科研成果融入實驗教學的研究與實踐
——以《船舶控制系統》課程為例
2022-06-15 08:38:00宋吉廣梁利華吉明
教育現代化 2022年11期
宋吉廣,梁利華,吉明
(哈爾濱工程大學 智能科學與工程學院,黑龍江 哈爾濱)
一 引言
科教融合的概念由德國教育家Wilhelm Humboldt 在十九世紀首先提出[1]。促進教學與科研的協同發展,增進教學與科研的有機融合是高等學校培養高素質人才的重要途徑[2]。“學然后知不足,教然后知困”,教學和交流過程中會發現值得研究和急需解決的新問題和新對象,而科學研究也必然會為教學提供新觀點、新內容。
2015 年5 月,國務院辦公廳發布的“關于深化高等學校創新創業教育改革的實施意見”文中明確提出要推進教學、科研與實踐的緊密結合,把最新科研成果和學術發展有機融入教學[3]。2019 年10 月,教育部發布的“關于深化本科教育教學改革全面提高人才培養質量的意見”文件中明確提出“強化科研育人功能,推動高校及時把最新科研成果轉化為教學內容,激發學生專業學習興趣”[4]。
在科教融合方面,教育工作者已經進行了理論和實踐上的有益探索[5-9]。文獻[6]分析了科研與教學之間內在的差異。為了科教融合,作者提出必須重新認理解和認識教學,使教學能夠獲得與科學研究一致的屬性。文獻[7]分析了三種不同的科研與教學的融合方法。文獻[9]以相互促進一流學科建設和實驗教學任務為目標,提出由教師設計開發實驗教學所用設備。
作為“三海一核”人才的重要培養基地,哈爾濱工程大學很多專業課的設置與船舶與海洋相關。作為“自動化”專業的主干課,《船舶控制系統》以船舶的操縱性和耐波性為基礎,講授船舶的運動及姿態控制,是自動控制原理在船舶方面的典型應用。到目前為止,在《船舶控制系統》教學中,并未充分地將前沿的科研成果和科研思維融入教學中,未充分引導學生的科研興趣,未充分調動學生的學習熱情。形成這一現象的一個原因是教師從事的科研活動與教學課程沒有實現較好的匹配。
受制于場地和經濟因素,《船舶控制系統》的實驗課幾乎不可能在實船上進行。同時該課程的專業性決定了實驗教學設備很難直接采購,而開發相關的教學儀器成本高、周期長。將科研成果應用于《船舶控制系統》實驗課程教學,通過對科研樣機的改造可以構建半實物仿真系統,能夠有效地提高學生掌握船舶控制系統中典型裝置的原理、結構和設計過程。將最新的科研成果融入教學,能夠培養學生的科研興趣,提高學生的科研能力,了解最新的科研和試驗成果,擴寬自動化專業學生在該領域的視野,對未來走向全國各行業的自動化專業的學生的科研能力具有很好的促進作用。
二 實驗課程要求
作為“自動化”專業的主干課,《船舶控制系統》以船舶的操縱性和耐波性為基礎,講授船舶的運動及姿態控制,是自動控制原理在船舶方面的典型應用。
船舶操縱性主要是指船舶在操縱人員手動或者自動操縱控制裝置的作用下,保持或者改變其原來運動狀態的性能。這里面包含相互制約的兩個方面:一是船舶以一定的航行速度盡量保持直線前進。二是為了避免碰撞,保證船舶的航行安全,則需要船舶在控制裝置的作用下按照操縱人員的要求及時、迅速、準確地改變其原來的航速或者航向。
船舶耐波性是指船舶在風浪等外力作用下產生搖蕩和砰擊、上浪、失速等現象時仍具有足夠穩性和結構強度,并能保持一定航速安全航行的性能。劇烈的橫搖運動會增加船舶航行阻力,增加燃料消耗;導致船上人員暈船,降低其工作效率;增大貨物損失的風險,嚴重時甚至會導致船舶傾覆。
