基于集合經驗模態分解- 支持向量機的高壓共軌系統故障診斷方法
2022-06-10 05:46:52李良鈺蘇鐵熊馬富康吳小軍徐春龍
兵工學報 2022年5期
李良鈺, 蘇鐵熊, 馬富康, 吳小軍, 徐春龍
(1.中北大學 機電工程學院, 山西 太原 030051; 2.中北大學 能源動力工程學院, 山西 太原 030051;3.中國北方發動機研究所, 天津 300400)
0 引言
高壓共軌柴油機由于功率高、結構緊湊等特點,在車輛、船舶及其他工程機械領域得到廣泛應用。作為一個由高壓油泵、共軌管、電控噴油器與高壓油管等組成的復雜系統,高壓共軌系統在運行中易受沖擊振動、磨損、腐蝕與老化等因素影響而發生各種類型故障。系統本身工作振聲與振動較小,易被其他信號干擾與覆蓋,故傳統的依照振動信號與振聲信號診斷故障的方法較難實現,對發動機潤滑油、柴油的檢測很難精確地判斷哪一部位發生了故障且存在檢測周期較長與成本較高等問題,無法實現故障的實時監測。
近年來,小波分析、經驗模態分解(EMD)、集合經驗模態分解(EEMD)等時域分析方法廣泛應用于柴油機故障的分析與診斷中。在特征值識別領域,能量向量、排列熵向量等應用于提取特征值中。在分類組合問題上,支持向量機(SVM)等分類器算法的應用使得求解各類復雜的分類組合問題成為可能。通過時域分析提取振動、振聲信號的特征值并利用分類器算法進行識別的故障診斷方法日趨成熟。但在對軌壓信號的提取與處理上仍使用核主元分析法,通過采集歷史數據進行核函數的非線性分析,無法完整地提取軌壓信號中的特征值,時效性較差,還會丟失某些重要的時頻特征,導致診斷出現錯誤。截止目前,時域分析這一重要分析手段在共軌系統故障診斷領域尚未廣泛應用,包括插值函數選取、特征向量構建等技術細節仍有待研究。
本文將時域分析- 分類器分類這一故障分析診斷方法用于高壓共軌系統的故障診斷,在傳統EEMD基礎上,針對軌壓信號的波動特性對插值函數與停止迭代條件進行相應改進,利用過零率曲線確定提取準則并提取分解后的固有模態函數(IMF)分量的特征向量,使用SVM進行故障診斷,提出一種使用時域分析診斷高壓共軌系統故障的方法。
1 基于仿真的軌壓波動信號提取
