物料搬運機械手機構運動學分析及仿真
2022-06-13 08:47:08王吉平
內燃機與配件 2022年7期
關鍵詞:分析
0 引言
隨著科技的發達,如今的21世紀已進入了智能化、自動化的時代,人工也滿足不了要求更高、更危險的崗位,也因此發明創造出機械手來代替人工。隨著機械手技術的逐漸成熟,而物料的搬運與管理又是企業生產中的關鍵一環,越來越多的企業優先考慮使用機械手設備,因此機械手在物料移動、運輸領域越來越流行。
本文通過建立D-H坐標,分析機械手機構的運動學正、逆正問題,為仿真分析提供理論基礎;并使用建模軟件對機械手進行三維建模,并借助軟件進行運動仿真,得到各構件的位移、速度和加速度曲線圖,通過分析曲線圖驗證構件設計的合理性,可為機構進一步的優化提供基礎。結合運動學分析就能分析出該產品如果在投入使用的時候真實的工作狀態和受力情況,對不好的地方進行改進,不斷地完善產品性能,最終達到使用要求和性能以及經濟性的要求。
1 物料搬運機械手結構
機械手的組成大致主要分為3個部分:執行元件,控制元件,驅動元件。執行元件主要包括手指、手部和軀體;機械手的控制系統相當于人類大腦的“中樞神經”;一般的驅動形式主要包括機械、電力、液壓及氣壓4種形式。
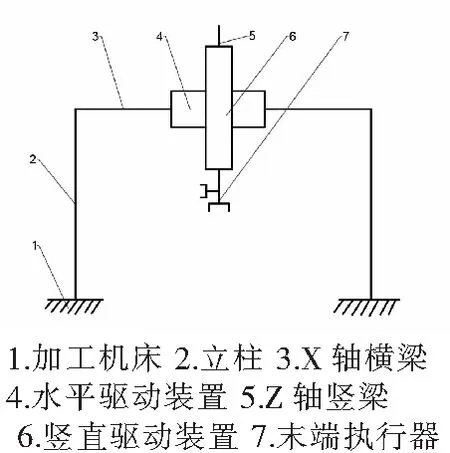
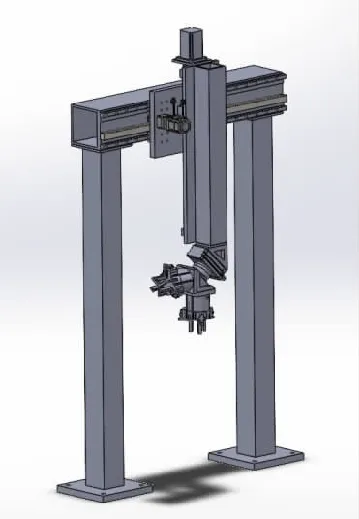
本文研究的搬運機械手具備某零件在機械加工過程中物料的抓取、送料至卡盤先抓取已加工物料再進行新物料的裝夾、將已加工物料送回的功能。機械手結構簡圖如圖1所示,共有三個自由度,X、Z軸方向的移動和一個轉動。整個機械手通過PLC控制,X軸和Z軸選用的是電力傳動,使用伺服電機驅動零部件運動,而末端執行器則通過一個擺動氣缸實現旋轉,并且能旋轉180°。為了實現上下料工作能在同一個行程內進行,本文選用機械手的末端執行器有兩個手爪,一個夾取待加工零件,另一個夾取已加工零件。
按照每月練兵成績,對照考核細則,對當月練兵成績優秀的隊員進行獎勵,并對成績不達標的隊員進行懲罰,考核結果兌現在當月工資中。同時,全年的考核情況也為年底評先選優的重要依據,練兵中出現不合格情況的隊員,不在崗位標準作業流程先進個人評選范圍。
2 運動學分析
