固定鴨舵雙旋彈全彈道動態穩定性及其影響因素1)
2022-06-16 05:49:58趙新新史金光王中原
力學學報 2022年5期
趙新新 史金光 王中原 張 寧
(南京理工大學能源與動力工程學院,南京 210094)
引言
隨著現代戰爭對彈藥精確打擊能力需求的提高,兼顧作戰性能和制造成本,設法改善常規彈藥射擊精度成為兵器彈箭發展的重要方向之一[1].在此背景下,為研制具有二維彈道修正能力的旋轉穩定彈,一種對常規旋轉彈加裝彈道修正組件改進而來的固定鴨舵雙旋彈應運而生[2].該類彈丸采用前/后體雙自旋結構,通過使裝有修正機構的前體在彈道初始段快速減旋,從原理上消除了后體轉速過快對姿態測量和機構動作等的不利影響[3].
自文獻[4]提出雙旋彈的概念以來,國內外機構和學者圍繞氣動數值模擬與實驗[5-11]、動力學建模及仿真[12-15]、修正與控制系統研究[16-22]等開展了大量工作,并取得一些成果.隨著研究的深入,近年來相關學者逐步對雙旋彈的角運動特性和穩定性理論展開研究.文獻[23]針對舵面偏角可調節的情況,分析了雙旋彈的飛行穩定性;常思江等[24-25]研究了鴨舵控制力和重力作用下雙旋彈的動態響應規律,并針對鴨舵周期性干擾引起的強迫運動,討論了舵面偏角、安裝位置和極轉動慣量比對共振幅值的影響;史金光等[26-27]通過建立雙旋彈復攻角運動方程,分析了不同控制力作用下彈丸攻角和速度偏角的運動特性,闡釋了其角運動形成機理和彈道修正的力學本質;Zhu 等[28]將攻角引起的舵面升力與后體空氣體動力一體化考慮,研究了固定鴨舵雙旋彈的動態穩定性條件;馬國梁等[29]針對前體滾轉角快速時變的動態穩定性問題,利用范數概念導出了固定鴨舵雙旋彈的絕對穩定性判據;李佳迅等[30]初步分析了雙旋彈的非線性角運動特性.
上述研究主要圍繞雙旋彈的角運動理論以及無控飛行時的穩定性問題展開,所得結果為該類炮彈的飛行穩定性判別提供了參考,但有關舵面參數對動態穩定性影響機理的分析較少,尤其是針對有控飛行時的動態穩定性問題,尚未形成有效判別方法.本文擬進一步研究固定鴨舵雙旋彈的全彈道動態穩定性及其影響因素,通過分析該類彈丸動力學特性,在小攻角條件下建立復攻角運動的狀態空間模型,導出狀態矩陣特征根實部皆負的一般性條件.據此利用常規旋轉彈的穩定性分析方法,分別提出固定鴨舵雙旋彈無控和有控飛行時的動態穩定性判據,并在后體參數確定的條件下推導舵面參數約束條件,討論操縱舵控制力系數導數、安裝位置和舵偏角對動態穩定性的影響,揭示該類彈丸動不穩定形成的原因.最后通過對復攻角運動在不同條件下的彈道仿真,驗證本文推導的動態穩定性判據和舵面參數約束條件的合理性,以期為該類炮彈的研制和前體結構設計與優化提供理論參考.
1 動力學建模
1.1 物理模型
固定鴨舵雙旋彈的結構如圖1 所示,其由前體和后體兩部分構成,在彈道飛行時通過調節前體滾轉角控制方位,對彈道進行一次或若干次修正.其中前體上差動布置的舵片1 和3 為減旋舵,產生反轉力矩使前體滾轉角速度在出炮口后快速下降,斜置角為 δF;同向布置的舵片2 和4 為操縱舵,提供彈道修正所需的控制力和力矩,舵偏角為 δD.

