基于渦旋電磁波雷達的人體目標步態精細識別
2022-06-10 05:43:02袁航羅迎李開明陳怡君張群
兵工學報 2022年5期
袁航, 羅迎,2, 李開明, 陳怡君, 張群,2
(1.空軍工程大學 信息與導航學院, 陜西 西安 710077; 2.復旦大學 電磁波信息科學教育部重點實驗室, 上海 200433;3.西安電子科技大學 雷達信號處理國家重點實驗室, 陜西 西安 710071; 4.武警工程大學 信息工程學院, 陜西 西安 710086)
0 引言
由于雷達偵察距離遠,可全天時工作,受極端天氣影響較小,雷達成為主要的偵察手段之一。在身份檢測[1]、醫療救助[2]、軍事[3]等領域,關于基于雷達對人體目標步態識別進行了諸多研究,也取得了較多的成果。該類識別方法往往是基于目標徑向運動產生的線多普勒效應[4],利用不同方法提取特征,輸入分類器中獲得結果。常見的特征有散射特征、多普勒特征、平動特征等。文獻[5]將卷積神經網絡作為分類器,將回波時頻圖的幅度作為輸入,獲得人體目標的分類結果。文獻[6]通過距離- 多普勒幀和峰值搜索算法提取目標平動、多普勒、雷達散射截面積(RCS)特征,再將機器學習模型作為分類器,獲得結果。文獻[7]首先獲取目標雷達回波,再通過改變短時傅里葉變換的窗長,從而得到不同窗口長度下的時頻圖,再將時頻圖輸入到雙通道卷積神經網絡中,最終獲得識別結果。上述方法均使用傳統的平面電磁波雷達,并在此基礎上進行研究,其目標均為差異較大的人體運動(如行走、奔跑、跳躍、蹲下等)[8]。當人體運動軌跡相近(如擺雙臂行走、擺單臂行走、不擺臂行走)時,多普勒效應很相似,傳統方法難以準確分類目標。
與傳統電磁波相比,由于渦旋電磁波擁有螺旋形相位波前分布,其含有獨特的軌道角動量,獲取目標信息的能力顯著提高[9-10]。渦旋電磁波照射目標時,目標運動會產生線多普勒效應和角多普勒效應[11],線多普勒為雷達與目標的徑向相對運動引起的頻率偏移;角多普勒為雷達與目標的方位角相對運動引起的頻率偏移。