從機器人運動學方面分析,大部分都是去探究機械手的各種運動,以及去探討各個坐標系相互間的關聯,但是要忽略掉導致運動的力和力矩。機器人的空間位移表達式應用時間的函數來表示,能展現出關節與關節之間及末端執行器之間的位姿情況。運動學研究的是機械手各個連桿坐標系之間的位置關系,運動學問題又分為正運動學和逆運動學,解出正、逆問題的解可為后續仿真分析提供理論基礎。
2.1 齊次坐標及坐標變換
齊次坐標及坐標變換適用于機器人的機構描述與運動學分析。齊次坐標就是用N個數去描述N維坐標的一種方式。四個不同時為0的任意數稱為三維空間的點的齊次坐標。而齊次坐標變換就是把經過平移或旋轉后的坐標矢量變換為參考坐標系所描述的矢量。
根據機械手的實際情況設定各部件運動參數(位移、時間),以下函數按照構件在多少時間內運動到什么距離編寫的,即:
2.2 D-H坐系標建立
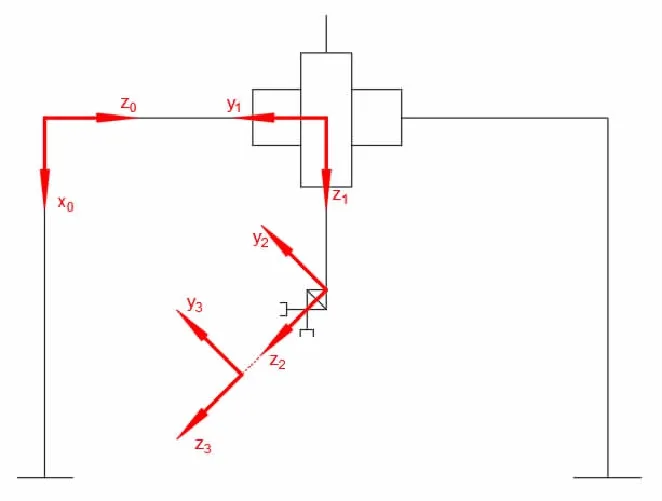
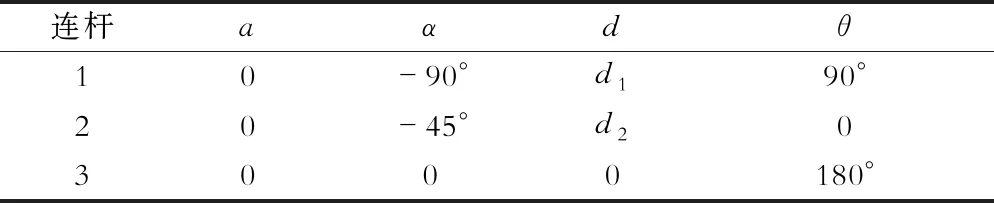
在機器人研究中,最常見的連桿坐標系建立的方法是D-H法。D-H坐標系主要內容為:先建立參考坐標系,再根據前一個關節建立自身的坐標系,以此類推,建立末端執行器的坐標系,再通過相鄰坐標系之間的變換可推出末端執行器與機架之間的變換,進而寫出運動學方程,可對其進行求解。按照坐標系確定規則,可建立本文研究的機械手的D-H坐標系,如圖2所示。
景德鎮永宣年間青花纏枝紋飾種類繁多,如叫作“忍冬”的金銀花,屬于佛教裝飾題材。而象征著“出淤泥而不染”的荷花題材,是這個時期景德鎮青花瓷使用率最頻繁的裝飾紋樣。牡丹紋象征著富貴,而葫蘆、葡萄、石榴等象征的是多子多福。
三維倉庫仿真場景的建立能夠全方位、更直觀地提供倉庫內的各種信息,并可以實現倉庫漫游,感受與真實倉庫相似的體驗。三維倉庫仿真場景可以實現多層次,區域切換,任意漫游,放大縮小旋轉等立體三維方式查看和瀏覽倉庫信息,并能快速定位問題的原因和位置。
以CCT為指標繪制倒漏斗圖,詳見圖8。由圖8可知,各研究散點均分布在倒漏斗圖范圍內,對稱性較好,提示本研究存在發表偏倚的可能性較低,結論較可靠。
“目前物流行業的并購分為兩種,一種是企業之間的合并,一種是企業內部的整合。”張志強稱,58速運和GOGOVAN合并,中國外運收購招商局物流集團,萬科入主普洛斯物流地產,都屬于前者;而上海遠成物流和遠成快運的合并,則屬于企業內部的資源整合。
2.3 運動學正問題
