
球窩型總壓探針氣動結構選型分析研究
2022-06-10 12:15:46王玉芳董素艷荊卓寅
中國測試 2022年5期
關鍵詞:結構
王玉芳,董素艷,荊卓寅,趙 儉
(1. 中國航空工業集團有限公司北京長城計量測試技術研究所,北京 100095; 2. 西北工業大學,陜西 西安 710072)
0 引 言
作為接觸式測量方法,總壓探針憑借其方便、可靠的特點在航空航天氣動流場測量領域有著非常廣泛的應用。目前常用的總壓探針有三種結構形式,分別為L型探針、帶套筒型探針以及球窩型探針[1]。這三種結構總壓探針其特點各不相同,其中L型探針結構簡單,但不敏感角度小;帶套筒型探針測量性能優于L型,但其結構較為復雜,尤其套筒直徑相對較大,增大了其使用安裝不便性;球窩型探針測量性能相對其他兩種最佳,且結構簡單便于安裝,唯一的缺點是對加工精度要求較高。隨著這些年機械加工技術的發展,球窩型壓力探針的缺點被大大減小,其整體的實用性有著顯著提高[2-4]。
Zilliac[5]和Timothy[6]通過一種新的壓力探針結構的通用分析模型,并通過將其與三孔偏航坐標方法和七孔探針的實驗測量校準數據進行比較,證明了該模型的有效性可應用于壓力探針在氣動流場測量中的校準。Saravana[7]采用不同的湍流模型對S管道的對應測點位置總壓恢復參數進行仿真計算,并對比流場內是否加總壓探針的仿真計算,結果表明,采用k-omega湍流模型仿真計算得到的總壓恢復系數與實驗值比較接近;同時,流域內添加總壓探針模型與不添加探針模型相比仿真結果更為可靠。沈天榮[8]等采用不轉動法校準L型七孔壓力探針,對校準結果進行分析,發現對于大部分校準點通過插值算法得到測量結果與真實值比較一致誤差范圍不超過0.5%。馬宏偉[9]等研究了速度梯度、近壁效應和雷諾數對壓力探針測量誤差的影響,結果表明,橫向梯度能引起偏轉角測量誤差;縱向梯度能引起俯仰角測量誤差;梯度使氣流方向測量值向負梯度方向偏轉。圓柱探針和錐形多孔探針相比,氣流方向測量誤差對速度梯度更敏感,縱向梯度對俯仰角測量值的影響尤其大。趙彬[10]等對超音速下總壓探針進行數值仿真研究,總壓探針位置、壓力、馬赫數等幾個關鍵參數對總壓恢復系數的影響規律,并與實驗結果進行對比,結果表明安裝位置對總壓探針的恢復系數影響最大,探針越靠近試驗段前方,總壓系數絕對值越小。鄭光華[11]等基于計算流體力學方法,研究了兩種不同結構形式(單點、四點梳狀)的總壓探針對被測流場及自身總壓測量值造成的影響差異。結果表明隨著堵塞比的增大,各測點的總壓測量誤差增大;隨著馬赫數的增大,各測點的總壓測量誤差增大。Bubeck[12-13]等通過對球窩五孔探針的試驗研究,發現該類型探針在近壁端測量時發現近壁測量時探針的俯仰角測量值存在誤差,偏離值為5°。陳金華[14]研究了超音速流場中影響總壓探針角度特性的因素及其影響規律,結果表明對于圓柱外形帶圓錐內腔的總壓探針,其內腔半錐角越小,敏感角度越大。冷旭明[15]等研究了總壓管對超音速流場結構的影響,并得到了利用總壓管測量超音速自由射流流場結構時,在一定區域內誤差較小,但在超音速向亞聲速過渡的區域內誤差卻較大的結論。
