極區海冰影像自動監測系統的設計與試驗
2022-06-11 01:31:02常曉敏李文龍劉大雷劉文浩左廣宇竇銀科
極地研究 2022年2期
常曉敏 李文龍 劉大雷 劉文浩 左廣宇 竇銀科
(1 太原理工大學水利科學與工程學院,山西 太原 030024;2 太原理工大學電氣與動力工程學院,山西 太原 030024)
0 引言
隨著全球氣候變暖,北極冰蓋加速融化。海冰的融化使得極區航道的開通成為了可能,北極油氣資源豐富,北極航道的開通對中國海運存在巨大的潛在價值[1-2],而海冰的存在是影響船舶在極區航行安全的主要因素[3-6]。船舶在冰區航行時,海冰與船舶之間的相互作用是一個復雜的動力過程[7-11],所以海冰冰情的監測對船舶航行有重要的意義[12]。
中國在北極考察時已經在北冰洋中心區布放了海冰物質平衡浮標(IMB)海冰物質平衡陣列浮標(SIMB 浮標)氣象站上層海洋觀測系統等超過20 枚,這些浮標經過長期的觀測,已經獲得了大量的氣象數據,并且部分數據已經得到了實際應用[13-15]。但浮標所采集的數據量有限且比較單一。目前對北極航道的冰情變化的研究較少,雖然衛星遙感飛機航拍等技術已成為目前大尺度海冰監測的主要手段,但是這些方法存在采集圖像的分辨率不高監測周期過長以及受氣候變化限制等問題[16-17]。在北極海冰快速變化下,自動觀測浮標的有效運行時間相應下降,但是對浮標運行形態的圖像監測技術鮮有報道,浮標可能會因海冰的破碎融化冰雪的覆蓋以及野生動物的破壞導致傳感器獲取的數據不正常。針對北極海冰的影像監測存在較大挑戰。國外研究人員曾在北冰洋高緯度海區布放了SIMBA 浮標和Webcam系統,首次觀測到海冰融池的演化與假冰底的形成過程,Webcam 獲取了部分海冰表面形態變化的圖像[18]。我國歷次北極科學考察中在長期短期冰站開展海冰現場觀測工作,涉及多種海冰形態,但是尚未實現對海冰表面形態的可視化監測[19-22]。在國家重點研發計劃支持下所設計并布放的北極氣-冰-海無人觀測站(無人冰站)可實現大氣海冰海洋的多參數同步觀測,但是針對其運行狀態的可視化監測尚未開展,僅從原始數據判斷無人冰站的運行狀態,往往會造成誤判,影響數據的后續使用,例如傳感器表面覆蓋冰雪導致數據失真或標體傾斜使傳感器浸入水中。因此,研發海冰影像自動監測系統具有重要意義。