通過相鄰坐標系之間的變換可推出末端執行器與機架之間的變換,且運動學正問題的解是唯一的。
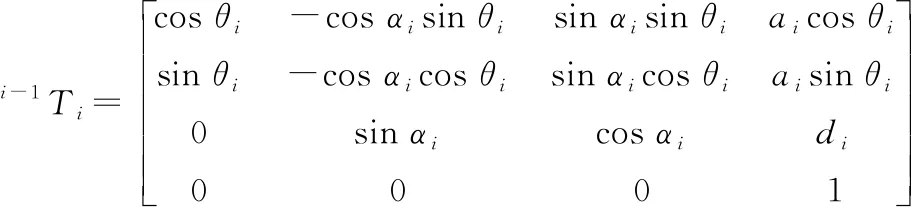
將表1中的數據分別代入下面表示相鄰的兩連桿坐標系變化的表達式中,則可計算出上述機械手相鄰連桿坐標系變換的矩陣。
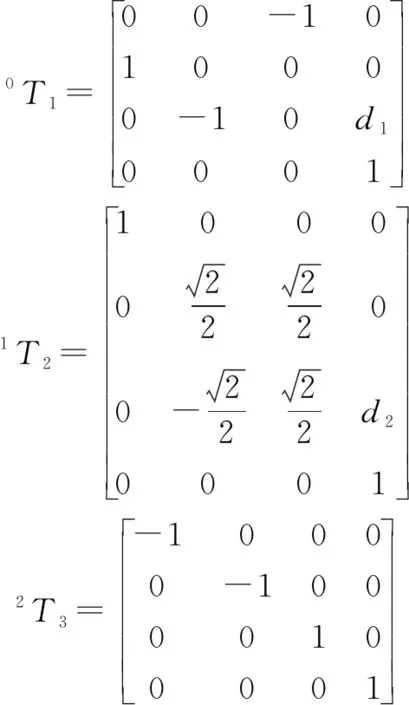
各坐標系之間的變換矩陣如下:
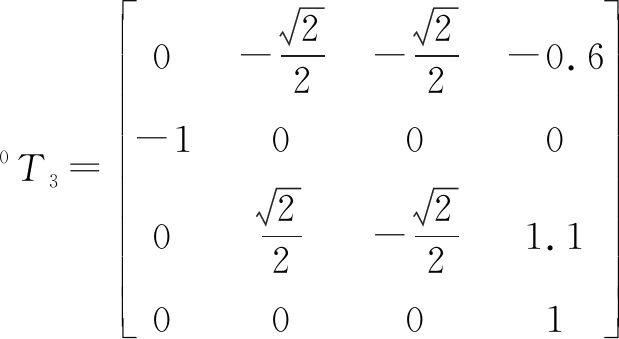
并為本文的機械手設定一個運動過程:
以上正解就是機械手的末端執行器相對于參考坐標系的位姿情況。
2.4 運動學逆問題
與正運動學不同的是,逆運動學問題則是依照已知末端執行器的位姿來確定機器人的關節變量。而且,逆運動學的解不像正運動學的解是唯一的,它可能有解,也有可能無解,即使有解也可能不是唯一的。所以解逆運動學問題,一般是得到閉式解。
c)豎梁:step(time,2,0,4,550)+step(time,12,0,14,-550)+step(time,17,0,18,300)+step(time,22,0,23,-300)+step(time,26,0,28,550)+step(time,36,0,38,-550);
其中
=sin
,
=sin
,
=sin
,
=cos
,
=cos
,,
=cos
。根據方程組,求出
、
、
的值即為逆解。由以上可知,方程組有無數個解,其中一組解為
=90°,
=0,
=180°,滿足正解。
3 Adams運動仿真分析
3.1 運動學仿真結果分析
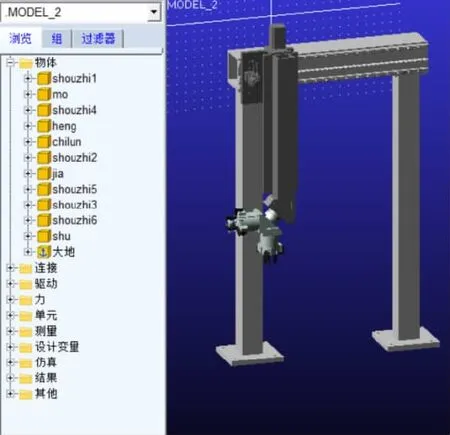
使用Solidworks軟件對機械手完成三維建模,并將三維圖導入Adams中進行運動仿真分析,如圖3、4所示。在模型中的連接處添加約束:機架與地面之間添加固定副;齒輪與橫梁掛板之間添加轉動副;橫梁掛板與機架之間添加移動副;豎梁與橫梁掛板之間添加圓柱副;末端執行器與豎梁之間添加轉動副;6個手指與末端執行器之間添加移動副。
θ-關節角:關節相鄰兩公垂線在法線平面上的投影夾角。d -連桿偏置量:相鄰兩公垂線沿關節軸之間的距離。 a-連桿長度:兩關節軸之間的公垂線距離。α -連桿扭轉角:相鄰關節軸在X平面的夾角。表中
=1100mm,
=600mm,
=180°。
