先進(jìn)絕熱壓縮空氣儲(chǔ)能發(fā)電系統(tǒng)參與調(diào)頻輔助服務(wù)控制優(yōu)化方法
2022-06-09 07:04:00馮庭勇鐘晶亮文賢馗楊大慧鄧彤天
熱力發(fā)電 2022年5期
關(guān)鍵詞:系統(tǒng)
馮庭勇,鐘晶亮,文賢馗,楊大慧,鄧彤天
(1.貴州大學(xué)電氣工程學(xué)院,貴州 貴陽 550025;2.貴州電網(wǎng)有限責(zé)任公司電力科學(xué)研究院,貴州 貴陽 550002;3.貴州電網(wǎng)有限責(zé)任公司研究生工作站,貴州 貴陽 550002)
先進(jìn)絕熱壓縮空氣儲(chǔ)能(advanced adiabatic compressed air energy storage,AA-CAES)系統(tǒng)作為最有潛力的儲(chǔ)能技術(shù)之一,具有效率高、容量大、存儲(chǔ)時(shí)間長(zhǎng)、成本相對(duì)低廉等優(yōu)點(diǎn)[1-4]。國內(nèi)外學(xué)者已針對(duì)AA-CAES 系統(tǒng)優(yōu)化和機(jī)組參與電力系統(tǒng)優(yōu)化等方面開展了相關(guān)研究:文獻(xiàn)[5]提出一種S-CAES電站調(diào)相運(yùn)行模式和熱量?jī)?yōu)化方法;文獻(xiàn)[6]提出了將多個(gè)噴射器和單個(gè)噴射器應(yīng)用到絕熱壓縮空氣儲(chǔ)能系統(tǒng)的儲(chǔ)能過程;文獻(xiàn)[7]針對(duì)先進(jìn)蓄熱式壓縮空氣儲(chǔ)能系統(tǒng)服務(wù)于執(zhí)行峰谷分時(shí)電價(jià)的電力系統(tǒng)運(yùn)行情景進(jìn)行了熱經(jīng)濟(jì)學(xué)分析;文獻(xiàn)[8]研究了微型壓縮空氣儲(chǔ)能系統(tǒng)的工作特性;文獻(xiàn)[9]通過優(yōu)化多個(gè)運(yùn)行參數(shù),提高了壓縮空氣儲(chǔ)能系統(tǒng)的儲(chǔ)能效率;文獻(xiàn)[10]針對(duì)先進(jìn)蓄熱式壓縮空氣儲(chǔ)能系統(tǒng)服務(wù)于執(zhí)行峰谷分時(shí)電價(jià)的電力系統(tǒng)運(yùn)行情景進(jìn)行了熱經(jīng)濟(jì)分析;文獻(xiàn)[11]提出一種含壓縮空氣的復(fù)合儲(chǔ)能系統(tǒng)在交直流混合微網(wǎng)中的主動(dòng)控制策略;文獻(xiàn)[12]提出了一種考慮壓縮空氣儲(chǔ)能和基于滑動(dòng)時(shí)間窗的電熱綜合響應(yīng)需求的綜合能源系統(tǒng)滾動(dòng)優(yōu)化規(guī)劃框架和模型;文獻(xiàn)[13]提出了含CAES 電站的源荷儲(chǔ)協(xié)同調(diào)度策略;文獻(xiàn)[14]提出了含AACAES 電站、常規(guī)機(jī)組和風(fēng)電機(jī)組的電力系統(tǒng)實(shí)時(shí)優(yōu)化調(diào)度策略。