針對以上問題,本文提出了極區海冰影像自動監測系統,該系統能夠適應極區惡劣的環境,并且能夠實現對海冰形態與浮標運行狀態的長期自動實時監測。極區海冰影像自動監測系統使用的主控制器是MSP430 微控制器,集成了獨立外設的時鐘芯片系統狀態監視模塊1-wire數字溫度傳感器及串口攝像頭等,實現了長期低溫下北極海冰圖像的采集,設計了基于銥星的通訊模塊,實現了將圖像數據等經銥星傳輸到國內監控平臺的過程。整個系統由太陽能發電板在有光照時利用光能供電,蓄電池儲存多余電能在無光時供電。北極現場試驗結果表明系統工作穩定,可在北極極端環境下正常運行,圖像采集及大數據量遠程傳輸性能可靠,可以實現海冰形態與浮標運行狀態的自動可視化監測。
1 極區海冰影像自動監測系統的總體設計
極區海冰影像自動監測系統的整體結構如圖1所示,系統包括電池供電模塊圖像數據采集模塊數據傳輸模塊以及溫度控制模塊。太陽能發電板提供整個系統所需的電能,多余的電能儲存至蓄電池以備用。該供電模式考慮了極區極晝和極夜的極端環境,對蓄電池與太陽能板進行抗低溫處理,可以實現極區低溫環境下化學能的大量儲存。圖像數據采集模塊主要采用串口攝像頭,使用串口指令模式控制攝像頭采集圖像并將圖像數據傳送至控制器,以時間命名的方式將圖像保存在 TF 卡中[23]。DS18B20 溫度傳感器和電熱絲為溫度控制模塊,電熱絲在串口攝像頭溫度不夠時進行加熱使其達到能夠清晰采集圖像的溫度。數據傳輸是通過銥星9523 模塊實現的,系統采集到數據后通過銥星9523 將數據發送給衛星,然后衛星將數據中轉至指定的IP 地址或者郵箱[24-26]。整個系統在沒有指令時為低功耗狀態,在接收到中斷喚醒時重新供電進入工作狀態。
2 系統硬件設計
2.1 主控制器