當徑向運動相似時,利用角多普勒可取得更好的效果。由于渦旋電磁波的獨特性質,眾多渦旋電磁波生成方法被提出,常見的生成裝置有均勻圓環陣(UCA)[12]、相控陣[13]、螺旋反射面[14]等。渦旋電磁波雷達大多被應用于成像領域,取得了不錯的效果[15-17]。現有基于渦旋電磁波的人體步態識別研究較少,文獻[18]利用單頻渦旋電磁波照射目標,利用短時傅里葉變換獲得時頻圖,將時頻圖輸入到分類器中獲得結果。該方法直接利用單頻渦旋電磁波,并未將線多普勒與角多普勒分離。與線多普勒相比,角多普勒較微弱,易淹沒在線多普勒中,回波中的角多普勒并未被很好利用。
針對上述問題,本文利用線性調頻渦旋電磁波照射目標,獲得雙模態回波,利用雙通道卷積神經網絡模型預測結果。首先建立了人體目標的渦旋電磁波雷達回波模型;然后將回波變換到距離域,利用雙模態回波的互相干涉,抑制線多普勒,獲得角多普勒信息;再利用短時傅里葉變換獲得角多普勒和線多普勒的時頻圖,將時頻圖的幅度值作為特征,輸入到雙通道卷積神經網絡模型中,從而獲得分類結果。仿真結果表明,該方法可以對人體步態進行精細識別,并對噪聲具有一定的魯棒性。
1 渦旋電磁波雷達回波模型
近年來,由于渦旋電磁波的獨特性質,多種渦旋電磁波生成方法被提出。本文采用最常見的UCA裝置來生成渦旋電磁波。圖1所示為UCA與目標的幾何關系。圖1中,Oxyz為空間直角坐標系,在Oxy平面上存在一個以O為圓心、半徑為a的圓周,Orθφ為球坐標系,點目標p位于(x0,y0,z0)處,v為點目標p的速度矢量。Q個天線在圓周上等間距排列,第q個天線的相移為exp(iαφq),α為模式數,φq=2πq/Q,q=0,1,…,Q-1,雷達視線方向為z軸正半軸,i為虛數。
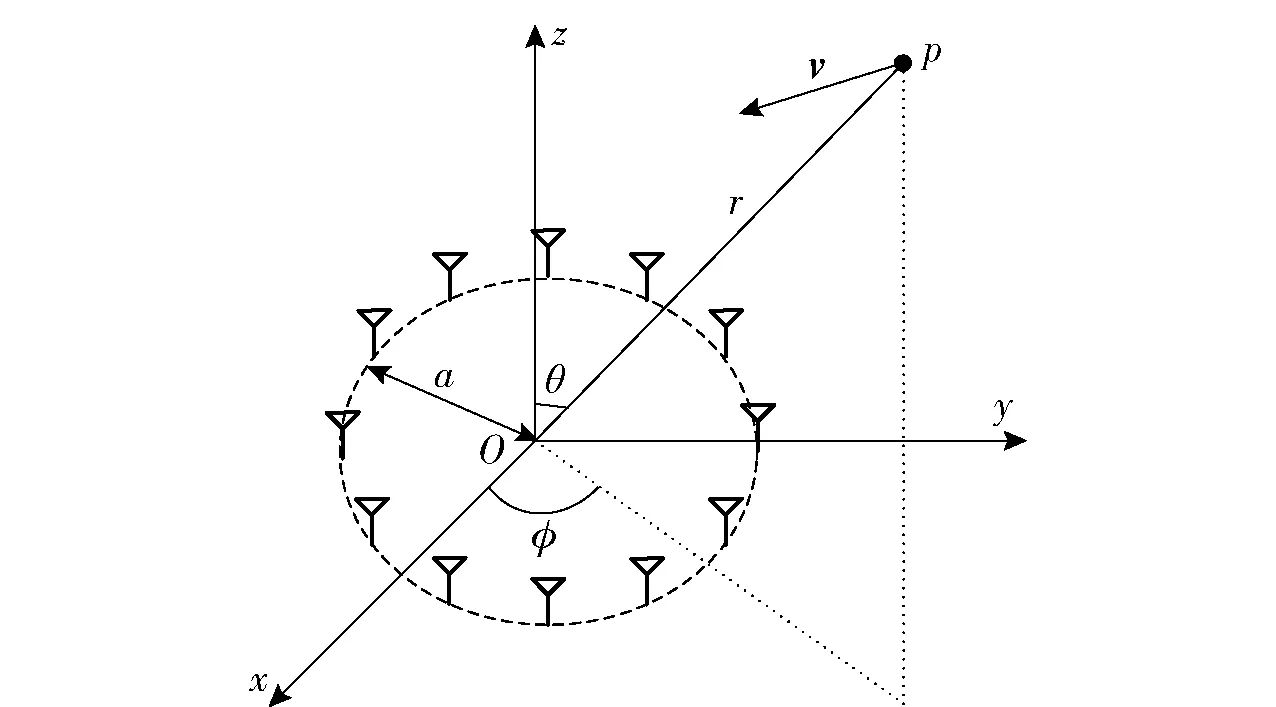
圖1 UCA與目標幾何關系示意圖Fig.1 Geometric relationship between UCA and target