診斷模型的建立與測試均需要大量軌壓信號數據,且對其數據質量要求較高。臺架實驗采集需要花費大量時間且無法保證采集質量與精度,故本文使用經實驗驗證后的一維仿真模型提取軌壓信號,以研究時域分析診斷高壓共軌系統故障的方法。
本文中以10缸柴油機高壓共軌系統作為研究對象,為簡化計算,建立一半5缸單軌柴油機高壓共軌供油系統模型進行研究,相關參數如表1所示,使用AME Sim13.2軟件建立高壓共軌系統一維仿真模型如圖1所示,運行工況如下:發動機轉速為3 800 r/min,循環噴油量為220 mm,噴油脈寬為0.398 ms。一個工作周期內平均軌壓為185 MPa,波動小于5%,噴油器編號由共軛管道進油口至共軌管道出口依次編號為噴油器A~噴油器E,噴油次序為噴油器A-噴油器E-噴油器B-噴油器C-噴油器D。
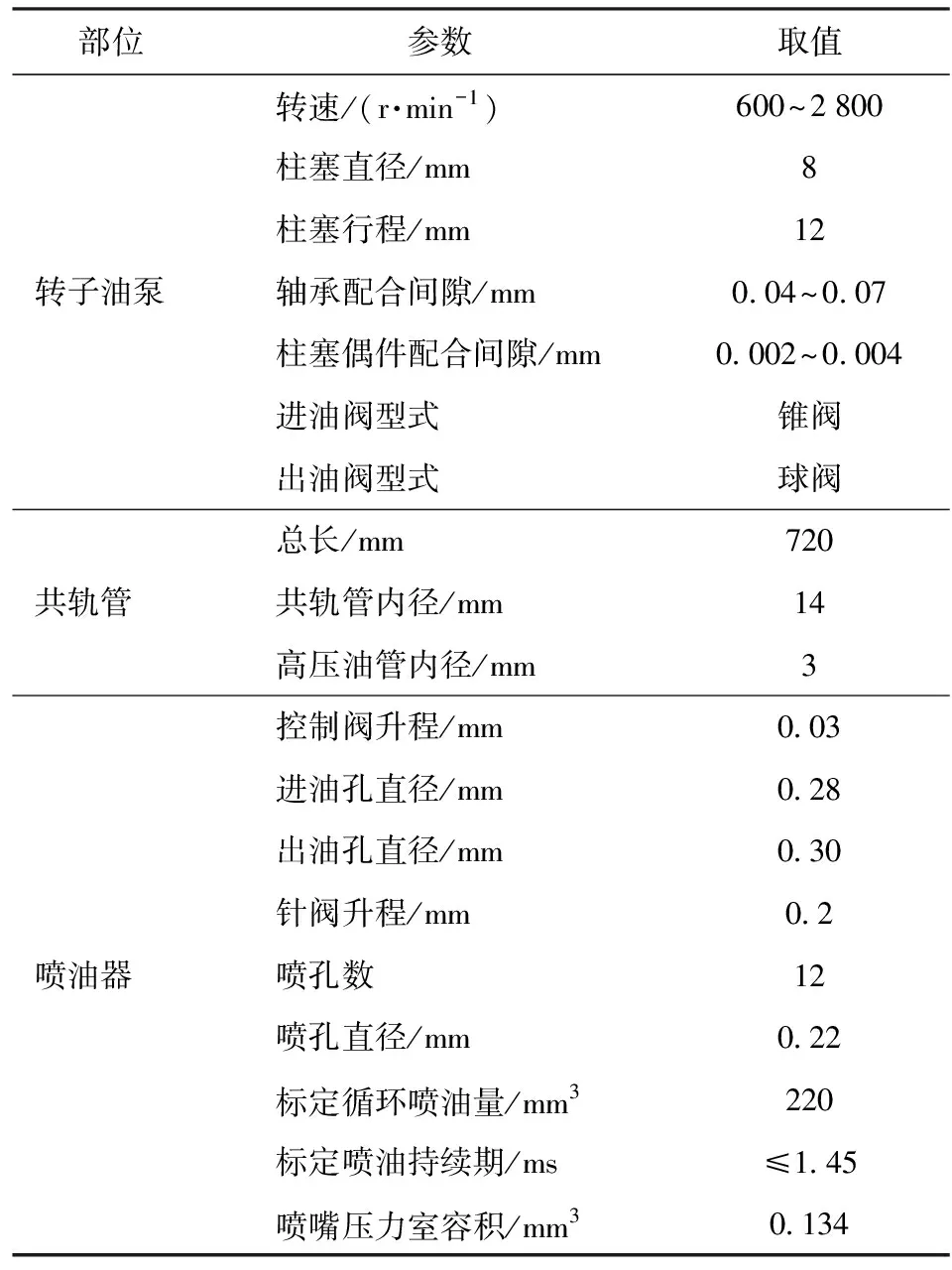
表1 高壓共軌系統參數Tab.1 High pressure common rail system parameters
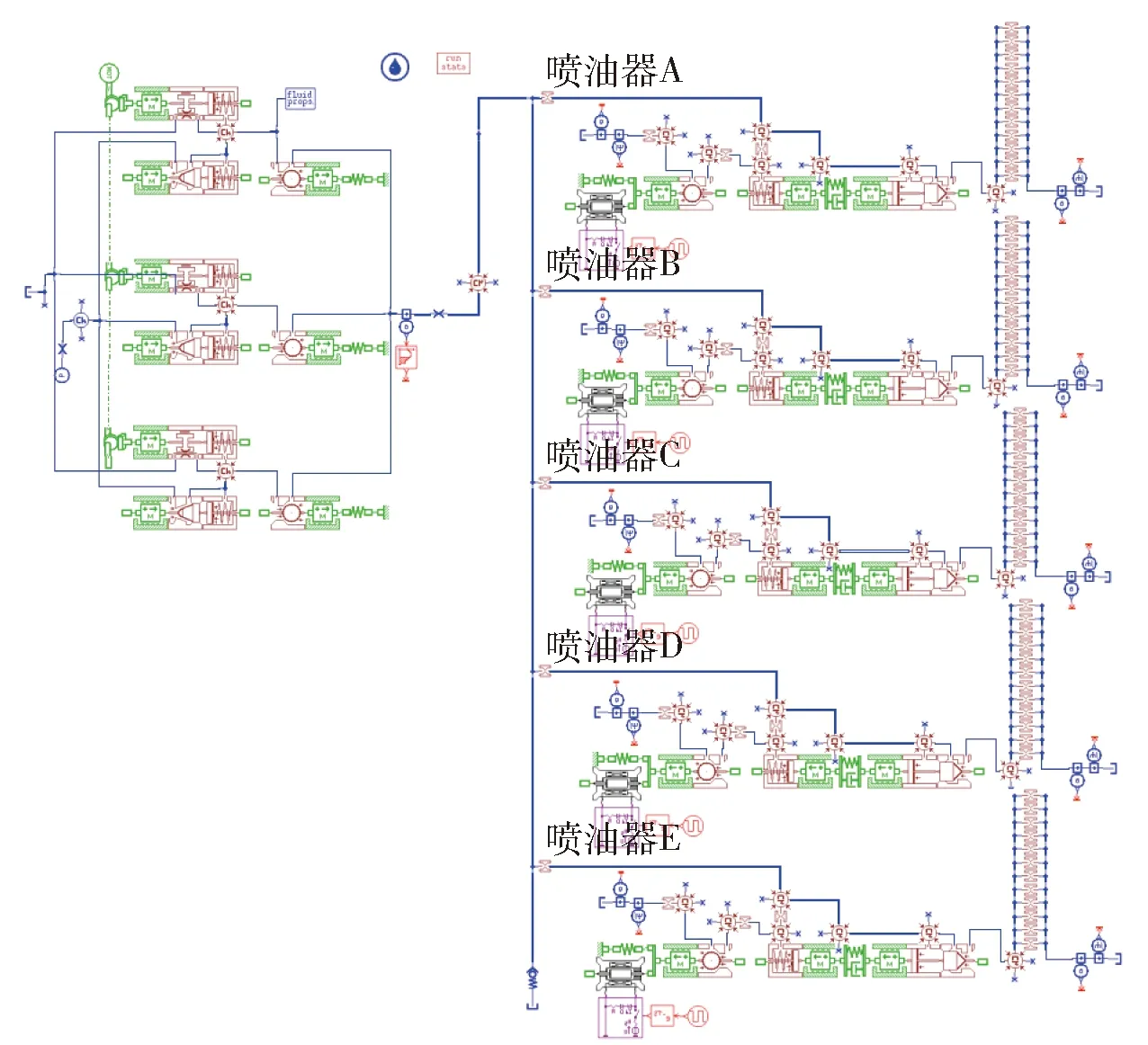
圖1 高壓共軌系統一維仿真模型Fig.1 One-dimensional simulation model of high-pressure common rail system
根據高壓共軌柴油機供油系統常見故障及其分類,現選取6種運行狀態,其中1種為正常運行狀態,5種為故障狀態。6種狀態分別為正常狀態、噴油器B延遲噴油狀態、噴油器B電磁閥磨損狀態、油泵柱塞磨損狀態、共軌管入口處漏油狀態和噴油器B入口處漏油狀態。將上述6種狀態分別命名為狀態1、狀態2、狀態3、狀態4、狀態5和狀態6,其軌壓信號如圖2所示。
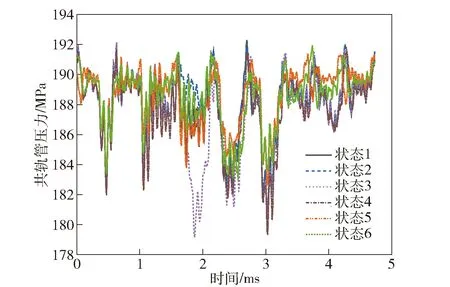
圖2 不同運行狀態的軌壓信號Fig.2 Rail pressure signals in different operating states