監測系統所選用的微控制器為MSP430F5438A。MSP430 系列嵌入式微控制器有多種低功耗模式,正常待機時耗電流低至 0.8 μA,工作溫度為-40~85 ℃,滿足極區環境溫度要求。MSP430 F5438A 微控制器在關閉模式LPM4(RAM 數據保持,可快速喚醒)時電流為1.69 μA,并且在關閉模式LPM4.5 下電流僅為0.1 μA[27-29],可以降低系統在極區工作時的功耗。可以外接8 MHz 和32.768 kHz 晶振,芯片經內部鎖相環電路倍頻后最高主頻可達24 MHz。MSP430F5438A 具有豐富I/O 接口和串口資源,4 路串行通信接口8 路串行外設(SPI)接口和4 個內部集成電路(I2C)總線,可以掛載大量傳感器。本系統在以單片機為核心控制器的基礎上外圍擴展了溫度傳感器串口攝像頭通訊模塊等外設。控制板結構圖如圖2所示。

圖2 系統硬件電路結構Fig.2.System hardware structure
2.2 銥星9523 數據傳輸模塊
銥星系統的極地軌道可以實現南北極遠程實時通信功能[30]。銥星9523 性能穩定可靠,通過銥星天線將數據傳輸到國內。銥星模塊外圍電路如圖3所示。
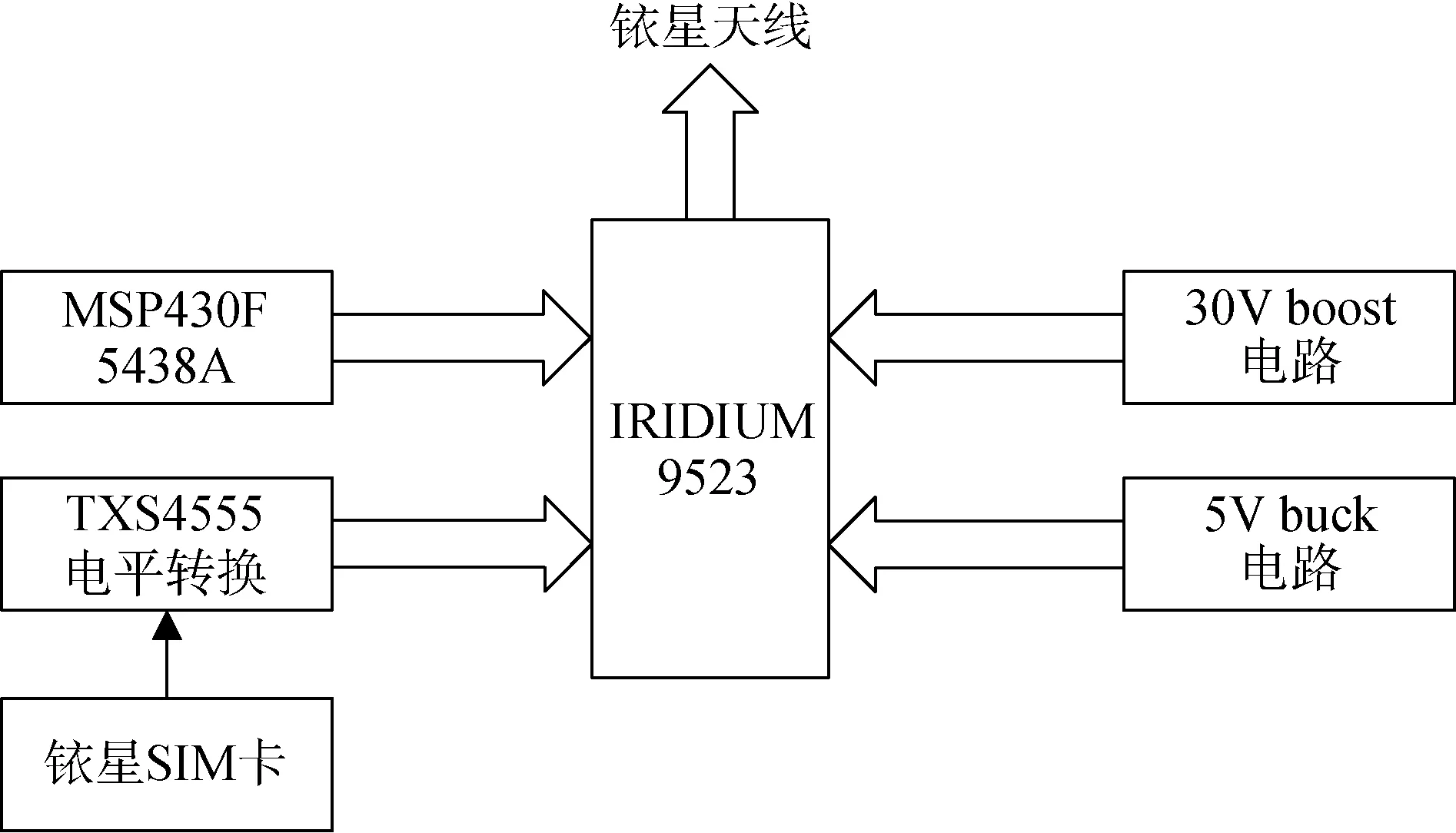
圖3 銥星模塊外圍電路圖Fig.3.Iridium module peripheral circuit diagram
提供的與微控制器的接口為9 線TTL 電平串口通信,通過電路設計使其轉換為3 線串口通信,直接與微控制器串口相連。微控制器與銥星模塊進行數據傳輸傳輸模式選擇信號查詢等信息交流是通過AT 指令來實現的。銥星SIM 卡與銥星9523 連接需要通過TXS4555 電平轉換來實現。系統供電電源為12 V,為滿足銥星9523 通訊模塊需要5 V 和30 V 電源供電的要求,選用了LM2596-5.0 和CS5173 進行DC-DC 電壓變化分別產生5 V 和30 V 電壓。海冰圖像數據與浮標運行狀態圖像通過銥星 9523 數據撥號(Dial-up data service)業務實現[31]。銥星數據撥號具有實時性高速率全雙工連續傳輸以及數據量大等特點。
2.3 輔助電路設計
SD2200 是實時時鐘芯片。內置時鐘調整功能,精度高誤差小;低功耗,在溫度25℃電壓為3.0 V 時典型電流值為0.25 μA;內置電池壽命較長且工作溫度范圍較廣,可在極區環境下長期穩定工作。系統使用該芯片的分鐘邊沿中斷功能。實時時鐘電路如圖4所示。