圖1 固定鴨舵雙旋彈結構示意圖Fig.1 The configuration of the fixed canard dual-spin projectile
固定鴨舵雙旋彈出炮口后無控飛行,前體滾轉角在反轉力矩作用下快速下降到某一平衡轉速,其值可以通過調節前/后體的滾轉阻尼力矩和減旋舵的舵面參數進行設計,一般為5~ 20 r/s;飛行一段時間后有控飛行,通過分析后續彈道諸元與預定彈道諸元的偏差,前體滾轉角在驅動電機作用下進行切換,并在一段時間內保持不變.
1.2 坐標系定義及轉換
1.2.1 基準坐標系
由地面坐標系平移至彈丸質心O而來,記為N.Ox軸沿水平線指向射擊方向,Oy軸豎直向上,Oz軸按右手定則垂直于Oxy面向右.
1.2.2 彈軸坐標系
用于確定彈軸的空間方位,記為A.Oξ 軸沿彈軸方向,Oη 軸在鉛直平面內垂直于彈軸向上,Oζ 軸按右手定則垂直于Oξη 面向右.該坐標系可由基準坐標系旋轉兩次而來,轉換矩陣為
式中,φa為彈軸高低角,φ2為彈軸方向角.
1.2.3 前體坐標系
用于確定前體的滾轉角方位,記為F.OξF軸沿彈軸方向,OηF軸在前體縱向對稱面內垂直于彈軸向上,OζF軸按右手定則垂直OξFηF面向右.該坐標系可由彈軸坐標系繞Oξ 旋轉而來,轉換矩陣為
式中,γF為前體滾轉角.
1.3 動力學模型
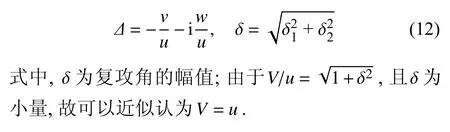
依據外彈道學理論,在小擾動條件下認為旋轉穩定彈的剛體彈道偏離理想彈道程度不大,故可以在復數平面下定義

式中,Φ 為復擺動角,Δ 為復攻角,分別描述彈軸相對理想彈道切線和速度矢量的空間方位; φ1,2和δ1,2均為小量.
定義 ω1為彈軸坐標系的轉動角速度,ω 為彈丸繞質心的轉動角速度,其在彈軸坐標系下的分量形式分別為

式中,φa=φ1+θ ,θ 為理想彈道傾角; γ 為彈丸滾轉角.根據 φa=φ1+θ ,由于 θ 變化較慢,故當 φ1,2均為小量時,φ ˙asinφ2為高階小量,ω1和 ω 則可簡化為
1.3.1 質心運動方程
對于固定鴨舵雙旋彈的質心運動方程,學者們普遍認為其與常規旋轉穩定彈的相似,只不過增加了舵面空氣動力的影響[17,25,27,28],在彈軸坐標系下的表達式為

式中,m為彈丸質量,V為速度矢量,F為合外力矢量.
將式(6)代入式(7),整理得到
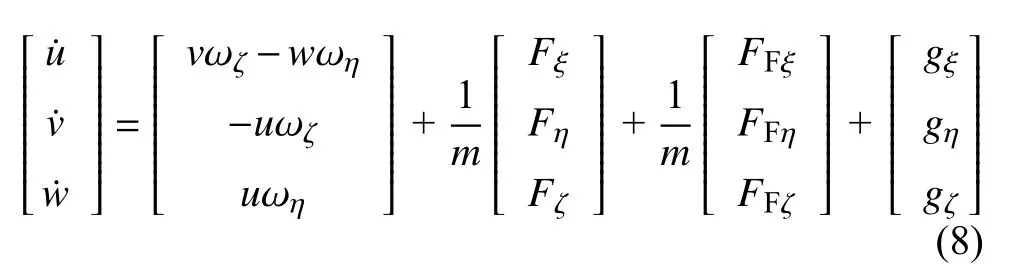
式中,u,v,w為速度在彈軸坐標系下的分量;Fξ,Fη,Fζ為后體空氣動力在彈軸坐標系下的分量;FFξ,FFη,FFζ為前體空氣動力在彈軸坐標系下的分量;gξ=-gsinθ,gη=gcosθ ,gζ=0 為重力加速度在彈軸坐標系下的分量.
1.3.2 繞質心運動方程
固定鴨舵雙旋彈的繞質心運動相對復雜,一些學者將前體滾轉角運動單獨考慮,建立了4 自由度繞質心運動方程[25,27];另一些則認為受反轉力矩、滾轉阻尼力矩和驅動電機等綜合作用,前體滾轉角運動相對獨立,故可以略去并建立了3 自由度繞質心運動方程[17,28].本文重點關心彈丸的復攻角運動特性,主要借鑒第二種思路,在彈軸坐標系下建立其繞質心運動方程為