為驗證模型的正確性和準確性,對共軌系統進行臺架試驗。使用德國博世公司生產的BOSCH軌壓傳感器采集軌壓信號,采樣頻率為1 000 Hz;使用北京森羅南華科技有限公司生產的DEWE43信號采集模塊作為數據采集器。試驗臺如圖3所示。圖4所示為正常狀態下噴油壓力試驗值與仿真值的對比圖。選取圖4中試驗曲線與仿真曲線吻合程度較差的點(如圖4中的、、、處標記的數據點),這些點的仿真值、試驗值與相對誤差如表2所示。
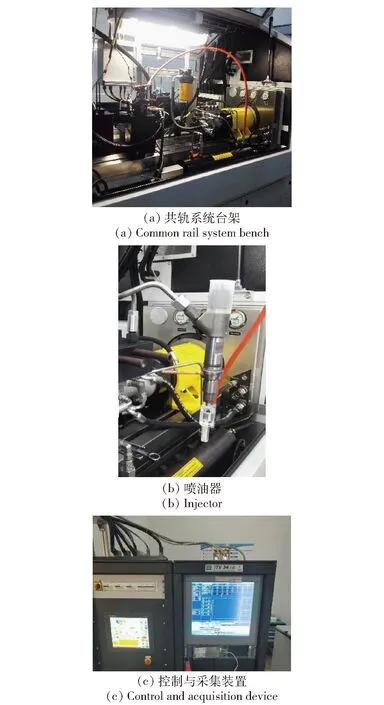
圖3 共軌系統試驗圖Fig.3 Common rail system test diagram
從圖4、表2中可以看出:噴油壓力試驗值與仿真值的最大誤差為0.543 5%;一個工作周期內平均軌壓為185.722 MPa,軌壓最大值為191.896 MPa,軌壓最小值為183.154 MPa,軌壓波動小于0.5%。符合仿真要求,故本文仿真模型能夠較準確地模擬此共軌系統在正常狀態下的運行。
依照上述驗證方法分別對噴油器B延遲噴油狀態、噴油器B電磁閥磨損狀態和油泵柱塞磨損狀態下仿真模型的正確性與準確性進行驗證。通過調整仿真模型與試驗臺架的噴油開始時間,驗證噴油器B延遲噴油狀態下仿真模型的正確性與準確性;通過調整使用磨損的電磁閥進行臺架試驗并測量磨損的電磁閥參數輸入仿真模型,驗證噴油器B電磁閥磨損狀態下仿真模型的正確性與準確性;通過在仿真模型中加入泄漏孔口驗證共軌管入口處漏油狀態和噴油器B入口處漏油狀態下仿真模型的正確性與準確性。通過調整仿真模型與試驗臺架的供油速率,驗證油泵柱塞磨損狀態下仿真模型的正確性與準確性。
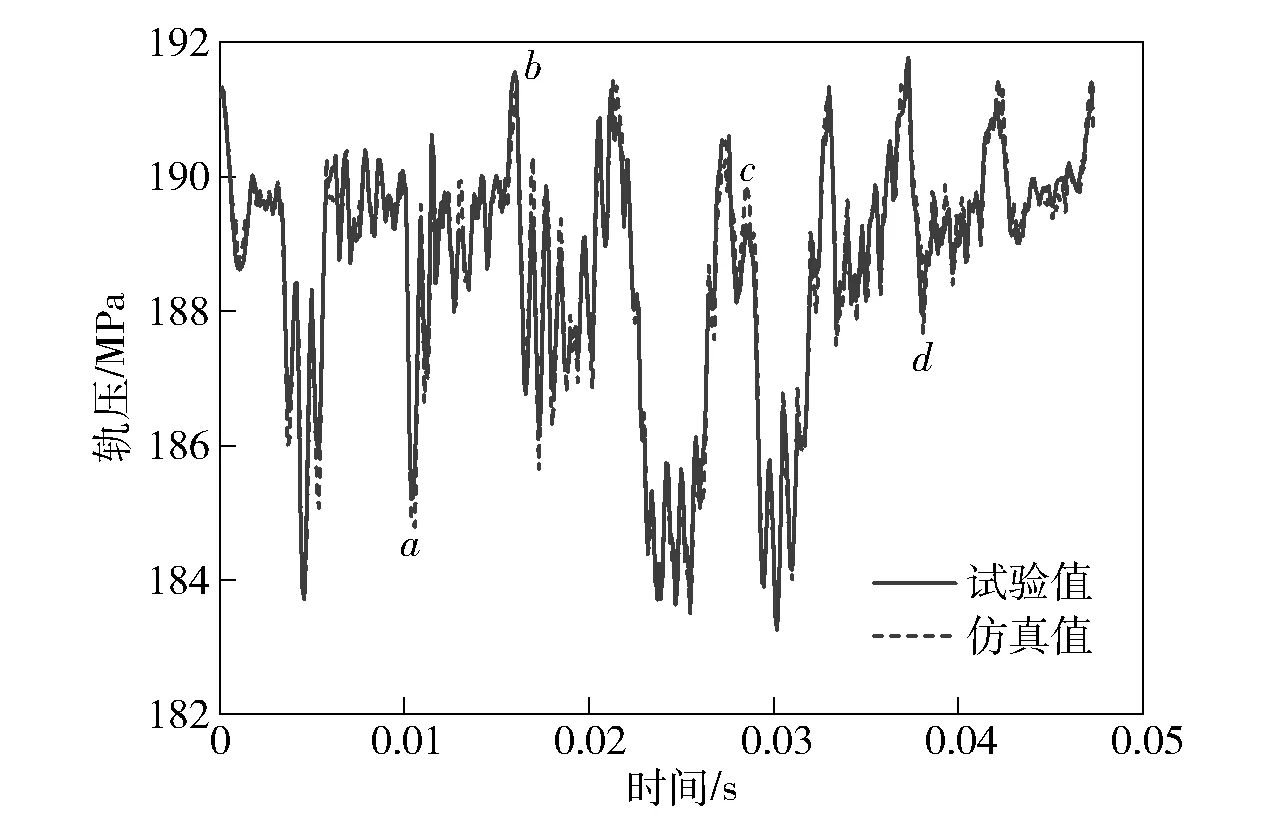
圖4 軌壓試驗值與仿真值對比Fig.4 Comparison chart of rail pressure experimental and simulated values
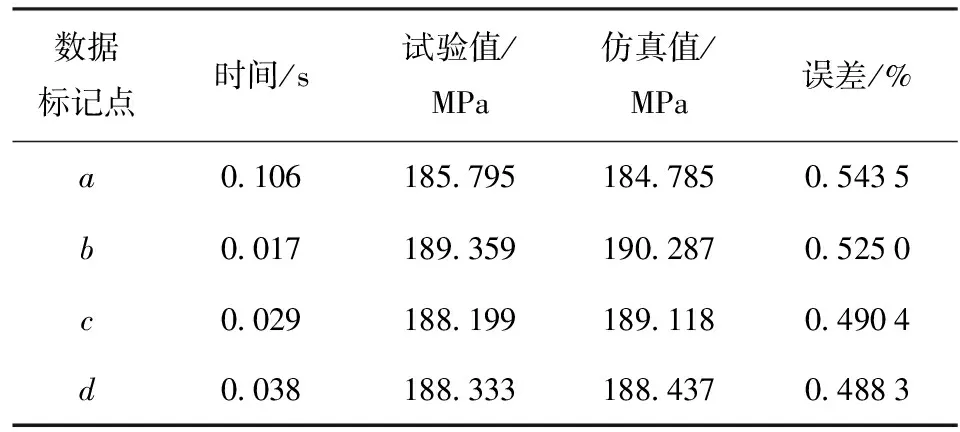
表2 軌壓試驗值與仿真值對比
驗證結果表明,本文仿真模型能夠較準確地模擬10缸柴油機在正常狀態、噴油器B延遲噴油狀態、噴油器B電磁閥磨損狀態、油泵柱塞磨損狀態、共軌管入口處漏油狀態和噴油器B入口處漏油狀態下的運行。
2 軌壓信號的分解與特征值提取
