果如圖3~8所示。圖中,“DRobust”表示本文提出
的智能魯棒控制算法, “Robust”代表傳統魯棒控制方法。
圖3~4為攻角跟蹤信號和跟蹤誤差,從圖中可以看出,經過深度強化學習對魯棒控制器參數進行優化,在保證閉環系統穩定的前提下,有效減小了系統在切換時刻的跟蹤誤差和穩態誤差,提升了控制系統的閉環響應性能。圖5為俯仰角速率響應曲線,從圖中可以看出,俯仰角速率沒有發生飽和。圖6~8分別表示升降舵、副翼和鴨翼響應曲線,從圖中可以看出,執行機構的響應曲線沒有超過物理限制,能夠執行控制系統指令。圖9為獎勵函數響應曲線,反映了本文提出的深度強化學習算法具有良好的跟蹤性能。
綜上所述,本文所提的算法能夠在傳統魯棒控制方法的基礎上,利用DDPG算法提高閉環系統的動態響應性能,兼顧了系統的穩定性、魯棒性和動態性能。
4 結? 論
本文針對飛行器的智能魯棒控制問題進行研究,基于非線性動力學模型得到面向飛行器大包線飛行的切換系統模型。考慮數據包丟失引起的異步切換現象,設計了智能魯棒控制器。控制器的設計分魯棒跟蹤控制器和智能控制器兩部分。其中,基于多Lyapunov函數方法和平均駐留時間方法保證閉環系統穩定且具有給定的干擾抑制指標,通過線性矩陣不等式給出了魯棒控制器的求解方法。為了提升控制系統的動態性能和抗干擾能力,基于深度強化學習設計了智能控制器,對內外干擾進行補償以提升控制器的動態性能。基于actor-critic框架提出DDPG算法,在魯棒控制器設計的基礎上進行優化,有效保證了整個控制器的穩定性、魯棒性和動態性能。
參考文獻:
[1] Wang Z Y,? Gao L J,? Liu H Y. Stability and Stabilization of Impulsive Switched System with Inappropriate Impulsive Switching Signals under Asynchronous Switching[J]. Nonlinear Analysis: Hybrid Systems,? 2021,? 39: 100976.
[2] Liu Z,? Zhang X F,? Lu X D,? et al. Stabilization of Positive Switched Delay Systems with All Modes Unstable[J]. Nonlinear Analysis: Hybrid Systems,? 2018,? 29: 110-120.
[3] Hong S S,? Zhang Y. Input/Output-to-State Stability of Impulsive Switched Delay Systems[J]. International Journal of Robust and Nonlinear Control,? 2019,? 29(17): 6031-6052.
[4] Zheng Y,? Wang Y N. Full-Order and Reduced-Order l1 Filtering for Positive Switched Delay Systems under the Improved MADT[J]. Nonlinear Analysis: Hybrid Systems,? 2019,? 32: 147-156.
[5] Zhong G X,? Yang G H. Dynamic Output Feedback Control of Saturated Switched Delay Systems under the PDT Switching[J]. International Journal of Robust and Nonlinear Control,? 2017,? 27(15): 2567-2588.
[6] Zhu C H,? Li X D,? Cao J D. Finite-Time H∞ Dynamic Output Feedback Control for Nonlinear Impulsive Switched Systems[J]. Nonlinear Analysis: Hybrid Systems,? 2021,? 39: 100975.
[7] Park J H,? Mathiyalagan K,? Sakthivel R. Fault Estimation for Discrete-Time Switched Nonlinear Systems with Discrete and Distributed Delays[J]. International Journal of Robust and Nonlinear Control,? 2016,? 26(17): 3755-3771.
[8] Liu H Y,? Gao L J,? Wang Z Y,? et al. Asynchronous l2-l∞ Filtering of Discrete-Time Impulsive Switched Systems with Admissible Edge-Dependent Average Dwell Time Switching Signal[J]. International Journal of Systems Science,? 2021,? 52(8): 1564-1585.