綜上所述,總壓探針的測量準確性對于獲得流場相關參數至關重要。在實際測量過程中,由于安裝誤差或無法確定的氣流來流方向,使得氣流不敏感角對總壓探針的測量誤差產生重要的影響。本文依據氣動壓力探針的傳統設計方法,同時,結合計算流體力學方法,對球窩型壓力探針進行結構優化設計研究,并通過風洞實驗對優化設計方案進行驗證,研究出適合于工程實際應用的最佳球窩型壓力探針結構方案。
1 結構優化方案
1.1 方案1——球窩型標準結構
球窩型總壓探針標準結構如圖1所示。其中,球窩半徑R和套管直徑D滿足R/D= 0.4~0.6的球窩設計要求,一方面,避免球窩尺寸過小,測量過程效果不明顯,另一方面,避免球窩尺寸太大,測量結果受圓柱繞流的流場影響。球窩球心到支桿端頭的距離h應滿足h>2D設計要求,以避免支桿端頭對球窩附近流場的影響。套管壁厚設計為c=(2/3)R,并將感壓孔開在支桿上,由于沒有突出部分,安裝尺寸較小,同時也改善了機械強度。具體結構尺寸,球窩內徑:3 mm;孔口內徑:2 mm;管壁厚度:2 mm;球窩球心到支桿端頭距離:6 mm;套管直徑:6 mm。
1.2 方案2——球窩型偏心小內徑結構
方案2結構在方案1標準結構的基礎上,減小孔口內徑為其1/2,同時將支桿內孔設計為偏心結構,主要為探究孔口尺寸以及偏心結構對不同敏感角下球窩附近流場的影響及測量偏差規律。具體結構尺寸如圖2所示,球窩內徑:3 mm;孔口內徑:1 mm;球窩球心到支桿端頭距離:6mm;套管直徑:6 mm。

圖2 球窩型偏心小直徑結構
1.3 方案3——球窩型兩側削平結構
方案3結構在方案1標準結構的基礎上,對球窩至支桿頭部的圓柱兩側面進行削平處理,切削深度為1 mm,主要為探究球窩附近非圓柱繞流流場情況對不同不敏感角下總壓探針的測量誤差影響規律。同時,考慮削平兩側圓柱桿后探針的機械強度,減小其內孔孔徑,增大球窩至支桿頭部的管壁厚度。具體結構尺寸如圖3所示,球窩內徑:3 mm;孔口內徑:1 mm;切削深度:1 mm;球窩球心到支桿端頭距離:6 mm;套管直徑:6 mm。
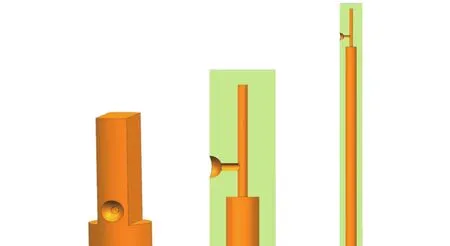
圖3 球窩型兩側削平結構
1.4 方案4——直孔型3 mm孔徑結構
方案4結構針對方案1標準結構,改變球窩型結構方式為直孔型,同時孔徑改為3 mm。由于標準結構其球窩結構在加工過程中難以精確控制,滿足要求的成品率較低,因此,該結構設計主要目的是考慮降低加工過程的復雜度。具體結構尺寸如圖4所示,直孔內徑:3 mm; 孔口內徑:1 mm;切削深度:1 mm;直孔中心到支桿端頭距離:6 mm;套管直徑:6 mm。

圖4 直孔型3 mm孔徑結構
1.5 方案5——直孔型4 mm孔徑結構
方案5結構在方案4的基礎上改變孔徑為4 mm。具體結構尺寸如圖5所示,直孔內徑:3 mm;孔口內徑:1 mm;切削深度:1 mm;直孔中心到支桿端頭距離:6 mm;套管直徑:6 mm。
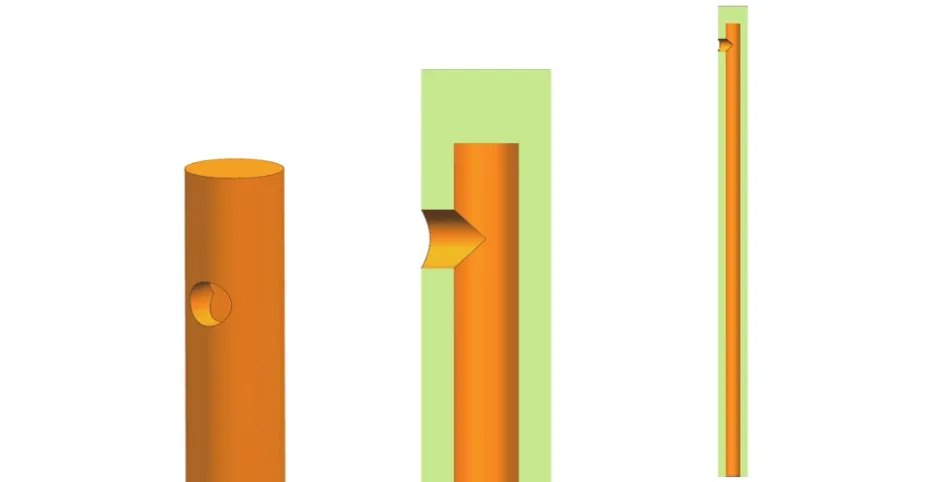
圖5 直孔型4 mm孔徑結構
2 數值仿真方法
2.1 計算域
五種結構的總壓探針仿真計算,除結構尺寸不同外,計算域及計算工況完全相同,計算域如圖6所示,整個計算域的設定截取實際實驗室常溫風洞的對應測試流域。

圖6 流場仿真計算域
2.2 網格劃分