為準確地提取軌壓信號的特征值,本文利用EEMD將軌壓信號分解為不同的IMF,將提取的多個能量特征值構建為能量特征向量,進行故障診斷。
2.1 基于EEMD的軌壓信號分解
EEMD是一種在EMD基礎上提出的將信號分解為IMF的方法。通過向原始信號中加入白噪音信號,使不同時間尺度的信號分布到合適的參考尺度上,經過多次平均抵消噪音,集成均值得到最終結果。EEMD利用白噪音信號頻譜均勻分布的特性解決了EMD存在的模態混疊問題,進一步提高了分解精度,較準確地保留了原始數據中的特征。
EEMD的目的是將一個信號分解為個IMF和一個殘差。其中,每個IMF需要滿足以下條件:
1) 在整個數據范圍內,局部極值點和過零點的數目必須相等,或者相差數目最多為1。
2) 任意時刻,局部最大值的包絡(上包絡線)和局部最小值的包絡(下包絡線)的平均值必須為0。
若某一信號符合以下特征,則此信號可進行EEMD:1)信號至少存在一個極大值與一個極小值;2)信號的時間尺度特性是由兩個極值點之間的時間尺度確定的。
設為預期進行EMD的總次數,為進行EMD的當前次數,并構建個不同的白噪音信號待用。在全部次分解完成后,將次EMD得到的每個階段對應的IMF求取均值,即為通過EEMD得到的最終IMF,其分解流程圖如圖5所示。
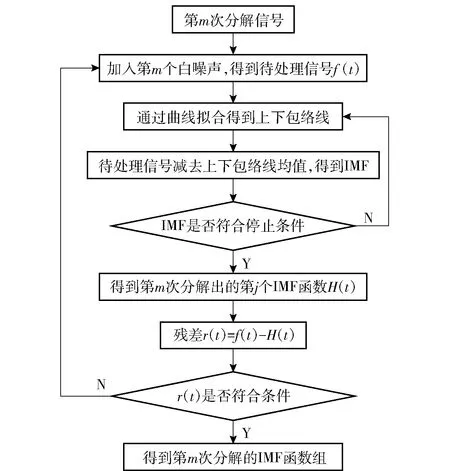
圖5 EEMD流程Fig.5 EEMD flow chart
在擬合曲線得到上下包絡線的過程中,本文使用三次樣條插值曲線構造包絡線。設區間上有=<<…<<…<=,其中代表信號數值,代表區間內信號點數量。則對于插值函數()應需要滿足如下條件:
1) 對于全部內部節點,插值函數左右極限相等且為定值。
2) 對于全部內部節點,其1階導數左右極限皆為0。
3) 首尾節點插值函數值為定值且1階導數為0。
對于=1,2,3,…,-1,有
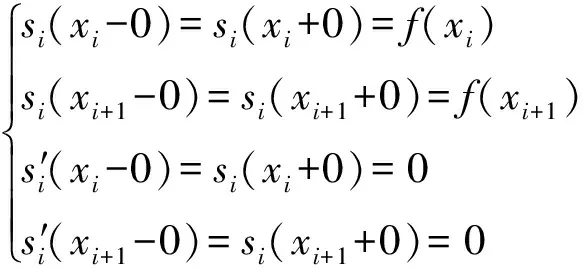
(1)
迭代停止函數如(2)式所示:
(2)
式中:、分別為上、下包絡線。設定3個閾值、、,當()中小于的比例不小于且不存在大于的值時停止迭代。