然而,目前國內(nèi)相關(guān)研究均未對(duì)AA-CAES 機(jī)組參與調(diào)頻輔助服務(wù)性能指標(biāo)進(jìn)行計(jì)算與分析,同時(shí)缺乏相應(yīng)的控制策略。本文基于模塊化建模思想及APROS 仿真支撐系統(tǒng),建立了AA-CAES 系統(tǒng)模型,設(shè)計(jì)了使用多套不同參數(shù)PID 控制器的控制策略,并基于現(xiàn)行《廣東調(diào)頻輔助服務(wù)市場(chǎng)交易規(guī)則》[15]相關(guān)要求對(duì)所提控制方法進(jìn)行測(cè)試。
1 先進(jìn)絕熱壓縮空氣儲(chǔ)能系統(tǒng)
1.1 系統(tǒng)介紹
AA-CAES 系統(tǒng)具有容量大、工作時(shí)間長(zhǎng)、經(jīng)濟(jì)性能好、充放電循環(huán)次數(shù)多等特點(diǎn),其不僅節(jié)約了其他能源投入且系統(tǒng)發(fā)電過程零污染。AA-CAES系統(tǒng)釋能階段基本結(jié)構(gòu)如圖1 所示。當(dāng)電網(wǎng)電量緊缺時(shí),儲(chǔ)氣罐中的高壓空氣經(jīng)過主氣閥、氣動(dòng)調(diào)節(jié)閥進(jìn)入膨脹機(jī)進(jìn)行膨脹釋能,帶動(dòng)發(fā)電機(jī)發(fā)電。系統(tǒng)采用級(jí)間換熱,釋能階段儲(chǔ)熱罐中的加壓水經(jīng)過膨脹機(jī)的級(jí)間換熱器,加熱膨脹機(jī)入口空氣。

圖1 AA-CAES 系統(tǒng)釋能階段基本結(jié)構(gòu)Fig.1 Basic structure of the AA-CAES system during energy release stage
1.2 數(shù)學(xué)模型
1.2.1 儲(chǔ)氣罐
儲(chǔ)氣罐用于儲(chǔ)存高壓空氣。采用質(zhì)量平衡方程和能量平衡方程(定容條件)建立儲(chǔ)氣罐的動(dòng)力學(xué)模型[16]:
式中:Mst為儲(chǔ)氣罐內(nèi)氣體質(zhì)量,kg;mst,in為進(jìn)入儲(chǔ)氣罐的氣體流量,kg/s;mst,out為流出儲(chǔ)氣罐的氣體流量,kg/s;Ust為氣體單位質(zhì)量?jī)?nèi)能,kJ;hst,in為進(jìn)入儲(chǔ)氣罐的氣體焓值,kJ/kg;hst,out為流出儲(chǔ)氣罐的氣體焓值,kg/kg;Ken,st為儲(chǔ)氣罐和環(huán)境的傳熱系數(shù),W/(m2·K);Ast為儲(chǔ)氣罐和環(huán)境換熱的表面積,m2;Tst、Ten分別為儲(chǔ)氣罐溫度和環(huán)境溫度,K。
1.2.2 膨脹機(jī)
空氣進(jìn)入膨脹機(jī)膨脹釋能,膨脹機(jī)輸出功率計(jì)算式為[16]:

式中:We為膨脹機(jī)輸出功率,MW;me為空氣質(zhì)量流量,kg/s;he,in為膨脹機(jī)入口氣體焓值,kJ/kg;he,out為膨脹機(jī)出口氣體焓值,kJ/kg。
等熵效率為[17]:

式中:hs,e,out為膨脹機(jī)以等熵過程膨脹到相同出口壓力時(shí)的出口比焓,kJ/kg。
1.2.3 換熱器
空氣與管壁換熱量為:
初始階段。對(duì)數(shù)據(jù)集進(jìn)行預(yù)處理操作,由Job-Client把數(shù)據(jù)集切片為

換熱介質(zhì)與管壁換熱量為:
式中:δ為管壁厚度,m;Tc、Tw、Th分別為換熱介質(zhì)平均溫度、管壁平均溫度、管壁內(nèi)空氣溫度,K;Kw為管壁導(dǎo)熱系數(shù),W/(m2·K);αc、αh分別為內(nèi)、外管壁換熱系數(shù),W/(m2·K);Ac、Ah分別為內(nèi)、外管壁面積,m2。