船舶控制系統的實驗課程設置中,包含四個重要的實驗即操縱性模型參數的獲取、航向控制器的設計、橫搖運動模型參數的獲取和橫搖控制器的設計。前兩個實驗屬于船舶操縱性的內容,而后兩個實驗屬于船舶耐波性的內容。由于不具備實船實驗的條件,以往實驗中操縱性模型參數的獲取和橫搖運動模型參數的獲取均通過之前實船試驗曲線進行計算。實船試驗曲線有限,導致實驗數據和實驗報告雷同。同時,橫搖控制器和航向控制器的結果通過數字仿真以曲線的形式顯示。使得《船舶控制系統》課程的實驗課,類似于理論課程的一次簡單應用,不能鍛煉學生的動手能力,不能有效加深學生對理論內容的理解,不能有效激發學生的科研興趣。
在《船舶控制系統》實驗教學中,如何培養學生的科研興趣,提高學生的科研能力,了解最新的科研和試驗成果,擴寬自動化專業學生在該領域的視野是比知識本身更重要的任務。
三 科研成果對實驗課的融入
(一) 科研設施與科研條件
哈爾濱工程大學船舶減搖與控制技術研究所一直從事船舶減搖和船舶姿態綜合控制技術的研究。通過多個預項目、科研項目的實施,目前實驗室擁有四條船舶模型、兩臺六自由度船舶運動模擬臺。同時具有自動舵和舵機、減搖鰭實物和樣機、船舶運動試驗小型水池、海洋環境仿真系統等,以往這些設施主要服務于科研工作。在項目和設施的支持下研究所在船舶運動模型的建立、船舶水動力導數的獲取、環境擾動模型的建立與仿真、船舶操縱性、船舶耐波性、以及操縱性和耐波性的聯合控制方面獲得了豐富的科研成果[10-11]。
(二) 科研設施的改造
1.船舶操縱性實驗
利用實驗室現有的六自由度船舶運動模擬臺、具有舵和螺旋槳的自航模、計算機構建操縱性實驗半實物仿真系統(如圖1 所示)。整個系統由以下四個部分組成:

圖1 船舶操縱性實驗裝置組成框圖
(1)環境仿真子系統
根據設定的環境擾動,如波高、浪向、風速、風向、流速、流向等條件和教師設置的船舶模型,計算六個自由度的干擾力和干擾力矩。
(2)船模子系統
船模放置在船舶運動模擬臺之上,船模子系統由雙槳、雙舵、四個鰭及其各自的驅動器和伺服電機組成。船模控制器由小巧而堅固的工業化控制與采集系統NI-cRIO(National Instruments-CompactRIO)構成,通過WiFi 接收學生PC 機產生的控制指令,通過工業總線EtherCAT 和CANopen驅動舵、鰭、槳等執行器跟蹤控制指令。同時NIcRIO 根據電機編碼器反饋的執行器狀態(舵角、鰭角和螺旋槳轉速)和教師設置的船舶模型,產生六個自由度的控制力和控制力矩。
(3)船舶運動模擬臺子系統
船舶運動模擬臺子系統主要組成部分是一個六自由度并聯Stewart 平臺。該子系統的PC 機接收干擾力和干擾力矩、控制力和控制力矩、船舶模型參數、初始位置等信息,計算出船舶六個自由度的位置和速度,即經緯度、垂蕩值、橫搖角、縱搖角、首向角以及各個自由度的速度。
由于Stewart 平臺的運動空間小,并不能夠完整復現船舶在無限海域中的首向、縱向和側向等運動運動狀態。因此,在這幾個自由上需要加入洗出算法[12-13],以便將船舶的運動姿態轉換為平臺可以實現的姿態,并盡量真實的模擬船舶運動。經過洗出算法獲得的船舶姿態送入PMAC(Programmable Multi-Axes Controller),由PMAC 完成反解運動獲得的六個伺服電動缸的位移,并實現伺服電動缸的閉環控制。
平臺上除了安裝船模外,中心位置還安裝有IMU(Inertial Measurement Unit)測量船模的運動姿態,對Stewart 平臺的反解計算進行驗證。同時IMU測量的位置、速度融合船舶運動模擬臺子系統對船舶位置的計算,給出經緯度、垂蕩值、橫搖角、縱搖角、首向角以及縱蕩速度、橫蕩速度、垂蕩速度、橫搖角速度、縱搖角速度和首搖角速度發送給人機交互子系統的學生PC 和三維顯示PC。