則點目標p的運動軌跡為
(xp(t),yp(t),zp(t))=(x0+vxt,y0+yyt,z0+vzt)
(1)
式中:vx、vy、vz分別為速度矢量v在x軸、y軸、z軸3個方向的分量。p點在球坐標系(r,θ,φ)下的位置為
(2)
式中:θp(t)∈[0,π];φp(t)∈[0,2π)。雷達發射線性調頻信號,第p個散射點的點回波[14]可表示為

(3)
式中:σp為散射系數;Jα為第一類α階貝塞爾函數;k(t)=2π(fc+γt)/c,fc為載波頻率,γ為調頻率,c為光速;τp(t)=2rp(t)/c,rp為第p個散射點到雷達的距離;TP為脈沖持續時間;rect(·)為矩形窗函數。將s(t,α)乘以參考信號sref(t)=exp (-i2π(fct+0.5γt2)),獲得sp(t,α),其表達式為

(4)

(5)
假設在ts時刻,散射點p位于空間直角坐標(x0,y0,z0)處,且在時間Δt內的瞬時速度矢量為(vx,vy,vz),則該時刻的瞬時角多普勒頻率fA[11]為
(6)
角多普勒頻移由目標位置矢量和速度矢量到Oxy平面的投影決定。
2 人體回波生成
人體可視為由多個不規則區域組成的集合,當雷達信號照射人體時,多個區域的回波相互疊加,雷達散射截面積的計算異常復雜。為便于分析及仿真,可利用橢球體近似模擬人體各區域[6]。此時人體被簡化為14個橢球體(見圖2),簡化模型[6]如圖2(a)所示。圖2(b)中,Los為雷達視線方向,αR、βR為雷達視線方向在球坐標系下的角度,dn為第n個橢球體長軸的方向矢量,φR,n為橢球體長軸與雷達視線方向的夾角。
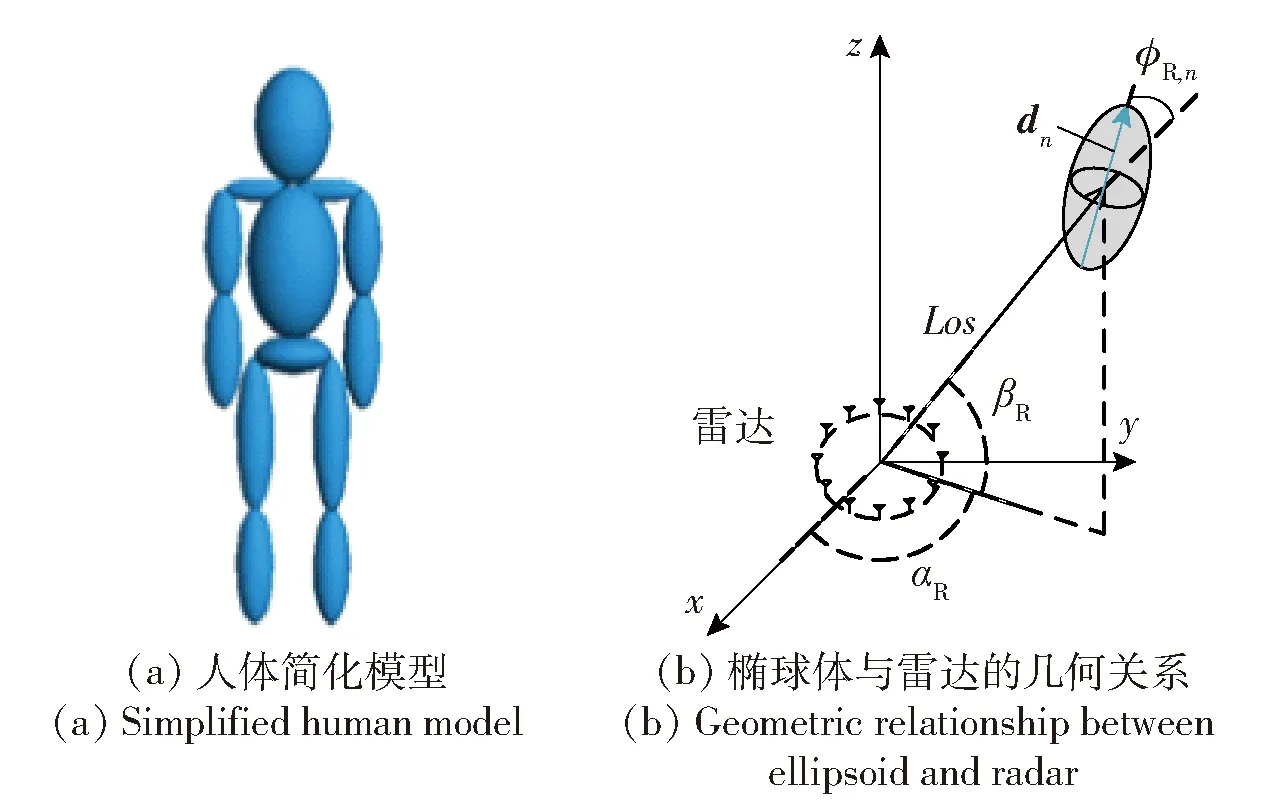
圖2 橢球體模型Fig.2 Ellipsoid model
雷達視線方向為
Llos=[cosαRcosβR,sinαRcosβR,sinβR]
(7)
