無人機傾斜攝影技術在地理信息獲取中的應用
2022-05-30 15:11:25陳陳唐明軍張旭
品牌與標準化 2022年2期
關鍵詞:無人機
陳陳 唐明軍 張旭

【摘要】隨著科技的不斷發展,無人機傾斜攝影技術也得到廣泛的應用,尤其是在測繪、地理信息安全、城市空間信息獲取等領域。傾斜攝影技術不僅能夠從垂直角度拍攝,還能從四個傾斜角度進行拍攝,使拍攝的事物更加實際化,極大地彌補了傳統正射影像只能垂直拍攝的缺點,其優越的靈活性和技術的先進性從根本上將測量精度提升。基于此,本文探討了基于無人機傾斜攝影技術的地理信息獲取和原始影像的處理方法,希望能夠為相關研究提供借鑒。
【關鍵詞】無人機;傾斜攝影;測量精度
【DOI 編碼】10.3969/j.issn.1674-4977.2022.02.024
Application of UAV Tilt Photography Technology in Geographic Information Acquisition
CHEN Chen1,TANG Ming-jun1,ZHANG Xu2
(1. School of Information Engineering,Yangzhou Vocational and Technical College of Industry,Yangzhou 225000,China 2.Zhongtong Service Consulting Design and Research Institute Co.,Ltd.,Nanjing 211100,China)
Abstract:With the continuous development of science and technology,UAV tilt photography technology has also been widely used,especially in the fields of surveying and mapping,geographic information security,urban spatial information acquisition and so on. Oblique photography technology can not only shoot from a vertical angle,but also from four oblique angles,making the things photographed more practical. It greatly makes up for the shortcomings of traditional orthophotos that can only be shot vertically,and its superior flexibility and technological advancement will fundamentally improve the measurement accuracy. Based on this,this article discusses the method of geographic information acquisition and original image processing based on drone tilt photography technology,hoping to provide a reference for related research.
Key words:unmanned aerial vehicle;tilt photography;measurement accuracy
無人機傾斜攝影技術的應用為我國大比例尺地圖的測繪、數字城市建設、地籍測量、高精度地理信息獲取等領域做出了卓越的貢獻。在無人機測量技術應用中,傳統的航空航天攝影測量技術采用垂直角度攝影,一般只針對測量對象頂部進行測量,測量時受外界影響較大,具有一定的局限性,對一些地勢起伏較為明顯的地區或者地面物體側面的紋理信息很難獲取。近年來,國外技術團隊針對傳統無人機拍攝存在的問題開發了傾斜攝影測量這一新技術。傾斜攝影測量技術[1]以多角度、高清晰拍攝的優勢可以非常迅速全面地感知各種復雜場景,并且可以實現多臺無人機協同并行工作,具有極強的靈活性,在建筑物較多的城市和地勢起伏明顯的地區,可以利用傾斜攝影測量技術進行空間地理信息獲取。隨著我國城市化進程的快速推進,高精度的城市空間信息數據在城市規劃和建設中變得尤為重要。在高精度城市空間信息數據的獲取中,傾斜攝影測量技術得到了廣泛的應用并逐漸成為關鍵技術。