(4)人機交互子系統
人機交互子系統中的學生PC 和教師PC 均可設置和顯示環境擾動參數,而船舶模型參數對學生是一個黑箱,由教師PC 進行設置。學生PC 可以接收船舶運動模擬臺子系統給出的經緯度、垂蕩值、橫搖角、縱搖角、首向角以及縱蕩速度、橫蕩速度、垂蕩速度、橫搖角速度、縱搖角速度、首搖角速度。也可以接收舵、鰭等執行器的角度和螺旋槳等執行器的速度。
在隨動操縱模式下,學生PC(圖2)可以通過舵輪和車種推桿對舵角和螺旋槳轉速進行控制。在自動模式下,學生可以編寫航向控制程序(自動舵)、減搖控制程序、Z 型試驗程序、平行移船實驗程序等完成對船舶模型姿態和執行器的控制。三維顯示PC 同時可以接收船模子系統發送的執行器狀態,驅動三維顯示中的舵、鰭和螺旋槳產生相應的運動。

圖2 學生PC 控制臺與三維顯示PC 界面
2.船舶耐波性實驗設備
由于Stewart 平臺可以模擬船舶的橫搖運動,同時船模子系統配備了減搖鰭,上述實驗裝置可以進行船舶的耐波性實驗。然而利用實驗室的水池和船模(圖3)可以更真實地進行耐波性實驗。

圖3 船舶耐波性實驗設備
該實驗設備可以通過PC 機采集安裝于船模中的IMU 發送的橫搖角和橫搖角速度、控制干擾模擬裝置使船模產生強迫橫搖運動、控制減搖鰭的運動。
(三) 科研成果和科研思維的引入
將船舶控制的科研成果轉化為《船舶控制系統》實驗課教學內容,引入最新的研究成果,可以對實驗課內容進行創新,拓寬課程內容,培養學生的科研興趣。如將舵鰭聯合控制的內容引入可以使學生更深入了解船舶運動之間的耦合,將自動控制原理中MIMO 系統的設計融入到操縱性和耐波性的綜合控制問題,完成知識進階。
科研的過程包含提出問題、分析問題并解決問題。科研思維符合元思維特征,是一種抽象了的思維[14]。通過將科研思維的內化,轉換為教學元思維,從而實現從封閉的教學思維向動態教學元思維的變化。在實驗課教學不要首先把科研過程和科研成果呈現給學生,而是要形成一種設疑思維,探討為什么會提出這樣的科研問題,以問題意識貫穿實驗課過程。與此同時不斷總結思考實驗難題和問題, 凝練新的問題,從而使師生的思維共同發展。
四 實驗的實施
(一) 船舶操縱性實驗
操縱性實驗首先要在無干擾的條件下獲得船舶操縱性的野本模型參數,然后根據模型參數設計自動舵控制程序,加入海浪、海風和海流等環境干擾,驗證自動舵控制程序是否達到了預期目標,如果沒有達到,需要找出問題并解決問題。
如前所述,應以問題意識貫穿實驗課過程。讓學生自己選擇是通過“Z 性操縱實驗”或“平行移船實驗”來獲得模型參數,并給出選擇的原因。學生可以更明確實驗的實施條件和過程、模型的限制等,如“平行移船實驗” 只能建立低頻模型,并不適用于高頻模型的建立,而要建立高頻模型,可利用正弦操舵實驗來進行。通過對這些問題的思考,使學生不僅知其然而且知其所以然,同時也培養了學生的問題意識。通過執行自己編寫的實驗程序來獲得舵角和航向隨時間變化的數據,根據這些數據獲得了野本模型的參數。
相對于執行實驗程序,很多學生更喜歡嘗試以隨動方式對舵和螺旋槳進行控制,同時觀察三維顯示PC 上船舶的姿態和航跡。通過隨動方式,學生可以更深入了解操縱性方程的大慣性特點,對回轉過程中的橫傾和降速有更直觀的了解。
海上航行的船舶不僅受到低頻海風和海流的擾動的影響,還會受到高頻海浪擾動的影響,因此在自動舵的設計中可以同時考慮這樣的影響。通過實際船舶中自動舵對環境擾動的處理,引導學生將前面學習的知識貫通,了解船舶操縱性是一個慣性很大的低通特性環節。首向運動對低頻擾動響應幅值比較大,而對高頻干擾響應比較弱。因此在自動舵設計中,將海浪擾動參與控制,必然會引起頻繁地動舵。導致增加了操舵引起的航行阻力,同時要求舵機有較高的響應頻率,從而增加了功率的要求。
