基于地面激光掃描的拱橋變形監控
2022-06-10 08:48:28張永民王京杭
廣東建材 2022年5期
劉 華 張永民 王京杭 王 晨
(中鐵橋隧技術有限公司)
0 引言
隨著城市地下交通建設發展,基坑開挖工程越來越普遍。基坑開挖不僅影響周邊市域交通的正常運營,還會導致地應力狀態重分布,引起土體變形[1]。這種土體非常態的現象可能危害臨近建筑結構基礎穩定性。拱橋橋臺與其基礎所受外力復雜,橋臺既承受上部結構和本身自重,又承受臺后土壓力及活載,然后再傳遞給基礎,地基土常承受不對稱壓力荷載。因此拱橋基礎土體出現質量問題將直接影響其橋臺沉降,進而造成橋梁整體的沉降,引發橋梁上部結構病害[2-3]。因此,基坑開挖過程中有必要實施對橋梁空間變形快速且精準的監控。
地面激光掃描技術利用設置于地面的激光掃描設備,獲取目標高精度點云數據。本項目利用該技術,首先建立不同施工工況下目標拱橋的點云模型,并通過特定的數據處理,實現對拱橋空間變形的及時監控。
1 地面激光掃描技術
1.1 地面激光掃描工作原理
地面激光掃描系統由激光掃描儀、掃描儀旋轉平臺、軟件處理平臺等其余附屬設備構成,是一種近年來新興的空間坐標數據獲取手段[4]。使用者可使地面激光掃描系統深入到大部分復雜的現場環境中,并實現各種類型和體量的物體三維數據完整的采集,從而快速建立由點云數據組成的實體。
地面三維激光掃描技術利用設立于地面的激光掃描儀向被測目標表面發射高強光束并接收,同時設備內部的測距系統計算出光束水平角、垂直角和目標點距離。這些參數反映了單個測點的空間三維坐標,這些三維坐標以海量點的形式分布于三維空間內即形成三維點云[5]。
1.2 點云數據簡介
點云數據即為包含被測目標表面各位置的空間三維坐標信息的高密度點集合。通常在被測目標為體量較大的構筑物時,視角的限制導致單站掃描儀無法囊括全部目標表面。此時需要檢測人員根據現場條件在目標周圍設置多個測站以實現被測目標表面全覆蓋。
多站源數據分別處于相互獨立的空間坐標系下,將多站源點云由離散集成為整體的過程稱為點云拼接[6]。拼接過程要求相鄰測站間具有一定比例的重合部分,或擁有足夠數量的公共特征物。根據重合部分或對應特征物實現單測站間的空間變換,最終完成多站源數據的坐標系統一。對于某個特定的構筑物,坐標系統一后的點云數據稱為該構筑物的點云模型。
2 拱橋數據采集與模型建立
2.1 工程概況