本文采用多面體網格劃分,多面體網格在保證相同計算精度的同時,其網格數量相比較四面體或混合網格少3~5倍,從而使數值計算解收斂更快,并且節省計算資源;同時,對總壓探針壁面以及周圍流場進行網格加密如圖7所示,網格最小尺寸為0.04 mm,網格最大尺寸為6.00 mm。對總壓探針壁面處劃分邊界層,邊界層層數為7層,生成網格的總數量約為600萬,整體流域截面網格示意圖如圖8所示。
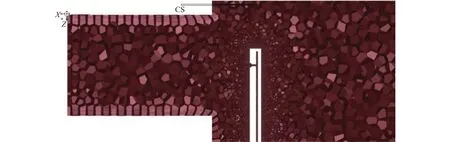
圖7 總壓探針網格加密展示

圖8 總壓探針整體流域截面網格展示
2.3 數值求解方法
本文中湍流模型采用Realizable k-e Model。主要考慮以下方面:該模型對較強壓力梯度、圓柱繞流等問題計算精度更好;同時,本數值模擬亞音速流速,流動介質為理想空氣,因此,湍流模型中考慮可壓縮性影響。由于可壓縮流動,其速度、密度、壓力及能量之間的高度耦合,一方面耦合會導致解的不穩定性,同時,計算低馬赫數條件下可壓縮流動易引入過大的截斷誤差,綜合考慮以上問題,該數值模擬過程采用以下離散格式:梯度基于單元體的最小二乘法差值格式;壓力、密度、動量、湍動能、湍耗散率、能量的離散方法均采用二階迎風格式,主要考慮低階格式帶來過大截斷誤差的缺點。采用SIMPLE半隱式格式求解。
2.4 計算工況
總壓探針計算邊界條件:環境溫度:300.0 K;來流馬赫數:0.42;來流總壓:13 073.15 Pa;參考壓強:101 325.00 Pa。
由于在數值仿真中不存在安裝誤差,氣流與模型正方向偏15°,與偏–15°兩種情況完全對稱,因此,實際仿真時僅考慮其中一種情況:氣流與模型正方向偏15°。在此基礎上,建立以下6個計算工況來探究球窩型壓力探針設計的最佳優化方案:
case 0:球窩型標準結構,氣流方向與模型正方向偏 0°;
case 1:球窩型標準結構,氣流方向與模型正方向偏 15°;
case 2:球窩型偏心小內徑結構,氣流方向與模型正方向偏15°;
case 3:球窩型兩側削平結構,氣流方向與模型正方向偏15°;
case 4:直孔型孔徑3mm結構,氣流方向與模型正方向偏15°;
case 5:直孔型孔徑4mm結構,氣流方向與模型正方向偏15°。
3 試驗驗證
3.1 試驗系統
如圖9為北京長城計量測試研究所國家重點實驗室低速風洞示意圖,主要包括離心式風機、壓力傳感器、數字無汞氣壓計、數采模塊、壓力掃描閥等設備。離心式風機把周圍空氣抽到氣罐中,然后經過入流管道給試驗段供氣。入流空氣首先進入穩定段內,然后經過收縮段,流入試驗段。
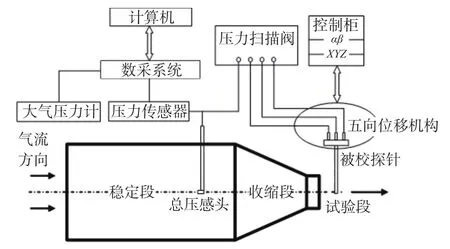
圖9 校準系統原理圖
3.2 測試方法
1) 對校準實驗中用到的壓力傳感器進行現場檢查;
2) 將被校支板后氣流角受感部固定在位移機構上,將測量孔對準風洞試驗段出口中心,測量孔到風洞試驗段出口的安裝距離為20 mm;
3) 連接各個壓力接頭至相應的壓力傳感器,確保沿程無漏氣;
4) 按照校準系統原理圖連接校準試驗系統;
使用SPSS 17.0軟件,利用卡方檢驗法對2個班的總評成績以及期末考試試題中每種題型的得分情況進行統計學分析.所有統計分析均采用0.05顯著性水平.