通過學生對包含高頻干擾和不包含高頻干擾的自動舵的設計、驗證和對比,加深對實際工程問題的了解,避免知識的僵化。
(二) 船舶耐波性實驗
耐波性實驗首先要在無干擾的條件下獲得船舶橫搖運動模型的參數,然后設計減搖鰭控制程序。通過干擾模擬裝置,強迫船舶產生橫搖,再通過減搖鰭的運動來減小橫搖運動。
首先讓學生了解橫搖衰減試驗的原理,提出橫搖角速度和阻尼力矩之間有什么關系?通過設疑思維,加深學生對實驗背后理論知識的理解。然后使船模傾斜超過15 度進行衰減試驗,通過PC 機采集的橫搖角和橫搖角速度隨時間變化曲線,獲得船舶的橫搖運動參數。普通減搖鰭依靠升力來產生穩定力矩克服環境擾動力矩,只有船舶具有航速時才能夠減搖,而且在設計航速之下,航速越高效果越好。在兩項國家自然科學基金和科研項目的支持下,基于阻力原理的零航速減搖鰭在實船上已經獲得應用。
從海洋工程船、科學考察船對零航速減搖的需求出發,通過學生了解零航速減搖鰭的科研過程,引導學生如何提出問題,分析問題和解決問題,培養學生的科研興趣和科研素質。在建立橫搖運動模型的基礎上,根據零航速下鰭上穩定力的公式和減搖效果的要求,設計鰭運動控制程序。并在船模上對程序進行驗證。PC 機可以采集減搖和未減搖時,船模的橫搖角和橫搖角速度隨時間的變化數據,根據這些數據可以計算減搖鰭在零航速下的減搖效果。
五 科教融合的實施效果
在《船舶控制系統》實驗課程的教學中,通過科教融合,不僅培養了學生的問題意識和科研思維。而且教學效果有了明顯提升。
《船舶控制系統》課程在大四上學期進行,學生面臨著找工作、考研復習、異地保研面試等很多占用學生精力與時間的事情,而實驗課在理論課程完成后進行,通常距離考研日期只有半個月左右。導致教學效果尤其是實驗課的教學效果不太理想,如何提高教學效果一直是課程組教師關注和希望解決的問題。
從2019 年開始,通過實驗設施在實驗課程中的應用,科研成果和科研思維的引入,最明顯的感覺是實驗報告的雷同率大幅下降。表1 列出了對兩個班級的統計結果。
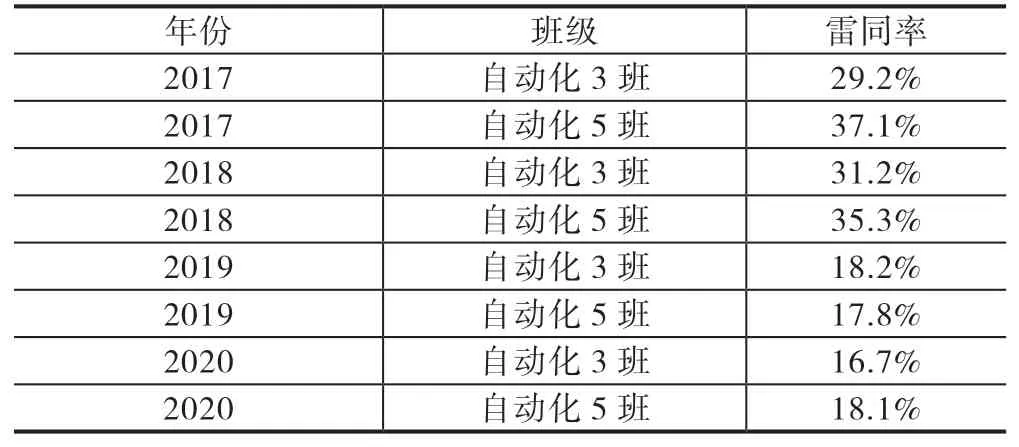
表1 實驗報告雷同率統計
而專業課程達成度評價表(成績定量分析法)中課程目標達成值分別由0.74 與0.75 提高到了0.79和0.80。
六 結語
將課題組的科研設備和大量科研成果融入到本科生《船舶控制系統》實驗課程的教學中,是一次有益的研究與實踐。通過科教融合,在實驗教學中引入最新的科研成果,引入科研過程,使學生了解如何發現問題、分析問題并解決問題。可以開闊學生視野、增加學生對課程的興趣。科研成果的融入,改善了課堂教學效果,提高了課程目標達成值。
相比于實驗設施的構建和科研成果的引入,更重要的是科研思維進課堂。相比于低年級的教學中教師要具有設疑意識,用問題貫穿教學過程,高年級教學中更要重視培養學生的設疑意識,要敢于對老師的科研過程、科研成果和教學內容提出質疑。這對即將進入研究生階段的學習的學生會有很大幫助。
由于《船舶控制系統》課程的專業性,如何更好地將科研成果和科研思維融入實驗課教學是一個需要持續改進的過程。需要在教學互動中探索、實踐和提高。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
光學精密工程(2016年6期)2016-11-07 09:07:19
發明與創新(2016年38期)2016-08-22 03:02:52