則φR,n可由(8)式計算:
(8)
式中:〈〉表示內積;‖‖2為2-范數。在全局坐標系下,第n個橢球體的RCS計算公式[19]為
(9)
式中:an、bn、cn為第n個橢球體的3個半軸。設雷達到第n個橢球體質心的矢量為mn。由于角多普勒與目標方位角有關,定義兩個單位向量L2、L3,構成雷達平面,
L2=[-sinαR,cosαR,0]
(10)
L3=[-cosαRsinβR,-sinαRsinβR,cosβR]
(11)
目標投影到L2、L3的大小為
p2,n=〈mn,L2〉
(12)
p3,n=〈mn,L3〉
(13)
可計算出
(14)
(15)
式中:θn(ts)為第n個橢球體球心矢量的俯仰角。
則人體14個區域總回波為
(16)
3 回波信號處理


(17)
式中:H(f)=sinc(Tpf)?F(f),?為卷積操作。H(f)與sinc函數的性質類似,其絕對值為

(18)
(19)
為獲取回波中的角多普勒信息,需要利用雙模態回波
(20)
線多普勒和角多普勒相互耦合,為提取目標角多普勒,將(20)式中的雙模態回波共軛相乘,
(21)
式中:上標*代表共軛操作。
當γτp(ts)≈γτk(ts)時,設有L個區域處于同一距離單元,此時f=γτl(ts),l為某個距離單元,距離對于幅度的影響較小。該距離單元的信號可表示為
(22)
目標時頻圖如圖3所示,圖3(a)為目標線角多普勒混合時頻圖,圖3(b)為目標線多普勒時頻圖,圖3(c)為目標角多普勒時頻圖。在分離前,角多普勒對時頻圖的影響較小。由于共軛相乘操作,其線多普勒被抑制,角多普勒凸顯。圖3(c)中的波峰為目標手臂擺動引起的角多普勒頻移,與線多普勒時頻圖相比,其信息更為突出。同時,為利用目標的線多普勒信息,將s(f,tm,α)作為線多普勒。

圖3 時頻圖Fig.3 Time-frequency diagram