1無人機傾斜攝影技術在高精度地理信息獲取應用中的優勢
在實際測繪中,由于人工測繪的局限性會導致地形觀察出錯,并且在測量過程中需要消耗大量的時間和精力,測繪的精度也難以保證。而應用無人機傾斜攝影技術結合測繪軟件,可以更好更快地完成測繪工作。同時利用空中三角測量技術,可以更快更清晰地得到測繪區域的實際情況,并且能夠獲取拍攝物的表面紋理信息和建筑物外層細節信息,極大地豐富了影像數據源信息。
2基于無人機傾斜攝影技術的高精度地理信息獲取方法研究
2.1特征線提取中的直線分段效應改善
相機的CCD感光響應差異或在拍攝過程中出現的干擾物,會造成原始影像在某一小范圍的像素值出現異常,使圖像中的長直線被斷開,出現多個短線段。在目前圖形特征線提取方法中一般采用直線提取算法,而由于原始影像中的短線效應,直線提前算法幾乎都存在分段現象,而且短線段數量較多,長度較短,不易提取。
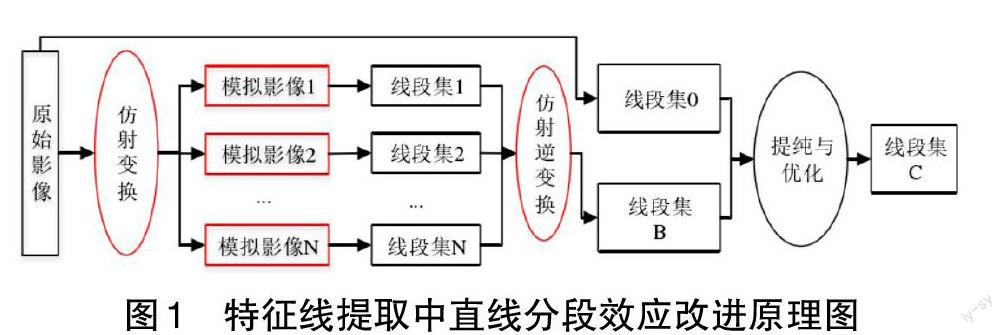
單張影像是沒有辦法消除相機的CCD感光缺陷或拍攝中干擾物造成的原始影像中的短線效應。要想在圖形特征線提取中不借助外界輔助手段獲取更長、更有用的直線段,就需要用一種改善特征線提取中的直線分段效應方法。如圖1所示。
具體操作原理為:1)首先利用仿射相機模擬不同視角下的仿射投影,通過仿射變換矩陣,得到1—N等一系列模擬影像;2)對模擬影像1、模擬影像2,直至模擬影像N,以及原始影像直線提取,得到對應的線段集1—N以及線段集0。然后將線段集1-N通過仿射逆變換矩陣反投影至原始影像上,并得到線段集B;3)對以上獲得的線段集0和線段集B中的線段提純與優化,以原始影像中的第一條線段為參考,將直線提取中由于短線效應產生的短線段剔除、連接與合并,從而獲得想要得到的更長、更有效的長線段。
2.2基于POS輔助的影像不變特征寬基線影像匹配方法
在基于無人機傾斜攝影技術的高精度地理信息測量中,影像匹配一直是其研究的難點與重點。尤其是在寬基線情況下的立體影像處理問題,考慮到視角變化的因素夾雜其中,要遠比短基線的情況下復雜得多。由于一般無人機在攝影過程中往往都會攜帶配套的POS數據,鑒于此,本文提出了兩種基于以上問題的特征線匹配方法,并在解決其視點角度變化的問題上對其作出對比。
1)仿射投影模型下的寬基線影像直線匹配方法
根據其POS系統提供的定位姿態信息,求出仿射投影矩陣,進行仿射投影模型下的影像糾正,以減小影像間視角差異;對原始矩形影像糾正后的平行四邊形進行直線匹配,得到匹配直線對;利用仿射投影矩陣對匹配直線對做逆變換,得出原始傾斜影像的匹配直線對。
2)透視投影模型下的寬基線影像直線匹配方法
根據無人機POS系統提供的高精度位置與定位姿態信息,恢復觀測瞬間成像平面與物方平面的透視變換關系,并建立透視變換矩陣,將原始影像重新投影糾正至新的平面,得到正形影像,以消除視點角度變化較大導致的透視變形;將原始圓影像糾正后的橢圓影像直線匹配,然后將反投影得到的匹配線段逆變換至原始影像,最終達到更優化的效果。
2.3基于點線混合光束法平差的相機位姿自動估計
當前,對于該問題最新的相機位姿求解算法是基于建筑物的邊緣線,同時其精度也相對較低。針對以上算法中的缺點,本文提出的基于點線混合光束法平差的相機位姿自動估計方法,有效規避了以上缺陷,并且具有很高的可靠度。其具體算法如下:用兩個相機中心點穿過兩個平面在物方空間中建立世界三維坐標系,將兩個平面的法向量分別寫作對應的方位角與高程角的函數方程式,然后用其叉積表示3D線的方向向量。基于3D線與Z軸的叉積與點積分別為零向量,來創建水平和垂直線約束的觀測方程,將該方程導入文章提出的新的算法模型,同時也包含了觀察到的像點以及線段投影。
2.4三維線段輔助下正射影像的建筑物邊緣結構優化
當前,在利用無人機的攝影測量技術生成的數字地表模型中,雖然影像匹配得到了海量點云,大大提高了地理信息的描述精度。但與此同時,其帶來的密集點云也包含了大量的沉臃數據。這些點云數據對于正射影像生成的三角網的構建完全是無用的,不但增加了數據儲存與計算的運算量,還不利于進行數據處理。同時,海量的點云不僅分布無序,還包含有許多含有噪聲點的異常點云,如果不進行抽稀剔除,會導致建筑物的邊緣結構存在嚴重的鋸齒扭曲現象。