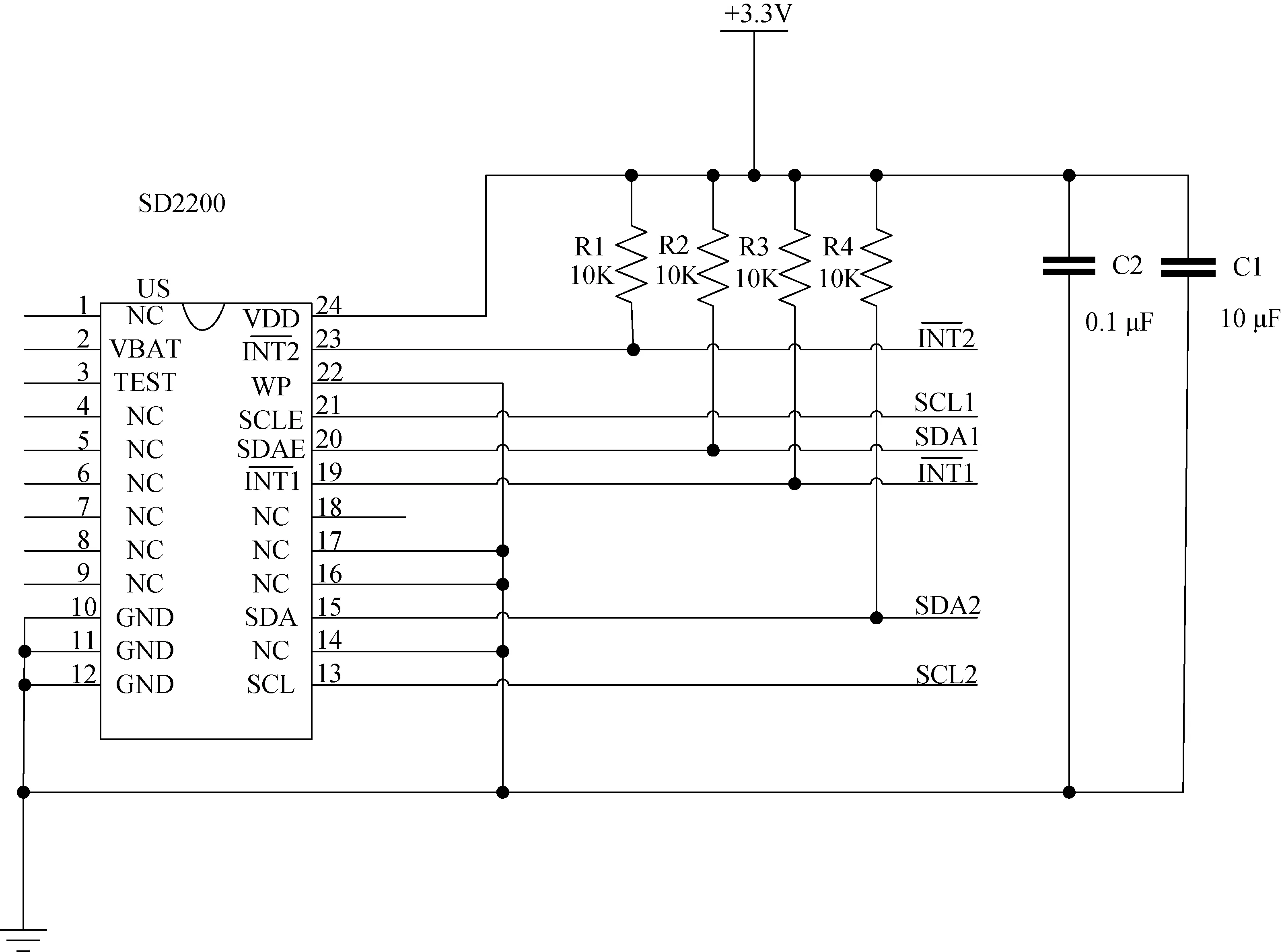
圖4 實時時鐘電路圖Fig.4.Real-time clock circuit diagram
SP706 是一種復位監控芯片,功耗低可靠性高,符合系統硬件選型要求。可在系統運行出現故障時強制對單片機進行硬件復位,避免程序進入停滯狀態。SP706 應用電路圖如圖5所示。
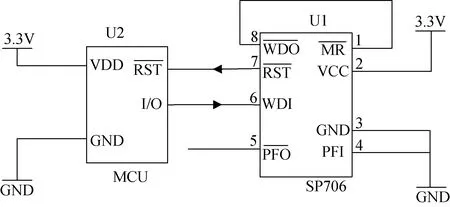
圖5 SP706 應用電路圖Fig.5.Application circuit diagram of SP706
2.4 各類傳感器選型
海冰影像自動監測系統運行地點在極區,現場環境復雜惡劣,在長期運行過程中容易受到極夜低溫風雪等氣候條件的影響,所以在傳感器的選擇中需要考慮到以下幾個方面。
1.耐低溫:極區環境溫度一般不超過 0 ℃,所以在選擇傳感器時要選擇耐低溫至少-40℃的傳感器。
2.低功耗:極區電能稀缺,并且在低溫條件下電池的放電性能和電池容量都會受到影響,因此需要選擇低功耗的傳感器,實現系統長期監測。
3.性能穩定:海冰影像自動監測系統將會在無人值守的極區環境中運行,系統一旦出現問題,將會無法維修,所以選擇的傳感器應該性能穩定可靠,確保不出問題,實現長時間的現場監測。
DS18B20 是一種數字溫度傳感器。測溫范圍為-55~125 ℃,測量精度高,能在低溫環境中精準測出攝像頭的溫度;工作電壓為3~5.5 V 且待機電流僅為0.75 μA,所需功耗低;體積小抗干擾能力強等特點使其能夠長期穩定地工作運行。
系統選擇的串口攝像頭帶有紅外照明功能,少光或無光時可實現自動照度補充完成圖像采集。同時其采用的芯片和器件,在保證性能的同時兼顧低功耗,完全滿足了極區低溫惡劣環境的需要。
3 系統軟件設計
3.1 圖像采集程序設計
圖像采集程序主要實現的是中斷喚醒及圖像采集策略串口攝像頭溫度控制策略數據傳輸策略。
程序有以下流程:(1)系統開始后進入休眠狀態;(2)時鐘模塊SD2200 的分鐘中斷發出喚醒信號,使其系統進入工作狀態;(3)讀取系統時間并判斷是否達到拍照時間;(4)溫度傳感器以及加熱絲保持串口攝像頭溫度在拍照范圍內然后進行圖像的采集;(5)銥星信號大于3 時發送數據包。程序流程圖如圖6所示。
