分析圖像識(shí)別技術(shù)在零件裝配自動(dòng)識(shí)別中的應(yīng)用
2022-06-03 12:48:35張曉棟
電腦知識(shí)與技術(shù) 2022年8期
張曉棟
摘要:該文簡(jiǎn)要介紹了圖像識(shí)別技術(shù)的程序組成與識(shí)圖功能,分別從圖像濾波、圖像分割、特征歸納、位置確定等視角,詳細(xì)解析了零件識(shí)圖程序的運(yùn)行過程,采取實(shí)驗(yàn)形式驗(yàn)證此種識(shí)圖方式的可操作性。
關(guān)鍵詞:零件;閾值;圖像識(shí)別技術(shù)
中圖分類號(hào):TP3? ? ? ? 文獻(xiàn)標(biāo)識(shí)碼:A
文章編號(hào):1009-3044(2022)08-0065-02
在原有裝配生產(chǎn)體系中,裝配智能程序的各項(xiàng)操作采取預(yù)設(shè)計(jì)形式,完成固定操作的生產(chǎn)程序編輯,借助傳感器增強(qiáng)生產(chǎn)控制效果。在裝配時(shí)完成各類操作程序設(shè)定,確保零件、包裝箱等要素位置的精準(zhǔn)性,以期獲取高性能零件產(chǎn)品。
1技術(shù)概述
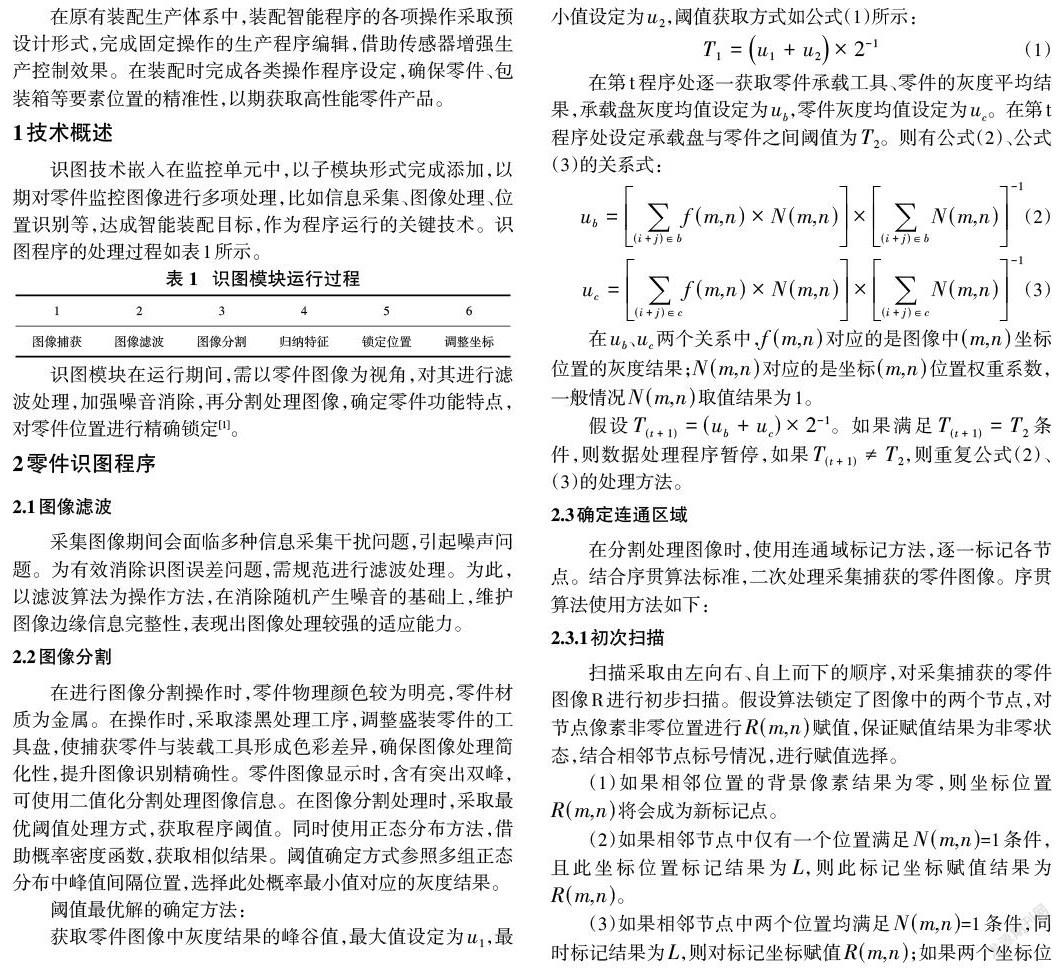
識(shí)圖技術(shù)嵌入在監(jiān)控單元中,以子模塊形式完成添加,以期對(duì)零件監(jiān)控圖像進(jìn)行多項(xiàng)處理,比如信息采集、圖像處理、位置識(shí)別等,達(dá)成智能裝配目標(biāo),作為程序運(yùn)行的關(guān)鍵技術(shù)。識(shí)圖程序的處理過程如表1所示。
識(shí)圖模塊在運(yùn)行期間,需以零件圖像為視角,對(duì)其進(jìn)行濾波處理,加強(qiáng)噪音消除,再分割處理圖像,確定零件功能特點(diǎn),對(duì)零件位置進(jìn)行精確鎖定[1]。
2零件識(shí)圖程序
2.1圖像濾波
采集圖像期間會(huì)面臨多種信息采集干擾問題,引起噪聲問題。為有效消除識(shí)圖誤差問題,需規(guī)范進(jìn)行濾波處理。為此,以濾波算法為操作方法,在消除隨機(jī)產(chǎn)生噪音的基礎(chǔ)上,維護(hù)圖像邊緣信息完整性,表現(xiàn)出圖像處理較強(qiáng)的適應(yīng)能力。
2.2圖像分割