1.2.4 閥門
摩擦阻力和流動(dòng)阻力共同構(gòu)成了閥門壓降,計(jì)算公式為[16]:
式中:ζ為閥門流動(dòng)阻力系數(shù);D為閥門直徑,m;ρ為流體密度,kg/m3;m為閥門空氣質(zhì)量流量,kg/s;Δp為閥門壓力損失,MPa。
1.3 數(shù)學(xué)模型
10 MW 級(jí)AA-CAES 系統(tǒng)(設(shè)計(jì)釋能功率為10 MW)基本設(shè)計(jì)參數(shù)見表1。

表1 10 MW 級(jí)AA-CAES 系統(tǒng)基本設(shè)計(jì)參數(shù)Tab.1 Basic design parameters of 10 MW-level AA-CAES system
經(jīng)仿真,系統(tǒng)釋能階段各級(jí)膨脹機(jī)額定工況運(yùn)行參數(shù)見表2,膨脹機(jī)輸出功率總和為10.41 MW,發(fā)電機(jī)端輸出功率為9.99 MW,與設(shè)計(jì)值偏差為0.1%,在工程允許范圍內(nèi),模型準(zhǔn)確。
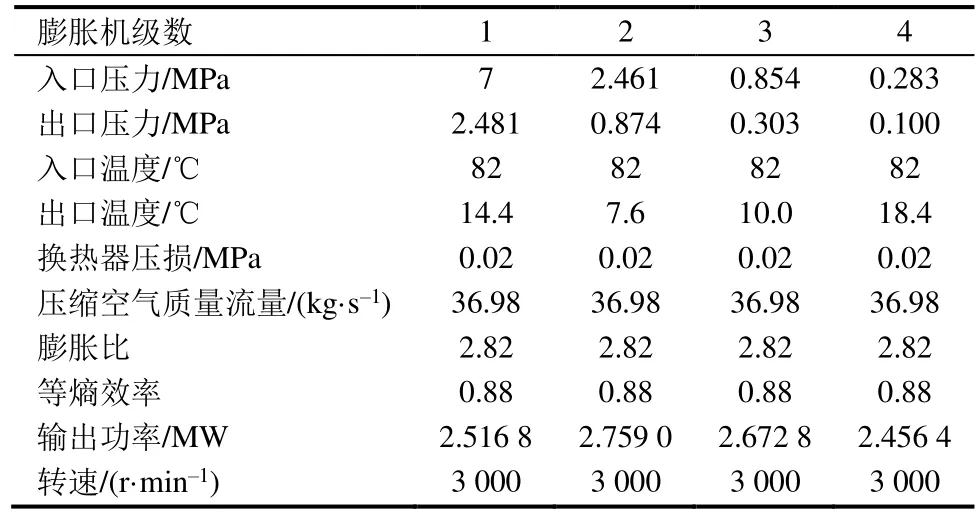
表2 各級(jí)膨脹機(jī)額定工況運(yùn)行參數(shù)Tab.2 Operating parameters of various expanders under rated operating conditions
2 南方區(qū)域發(fā)電單元調(diào)頻輔助服務(wù)指標(biāo)分析
根據(jù)《廣東調(diào)頻輔助服務(wù)市場(chǎng)交易規(guī)則》[15],發(fā)電單元每次響應(yīng)AGC 調(diào)節(jié)指令時(shí),主要從調(diào)節(jié)速率、響應(yīng)時(shí)間、調(diào)節(jié)精度3 個(gè)方面對(duì)響應(yīng)AGC 指令后的動(dòng)作情況進(jìn)行評(píng)價(jià)衡量。綜合調(diào)頻性能指標(biāo)K指發(fā)電單元響應(yīng)AGC 調(diào)節(jié)指令的綜合性能表現(xiàn),計(jì)算公式為:

以1 個(gè)交易周期為例,調(diào)頻里程補(bǔ)償收益等于調(diào)頻里程、綜合調(diào)節(jié)性能、市場(chǎng)出清價(jià)格的乘積。在相同的AGC 調(diào)節(jié)范圍下,調(diào)頻里程補(bǔ)償收益正比于綜合調(diào)節(jié)性能指標(biāo)。由發(fā)電機(jī)組參與調(diào)頻輔助服務(wù)的考核與補(bǔ)償規(guī)則可知,調(diào)節(jié)速率K1權(quán)重最大,占50%。因此,著力提高調(diào)節(jié)速率是提升AACAES 輔助服務(wù)競(jìng)爭(zhēng)力的重要手段。但是,為避免機(jī)組發(fā)電單元響應(yīng)AGC 控制指令時(shí)過調(diào)節(jié)或超調(diào)節(jié),《廣東調(diào)頻輔助服務(wù)市場(chǎng)交易規(guī)則》規(guī)定調(diào)節(jié)速率K1最大不超過5,否則調(diào)節(jié)速率合格率減少50%,會(huì)產(chǎn)生考核電量,給電站造成經(jīng)濟(jì)損失。因此,在不產(chǎn)生考核電量情況下,綜合調(diào)節(jié)性能指標(biāo)K越大,調(diào)頻里程補(bǔ)償收益也越大。