為更好地識別目標,需要對上述信號進一步處理,用時頻圖來表征信號。常用的時頻變換方法有短時傅里葉變換、Gabor變換和小波變換等。文獻[20]利用短時傅里葉變換來獲得目標時頻圖,短時傅里葉變換的過程可表示為
(23)
式中:u的長度決定短時傅里葉變換的時頻分辨率;w(·)為窗函數,不同窗函數有不同的效果。選擇合適的窗長來表達目標的時頻特性。
4 識別模型
近年來,卷積神經網絡廣泛應用于雷達圖像分類任務中[19,21-22],取得了一系列較好的成果。現有的算法大多是在基于卷積神經網絡模型的基礎上,再將提取到的目標深層次信息輸入到模型中,取得分類結果。本文利用的深度學習模型結構如圖4所示。圖4中,模型由卷積層、池化層、批規范化層、Softmax層和全連接層組成,主體部分為雙通道的5層卷積神經網絡;Conv代表一層卷積核大小為9×9、步長為1卷積層;批標準化(BN)為批規范層;ReLU為損失函數;Pool表示該層為池化大小和步長都為2的池化層;Concatenation為拼接操作,將兩通道的輸出拼接起來,輸入到全連接層。
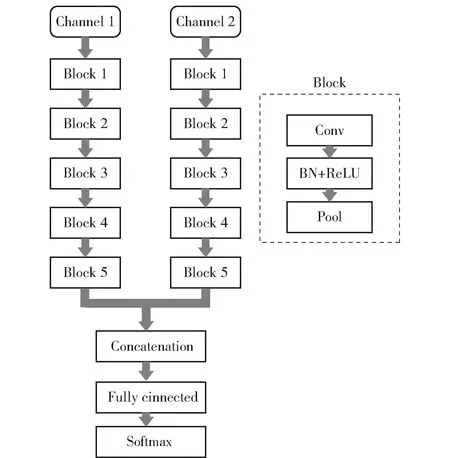
圖4 識別模型Fig.4 Recognition model
算法分類過程可簡單表述為:首先將時頻圖的幅度值輸入到兩個通道中,時頻圖經過5層網絡后,拼接其輸出,輸入到全連接層中,最后將全連接網絡的輸入到Softmax層,獲得分類結果。該模型的激活函數為ReLU函數。假設輸入到Softmax函數的數組為zj,j=1,2,…,J,Softmax層的輸出表達式為
(24)
Softmax層的輸出為(0,1)范圍內的值,該層輸出之和為1。該數值可表征分類結果,其數值越接近1,代表某個目標為真的可能性越大。Softmax層輸出的向量長度代表待分類目標數,若為1×3階的向量,則代表模型對三類目標進行預測。為衡量預測輸出與標簽的差異,需要通過損失函數量化。先將目標標簽以one-hot碼表示,再通過損失函數計算損失,損失函數可表示為
(25)