在進(jìn)行圖像分割操作時(shí),零件物理顏色較為明亮,零件材質(zhì)為金屬。在操作時(shí),采取漆黑處理工序,調(diào)整盛裝零件的工具盤,使捕獲零件與裝載工具形成色彩差異,確保圖像處理簡(jiǎn)化性,提升圖像識(shí)別精確性。零件圖像顯示時(shí),含有突出雙峰,可使用二值化分割處理圖像信息。在圖像分割處理時(shí),采取最優(yōu)閾值處理方式,獲取程序閾值。同時(shí)使用正態(tài)分布方法,借助概率密度函數(shù),獲取相似結(jié)果。閾值確定方式參照多組正態(tài)分布中峰值間隔位置,選擇此處概率最小值對(duì)應(yīng)的灰度結(jié)果。
閾值最優(yōu)解的確定方法:
2.3確定連通區(qū)域
在分割處理圖像時(shí),使用連通域標(biāo)記方法,逐一標(biāo)記各節(jié)點(diǎn)。結(jié)合序貫算法標(biāo)準(zhǔn),二次處理采集捕獲的零件圖像。序貫算法使用方法如下:
2.3.1初次掃描
掃描采取由左向右、自上而下的順序,對(duì)采集捕獲的零件圖像R進(jìn)行初步掃描。假設(shè)算法鎖定了圖像中的兩個(gè)節(jié)點(diǎn),對(duì)節(jié)點(diǎn)像素非零位置進(jìn)行[R(m,n)]賦值,保證賦值結(jié)果為非零狀態(tài),結(jié)合相鄰節(jié)點(diǎn)標(biāo)號(hào)情況,進(jìn)行賦值選擇。
(1)如果相鄰位置的背景像素結(jié)果為零,則坐標(biāo)位置[R(m,n)]將會(huì)成為新標(biāo)記點(diǎn)。
(2)如果相鄰節(jié)點(diǎn)中僅有一個(gè)位置滿足[N(m,n)]=1條件,且此坐標(biāo)位置標(biāo)記結(jié)果為[L],則此標(biāo)記坐標(biāo)賦值結(jié)果為[R(m,n)]。
(3)如果相鄰節(jié)點(diǎn)中兩個(gè)位置均滿足[N(m,n)]=1條件,同時(shí)標(biāo)記結(jié)果為[L],則對(duì)標(biāo)記坐標(biāo)賦值[R(m,n)];如果兩個(gè)坐標(biāo)位置標(biāo)記結(jié)果分別為[I]與[J],則采取標(biāo)記合并處理,進(jìn)行標(biāo)號(hào)存儲(chǔ)時(shí),采取等價(jià)處理方式,將坐標(biāo)存儲(chǔ)在獨(dú)立的數(shù)據(jù)表中,相同價(jià)表中含有的各類連通成分均被標(biāo)記了唯一碼。
2.3.2二次掃描