3 AA-CAES 參與調(diào)頻輔助服務(wù)過程
3.1 參與調(diào)頻輔助服務(wù)傳統(tǒng)方法
目前,AA-CAES 機(jī)組響應(yīng)AGC 控制指令的方法一般是采用1 套PID 控制器進(jìn)行閥門開度控制,從而調(diào)節(jié)機(jī)組出力。PID 控制器比例作用能使機(jī)組快速響應(yīng),比例系數(shù)kp增大時(shí),調(diào)節(jié)速率K1得到提升,但是系統(tǒng)穩(wěn)定性下降,且比例環(huán)節(jié)無法消除系統(tǒng)原有的靜態(tài)誤差;積分作用可以消除靜態(tài)誤差,當(dāng)減小積分系數(shù)ki,系統(tǒng)誤差消除效果得到提升,但是調(diào)節(jié)速率K1降低。通過比例作用與積分作用相互配合,發(fā)揮各自優(yōu)勢(shì),以滿足《廣東調(diào)頻輔助服務(wù)市場(chǎng)交易規(guī)則》對(duì)調(diào)頻性能指標(biāo)的要求。
本文研究對(duì)象為10 MW AA-CAES 系統(tǒng),機(jī)組常運(yùn)行負(fù)荷段為額定負(fù)荷的80%~110%,AGC 指令波動(dòng)范圍一般為機(jī)組實(shí)測(cè)負(fù)荷上、下調(diào)節(jié)0.5 MW。常運(yùn)行負(fù)荷段PID 控制器參與AGC 調(diào)頻運(yùn)算控制過程邏輯如圖2 所示。通過測(cè)試模塊得到機(jī)組實(shí)時(shí)功率,機(jī)組協(xié)調(diào)控制系統(tǒng)接收AGC 控制指令,實(shí)測(cè)功率與AGC 控制指令的差值進(jìn)入AGC-PID 控制器進(jìn)行運(yùn)算,該輸出作用于氣動(dòng)調(diào)節(jié)閥。

圖2 常運(yùn)行負(fù)荷段PID 控制器參與AGC 調(diào)頻運(yùn)算控制過程邏輯Fig.2 The control logic of PID controller participating AGC frequency modulation during normal load operation
通過測(cè)試發(fā)現(xiàn),AA-CAES 機(jī)組在常運(yùn)行負(fù)荷段參與AGC 調(diào)頻,選擇kp=56×10-6、ki=6 作為PID控制器參數(shù),可使機(jī)組在不產(chǎn)生考核電量情況下綜合調(diào)節(jié)性能指標(biāo)K達(dá)到最大。
3.2 寬負(fù)荷段參與調(diào)頻輔助服務(wù)
為了提高AA-CAES 的適用范圍,機(jī)組應(yīng)該具備在寬負(fù)荷段參與調(diào)頻的能力。但是,通過測(cè)試,1 套PID 參數(shù)在不同負(fù)荷段控制效果不同,甚至不能滿足要求。在機(jī)組功率分別為5.0、6.0、7.0、8.0、9.0 MW 時(shí),利用AGC 控制指令將機(jī)組輸出功率向上調(diào)節(jié)0.5 MW 進(jìn)行測(cè)試,結(jié)果見表3。