[9] Zhang M,? Shi P,? Shen C,? et al. Static Output Feedback Control of Switched Nonlinear Systems with Actuator Faults[J]. IEEE Transac-tions on Fuzzy Systems,? 2020,? 28(8): 1600-1609.
[10] Yin Y H,? Wang F Y,? Liu Z X,? et al. Fault-Tolerant Consensus for Switched Multiagent Systems with Input Saturation[J]. International Journal of Robust and Nonlinear Control,? 2021,? 31(11): 5047-5068.
[11] Wang Y Q,? Xu N,? Liu Y J,? et al. Adaptive Fault-Tolerant Control for Switched Nonlinear Systems Based on Command Filter Technique[J]. Applied Mathematics and Computation,? 2021,? 392: 125725.
[12] 江未來,? 董朝陽,? 王通,? 等. 變體飛行器平滑切換LPV魯棒控制[J]. 控制與決策,? 2016,? 31(1): 66-72.
Jiang Weilai,? Dong Chaoyang,? Wang Tong,? et al. Smooth Switch-ing LPV Robust Control for Morphing Aircraft[J]. Control and Decision,? 2016,? 31(1): 66-72.(in Chinese)
[13] 王青,? 王通,? 董朝陽,? 等. 變體飛行器鏈式平滑切換控制[J]. 控制理論與應用,? 2015,? 32(7): 949-954.
Wang Qing,? Wang Tong,? Dong Chaoyang,? et al. Chained Smooth Switching Control for Morphing Aircraft[J]. Control Theory & Applications,? 2015,? 32(7): 949-954.(in Chinese)
[14] 路遙,? 董朝陽,? 王青,? 等. 近空間飛行器變增益非線性切換控制器設計[J]. 控制與決策,? 2017,? 32(4): 613-618.
Lu Yao,? Dong Chaoyang,? Wang Qing,? et al. Variable Gain Nonlinear Switching Controller Design for Near Space Vehicles[J]. Control and Decision,? 2017,? 32(4): 613-618.(in Chinese)
[15] 梁小輝,? 王青,? 董朝陽. 基于切換系統的變體飛行器魯棒自適應控制[J]. 北京航空航天大學學報,? 2019,? 45(3): 538-545.
Liang Xiaohui,? Wang Qing,? Dong Chaoyang. Robust Adaptive Control for Morphing Aircraft Based on Switching System[J]. Journal of Beijing University of Aeronautics and Astronautics,? 2019,? 45(3): 538-545.(in Chinese)
[16] Cheng H Y,? Dong C Y,? Jiang W L,? et al. Non-Fragile Switched H∞ Control for Morphing Aircraft with Asynchronous Switching[J]. Chinese Journal of Aeronautics,? 2017,? 30(3): 1127-1139.
[17] Cheng H Y,? Fu W X,? Dong C Y,? et al. Asynchronously Finite-Time H∞ Control for Morphing Aircraft[J]. Transactions of the Institute of Measurement and Control,? 2018,? 40(16): 4330-4344.
[18] 程昊宇,? 董朝陽,? 江未來,? 等. 變體飛行器故障檢測與容錯控制一體化設計[J]. 兵工學報,? 2017,? 38(4): 711-721.
Cheng Haoyu,? Dong Chaoyang,? Jiang Weilai,? et al. Integrated Fault Detection and Fault Tolerant Control for Morphing Aircraft[J]. Acta Armamentarii,? 2017,? 38(4): 711-721.(in Chinese)
[19] Yang H,? Guan Y C,? Ma Y J,? et al. Overlapping-Decomposition-Based Control Design for Switched Full-Envelope Flight[J]. Journal of Guidance,? Control,? and Dynamics,? 2018,? 41(12): 2658-2665.
[20] 付哲泉,? 李相平,? 李尚生,? 等. 深度學習在雷達目標高分辨距離像識別中的研究綜述[J]. 航空兵器,? 2020,? 27(3): 37-43.