根據本節中的分解步驟分別對狀態1~狀態4的軌壓信號進行EEMD,圖6所示為由狀態1分解得到的6階IMF分量與頻譜。由圖6可以看出,各階IMF分量的頻率分明,信號混疊現象不嚴重。
2.2 軌壓信號的特征值提取
選取相鄰曲線的過零點斜率比最大的IMF分量作為分離IMF,代表此IMF分量的信號貢獻突然降低。分別對狀態1~狀態6的6階IMF分量進行過零點率對比,圖7所示為狀態1的IMF1~IMF6分量的過零點個數與狀態1的IMF1~IMF5分量的斜率比。從圖7中可以看出:狀態1在IMF3處可以取得最大斜率比;其他5種狀態的IMF1~IMF6分量過零點個數與IMF1~IMF5分量信號的斜率比均與狀態1類似,均在IMF3處出現最大斜率比。故在此采用IMF1~IMF3分量提取特征值。
每個IMF分量的能量都代表著此頻率內信號的能量,故信號與能量之間存在某種映射關系,可以作為故障診斷的依據。對IMF1~IMF3提取相應的能量,構建特征向量。各IMF分量的能量為
(3)
式中:表示第個IMF的能量;表示第個IMF曲線的值;為此分量持續的時間。
表3所示為6種狀態的軌壓信號經EEMD處理后前3階IMF能量構成的三維特征向量。
3 故障診斷試驗與分析
3.1 基于SVM的故障診斷
SVM是一種用來解決二分類問題的監督學習算法,其基本模型是在特征空間上找到最佳的分離超平面,使得訓練集上正負樣本間隔最大。在引入核方法之后SVM也可以用來解決非線性問題,將非線性問題通過核函數映射至高維空間使其線性可分。
Fernández-Delgado等通過比較在不同數據集上(121個)不同分類器(179個)的實際效果后認為:SVM適合解決低維度、小樣本量問題;神經網絡的表現隨著數據量增大而變好;隨機森林在解決高緯度問題時表現較好,但整體不如SVM與神經網絡等常用多分類方法相比,SVM更適合解決本文涉及的小樣本、低維度、簡單分類問題。故本文選取SVM作為分類方法。
為提高診斷模型對故障的敏感程度,降低仿真模型引起的誤差,需要采集多組數據進行分類訓練與測試。依據第1節所述,對正常狀態、噴油器B延遲噴油狀態、噴油器B電磁閥磨損狀態、油泵柱塞磨損狀態、共軌管入口處漏油狀態和噴油器B入口處漏油狀態等6種運行狀態分別采集70組軌壓信號,其中40組作為訓練樣本,30組作為測試樣本。