表3 寬負(fù)荷段調(diào)頻性能指標(biāo)(1 套PID 控制器)Tab.3 Frequency modulation performance indexes for wide load range (a set of PID controller)
從表3 可以看出:使用1 套PID 控制器的機(jī)組在表3 所示的5 組不同負(fù)荷段響應(yīng)AGC 控制指令,只有機(jī)組負(fù)荷從9.0 MW 調(diào)至9.5 MW 時(shí),調(diào)頻速率K1不大于5,滿足《廣東調(diào)頻輔助服務(wù)市場(chǎng)交易規(guī)則》要求;而其余4 組測(cè)試區(qū)間輔助調(diào)頻,調(diào)頻速率K1均大于5,會(huì)因超出規(guī)定而產(chǎn)生考核電量。
4 多套PID 控制器的設(shè)計(jì)和運(yùn)用
4.1 控制回路結(jié)構(gòu)
為解決上述問題,本文提出多級(jí)分段設(shè)置PID控制器參數(shù)的控制策略。為避免采用功率指令信號(hào)或差值信號(hào)帶來的排列組合多、分段多、不易實(shí)現(xiàn)問題,該策略使用機(jī)組功率實(shí)測(cè)信號(hào)進(jìn)行判斷。將機(jī)組運(yùn)行負(fù)荷段分為3 段,每段運(yùn)用不同參數(shù)的PID 控制器。該策略下PID 控制器流程如圖3 所示。
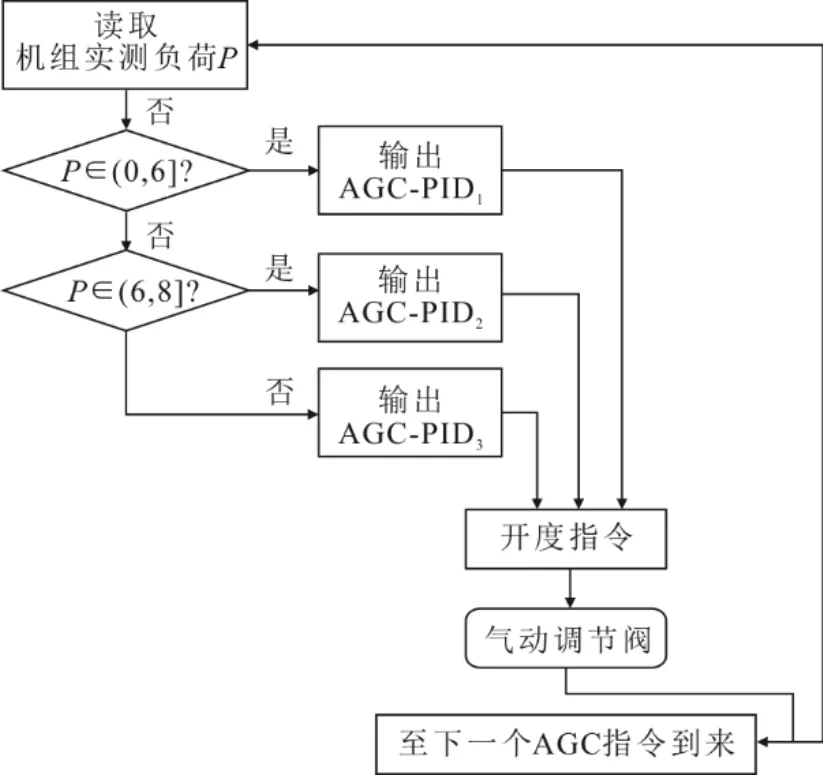
圖3 PID 控制器選擇流程Fig.3 Selection process of PID controller
發(fā)電機(jī)組接收到新AGC 控制指令時(shí),立即將其鎖定,并進(jìn)行判斷:如實(shí)測(cè)功率大于8 MW,則使用AGC-PID1作為輸出;如實(shí)測(cè)功率大于6 MW且小于8 MW,則選用AGC-PID2作為輸出;如實(shí)測(cè)功率小于6 MW,則選用AGC-PID3作為輸出。此選擇在調(diào)頻過程中不發(fā)生改變,直至下一個(gè)AGC指令到來。機(jī)組每接收到新AGC 指令,即進(jìn)行PID控制器選擇的判斷。
考慮機(jī)組在運(yùn)行過程中因PID 控制器切換而產(chǎn)生功率波動(dòng)問題,設(shè)計(jì)了PID 控制器追蹤判斷模塊。將氣動(dòng)調(diào)節(jié)閥開度信號(hào)作為PID 控制器追蹤信號(hào),機(jī)組實(shí)測(cè)負(fù)荷鎖定值作為判斷條件,負(fù)荷鎖定值對(duì)應(yīng)的PID 控制器不進(jìn)行閥門信號(hào)追蹤,其余2 套PID 控制器追蹤閥門開度信號(hào)。三級(jí)分段設(shè)置PID運(yùn)算控制過程邏輯如圖4 所示。將AGC 控制指令與機(jī)組實(shí)時(shí)功率進(jìn)行偏差計(jì)算,并輸入多個(gè)不同參數(shù)PID 控制器進(jìn)行運(yùn)算,但最終執(zhí)行器只接收與機(jī)組實(shí)測(cè)功率相對(duì)應(yīng)PID 控制器的運(yùn)算結(jié)果,并作用于氣動(dòng)調(diào)節(jié)閥,實(shí)現(xiàn)對(duì)AA-CAES 機(jī)組的出力控制。