b)齒輪:step(time,5,0,8,1200d)+step(time,29,0,32,-1200d);
老板娘羨慕地說:“許春花進門后,周二就差一點沒把她當菩薩一樣供起來了——捧在手里怕掉了,含在嘴里又怕化了,反正周二在家的時候,什么重活、臟活他都不讓許春花沾上手,那會兒可眼饞死咱們鎮上的那幫娘們兒了。”
創新是引領發展的第一動力,是建設智慧城市的戰略支撐。揚中市產業特色鮮明,智慧城市建設給揚中傳統產業帶來新機遇的同時也帶來了新挑戰。雖然揚中已經在加快主導產業與現代信息技術的融合,但不可否認的是揚中市傳統產業的自主創新能力仍然較弱,部分產業項目建設進展較為緩慢,而新產業、新業態的成長需要更長時間,大項目、新項目的儲備不足,導致城市發展后勁較弱。
a)0~1s:手爪1夾取;b)2~4s:豎梁上升550mm;c)5~8s:橫梁掛板向右平移800mm;d)9~11s:末端執行器旋轉180°;e)12~14s:豎梁下降550mm;f)15~16s:手爪2抓取;g)17~18s:豎梁上升300mm;h)19~21s:末端執行器旋轉180°;i)22~23s:豎梁下降300mm;j)24~25s:手爪1放下;k)26~28s:豎梁上升550mm;l)29~32s:橫梁掛板向左平移800mm;m)33~35s:末端執行器旋轉180°;n)36~38s:豎梁下降550mm;o)39~40s:手爪2放下。
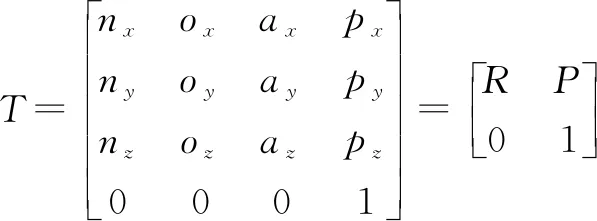
式中,
是齊次坐標變換矩陣,是一個4×4階矩陣,表示了被描述的坐標系中的點經過
的變換后變成了參考坐標系中的點。
為旋轉矩陣,
為平移矩陣。
a)橫梁掛板:step(time,5,0,8,800)+step(time,29,0,32,-800);
再對模型添加“驅動”,包括:平移驅動(適用于移動副和圓柱副),旋轉驅動(適用于轉動副和圓柱副)。驅動作用于約束之上,所以在上述的約束之上添加相對應的驅動,即在轉動副處添加旋轉驅動,其余移動副出添加平移驅動。
本文中解決的是一般的逆運動學問題,即根據給定的齊次變換矩陣和機械手的其他參數,求出其關節變量。根據已知的末端執行器的位姿表達式,再結合坐標系變化的表達式及表1,可列出以下非線性三角函數方程組:
假如未成年人不可以見義勇為,見義勇為的時候也不應該受到鼓勵的話,那么社會風氣將變得無比漠然,我們又該如何弘揚正氣,弘揚我們心目中的正義呢?