式中:P(xj)為xj的實際概率分布;q(xj)為輸入xj時模型分類結果。當實際概率分布和模型分類結果越接近,則損失越小。通過不斷優化,預測正確率逐漸增大。算法流程圖如圖5所示,先對回波作關于快時間的傅里葉變換,在距離域分離信號;再利用雙模態回波,對目標進行干涉處理,提取距離域的峰值信號;最后利用短時傅里葉變換,獲得目標線多普勒和角多普勒時頻圖,將時頻圖輸入到分類器中,獲得分類結果。
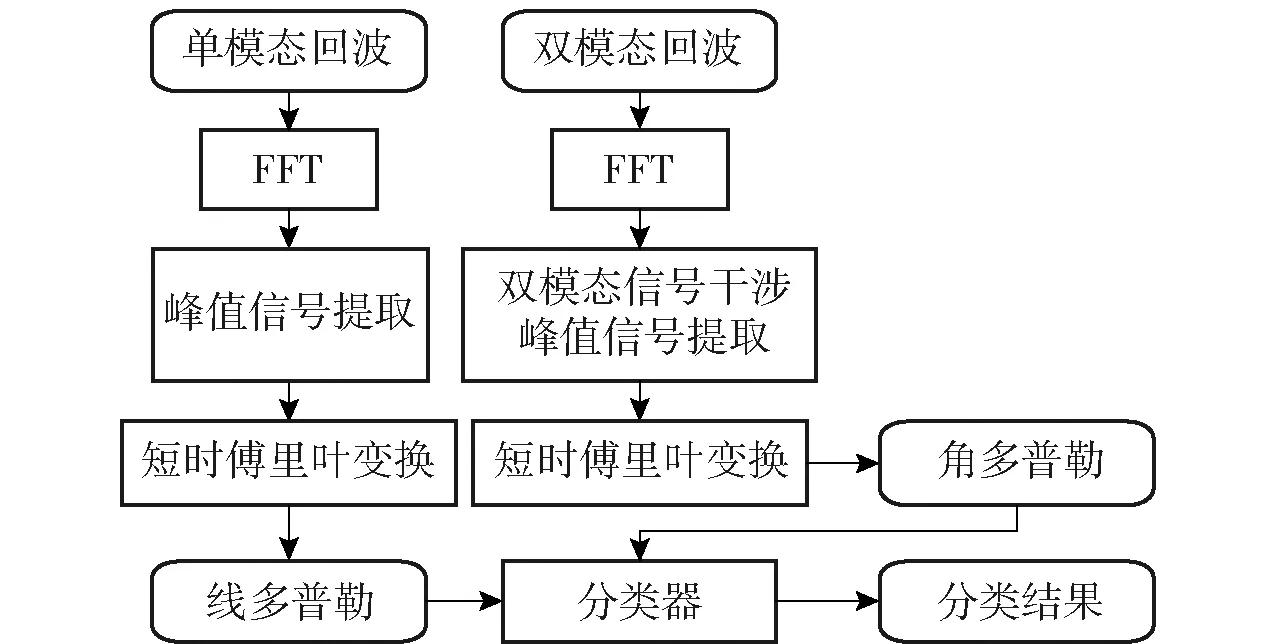
圖5 算法框圖Fig.5 Algorithm block diagram
5 仿真結果
雷達參數設置如表1所示。人體目標的身高設置為1.6~1.8 m,行走方向隨機,行走速度為2~4 m/s,初始位置距雷達中心1 500~1 600 m,雷達視線方向為αR=0.5π rad,βR=0 rad。

表1 雷達參數Tab.1 Radar parameters
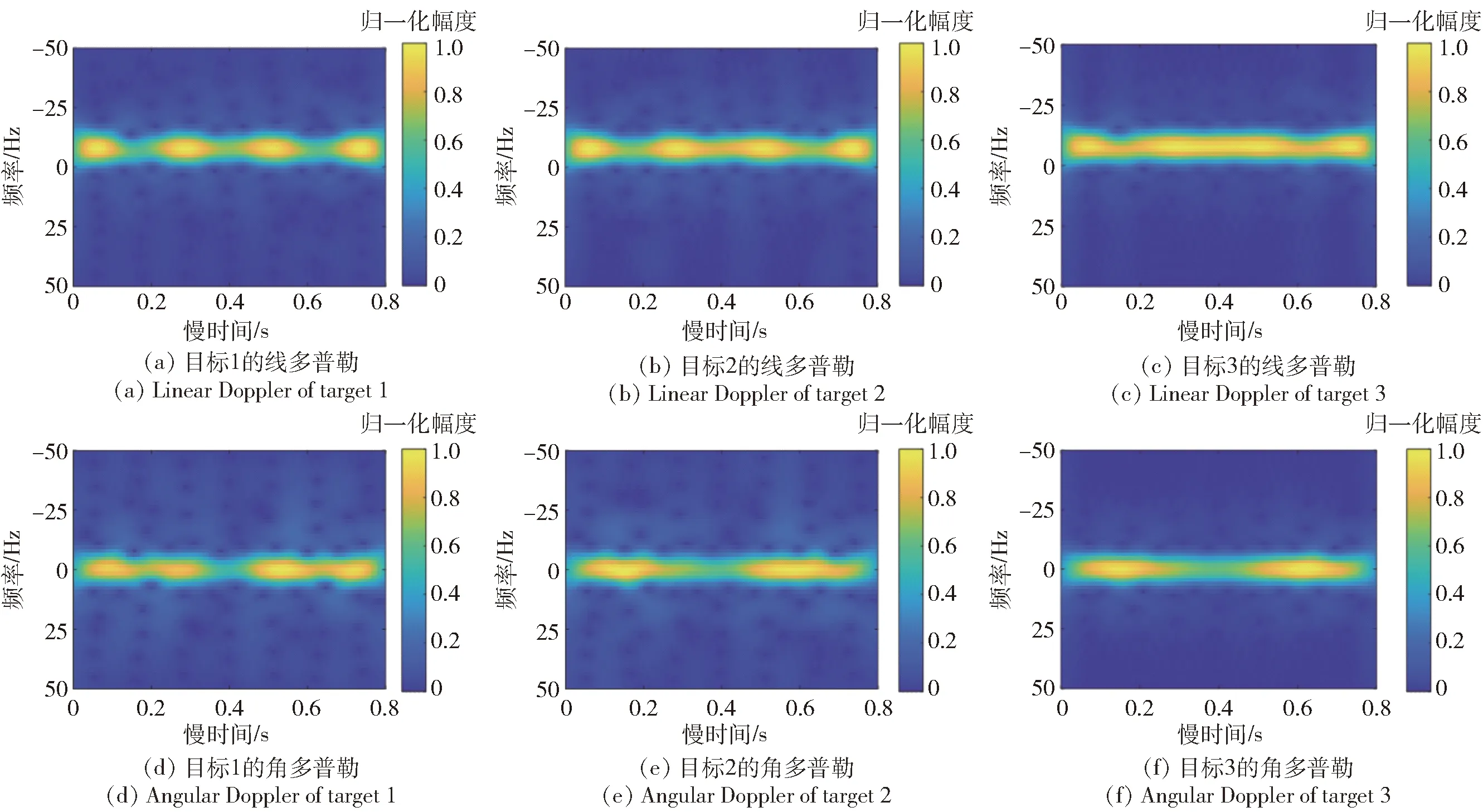
圖7 目標時頻圖Fig.7 Time-frequency diagram of target
三類目標的行走過程如圖6所示。目標1為正常擺雙臂行走;目標2為右手相對靜止,左臂正常擺動;目標3為雙手置于胸前,與身體保持相對靜止。三類目標的腿部動作一致,區別在于雙手狀態的不同。三類目標的時頻圖如圖7所示,圖7(a)、圖7(b)、圖7(c)為三類目標的線多普勒時頻圖。由于目標2和目標3手臂與身體相對靜止,其多普勒效應與軀干相似,目標主體多普勒效應增強。從中可以發現:圖7(a)和圖7(b)的主體多普勒較為相似,背景不同,其多普勒頻移主要由雙臂擺動造成。由于目標3中雙臂與身體相對靜止;圖7(c)的時頻圖更光滑,其多普勒頻移主要由雙腿擺動造成。圖7(d)、圖7(e)、圖7(f)分別為三類目標的角多普勒時頻圖,與線多普勒相比,角多普勒呈現出更多信息。