5) 運行風洞,調整馬赫數到預定的工況;保持該工況,按要求尋找氣動零點,記錄位移機構在氣動零點的位置,完成后調整位移機構回到機械零點;
6) 調整風洞到預定工況點,保持氣流馬赫數;
7) 調整位移機構改變探針方向夾角,在調整角度時,應保證探針頭部位置始終位于風洞核心區內;
8) 待探針壓力數據穩定后,開始數據采集,記錄此時的總溫、風洞總壓、風洞靜壓、大氣壓、被校探針的輸出壓力于原始數據表格中;
9) 重復程序7)和8),進行該工況點其他夾角的校準。
3.3 數據處理方法
3.3.1 氣流馬赫數Ma
式中:p0——穩定段氣流總壓,Pa;
3.3.2 總壓系數K0

其中pb為試驗段氣流靜壓,Pa。
3.4 測試工況
本文為驗證數值仿真的準確性,選擇方案1中球窩標準結構探針加工成實驗件如圖10所示,在與2.4節case1工況相同的條件下進行不同敏感角度(–15°、–10°、0°、10°、15°)測試。
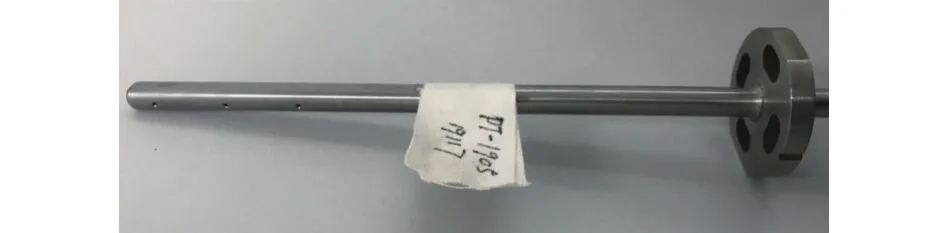
圖10 壓力探針結構試驗件
4 結果分析
4.1 網格無關性驗證
為驗證數值仿真網格無關性,本文通過對球窩型標準結構氣流偏轉角為0°、15°兩種流域分別劃分200萬、400萬、600萬、800萬網格數量進行仿真。
如圖11所示,可以看出在球窩型標準結構氣流偏轉角為0°時,測壓偏差隨網格數量的增大而變化較小,其相對變化范圍在1%以內,因此,該仿真條件下,200萬網格模型即可達到仿真結果與網格數量無關;而在球窩型標準結構氣流偏轉角為15°時,隨著網格數量的增大,測壓偏差逐漸減小,且在網格量600萬后,測壓偏差的變化范圍保持在1%以內。