廢舊手機螺釘自動化拆解設備關鍵技術研究*
2022-06-16 12:46:14尹鳳福王瑞東杜澤瑞莊虔曉
計算機與數字工程 2022年5期
關鍵詞:優化
安 瑞 尹鳳福 王瑞東 杜澤瑞 莊虔曉
(青島科技大學機電工程學院 青島 266061)
1 引言
現如今,手機更新迭代加快,淘汰的廢舊手機數量與日俱增,關于如何處理廢舊手機也已經成為了一個巨大的難題[1]。據工信部的數據顯示,我國從2014 年至今,廢舊手機存量累積約18.3 億臺。2019 年全國報廢手機預計達到4.99 億部,而隨著5G 網絡普及,2020 年廢舊手機數量將增至5.24 億臺,將廢舊手機回收并進行拆解利用是解決這個問題的重要辦法[2]。
在手機回收后的拆解過程中,各類回收價值較高的元器件之間大都是通過螺釘進行固定,因此,螺釘的拆解在整個拆解過程中扮演著舉足輕重的角色,且螺釘的拆解效率直接影響了廢舊手機整機拆解的效率與所帶來的經濟價值[3]。
傳統的手機螺釘拆解工藝,拆解設備相對落后,拆解手段原始等情況在很大程度上降低了手機拆解的效率。一般的人工拆解,對操作人員的熟練度要求較高,且受操作人員自身的狀態的影響;機械化的拆解往往是利用電批外加人工操作,這樣的拆解方式成本較大,經濟性不高。
因此本文提出一種廢舊手機螺釘自動化拆解設備,結合Halcon 圖像處理軟件,對螺釘孔視覺定位的圖像處理算法方案進行了設計;同時針對螺釘拆解序列沒有合理規劃的問題,利用遺傳算法對螺釘拆解序列進行了優化,并給出了螺釘拆解優化路徑圖。
2 系統方案
螺釘自動化拆解設備要實現適應不同型號手機的螺釘拆解工作,完成穩定精準快速的拆解,根據螺釘拆解的工藝流程,設計整體的工藝方案,可以分為機械執行系統、螺釘拆解系統、圖像采集與處理系統以及集成控制系統[4]。機械執行系統主要包括三軸直接坐標機器人以及手機裝夾機構,其中手機裝夾機構是由電動夾爪配合特定夾具完成夾持的動作,且夾緊力可調;螺釘拆解系統主要由工業電批和電批治具組成;圖像采集與處理系統包括工業相機、光源、工控機以及Halcon 圖像處理軟件組成。Halcon 是由是德國MVtec 公司開發的一套完善的標準的機器視覺算法包,擁有應用廣泛的機器視覺集成開發環境[5~6]。
集成控制系統是通過“PC 機+固高GEN 系列EtherCAT 總線網絡運動控制器+固高gLink 擴展IO模塊+CCD 相機”開放式運動控制方法,PC 機作為控制系統的中心上位機,EtherCAT 總線網絡運動控制器以及擴展IO 模塊負責整個運動控制系統的完成,CCD相機用于運動坐標的提取與反饋[5]。
PC機發送螺釘拆解信號,gLink擴展IO模塊傳遞信號對手機裝夾機構執行加緊動作,CCD相機進行圖像采集,將采集到的圖像傳輸至PC機,執行圖像處理算法獲取螺釘孔的坐標,將坐標轉化,通過EtherCAT 總線網絡運動控制器發送給三軸直角坐標機器人進行移動,移動至坐標正上方位置后,再由gLink 擴展IO 模塊發送信號至工業電批進行螺釘拆解。控制系統結構如圖1所示。