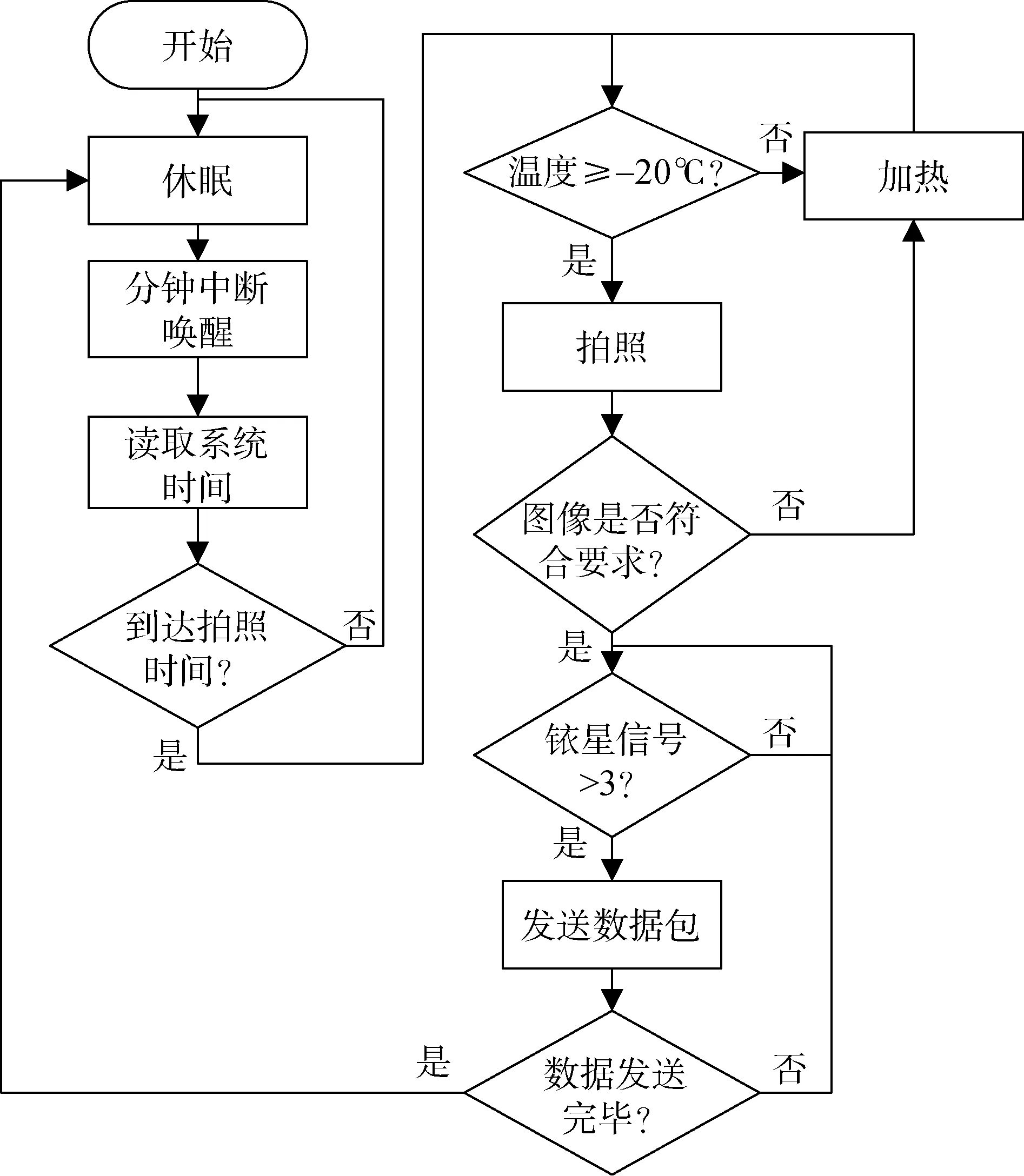
圖6 圖像采集流程圖Fig.6.Flow chart of main program
串口攝像頭能夠采集清晰圖像的溫度要求是不低于-20 ℃,首先判斷攝像頭溫度是否達到要求,如果溫度沒有達到,就利用電熱絲對其進行加熱。在溫度達到要求時進行拍照然后判斷圖像是否符合要求,不符合即進行二次加熱,最后通過銥星傳輸模塊將數據發給衛星。圖像拍攝由攝像頭完成,可以通過遠程控制指令靈活地選擇所需的圖片分辨率。圖像格式默認為JPEG,可擴展為BMPTIFPNG 等其他格式,圖片像素也有多種可選。IRIDIUM9523 模塊的SBD 功能,一次可以發送的最大數據包為1920 Byte,不能一次性完成圖像的傳輸。而IRIDIUM9523 的數據撥號傳輸的數據量不受限制,可以一次性傳輸完成。根據傳輸數據量的大小靈活選擇使用SBD 或數據撥號。
3.2 數據傳輸策略
極區海冰自動監測系統需要安裝在無人值守的極區,安裝后無法維護以及更新程序,因此編寫了遠程數據傳輸控制程序。海冰自動監測系統的遠程控制流程圖如圖7所示。遠程控制指令的數據包有兩種傳輸方式,分別為郵箱傳輸和直接IP 傳輸。把需要發送的數據打包好之后,通過郵箱或IP 發送至銥星服務器,并且指定發送到的終端銥星號,當IRIDIUM9523 終端進行數據讀取時,服務器自動把數據發送給終端,并產生成功標志,確保數據不會丟失。當向同一個銥星模塊發送多條數據包時,模塊只能一一讀取,此時的數據包就在銥星的網關進行排隊等待讀取,IRIDIUM9523終端通過SBD 的讀取方式一次讀取一條數據包后,銥星網關中的排隊數量就減少一個,每次讀取都優先讀取排隊的序號靠前的數據包,讀到數據包后進行數據分析,每讀完一個數據包就執行相應的指令。
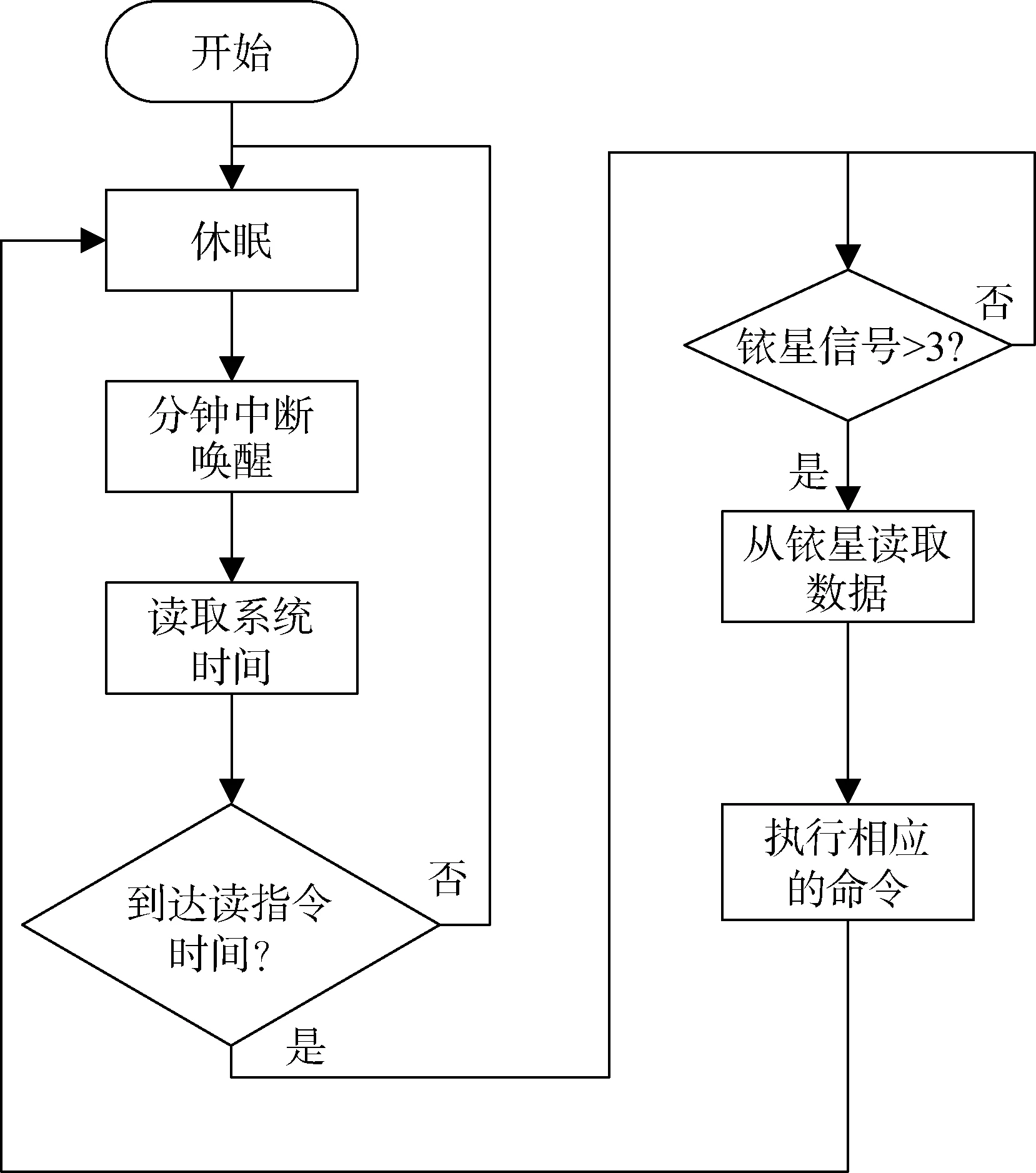
圖7 遠程控制流程圖Fig.7.Flow chart of remote control