因此,本文采用600萬網格探針模型網格劃分及加密方法對其余探針模型的不同工況進行網格劃分及數值仿真即可實現仿真結果與網格數量無關。
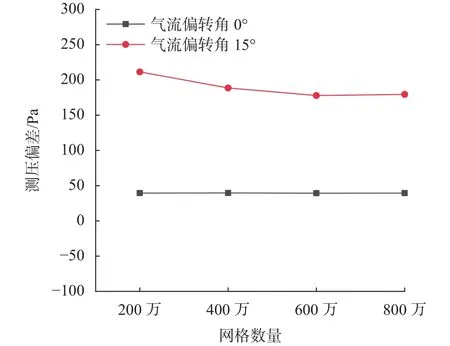
圖11 不同氣流偏轉角下網格數量對測壓偏差影響
4.2 仿真結果驗證
為驗證數值仿真方法的準確性,本文對試驗件測試結果與600萬網格量模型同工況下仿真結果進行對比。如表1所示,總壓為114 398 Pa,來流馬赫數0.42情況下,氣流偏轉角從–15°到15°測試結果。可以看出,在總壓及馬赫數不變的情況下,隨著氣流偏轉角絕對值的增大,測點壓差也隨之增大,流速隨之減小,這一規律符合可壓縮氣體動量方程;且隨著氣流偏轉角的增大,其總壓系數隨之增大,尤其在氣流偏轉角大于10°時,氣流偏轉角±15°總壓系數約為氣流偏轉角±10°的3倍,且其值遠大于0.1%。同時,由于試驗過程安裝誤差等原因,導致相同氣流偏轉角不同偏向的情況下總壓系數不同,負向偏轉角總壓系數大于相同角度正向偏轉角的值,且隨著偏轉角度越大,不同轉向之間的誤差越大。
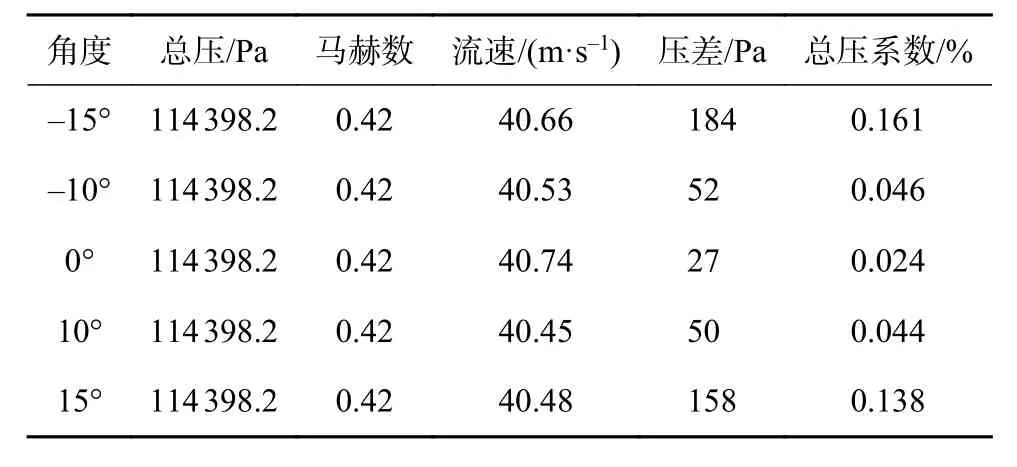
表1 不同氣流偏轉角下測試結果