Fu Zhequan,? Li Xiangping,? Li Shangsheng,? et al. Review of Radar HRRP Target Recognition Based on Deep Learning[J]. Aero Weaponry,? 2020,? 27(3): 37-43.(in Chinese)
[21] Munjani J,? Joshi M. A Non-Conventional Lightweight Auto Regressive Neural Network for Accurate and Energy Efficient Target Tracking in Wireless Sensor Network[J]. ISA Transactions,? 2021,? 115: 12-31.
[22] 薛艷飛,? 毛啟容,? 張建明. 基于多任務學習的多語言語音情感識別方法[J]. 計算機應用研究,? 2021,? 38(4): 1069-1073.
Xue Yanfei,? Mao Qirong,? Zhang Jianming. Multi-Language Speech Emotion Recognition Based on Multi-Task Learning[J]. Application Research of Computers,? 2021,? 38(4): 1069-1073.(in Chinese)
[23] Li R F,? Hu L,? Cai L. Adaptive Tracking Control of a Hypersonic Flight Aircraft Using Neural Networks with Reinforcement Synthesis[J]. Aero Weaponry,? 2018(6): 3-10.
[24] Gaudet B,? Linares R,? Furfaro R. Deep Reinforcement Learning for Six Degree-of-Freedom Planetary Landing[J]. Advances in Space Research,? 2020,? 65(7): 1723-1741.
[25] Xu J,? Hou Z M,? Wang W,? et al. Feedback Deep Deterministic Policy Gradient with Fuzzy Reward for Robotic Multiple Peg-in-Hole Assembly Tasks[J]. IEEE Transactions on Industrial Informatics,? 2019,? 15(3): 1658-1667.
[26] Sánchez-Sánchez C,? Izzo D. Real-Time Optimal Control via Deep Neural Networks: Study on Landing Problems[J]. Journal of Guidance,? Control,? and Dynamics,? 2018,? 41(5): 1122-1135.
Intelligent Robust Control for Flight Vehicles with
Asynchronous Switching
Liu Zeshi1*,Li Sining1,Zhang Jinpeng2,Zhang Xiaofeng3,? Cheng Haoyu3
(1. Shenyang Aircraft Design Institute, Shenyang 110035, China;2. China Airborne Missile Academy,? Luoyang 471009, China;
3. Northwestern Polytechnical University,? Xian 710072, China)
Abstract: The problem of intelligent robust controller design for flight vehicles with asynchronous switching is investigated based on deep reinforcement learning. The switched model of flight vehicle in full envelope is established based on Jacobian linearization according to the nonlinear dynamic model. The asynchronous switching caused by packet loss are taken into consideration and the asynchronous dynamic? model of controllers and subsystems are introduced. Then the robust controller is provided.
The stability of the system is analyzed, and the sufficient conditions to ensure the stability with prescribed interference suppression index are given based on average dwell time method and multiple Lyapunov functional method. The solutions of controllers are obtained by linear matrix inequality. Moreover,? the obtained controller is optimized based on deep reinforcement learning, and the dynamic response performance of the system is improved while ensuring the stability and robustness.
Numerical examples in the end are given to illustrate the effectiveness of the proposed method.
Key words:? switching system;robust control;intelligent control;asynchronous switching;average dwell time;deep learning;flight vehicle
收稿日期: 2021-08-27
基金項目:航空科學基金項目(20180153001;201907053001)
作者簡介:劉澤石(1989-),男,遼寧沈陽人,碩士研究生,高級工程師。
猜你喜歡
電子技術與軟件工程(2016年20期)2016-12-21 11:36:49
江蘇教育·中學教學版(2016年11期)2016-12-21 11:36:29
電子技術與軟件工程(2016年20期)2016-12-21 11:00:56
計算機教育(2016年10期)2016-12-19 12:15:52
現代情報(2016年10期)2016-12-15 11:50:53
新教育時代·教師版(2016年23期)2016-12-06 06:02:38
法制與社會(2016年32期)2016-12-01 15:25:53
演藝科技(2016年10期)2016-11-26 22:11:21
軟件導刊(2016年9期)2016-11-07 22:20:49
軟件工程(2016年8期)2016-10-25 15:47:34