遠程指令控制表指令較多,并可根據實際需要靈活增加。表1 所列僅為其中幾條,并對這幾條的具體功能等加以詳細介紹。如接收到指令No.0 和 No.1 后,立即讀取系統電壓溫度數據等程序,完成圖像的采集并傳回。指令No.2 為設置系統圖像采集時間,到達系統設置的時間就進行拍照。指令No.3 為設置系統拍照時間間隔,如需要每隔1 天,拍一張照,此處就設置為1。指令No.4 為設置讀取每兩條控制指令之間的時間。指令No.5 是為了防止溫度傳感器無法正常獲取溫度而不能控制好溫度,此處就設置了強制加熱時間,不再使用溫度反饋的閉環控制。

表1 指令信息Table 1.Instruction information
4 北極現場應用
4.1 中國第九次北極科學考察中的應用分析
2018年8月19日,北極無人冰站在長期冰站開始布放,并按照考察計劃在北冰洋中心區開展現場觀測。初始布放位置為 84.09686°N,167.13394°W,布放后所有觀測系統控制系統和通訊模塊均能正常工作,現場采集了大量觀測數據。北極無人冰站銥星通訊上下行數據均通過郵件傳送,數據傳輸的頻率為1 次/小時。北極無人冰站系統已成功傳輸超過12 個月的有效觀測數據回到國內。海冰影像監測系統布放于無人冰站附近,用于檢驗低溫攝像頭銥星傳輸模塊主控制器等的適用性,搭載的攝像頭所獲取的圖像分辨率可通過遠程指令進行調整,典型值為320×240。目前所有圖像數據均通過自主研發的海冰影像監測平臺獲取和存儲,可對外提供圖像數據,后續研發數據庫并逐漸實現全部數據的開放與共享。海冰影像自動監測系統與無人冰站一起布放在同一海冰上,實現對海冰形態與設備運行狀態的實時圖像監測。海冰影像自動監測系統拍攝到第九次北極科學考察中北極無人冰站布放時的作業情況,如圖8所示。
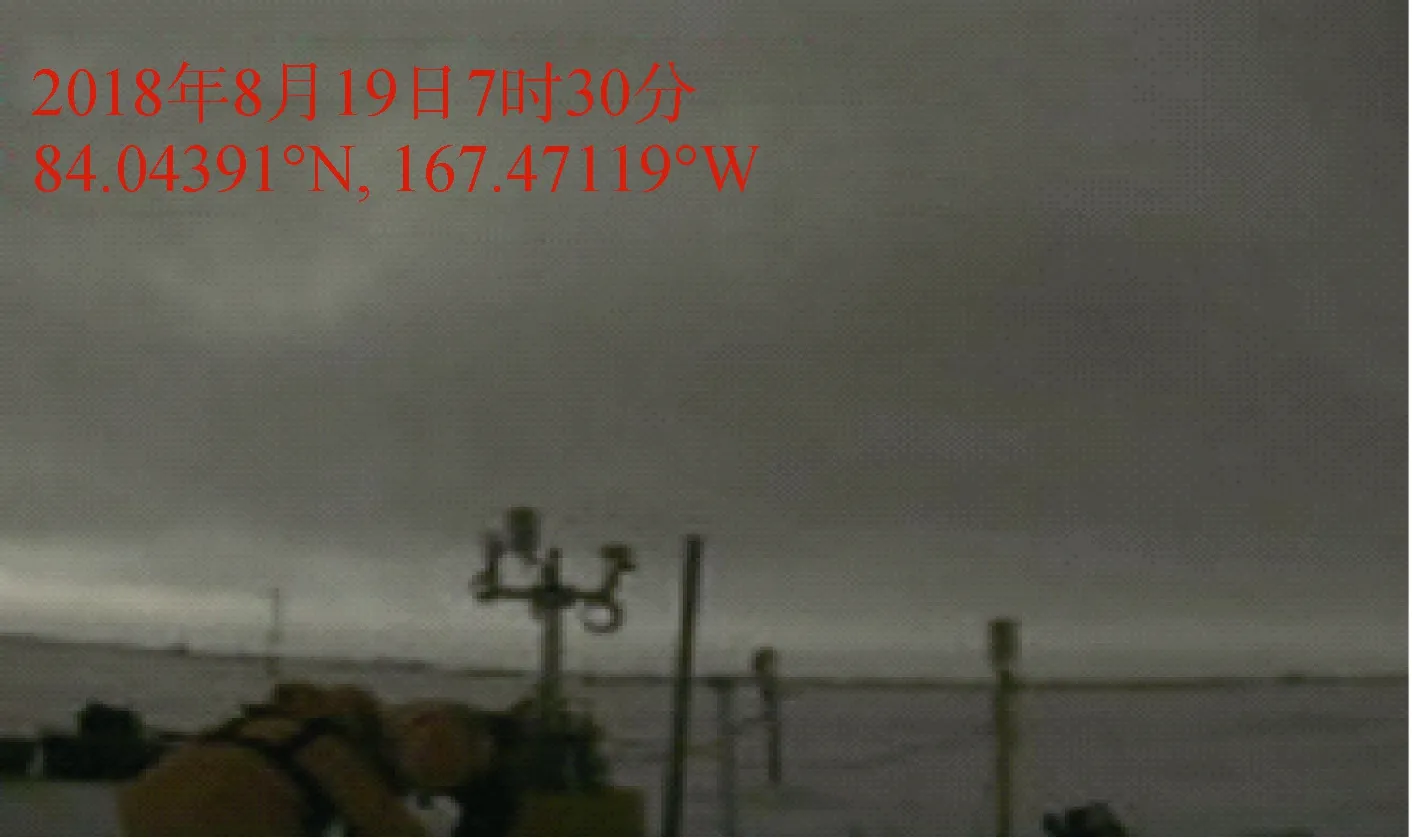
圖8 第九次北極科學考察中無人冰站布放時的作業情況Fig.8.Photo of deployment of unmanned ice station in the ninth CHINARE