因此,本文在驗證數值仿真結果時為消除這種實驗誤差,對正向偏轉角與負向偏轉角取平均值與仿真結果對比,如圖12所示。可以求得,在氣流偏轉角為0°時,數值仿真結果與試驗結果相對誤差為3.70%;在氣流偏轉角為15°時,數值仿真結果與試驗結果相對誤差為4.91%。綜上,數值仿真結果與試驗結果相對誤差小于5%,表明數值仿真所采用的計算方法正確可信。
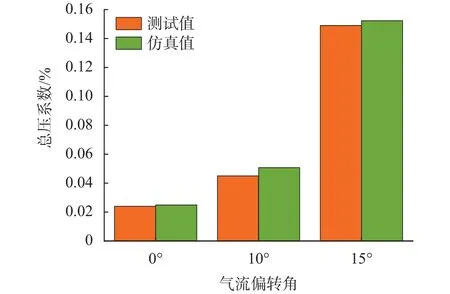
圖12 不同偏轉角下總壓系數測試值與仿真對比
4.3 不同結構數值仿真結果分析
對球窩型偏心小內徑結構總壓探針進行數值計算,分別給出縱向截面的總壓云圖、靜壓云圖,橫向截面的速度云圖,球窩附近的速度矢量圖,如圖13~圖16所示。
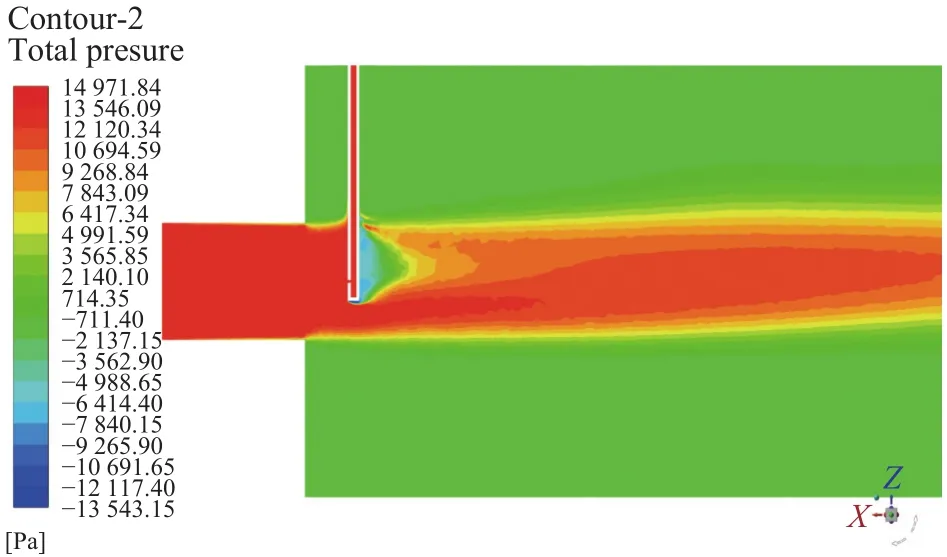
圖13 縱向截面總壓云圖
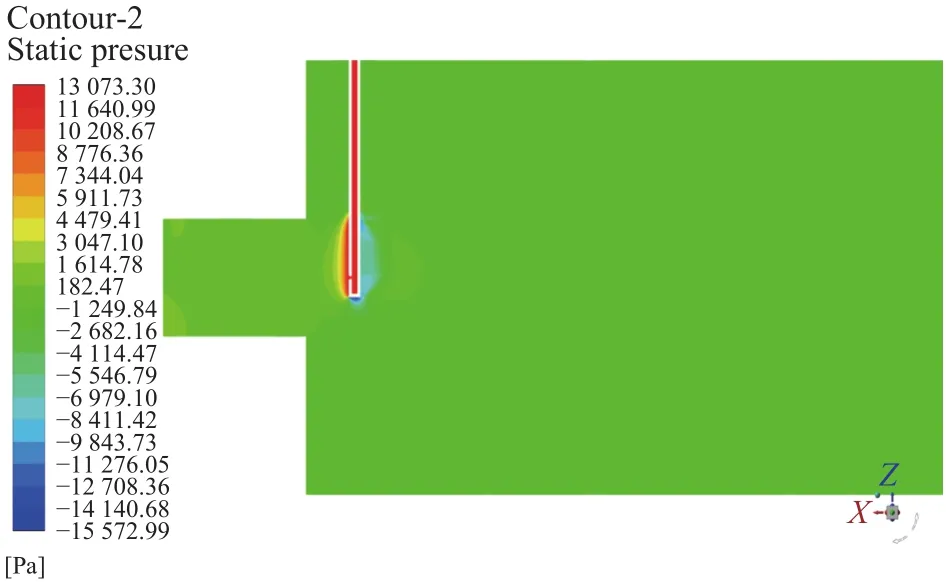
圖14 縱向截面靜壓云圖
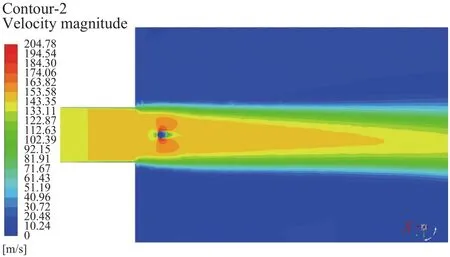
圖15 橫向截面速度云圖
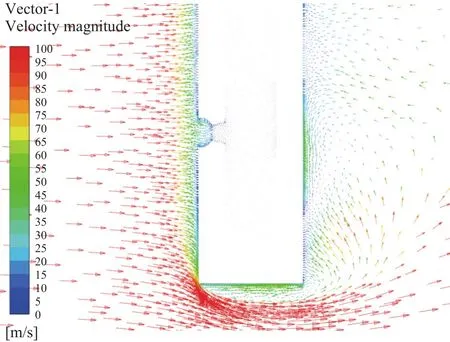
圖16 縱向截面速度矢量圖
由圖13、14、15可知,在總壓探針支桿正對來流部分,由于氣流受到滯止作用,使得支桿前面正對來流處速度降至約0,根據總壓定義,可以認為此處壓力升高至接近來流總壓;在圓柱支桿的過渡區,氣流速度增大壓力降低;在圓柱支桿后方,由于氣流受到支桿的阻擋產生絮流區,速度再次降低,壓力隨之升高;由于圓柱支桿的對稱結構,使得流場靜壓在壓力探針兩側對稱分布。