在等價(jià)結(jié)果中,選擇其中一個(gè)節(jié)點(diǎn)進(jìn)行標(biāo)記處理,同時(shí)對(duì)連通域中各節(jié)點(diǎn)分配標(biāo)號(hào)。一般情況下,一個(gè)連通域會(huì)獲得較小的標(biāo)記結(jié)果。二次掃描中保證每個(gè)連通域獲得了分配碼具有唯一性。在分割處理零件采集圖像時(shí),使用二值化分割方法,加強(qiáng)區(qū)域閾值消除環(huán)境噪音,再使用序貫算法對(duì)圖像進(jìn)行標(biāo)記處理,各類連通域逐一完成標(biāo)記[2]。
2.4歸納零件特征
一定數(shù)量的零件,外觀形狀以圓形、方形為表現(xiàn)形式,具有幾何外觀的簡(jiǎn)易性。因此,借助零件外觀特征,進(jìn)行零件特征識(shí)圖分析。在識(shí)圖分析時(shí),使用圓形、方形兩種零件的外觀特點(diǎn),比如圓形弧度、矩形角度、幾何面積、圓形外周長(zhǎng)等。充分借助零件自身表現(xiàn)出的幾何外觀特點(diǎn),減少樣本訓(xùn)練問題,提升特征匹配識(shí)別準(zhǔn)確性。零件特征定義方式,具體表現(xiàn)為:
(1)幾何面積S:[S=m=0j-1n=0i-1b[m,n]]。
(2)幾何周長(zhǎng)C:以目標(biāo)零件區(qū)域?yàn)橐暯牵瑴y(cè)定各像素外圍長(zhǎng)度。
(3)圓形弧度E:[E=4πS×(C2)-1]。
(4)矩形角度K:[K=S×(Sk)-1]。其中[Sk]表示矩形面積的最小值。
如表2所示,為某裝配廠選出的目標(biāo)零件特征分析結(jié)果。
在識(shí)別零件幾何特征期間,以定位算法為切入點(diǎn),優(yōu)先獲取幾何區(qū)域中心值,同時(shí)結(jié)合零件標(biāo)準(zhǔn)圖的具體情況,進(jìn)行圖像匹配,獲得初步圖像匹配結(jié)果。獲取零件特征的方法,分別使用幾何面積、幾何周長(zhǎng)等特征項(xiàng),精細(xì)匹配目標(biāo)零件。使用圖像匹配方法,具有圖像識(shí)別高效性,順應(yīng)智能在線識(shí)圖操作需求,同時(shí)保證匹配質(zhì)量[3]。
2.5鎖定零件位置
2.5.1確定零件坐標(biāo)信息
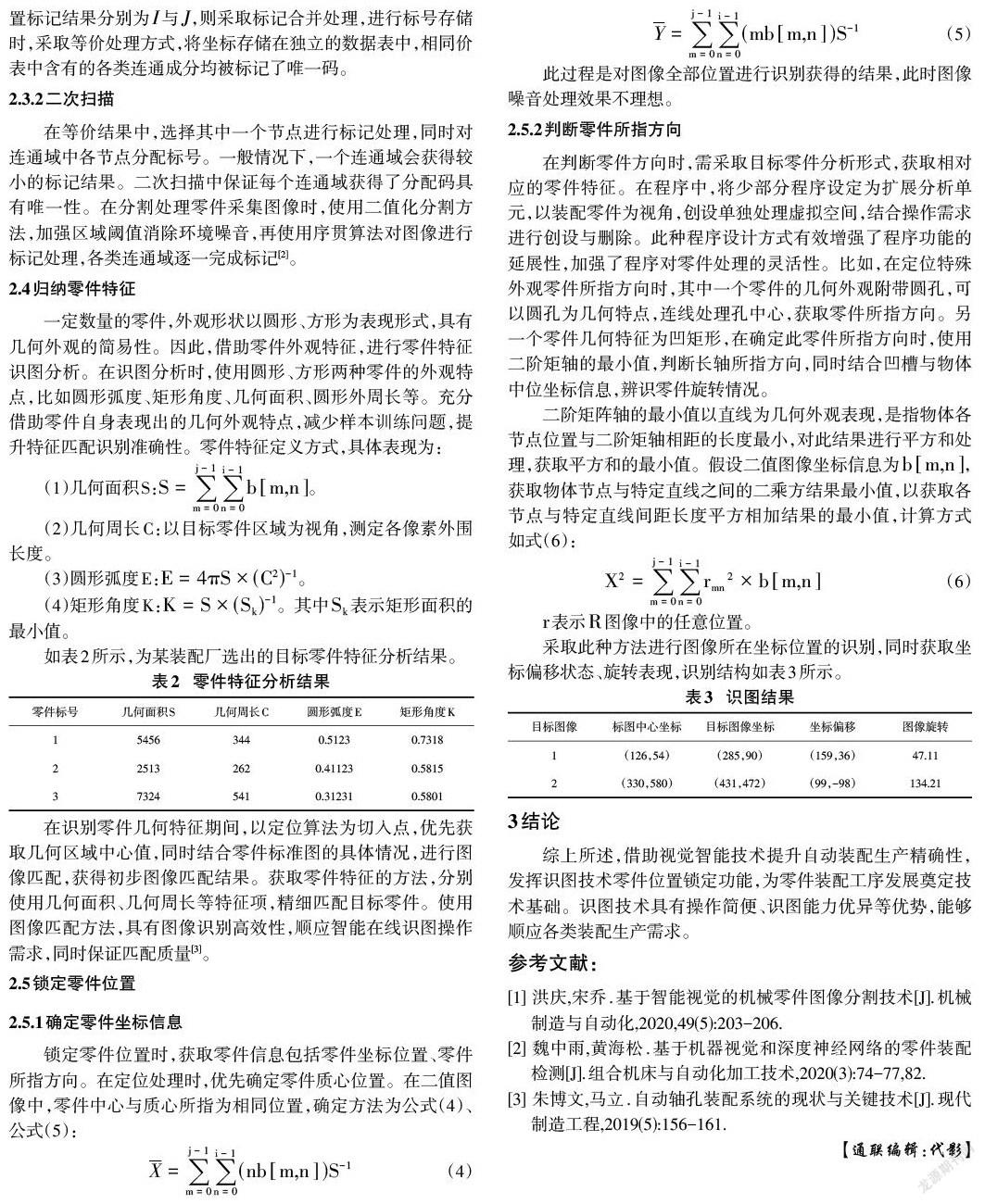
鎖定零件位置時(shí),獲取零件信息包括零件坐標(biāo)位置、零件所指方向。在定位處理時(shí),優(yōu)先確定零件質(zhì)心位置。在二值圖像中,零件中心與質(zhì)心所指為相同位置,確定方法為公式(4)、公式(5):
此過程是對(duì)圖像全部位置進(jìn)行識(shí)別獲得的結(jié)果,此時(shí)圖像噪音處理效果不理想。
2.5.2判斷零件所指方向