北極無人冰站布放后正常工作,海冰影像自動監測系統在2018年8月21日7 時與21 時獲取無人冰站運行狀態,分別如圖9 和圖10所示。

圖9 第九次北極科學考察中無人冰站在2018年8月21日7 時的運行狀態Fig.9.Photo of unmanned ice station at 7:00 on August 21,2018 in the ninth CHINARE

圖10 第九次北極科學考察中無人冰站在2018年8月21日21 時的運行狀態Fig.10.Photo of unmanned ice station at 21:00 on August 21,2018 in the ninth CHINARE
從圖9 可以看出,2018年8月21日7 時,無人冰站運行狀態正常,該時刻天氣較陰,光照強度較弱,冰面尚未出現融池等現象;從圖10 可以看出,該時刻天氣較好,可觀察到明顯太陽光照射。結果表明海冰影像自動監測系統可以提供海冰及設備運行狀態的實時信息,實時信息包括浮標周圍的海冰是否有破碎,隆起以及融池等現象,浮標是否發生姿態的變化,所搭載的溫濕度大氣壓積雪傳感器溫度鏈銥星GPS 等傳感器是否被冰雪覆蓋。
4.2 中國第十一次北極科學考察中的應用分析
在中國第十一次北極考察[32]中,布放了一套無人冰站觀測系統,該系統基于之前中國第九次北極科學考察中海冰影像自動監測系統的應用經驗進行了優化與改進,包括圖像的分辨率傳輸間隔時間,也進行了攝像頭的優化升級,優化了加熱模塊,提高了攝像頭的抗霧性能,并對攝像頭云臺進行了結構優化,能夠進行 360°全方位的監測,更好地完成海冰形態等參數的觀測,有效評估無人冰站的運行狀態。在第十一次北極考察長期冰站的無人冰站布放位置旁布放了一套海冰影像自動監測系統,如圖 11a所示。截止2020年11月,無人冰站與海冰影像自動監測系統工作正常,按照程序設定向國內傳輸無人冰站所在海冰及其狀態的照片。圖11b所示為2020年8月31日海冰影像自動監測系統所獲取的圖像信息,在該圖片上可以較為清晰地觀察到雪地上新增的北極熊腳印,表明在前一日該海冰上出現北極熊,且無人冰站系統并未受損,冰上也尚未出現融池現象,因此無人冰站的觀測工作也將順利進行。