由圖16可知,由于總壓探針球面的收縮,對進入到圓柱支桿內的氣流產生滯止作用,使得氣流流經球窩面后速度快速降低;同時,由于球面的曲面作用,氣流在球窩面后形成一個渦,其中,渦內速度在5.0 m/s左右;渦后桿內速度再次減小,低于3.0 m/s。
在相同計算邊界條件下,對不同結構的總壓探針在氣流偏轉角15°情況下進行數值模擬計算,其仿真結果如圖17、圖18及表2所示。其中,圖17為五種不同結構總壓探針中截面速度云圖,由圖可知,不同方案總壓探針流場內的速度差異較為明顯。圖18為五種不同結構總壓探針球窩內部平均速度,結合圖18和表2,方案2與方案1數據對比可知,球窩型偏心小內徑結構相比標準結構,球窩內速度明顯減小,且其總壓系數亦明顯減小,表明偏心小內徑結構能夠有效減小氣流在球窩內的壓力損失,從而減小總壓系數。方案3與方案1數據對比可知,球窩型兩側削平結構相比標準結構,其總壓系數減少幅度約為10%,主要是由于球窩兩側削平雖減小氣流流經圓柱桿兩側的耗散損失,表明該損失不是影響總壓系數的主要因素。方案4與方案5數據對比可知,直孔型壓力探針總壓系數受直孔孔徑的影響非常大,且隨著孔徑的增大,總壓系數減小,在孔徑為4 mm時,其總壓系數為0.079%。
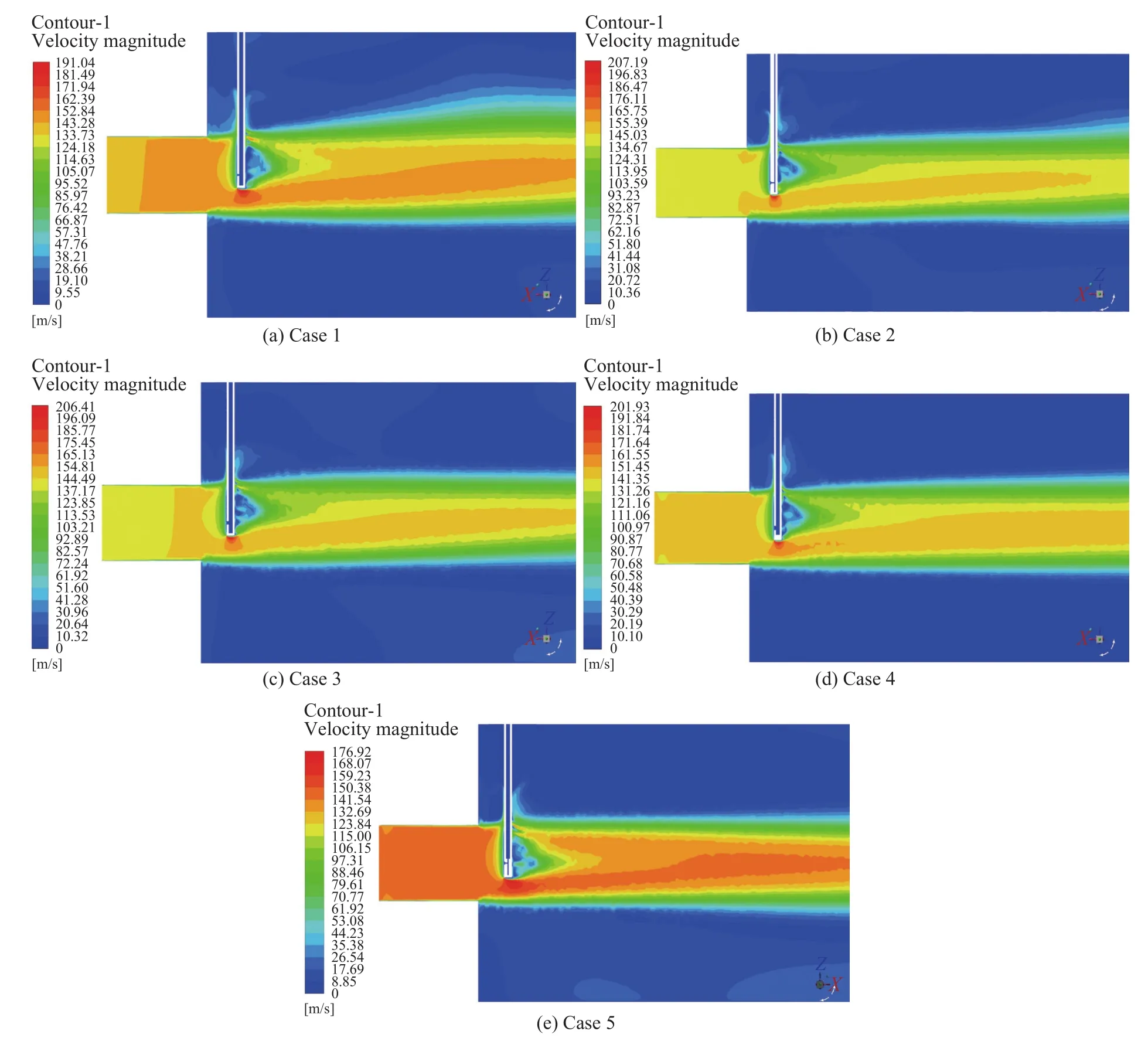
圖17 氣流偏轉角為15°時不同結構總壓探針的速度云圖
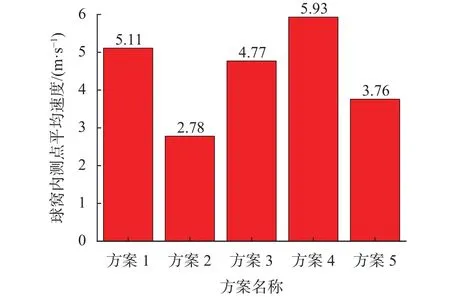
圖18 氣流偏轉角為15°時不同結構總壓探針球窩內平均速度對比圖