由于雙臂同時擺動,圖7(d)的角多普勒明顯,時頻圖背景也較為復雜,一個周期內角多普勒存在兩處峰值。圖7(e)為擺單臂行走,其角多普勒時頻圖背景復雜度較低,角多普勒主要由腿部和單臂擺動造成,一個周期內角多普勒存在一處峰值。圖7(f)為雙臂靜止行走,與圖7(d)和圖7(e)相比,其時頻圖背景最為簡單,角多普勒主要由軀干移動和腿部擺動造成。
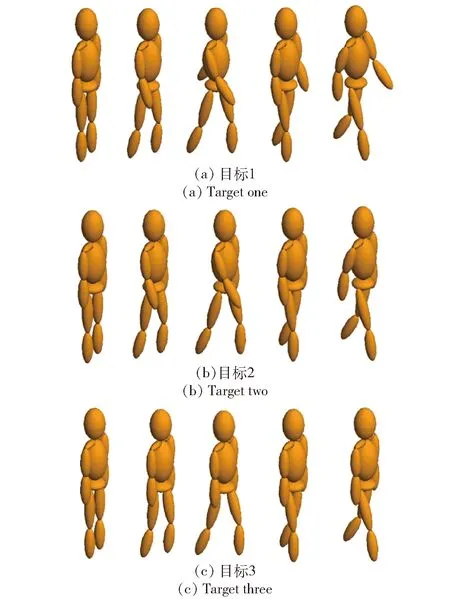
圖6 不同時刻下的行走過程Fig.6 Walking process at different times
為驗證將線多普勒、角多普勒分離的優勢,仿真中將目標的線多普勒和角多普勒的混合信息、線多普勒和角多普勒分離信息和角多普勒信息輸入到同一個識別模型中,從而獲得不同輸入下的分類結果,如表2所示。表2中,線角分離為分別利用線多普勒和角多普勒特征;線角混合為不將線多普勒和角多普勒分離[18],直接輸入分類器中;角多普勒為只利用角多普勒信息,將線多普勒信息拋棄。由于角多普勒遠小于線多普勒,線角混合的方法并不能取得最好的效果。同時,角多普勒并不能全面反映目標信息,只利用角多普勒的方法難以獲得很好的分類性能。由于角多普勒中含有額外的目標信息,通過聯立角多普勒信息和線多普勒信息,可以有效提高識別能力。將線多普勒和角多普勒分離后,有益于準確識別人體精細步態目標。
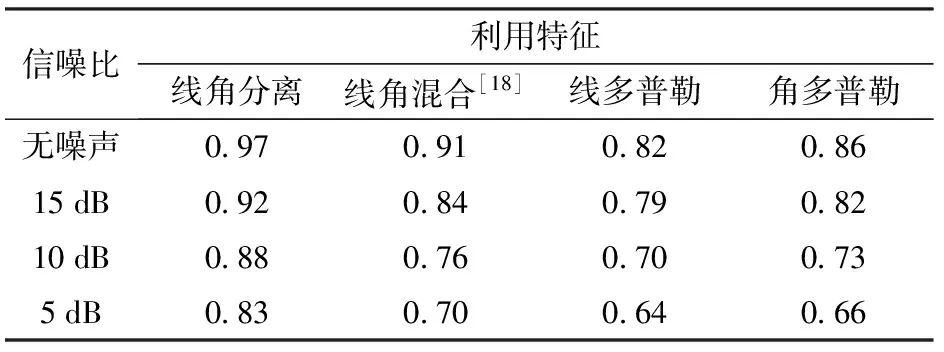
表2 仿真結果Tab.2 Simulated result
數據集共含有2 000個數據,目標1、目標2、目標3分別為666、667、667個。無噪聲條件下的識別混淆矩陣展示在表3中,模型對1類目標的識別率最高,2類目標的識別率最低。在實際中,回波中必然存在各類噪聲。為驗證本文方法在有噪條件下的性能,為回波中加入復高斯白噪聲,使信噪比為5 dB、10 dB、15 dB。對不同信噪比下表2方法的表現進行仿真實驗,結果如表3所示。由表3可見,由于利用了目標在不同域的表示,線多普勒和角多普勒被輸入到分類器中,其魯棒性更好。