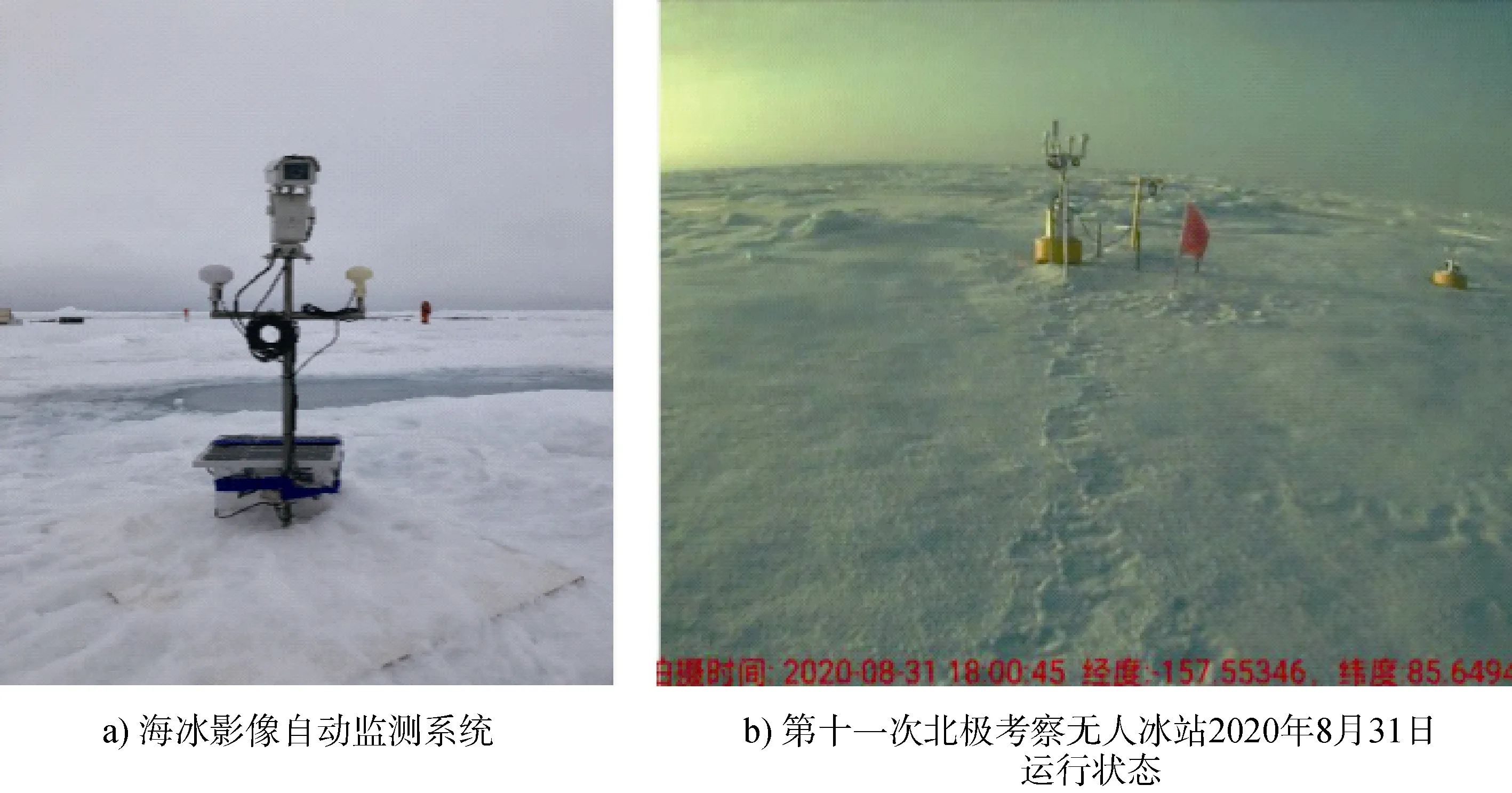
圖11 海冰影像自動監測系統和無人冰站圖像Fig.11.The automatic sea ice image monitoring system and photo of the unmanned ice station
5 結論
1.極區海冰影像自動監測系統能夠通過獲取圖像數據實現對海冰冰情以及浮標運行狀態的長期連續監測。帶有加熱絲的串口攝像頭能夠在低溫環境下正常采集圖像,并且具有低功耗工作穩定可靠等特點,滿足極區惡劣環境下工作的需求,為觀測海冰生長和消融過程及其對冰基浮標運行狀態的影響提供直觀數據支撐。
2.大數據量圖像遠程傳輸技術是極區海冰影像自動監測系統設計的關鍵技術。基于銥星9523 數據傳輸模塊,開發了外圍電路以及相應的圖像采集程序與數據傳輸策略,并在中國第九次北極科學考察與第十一次北極科學考察中得到應用,能夠實現極地圖像數據的傳輸,解決了極地地區圖像數據傳輸的問題。系統具有遠程數據傳輸的功能,也可在極區冰川苔原等冰雪環境監測中發揮作用,例如對于冰川也可以起到一定的監測作用[33]。
3.極區海冰影像自動監測系統使極地設備運行狀態以及海冰監測實現可視化,能夠為今后船舶的航行以及科研工作提供寶貴的圖像數據,保證船舶航行的安全并且可以更方便地發現問題解決問題。當海冰發生融化后,通過浮標運行狀態的可視化監測,可以人工關斷某些科學載荷的數據傳輸,保證其余傳感器持續工作,繼續獲取科學數據,節省數據傳輸的通信費用,增加海冰浮標的工作壽命,對研究海冰的生長和消融有重大的意義。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
海洋通報(2021年3期)2021-08-14 02:20:38
成都信息工程大學學報(2021年2期)2021-07-22 07:23:32
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
電子技術與軟件工程(2016年24期)2017-02-23 19:13:41
中國學術期刊文摘(2016年8期)2016-02-13 13:04:44