因此,在生產制作城市的正射影像產品時,由于城市建筑物密集,且存在明顯的高程起伏,這種建筑物邊緣結構的鋸齒失真將表現得更為顯著。所以,基于這一現象,可以通過精確重建優質三維線段的方法對以上鋸齒失真進行改良。首先根據上文直線提取和匹配的方法,得到影像中同一建筑物邊緣的同名直線;根據點線混合光束法平差后得到相機位姿信息,通過三維重建和端點約束得到相應的三維線段;然后通過得到的三維線段的點云參與不規則三角網構建,來改善建筑物邊緣的網形,使重新得到的影像建筑物邊緣獲得優化。
2.5空洞邊界檢測提取與修補
由于傾斜攝影測量的對象多為城市建筑和地貌山型,對象較大且復雜,一般采用基于網格模型的空洞修復技術來實現最大限度地保持原型,而基于體素方法的空洞修補算法只能夠修復重建物體表面的小孔洞,不適合大體量的修復,并且在修復過程中容易帶來幾何形變,因此可以排除。
要實現空洞修復,首先需要完成的是對空洞邊界的提取。由于傾斜攝影測量構建的一般都是體量較大的模型,所以在對這些模型進行三角網格化過程中產生的三角網格的數量也較多,無法實現人工提取,因此需要進行自動提取。這里可以充分利用OpenMesh庫來完成,在修補的過程中,先將其加載的三角網格信息采用半邊數據結構進行存儲;然后依次尋找到三角網格信息中的邊,將這些邊采用首尾相連的方式連接起來,最終形成一個完全閉合的多邊形,在將邊連接的過程中會產生節點,對這些節點一次進行排序Al、A2、A3,記錄這些邊的信息以及所屬面和節點信息;接下來需要判斷出空洞區域和三角面片,如果面由三個以上的半邊進行同方向循環,那這個面就是空洞區域,否則為三角面片,將屬于空洞區域的半邊連接就構成一個空洞半邊多邊形,最終形成新的三角網格模型空洞,如圖2所示。
采用OpenMesh庫對三角網格模型的空洞進行填補,在完成空洞邊界的提取工作后,由于在空洞邊緣的三角網格的分布不均勻,并且存在較多的窄長三角面片,文中采用了OpenMesh庫對三角網格模型的空洞進行填補,填補過后會生成Delaunay三角網,Delaunay三角網最大的特性是最小內角最大化和最大外接圓最小,而空洞邊緣的窄長三角形很明顯不符合其性質,如果繼續進行修補,就會造成最終三角網格的三角網疏密程度不一致,因此需要對提取出來的空洞邊界進行優化,即對空洞邊界預處理。這里可以將空洞邊界區域的窄長三角形進行拆分,最終讓填補區域邊緣三角面片能夠更好地進行光滑拼合,使三角面片的形狀更優,并且三角網格的疏密程度趨于正常。
3結語
綜上所述,本文圍繞傾斜攝影技術的優勢,針對無人機傾斜影像的直線提取、線段匹配等問題進行探討,并提出了相應的技術改善方法。通過以上問題的研究和新技術、新算法的應用,可以使無人機傾斜攝影技術在高精度地理信息獲取中發揮最大優勢,并提高無人機傾斜攝影測量的可靠程度,使該項技術在我國城市測繪和城市建設中真正得到推廣和普及應用。
【參考文獻】
[1]江明明.基于傾斜攝影測量技術的三維數字城市建模[J].測繪與空間地理信息,2017,40(3):189-190.
[2]劉輝,張富文,鄭士舉,等.無人機傾斜攝影測量技術在建筑測繪中的應用研究[J].建筑科技,2018,2(6):64-67.
[3]陳科羽,陳鳳翔,曾華榮,等.無人機傾斜攝影技術的應用[J].電子技術與軟件工程,2019(14):106-108.
[4]王德高.基于無人機傾斜攝影測量的大比例尺測圖技術研究[J].遼寧科技學院學報,2018,20(3):15-17.
[5]曹瀟雷.無人機傾斜攝影測量在高山地區的三維建模研究[D].昆明:昆明理工大學,2020.
猜你喜歡
電腦知識與技術(2016年28期)2016-12-21 12:21:32
電子技術與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時代·教師版(2016年27期)2016-12-06 18:14:59
中國科技縱橫(2016年17期)2016-11-30 11:51:57
農機使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業導報(2016年9期)2016-05-26 20:58:26