對訓練樣本的軌壓信號提取前3階IMF能量構成三維特征向量,得到箱形圖如圖8所示(圖中IQR為四分位距),以3階能量(本文所使用的能量均無量綱)作為軸、軸、軸坐標,繪制能量分布三維圖如圖9所示。從圖8、圖9中可以看出,經EEMD分解與能量特征值提取后,6種狀態的能量特征向量區分較明顯。在經過3階特征向量提取后,其區分便較明顯,故可以確定本文高壓共軌系統故障診斷問題屬于低維度問題,可以通過一個低維度的特征向量清晰地描述其所處狀態。
基于SVM建立的高壓共軌系統故障診斷模型如圖10所示。圖10中,1~6表示狀態1~狀態6,(,)(≠,,∈1,2,…,6)表示狀態對狀態進行SVM運算,非表示排除為狀態的可能。
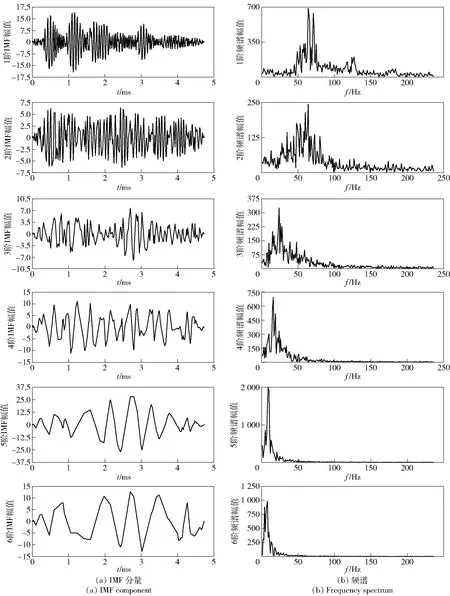
圖6 狀態1軌壓信號的6階IMF分量與頻譜Fig.6 Sixth-order IMF components and frequency spectrum of rail pressure signal in State 1
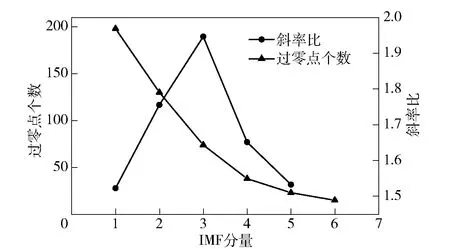
圖7 各IMF分量過零點個數與斜率比Fig.7 Number of zero-crossing points and slope ratio of each IMF component
將訓練樣本的三維特征向量輸入使用高斯核函數的SVM,建立針對高壓共軌系統的故障分類器。對測試樣本的軌壓信號提取前3階IMF能量構成三維特征向量輸入SVM中進行故障診斷,測試樣本根據運行狀態不同依次編號為1~180,其診斷結果如圖11所示,其診斷正確率如表4所示。
3.2 結果與分析
為驗證本文基于EEMD-SVM改進的共軌系統故障診斷模型的性能,組合能量、排列熵、奇異值等不同維度的特征向量,分別以過零點斜率比與能量占比作為分離IMF的依據,得到7種特征向量組合,其在兩種分離依據下的診斷正確率如表5所示。從表5中可以看出:以過零點斜率比作為分離IMF依據的正確率比以能量占比要好;不同的特征組合診斷效果不同,單以能量作為特征向量時的診斷正確率最高,配合過零點斜率比作為分類IMF依據可以達到9611的正確率。