圖1 控制系統結構圖
3 螺釘孔位置圖像處理算法研究
在相機采集的圖像中迅速準確的確定螺釘位置的中心坐標,三軸直接坐標機器人才能夠精準地進行定位,從而提高拆解的效率以及穩定性。因此,對螺孔位置的快速準確定位在整個自動化拆解過程中有著極其重要的意義[5]。對于手機內部螺釘分布而言,存在著小、密、精的特點,此外內部背景較為復雜,也對圖像的分析處理有著很大的影響[5]。為了克服此困難,提出了將相機拍攝圖片進行適度分割的方法,即通過繪制矩形ROI 區域(region of interest)將拍攝圖片分割成部分圖片并對目標圖像進行分析與處理。這樣可以極大地減小復雜背景的干擾,減少工作量,提高準確率。以小米4 手機為例,圖2 為相機拍攝圖片與繪制的矩形ROI 區域對比圖。

圖2 相機圖片與ROI區域對比圖
螺釘孔可以近似為圓形,對于直線、圓、橢圓、拋物線的分類檢測通常采用Hough 變換法[7]。Hough 變換的主要優點是能容忍特征邊界描述中的間隙,并且相對不受圖像噪聲的影響[5]。但其隨著計算量以及參數個數的增加對計算機本身內存負擔也越來越重,不適合進行大批量的實時檢測[5,8~9]。因此本文針對手機螺釘拆解的特殊性,提出了如圖3 所示的圖像處理算法流程,通過標準的機器視覺算法包Halcon 軟件,利用BLOB 形態學分析進行初次的粗定位,其次在亞像素精度下,提取粗定位區域的邊緣,通過一系列的邊緣像素點和圓擬合方程計算得到最接近的螺釘孔形狀,從而完成二次的精確定位,提高了識別的魯棒性以及準確性[5,10~11]。
相機啟動抓取圖像后,利用算子read_image 以及get_image_size 獲取圖像以及尺寸信息,調用draw_rectangle1 算 子,gen_rectangle 算 子 以 及reduce_domain算子將圖像“分割”并顯示,隨后在“分割”后的目標圖像內進行BOLB 分析,即首先調用算子threshold 進行圖像閾值分割,然后調用算子closing_circle 或opening_circle 對閾值分割后的圖像進行閉運算或開運算,隨后調用算子connection對形態學處理后的圖像進行提取連通分量,至此得到如圖4 所示圖像[12]。隨后調用算子shape_trans,擬合最小外接圓,得到如圖5 所示圖像。至此,完成螺釘孔位置的初次的粗定位。
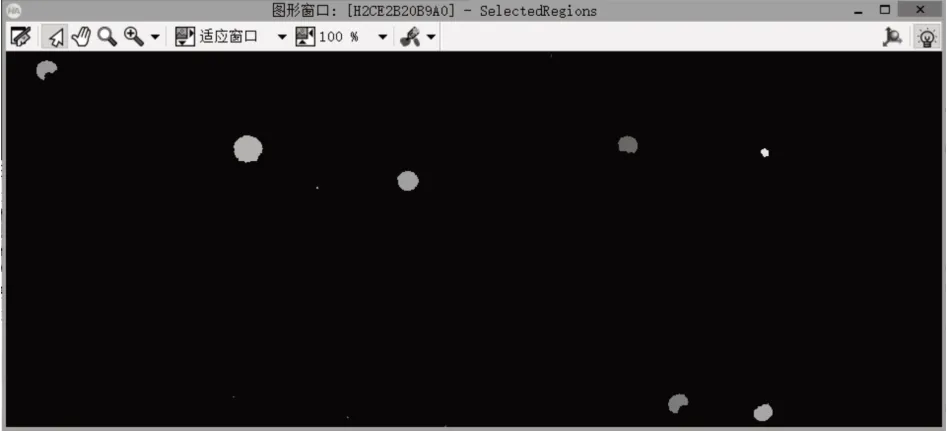
圖4 進行BLOB分析后的圖像
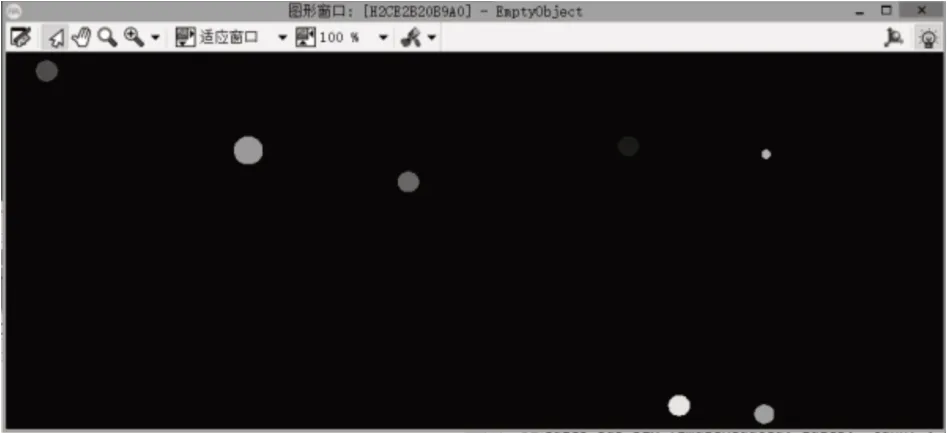
圖5 調用shape_trans算子后所得圖像
然后利用edges_sub_pix 和canny 算子對第一輪粗定位后的區域進行邊緣檢測,篩選出所有的邊緣,接著用輪廓分割算子segment_contours_xld將輪廓分割為直線或者圓,再利用分割后輪廓的全局屬性cont-approx 識別出所有的圓弧,利用fit_circle_contour_xld 算子擬合圓弧輪廓,同時添加半徑篩選條件,最后通過gen_circle_contour_xld 算子重繪生成合條件的擬合圓,并展示在圖像中[13]。如圖6 所示為整體識別效果圖,圖7 為單個螺釘孔的識別效果放大圖。