式中,G為彈丸對質心的動量矩;M為合外力對質心的力矩.
為便于研究,忽略動不平衡,得到G在彈軸坐標系下的分量形式為
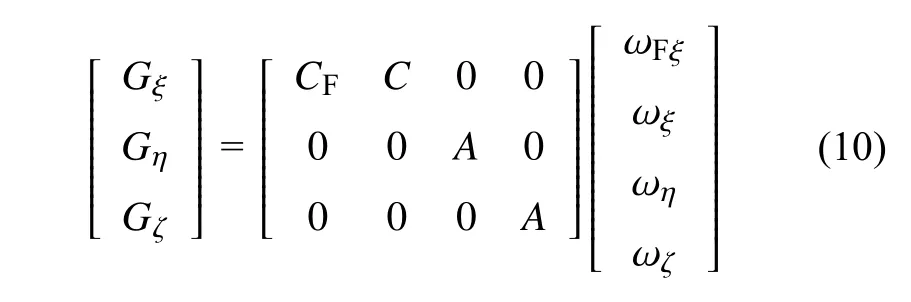
式中,Gξ,Gη,Gζ為動量矩在彈軸坐標系下的分量;CF,C,A為前體極轉動慣量、后體極轉動慣量和彈丸赤道轉動慣量; ωFξ=為前體滾轉角速度.
又由于固定鴨舵雙旋彈發射后,后體高速旋轉以維持彈丸飛行穩定(ωξ約為300 r/s);前體則會快速減旋到某一平衡轉速(ωFξ一般為5~ 20 r/s),并在有控飛行時固定于某一滾轉角方位保持不變(ωFξ近似為0).由量級大小比較可知 ωFξ?ωξ,則式(10)中Gξ主要由 ωξ決定,因此可以略去其中 ωFξ的影響,并將其代入式(9),整理得到
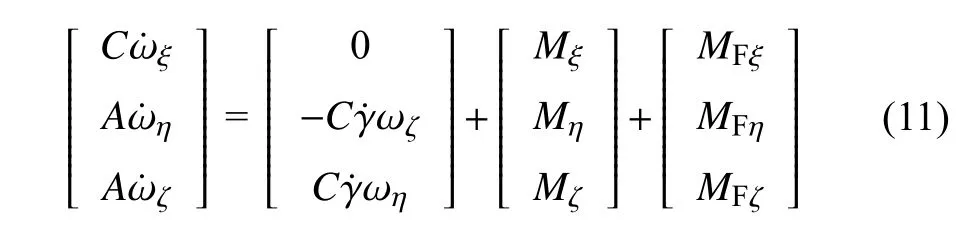
式中,Mξ,Mη,Mζ為作用在后體上的外力矩在彈軸坐標系下的分量;MFξ,MFη,MFζ為作用在前體上的外力矩在彈軸坐標系下的分量.
1.4 作用在后體上的空氣動力和力矩
為便于確定作用在后體上的空氣動力和力矩矢量,首先給出復攻角在彈軸坐標系下的表達式為
1.4.1 后體空氣動力
忽略較小的馬格努斯力,作用在后體上的空氣動力主要包括:沿速度反方向的阻力、在攻角平面內垂直于速度且在彈軸一側的升力,表達式分別為
1.4.2 后體空氣動力矩
忽略氣動偏心和動不平衡的影響,高旋后體在外彈道飛行過程中受到的空氣動力矩主要包括:靜力矩、赤道阻尼力矩、極阻尼力矩和馬格努斯力矩,表達式分別為
1.5 作用在前體上的空氣動力和力矩
為便于確定作用在前體上的空氣動力和力矩矢量,給出速度矢量在前體坐標系下的分量表達式為

據此可得操縱舵的有效攻角為

1.5.1 前體空氣動力
將僅由彈丸復攻角決定的前體空氣動力合并到后體上,單獨考慮由操縱舵產生的隨 γF周期性變化的控制力,其在縱向對稱面內垂直于V且在OyF軸一側,表達式為