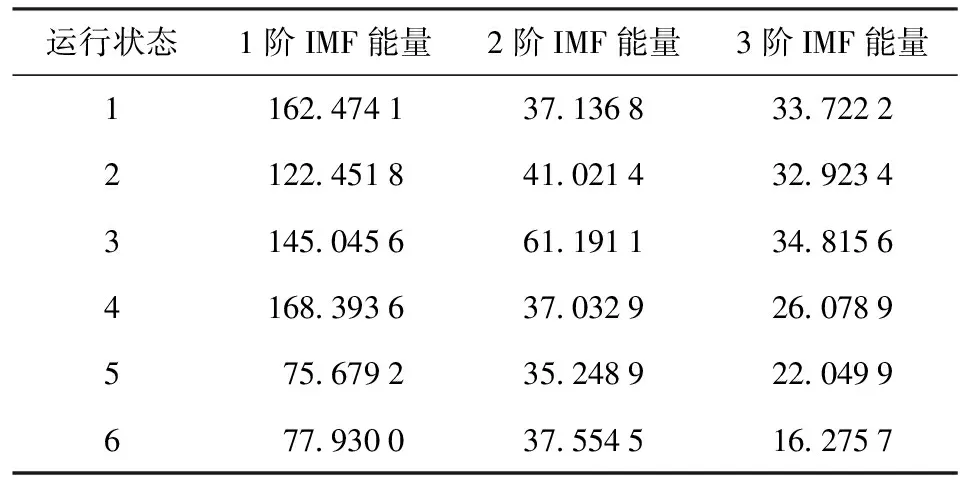
表3 不同運行狀態下的三維特征向量Tab.3 Three-dimensional feature vectorsunder differentoperating conditions
在以能量作為特征值、過零點斜率比作為分離IMF依據的基礎上,對比EEMD在改進前后的診斷正確率結果如表6所示。從表6中可以看出,改進的EEMD可以提高診斷正確率。表明本文基于EEMD-SVM改進的共軌系統故障診斷方法在診斷共軌系統上是有效且性能較優秀的。
3.3 試驗驗證
以狀態1、狀態4和狀態5的試驗信號各20組作為測試樣本,依次序編號1~60,輸入至已經訓練完畢的故障診斷模型中,診斷結果如圖12所示,診斷正確率如表7所示。
從圖12與表7中可以看出,在依據試驗數據對故障進行訓練與診斷時,本文以EEMD-SVM為基礎的故障診斷方法依然有9667的診斷正確率,表明仿真模型能夠準確模擬高壓共軌系統的運行,本文方法能夠對高壓共軌系統的實際故障進行診斷。
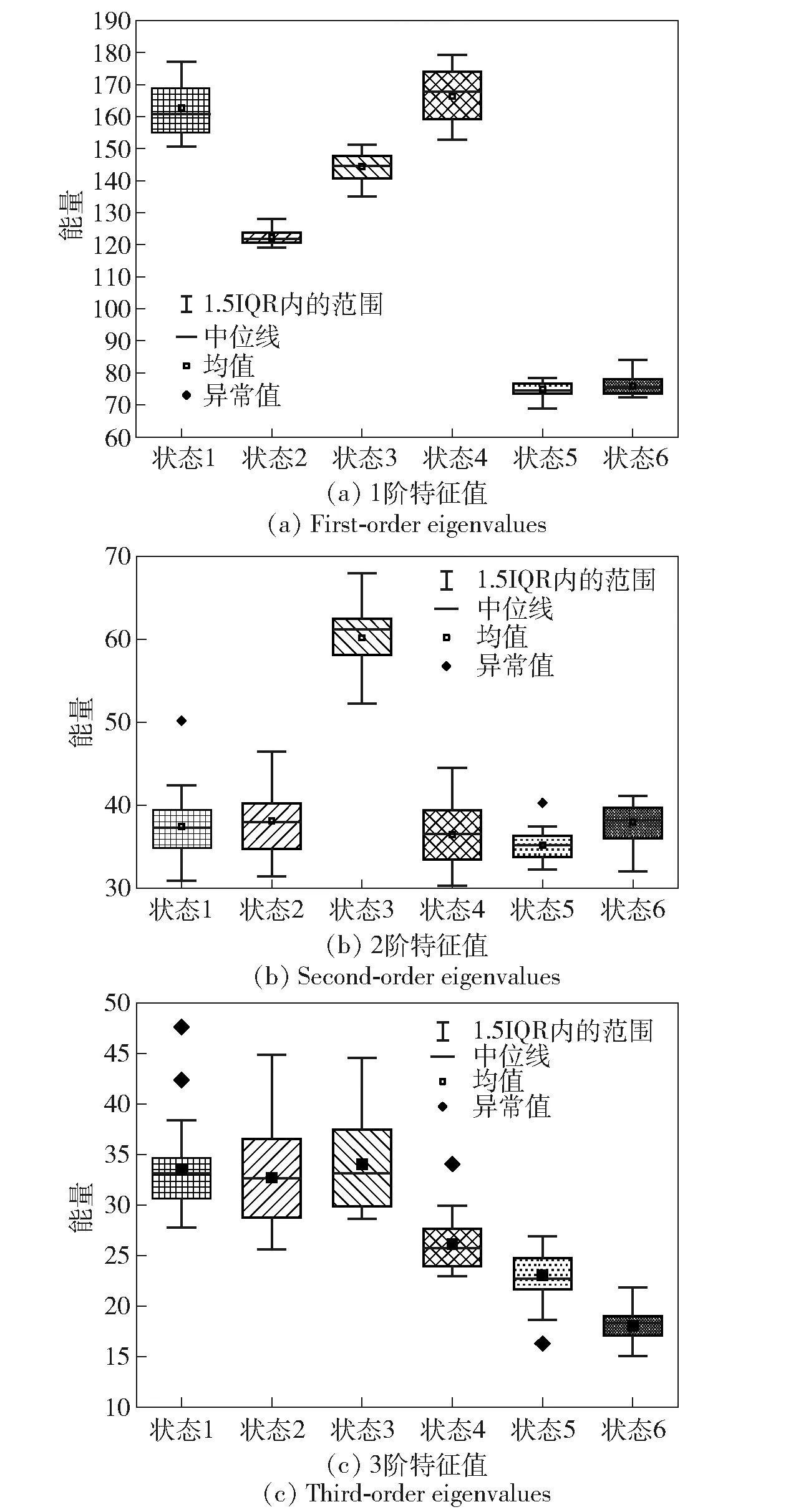
圖8 三維特征向量Fig.8 Three-dimensional eigenvalue vector
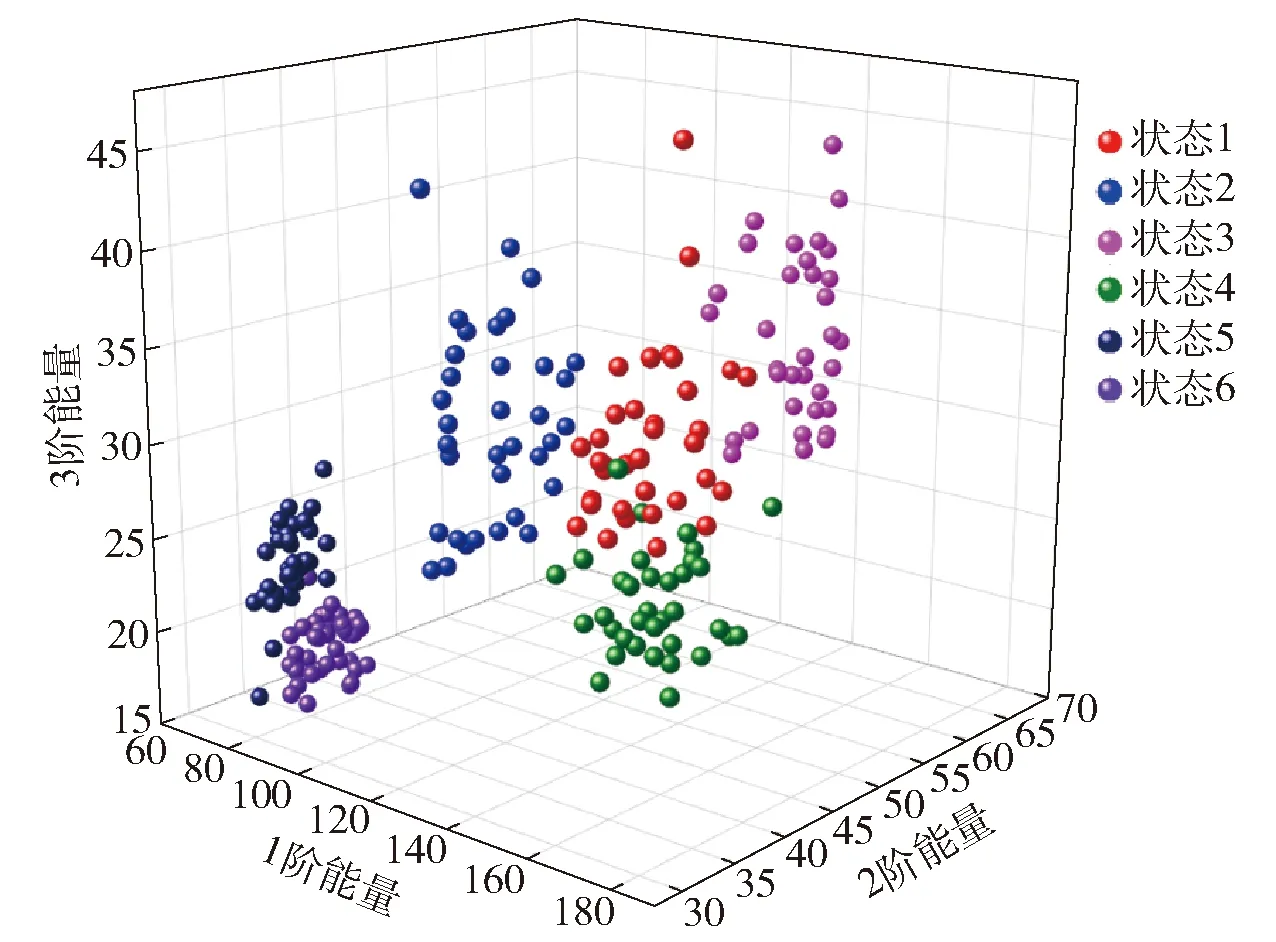
圖9 三維分布圖Fig.9 Three-dimensional distribution map
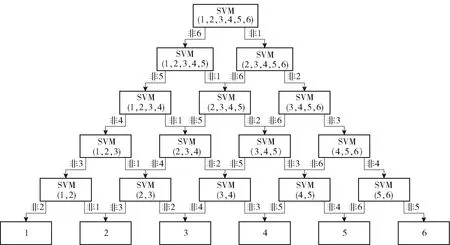
圖10 SVM故障診斷模型Fig.10 SVM fault diagnosis model
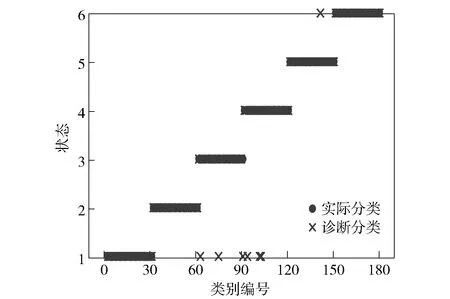
圖11 診斷結果Fig.11 Diagnostic results
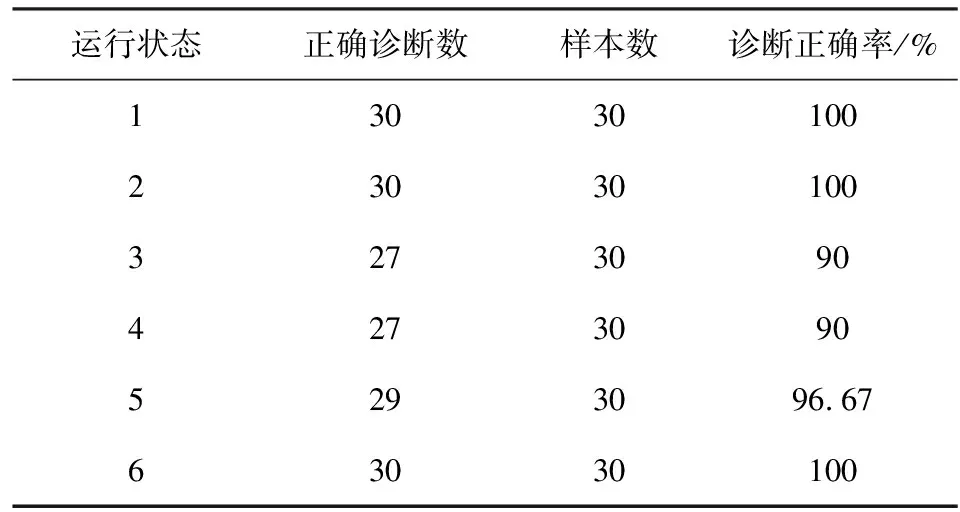
表4 故障診斷正確率
4 結論