圖6 整體識別效果圖
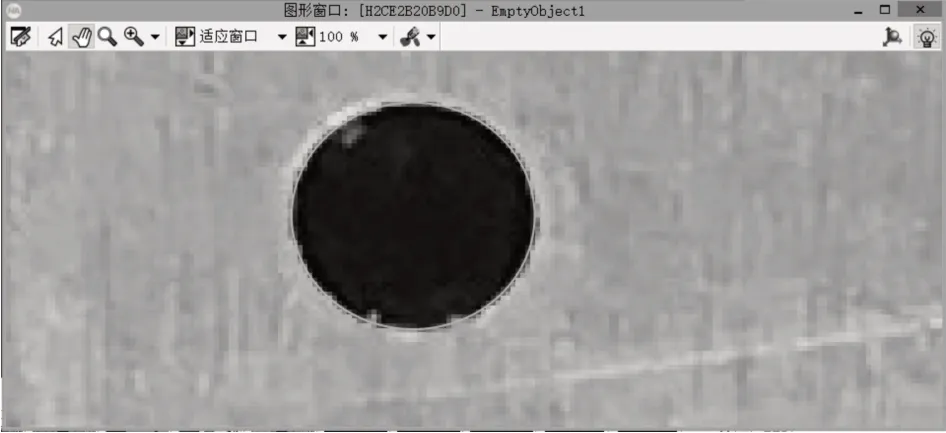
圖7 單個螺釘孔識別效果放大圖
4 拆解路徑優化問題研究
螺釘的拆解序列是指由某個指定原點出發三軸直角坐標機器人依次移動至坐標位置執行螺釘的拆解工作,為了提高螺釘的拆解效率建立最優的拆解序列,就需要對拆解路徑進行相應的分析優化[5,14]。螺釘拆解序列的問題關系到移動路徑的長度,從而影響整個拆解過程的時長,而尋找這類問題的最優解就可以轉化為TSP問題(旅行商問題),即尋找所用時間最短,總體的移動路徑最短的拆解序列[5]。
4.1 TSP問題描述
TSP(Traveling Salesman Problem)問題,即旅行商問題。假設有一個旅行商人要拜訪n 個城市,他必須選擇所要走的路徑,路徑的限制是每個城市只能拜訪一次,而且最后要回到原來出發的城市。路徑的選擇目標是要求得的路徑路程為所有路徑之中的最小值[15]。對于此類問題,往往利用近似算法來求解,主要有遺傳算法、模擬退火法、蟻群算法、禁忌搜索算法、貪婪算法和神經網絡等[16]。
4.2 遺傳算法
遺傳算法(GeneticAlgorithm,GA)是通過模擬生物的進化過程來進行優化搜索的隨機化搜索方法,它最早是由美國J.Holland 教授提出[5]。作為一種全局優化搜索算法,其主要特點是群體搜索策略以及群體中個體之間的信息交換,搜索模式并不以梯度信息為基礎,具有簡單通用,穩定性強的特點,尤其適用于難以用精確算法解決的非線性難題,已經成為求解TSP問題比較有效的方法之一[17]。
遺傳算法的實現大致包括如下因素:確定初始群體、編碼、設計適應度函數、設置控制參數、遺傳算法操作、處理約束條件[5,18]。
編碼是將所需解決問題變換至遺傳算法的搜索空間內[5,19]。經過編碼處理后就可以隨機產生初始種群,若經過數學映射,可得到N 個初始串結構數據,而每個初始串結構數據可以視為一個個體,由此N 個個體便構成了一個群體。考慮到手機內部螺釘數量相較而言并不多,種群的多樣性以及質量不會被較大影響,因此采用標準遺傳算法隨機產生初始種群。
進行設計變量:

進而產生染色體:

適應度函數是用來度量個體適應度大小的函數,適應度函數是操作選擇的唯一依據,它關系到算法的收斂速度和最優解的尋找[5]。針對螺釘拆解序列優化的問題將適應度函數映射為途徑全體螺釘孔中心坐標點后機械手移動的最短距離,即目標函數越小,種群中個體的適配值越大,因此是屬于求解最小值一類的問題[5]。
假設將目標函數定義為f(x),適應度函數定義為Fit(f(x)),將f(x)轉化Fit(f(x))并求解最小值,總結為以下三種方法:
其中,系數Cmax是f(x)最大值估計,一般是適當的相對較大的數。

其中,c為目標函數界限的保守估計值。
根據分析,選擇如下適應度函數:

其中,(xi,yi)表示第i 個螺釘的位置坐標,(xi-1,yi-1) 表示的是第i-1 個螺釘的位置坐標,n 表示螺釘的數量,適應度函數可以理解為機械手拆解完第n 個螺釘后,再返回至起始待拆解螺釘的位置的距離的倒數,因此選擇適應度函數值盡可能大的個體,值越大則表明個體的品質越好,反之越差。
4.3 手機螺釘拆解路徑優化模擬
為了提高拆解的效率,縮短拆解的時間,現應用遺傳算法對手機內部螺釘拆解路徑進行模擬優化[5]。以榮耀6手機為例,創立直角坐標系,對手機內的螺釘位置進行坐標轉化,轉化后的坐標為[4.50;5.00];[21.00,4.50];[47.50,4.50];[63.00,5.50];[13.50,27.00];[21.50;57.00];[3.50,72.50];[4.50;113.00];[4.00;129.00];[37.00,141.00];[62.00,149.00];[21.50,103.00]。利 用Matlab 軟件通過遺傳算法輸入坐標進行路徑優化模擬,優化后的路徑圖如圖8 所示[5],路線為1→5→6→7→12→8→9→10→11→4→3→2→1,其 總距離為413.1245mm,遺傳算法進化過程圖如圖9所示。

圖8 路徑優化圖

圖9 遺傳算法進化過程圖
5 結語
廢舊手機螺釘自動化拆解設備目前在市場上類似的設備還未成熟,缺口較大,本文針對螺釘拆解工藝選擇搭建了設備的硬件以及系統控制方案,針對視覺定位需求利用Halcon 軟件設計了圖像處理的算法方案,以及利用Matlab軟件通過遺傳算法對拆解路徑進行了路徑規劃,結果表明遺傳算法迭代到第18 代達到最優值,并確定出最優路線的總距離為413.1245mm。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45