該橋梁具有較長時間的運營歷史。引橋雙曲拱橋位于主線橋端部,內側同T 梁橋相接,外側連接引道,各孔均為等截面懸鏈線無鉸拱,矢跨比1/4~1/5。該橋共四跨(34# 橋 墩~38# 橋 墩), 跨 徑 布 置 為 3 ×34.9m+32.3m,其中36#承臺有37 根樁,37#承臺有36根樁,樁基為鉆孔灌注樁,樁長約為23m,樁基所在位置土體主要為黏土和砂土。

圖1 雙曲拱立面圖
該雙曲拱橋西側進行的城市地下軌道交通建設,需要開展基坑開挖。隨著施工的進行,逐漸向深處開挖的基坑很可能會對雙曲拱引橋造成不利影響。基坑工程和堆土可能對雙曲拱引橋造成破壞,特別是臨近地鐵車站基坑的38 號墩處及其延伸出的高路基段。
2.2 數據采集
使用Leica 公司P50 型號三維激光掃描儀進行雙曲拱橋變形監控工作。該儀器的參數功能可實現對雙曲拱橋數據的完整采集。由于該橋梁為跨江橋引橋,屬于非涉水橋梁,因此只需根據橋梁監控需求并根據現場實際情況,在每跨范圍內設置若干測站,即可較容易地保證數據完整度。由于本測量工程整體跨度適中,因此可采用設置并獲取公共特征物輔助后續點云拼接過程,以提高點云模型的精確度。現場測點布置如圖2 所示,其中三角為測站位置所在。

圖2 測站位置示意圖
本文以基坑開挖前以及基坑開挖完成后兩個工況為研究對象,對雙曲拱橋實施空間變形監控。
2.3 拱橋模型建立
使用掃描儀配套點云前處理軟件進行點云拼接,實現拱橋點云模型的建立。將獨立的測站導入軟件中,選擇軟件中基于標靶的點云拼接功能,依次對相鄰測站數據進行坐標系統一,最終實現整體拱橋點云模型的建立。見圖3。
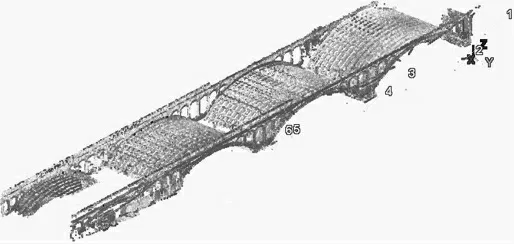
圖3 雙曲拱點云模型
3 基于點云的拱橋變形監控
3.1 坐標系統一
由于不同時間采集的不同工況下拱橋點云位于不同坐標系下,因此變形識別前需要使兩者坐標系統一。對于豎直坐標系,利用在兩次測量中都采集到的高程控制點的差值,對其中一個工況下的點云模型進行豎直方向的平移,同時以該高程控制點作為點云模型的坐標原點,實現豎直坐標系的統一。對于水平坐標系,這里選擇對齊兩個模型中橋梁側面同一位置測線的方法,即在橋梁點云側面相同高度位置,利用坐標值限制提取一段點云表面的直線。從俯視圖中觀察到該線段與平面坐標軸具有一定夾角,計算夾角度數同時對點云進行繞Z 軸的轉動,可以使得兩點云的水平坐標完成重合。統一后的坐標系如圖4 所示。

圖4 統一坐標系建立
3.2 測點選取與對比分析