圖4 3 套PID 控制器運(yùn)算控制過程邏輯Fig.4 Logic diagram of operational control process of three PID controllers
4.2 測(cè)試分析
通過大量仿真測(cè)試,選擇AGC-PID1、AGCPID2、AGC-PID3控制器kp為56×10-6、49×10-6、46×10-6,ki均為6。對(duì)上述不滿足《廣東調(diào)頻輔助服務(wù)市場(chǎng)交易規(guī)則》要求的測(cè)試區(qū)間進(jìn)行測(cè)試,調(diào)頻性能指標(biāo)見表4。從表4 可以看出,所有測(cè)試區(qū)間調(diào)節(jié)速率K1最大均不超過5,符合《廣東調(diào)頻輔助服務(wù)市場(chǎng)交易規(guī)則》要求。
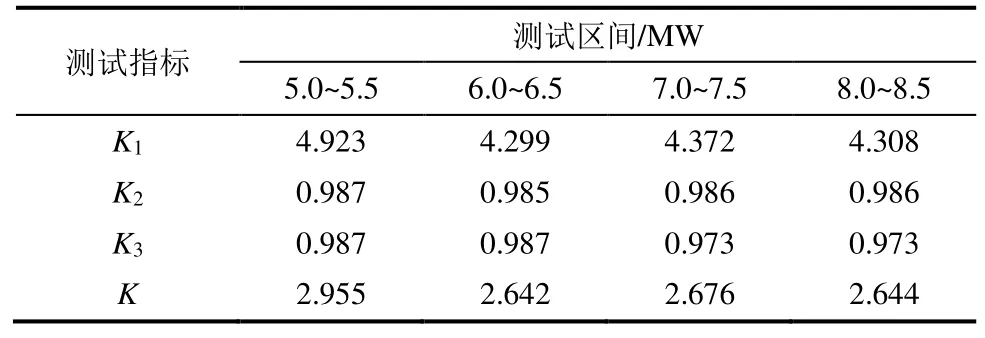
表4 寬負(fù)荷段調(diào)頻性能指標(biāo)(3 套PID 控制器)Tab.4 Frequency regulation performance index of wide load section (three PID controllers)
使用不同套數(shù)PID 控制對(duì)調(diào)頻性能關(guān)鍵指標(biāo)的影響如圖5 所示。從圖5 可以看出,與使用1 套PID控制器相比,使用3 套PID 控制器參與AGC 調(diào)頻,綜合調(diào)頻性能指標(biāo)略有降低,但調(diào)節(jié)速率K1均不大于5,避免了考核電量的產(chǎn)生。

圖5 不同套數(shù)PID 控制器對(duì)調(diào)頻性能指標(biāo)的影響Fig.5 The influence of different sets of PID controller on frequency modulation performance index
5 結(jié)論
1)使用1 套PID 控制器無法實(shí)現(xiàn)機(jī)組在寬負(fù)荷段參與AGC 調(diào)頻。機(jī)組在非常運(yùn)行負(fù)荷段參與調(diào)頻,會(huì)因調(diào)節(jié)速率K1不滿足要求而產(chǎn)生考核電量,造成經(jīng)濟(jì)損失;采用多級(jí)分段設(shè)置PID 控制器參數(shù)的控制策略,可使機(jī)組在寬負(fù)荷段參與調(diào)頻性能指標(biāo)滿足要求,不產(chǎn)生考核電量。
2)選用功率實(shí)測(cè)信號(hào)作為判斷信號(hào),可以避免采用AGC 指令信號(hào)帶來的排列組合多、分段多、不易實(shí)現(xiàn)的問題。通過設(shè)置非實(shí)測(cè)功率對(duì)應(yīng)PID 控制器追蹤閥門信號(hào),可降低不同PID 控制器切換帶來的功率擾動(dòng)。
3)采用多級(jí)分段設(shè)置PID 控制器參數(shù)的控制策略解決了使用單套PID 控制器在寬負(fù)荷段調(diào)頻過程產(chǎn)生的考核電量問題,多套PID 控制器參與AGC調(diào)頻在AA-CAES 系統(tǒng)電站中具有一定的推廣價(jià)值。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32