d)末端執行器:step(time,9,0,11,180d)+step(time,19,0,21,-180d)+step(time,33,0,35,180d);
e)手指1、2、3:step(time,15,0,16,15)+step(time,39,0,40,-15);
f)手指4、5、6:step(time,0,0,1,15)+step(time,24,0,25,-15)。
完成函數編寫及其他操作后,再設置終止時間為10和步數為2000,并選擇分析類型里的運動學。完成以上操作后即可進行運動仿真,得出構件的曲線圖,包括位移、速度和加速度曲線圖。
a)橫梁掛板分析
根據分析,橫梁掛板只在5~8s和29~32s時間段內進行了左右平移,位移、速度及加速度都只在X方向上有變化。在啟動和停止的瞬間,加速度波動較大,其余時間相對穩定;運動期間,速度最大值達到0.4m/s。
b)豎梁分析
今年7月一名中年男子持刀作案,致兩名女子一死一傷后,逃離了現場……這時一個網名叫“棉花糖”(真名邱波,婁底市第一人民醫院護士)的女孩挺身而出,一邊用衛生巾給傷者止血,一邊請周圍一個正拍著視頻的男子給120打電話,然而,此人冷漠地拒絕了。想在旁邊的米粉店坐一下,老板連聲趕她們走。后來,“棉花糖”叫了出租車,與同行的表姐一起將傷者送到了就近的醫院,傷者才因此得救。
由于豎梁與橫梁掛板相連,即使豎梁不運動,也會隨著橫梁掛板一起運動,所以在X方向上的位移、速度及加速度圖與橫梁掛板相同。豎梁在Y方向的6次運動時,速度最大值分別達到0.45m/s和0.41m/s;在啟動和停止瞬間,加速度波動較大。
葉綠素含量測定采用Deng[9]等的方法稍作修改。青圓椒組織用4 ℃的丙酮:乙醇(2:1)溶液勻漿,在通風櫥內避光過濾至50 mL棕色容量瓶中,至青圓椒勻漿組織變白,然后定容至刻度,測定66 nm和645 nm處吸光值。
c)末端執行器分析
根據分析,由于末端執行器與豎梁相連,且末端執行器旋轉也不影響位移的變換,故位移曲線圖與豎梁相同。由于末端執行器與豎梁相連,在X、Y方向上的速度與豎梁相同;而在9~11s、19~21s、33~35s時間內旋轉了180°,對X、Y的影響較小,主要為Z方向上的速度變化。
由于末端執行器與豎梁相連,在X、Y方向上的曲線圖與數量相似,但Z方向上較為明顯,在開始轉動和停止瞬間,波動較大之外,其余時間較為穩定。末端執行器只在X、Y方向上有角加速度變化,最大值達到95d/s。
對各部件的三種曲線圖的分析,各部件的位移較為平滑;都做的是變加速運動,沒有出現太大的波動,運動較為平穩;不需要高精準的定位時,啟動和停止瞬間的加速度的較大跳躍是允許存在的。故整個機械手裝置運動較為平穩,各構件設計合理,選擇的方案可行。
4 結論
本文以三自由度的物料搬運桁架式機械手為研究對象,對其運動學問題進行分析研究,通過建立D-H坐標,寫出運動學方程,求出正、逆運動學問題的解,了解機械手在空間的運動情況,及末端執行器的位姿情況,為后續運動仿真分析做基礎。使用Adams對機械手進行運動學仿真分析,輸出運動動畫和橫梁掛板、豎梁和末端執行器的位移、速度和加速度曲線圖,分析曲線圖,最后得出機構設計合理、方案可行。
隨著德國“工業4.0”計劃和中國“智能制造2025”的提出,自動化設備穩定發展取得了巨大的進步,機械手在未來的發展方向是智能化、機電一體化、高精度、高效率、環保等等。不僅可以在各種環境下正常運行,而且還可以長時間的工作,以更高的效率完成任務,成本也很低。
[1]谷明雨. 物料搬運機械手的系統分析與仿真[D]. 沈陽:東北大學,2006.
[2]楊韜,蔡長韜,周延,馬飛達. PCB上下料機械手設計與仿真[J]. 機床與液壓,2017,45(21):26-30.
[3]李桂莉, 武洪恩, 劉志海. 搬運機械手的運動學分析[J]. 煤礦機械,2007,28(02):62-65.
[4]許琳. 物料搬運機械手的建模與仿真[D]. 濟南:齊魯工業大學,2016.
猜你喜歡
現代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現代農業(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06