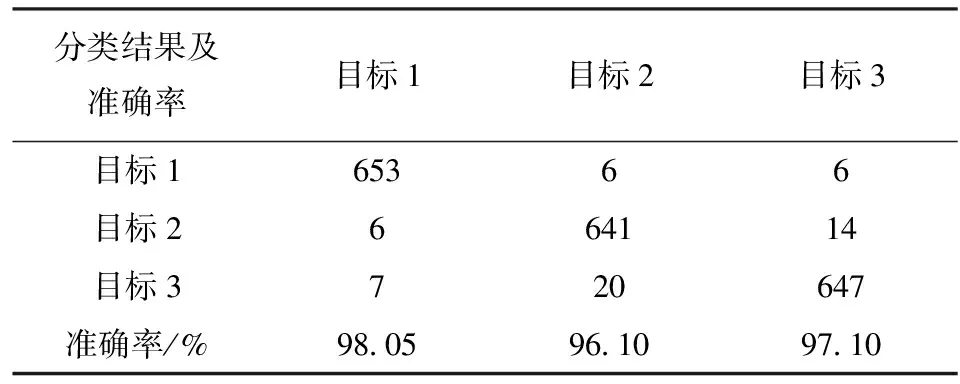
表3 無噪聲下的識別混淆矩陣Tab.3 Recognition confusion matrix without noise
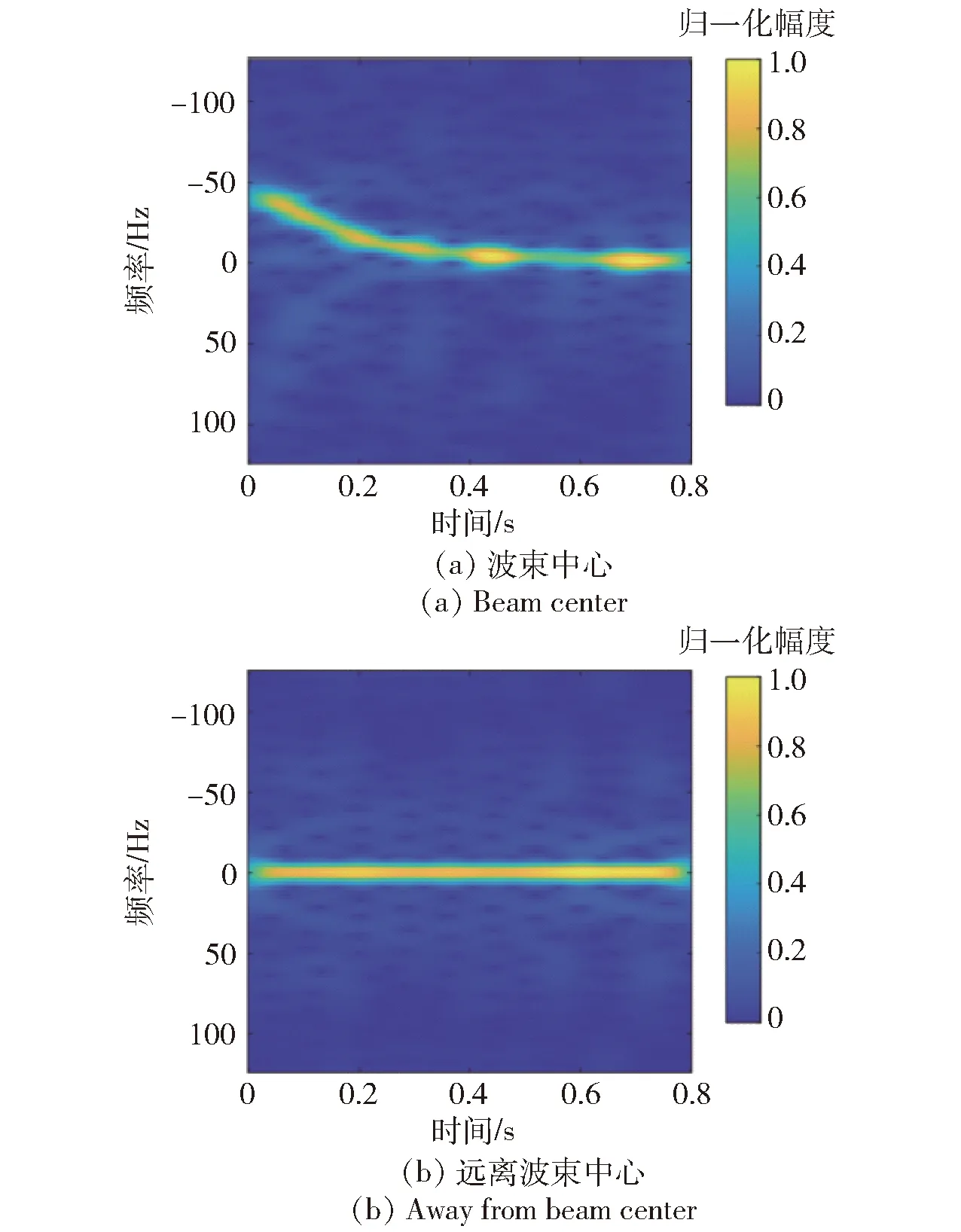
圖8 角多普勒時頻圖Fig.8 Time-frequency diagram of angular Doppler
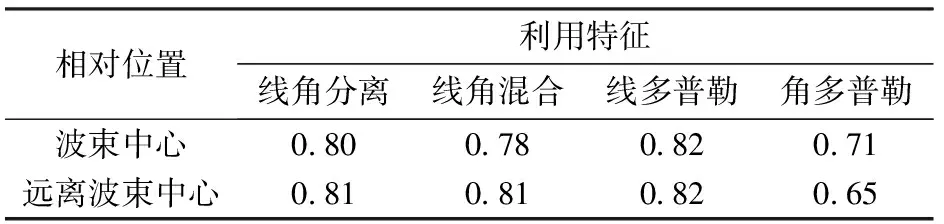
表4 相對位置對識別率的影響
6 結論
1)利用渦旋電磁波而不是傳統電磁波,可提高人體步態精細目標的識別準確率。
2)將渦旋電磁波中的線多普勒信息和抑制線多普勒后的角多普勒信息分別作為輸入,可進一步提高識別準確率。
3)將線多普勒和角多普勒徹底分離,有望獲得更高的識別準確率。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中等數學(2022年2期)2022-06-05 07:10:50
中學生數理化·七年級數學人教版(2021年11期)2021-12-06 05:38:48
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
小學生學習指導(低年級)(2020年6期)2020-07-25 02:31:36
數學物理學報(2020年2期)2020-06-02 11:29:24
小學生學習指導(低年級)(2018年9期)2018-09-26 05:59:44
瘋狂英語·新讀寫(2018年2期)2018-09-07 09:32:10
數學小靈通·3-4年級(2017年6期)2017-06-22 11:28:50
光學精密工程(2016年6期)2016-11-07 09:07:19