本文使用AME Sim軟件建立10缸柴油機高壓共軌供油系統的一維仿真模型并提取軌壓信號,采用一種基于EEMD的信號分解方法,將軌壓信號分解為若干IMF分量與一個殘差,通過對比其過零點變化率篩選出所需IMF分量,并提取其能量構成特征向量,通過訓練建立相應的SVM模型并進行故障診斷,與其他故障診斷方法進行了對比,通過試驗數據對本方法進行了驗證。得出以下主要結論:
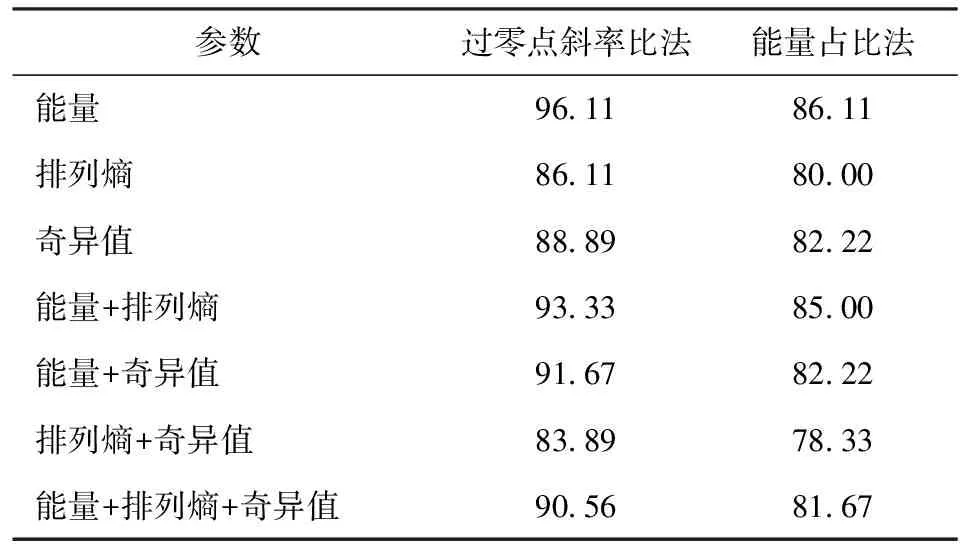
表5 不同方法的診斷正確率Tab.5 Diagnostic accuracies of different methods %

表6 EEMD與改進EEMD的診斷正確率Tab.6 Diagnostic accuracies of EEMD and improvedEEMD methods
1) 本文以EEMD-SVM為基礎的故障診斷方法可以對發生在高壓共軌系統的噴油器B延遲噴油故障、噴油器B電磁閥磨損故障、油泵柱塞磨損故障、共軌管入口處漏油故障和噴油器B入口處漏油故障等不同故障進行較為準確的診斷識別,其診斷正確率可以達到9611。
2) 相比其他特征值提取方法,本文采用的能量法更能反映共軌系統的狀態信息,采用過零點斜率比作為IMF分離依據更合適。在以能量作為特征值、過零點斜率比作為分離IMF依據的基礎上,改進的EEMD能夠獲得更高的診斷正確率。
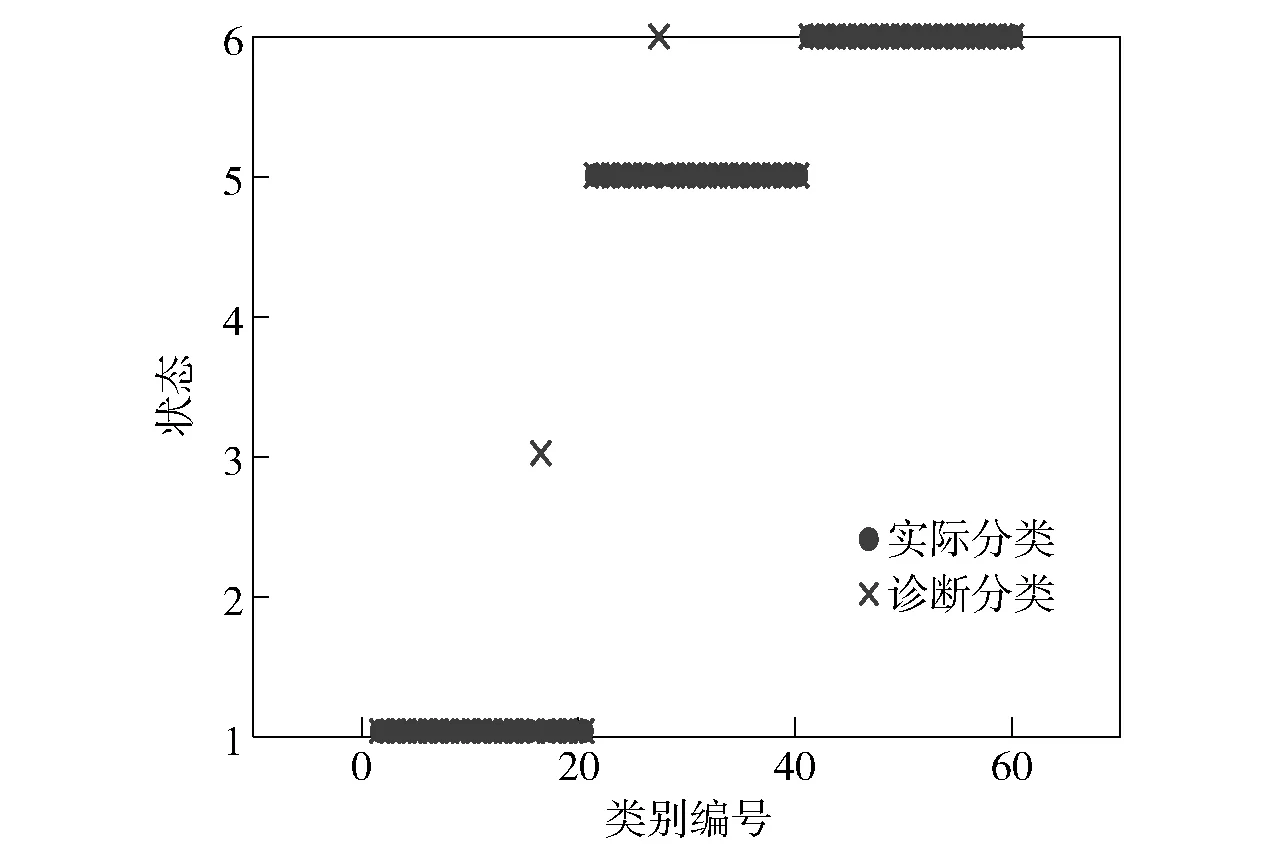
圖12 診斷結果Fig.12 Diagnostic results
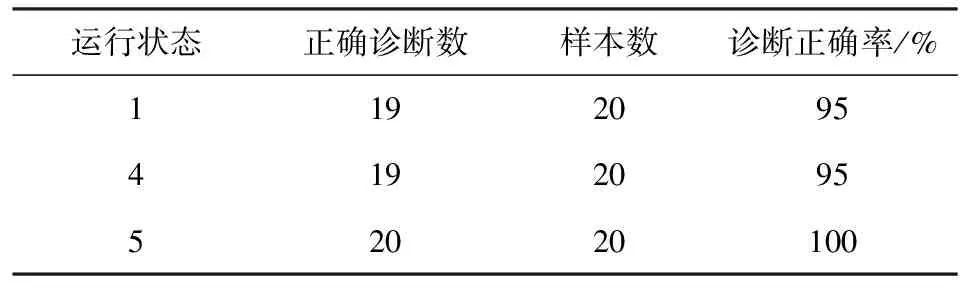
表7 故障診斷正確率
3) 在使用本文方法進行故障診斷時,錯誤診斷主要集中于噴油器電磁閥磨損故障狀態與油泵柱塞磨損故障狀態。主要原因可能是噴油器電磁閥磨損故障狀態與油泵柱塞磨損故障狀態的特征值向量和正常狀態的特征值向量相似度差異較小,導致個別信號不易正確診斷分類。今后在提高噴油器電磁閥磨損故障狀態與油泵柱塞磨損故障狀態的診斷精度方面,仍需進一步研究。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:25:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