在判斷零件方向時(shí),需采取目標(biāo)零件分析形式,獲取相對(duì)應(yīng)的零件特征。在程序中,將少部分程序設(shè)定為擴(kuò)展分析單元,以裝配零件為視角,創(chuàng)設(shè)單獨(dú)處理虛擬空間,結(jié)合操作需求進(jìn)行創(chuàng)設(shè)與刪除。此種程序設(shè)計(jì)方式有效增強(qiáng)了程序功能的延展性,加強(qiáng)了程序?qū)α慵幚淼撵`活性。比如,在定位特殊外觀零件所指方向時(shí),其中一個(gè)零件的幾何外觀附帶圓孔,可以圓孔為幾何特點(diǎn),連線處理孔中心,獲取零件所指方向。另一個(gè)零件幾何特征為凹矩形,在確定此零件所指方向時(shí),使用二階矩軸的最小值,判斷長(zhǎng)軸所指方向,同時(shí)結(jié)合凹槽與物體中位坐標(biāo)信息,辨識(shí)零件旋轉(zhuǎn)情況。
二階矩陣軸的最小值以直線為幾何外觀表現(xiàn),是指物體各節(jié)點(diǎn)位置與二階矩軸相距的長(zhǎng)度最小,對(duì)此結(jié)果進(jìn)行平方和處理,獲取平方和的最小值。假設(shè)二值圖像坐標(biāo)信息為[b[m,n]],獲取物體節(jié)點(diǎn)與特定直線之間的二乘方結(jié)果最小值,以獲取各節(jié)點(diǎn)與特定直線間距長(zhǎng)度平方相加結(jié)果的最小值,計(jì)算方式如式(6):
3結(jié)論
綜上所述,借助視覺智能技術(shù)提升自動(dòng)裝配生產(chǎn)精確性,發(fā)揮識(shí)圖技術(shù)零件位置鎖定功能,為零件裝配工序發(fā)展奠定技術(shù)基礎(chǔ)。識(shí)圖技術(shù)具有操作簡(jiǎn)便、識(shí)圖能力優(yōu)異等優(yōu)勢(shì),能夠順應(yīng)各類裝配生產(chǎn)需求。
參考文獻(xiàn):
[1] 洪慶,宋喬.基于智能視覺的機(jī)械零件圖像分割技術(shù)[J].機(jī)械制造與自動(dòng)化,2020,49(5):203-206.
[2] 魏中雨,黃海松.基于機(jī)器視覺和深度神經(jīng)網(wǎng)絡(luò)的零件裝配檢測(cè)[J].組合機(jī)床與自動(dòng)化加工技術(shù),2020(3):74-77,82.
[3] 朱博文,馬立.自動(dòng)軸孔裝配系統(tǒng)的現(xiàn)狀與關(guān)鍵技術(shù)[J].現(xiàn)代制造工程,2019(5):156-161.
【通聯(lián)編輯:代影】