表2 不同氣流偏轉角下測試結果
綜上分析,球窩內平均速度可用來表征球窩型壓力探針總壓系數特性,且球窩內平均速度越小,球窩型壓力探針總壓系數越低,其總壓測量恢復特性越好。因此,本文中方案2球窩型偏心小內徑結構在氣流偏轉角15°下其總壓恢復特性最佳,且滿足工程應用中總壓系數小于0.1%的標準。
5 結束語
本文首先根據典型的總壓探針設計方法,設計出五種結構形式的總壓探針,并在亞聲速、常溫、常壓條件下對這五種典型的總壓探針進行數值仿真,通過仿真得到的壓力分布、速度分布等流場特性分析總壓探針的測壓特性,選出不敏感角及測壓準確度最優的總壓探針進行后續加工,進行實驗驗證。通過對球窩型標準結構、球窩型偏心小內徑結構、直孔型孔徑3 mm結構、直孔型孔徑4 mm結構、球窩型兩側削平結構五種不同的總壓探針在相同亞音速條件下進行數值模擬,分析其各自的流場特性,并計算出總壓系數。計算結果表明,氣流偏轉角對總壓的測量結果是有影響的,相對于正吹而言,有偏轉角的測點總壓偏低,總壓系數也相對大些,這與理論分析結果相同。經比較,氣流角度對球窩型偏心小內徑結構的影響相對較小,其他結構依次是直孔型孔徑4 mm結構球、球窩型兩側削平結構、球窩型標準結構、直孔型孔徑3 mm結構。因此,球窩型偏心小內徑結構的壓力探針受氣流偏轉角度的影響相對較小,測壓準確度較高,可以作為現場測試的最佳結構方案。
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50