該雙曲拱每跨橫向拱肋數量為16 個,選取每跨兩側的邊拱肋(1 號拱、3 號拱)與中間拱肋(2 號拱)作為變形監控的對象。對每一根拱,在橫橋向取其橫截面左下角的角點作為高程提取點。在縱橋向,除每跨兩側拱腳外,中間部分以一定間隔取測點,如圖5 所示。
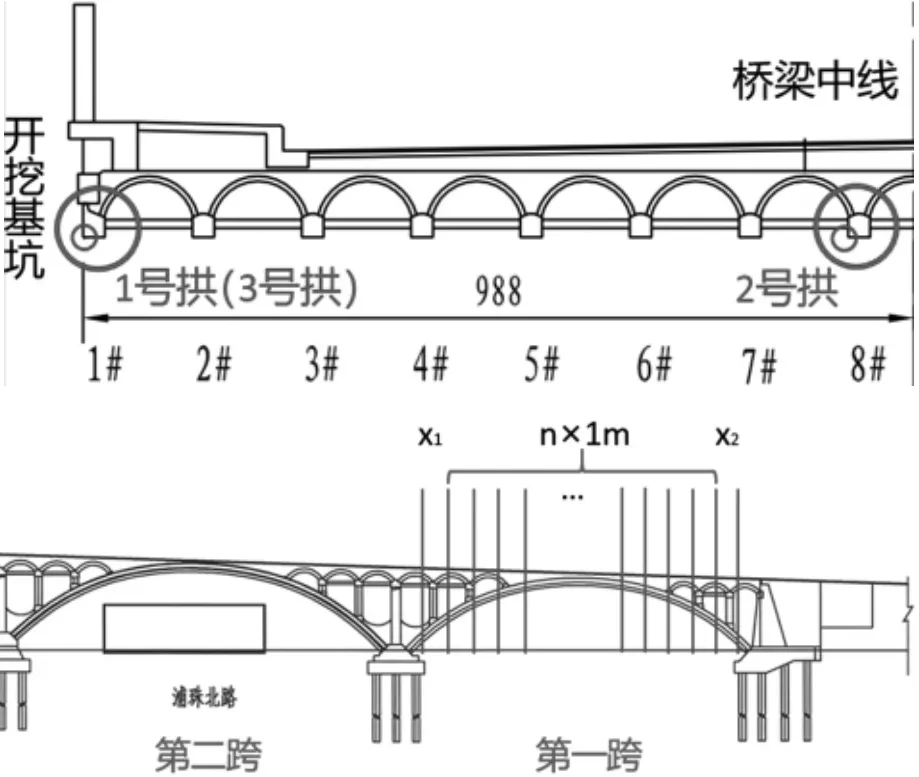
圖5 橫橋向與縱橋向測點選取
將測點縱橋向與高度坐標繪制成線型圖,如圖6 所示。
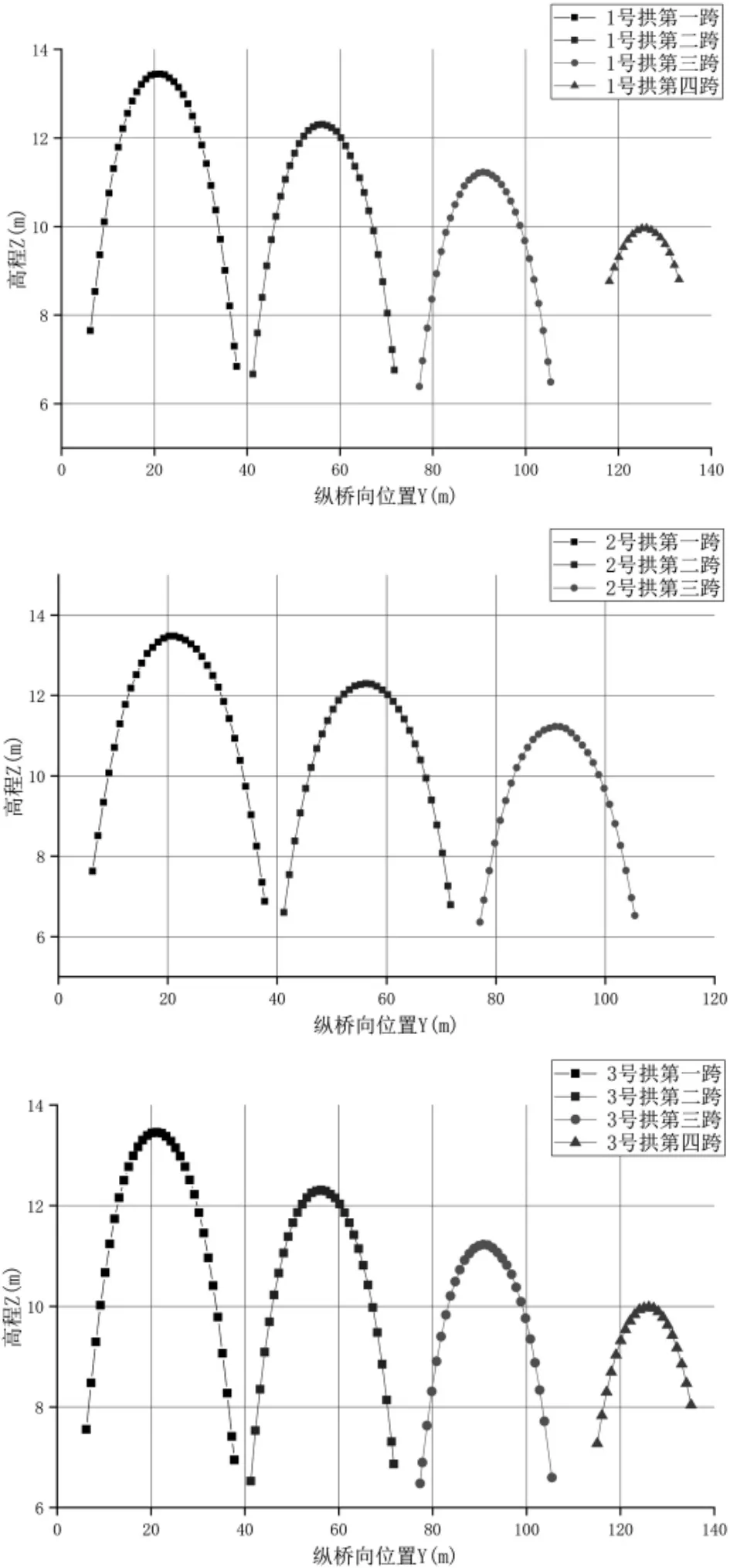
圖6 拱肋線型圖
圖6 中展現了各拱肋線型的平順程度。進一步分析兩個工況下對應測點的高程坐標,總體上基坑開挖后的高程結果較基坑開挖前的小,可以判斷基坑開挖對土體的影響在拱橋上得以體現,拱橋整體上產生向下的位移。具體來說,第四跨至第一跨的方向,各跨豎向變形差值出現逐漸增大的趨勢,其原因在于第一跨距離基坑最近,受到影響較大,而第四跨距離基坑最遠,受到影響較小。具體數值上,第一跨中最大豎向位移為25.2㎝,第二跨中最大豎向位移15.8㎝,第三跨與第四跨最大豎向位移都為0.7㎝。橋梁同一跨內,越靠近基坑側的拱肋,豎向位移也呈現增大的趨勢。經對比,該結果與有限元理論計算結果相差較小,證明了數據分析的合理性,同時監控結果表明在基坑開挖后雙曲拱橋仍處于較安全范圍內。
4 小結
本研究將地面三維激光掃描技術應用于雙曲拱橋的變形監控,實現了基坑開挖過程中拱橋空間變形識別,并得出以下結論:
⑴地面三維激光技術能夠高效地獲取橋梁點云數據,同時多個單站點云數據可以快速集成為代表橋梁表面位置信息的三維點云模型。
⑵基于橋梁三維點云模型,工程師可以以坐標為限制條件快速提取監控相關參數,通過不同基坑開挖工況下的參數對比分析揭示開挖施工對拱橋變形定性與定量的影響,實現對基坑開挖過程中關鍵時刻的拱橋變形監控。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
中華詩詞(2020年1期)2020-09-21 09:24:52
數學物理學報(2020年2期)2020-06-02 11:29:24
湖南教育·A版(2019年4期)2019-05-10 03:31:44
小學生學習指導(低年級)(2019年4期)2019-04-22 03:28:24
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
山東工業技術(2016年15期)2016-12-01 05:31:04