式中,β 為OζF軸與速度矢量的夾角.忽略高階小量,在彈軸坐標系下的分量形式為

1.5.2 前體空氣動力矩
2 動態穩定性分析
2.1 線性化狀態方程
根據式(12) 中復攻角在彈軸坐標系下的表達式,導出復攻角運動方程為

利用式(8)將上式展開,并略去小量 δ1,2的乘積項,整理得到
為消去A1和A2中的公因子V和V2,將式(27)改寫為對弧長的導數,得到非齊次復攻角方程為
對于旋轉穩定彈,由于bx等組合參數和gsinθ/V2的量級較小,故略去上述參數間的乘積項,式(28)中各參數可以寫為

2.2 動態穩定性條件
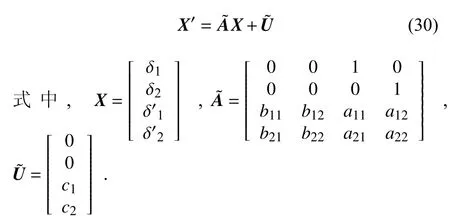
為便于研究固定鴨舵雙旋彈的動態穩定性,將式(28)轉換得復攻角運動的狀態空間模型為
2.2.1 無控飛行時的動態穩定性判據
無控飛行時,前體滾轉角運動在反轉力矩和滾轉阻尼力矩的作用下自由轉動,其轉速相對復攻角的慢圓運動頻率較大[27],故在一個慢圓運動周期內可以對中元素平均處理得到
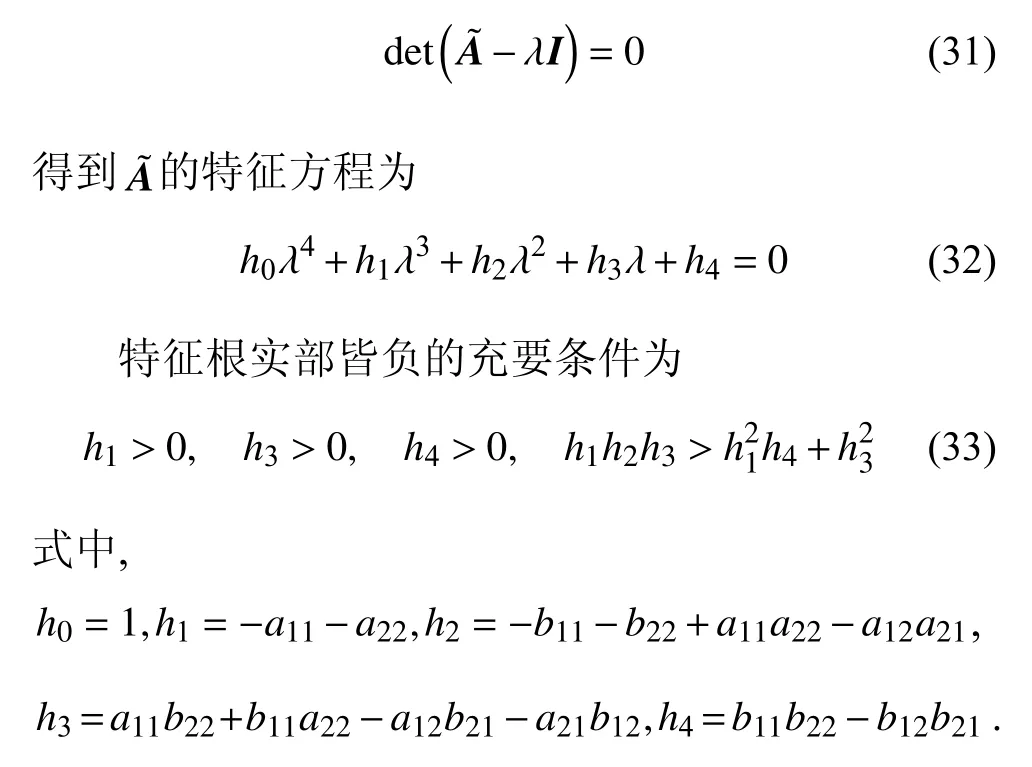
將式(34)代入hi,i=1,2,3,4,由式(33)導出無控飛行時,特征根實部皆負的充要條件為
由于第3 式一定成立,且第1 式和第4 式成立時第2 式也成立,故可以將式(35)簡化為
沿襲常規旋轉彈穩定性理論,改寫得到固定鴨舵雙旋彈無控飛行時的動態穩定性判據為
2.2.2 有控飛行時的動態穩定性判據
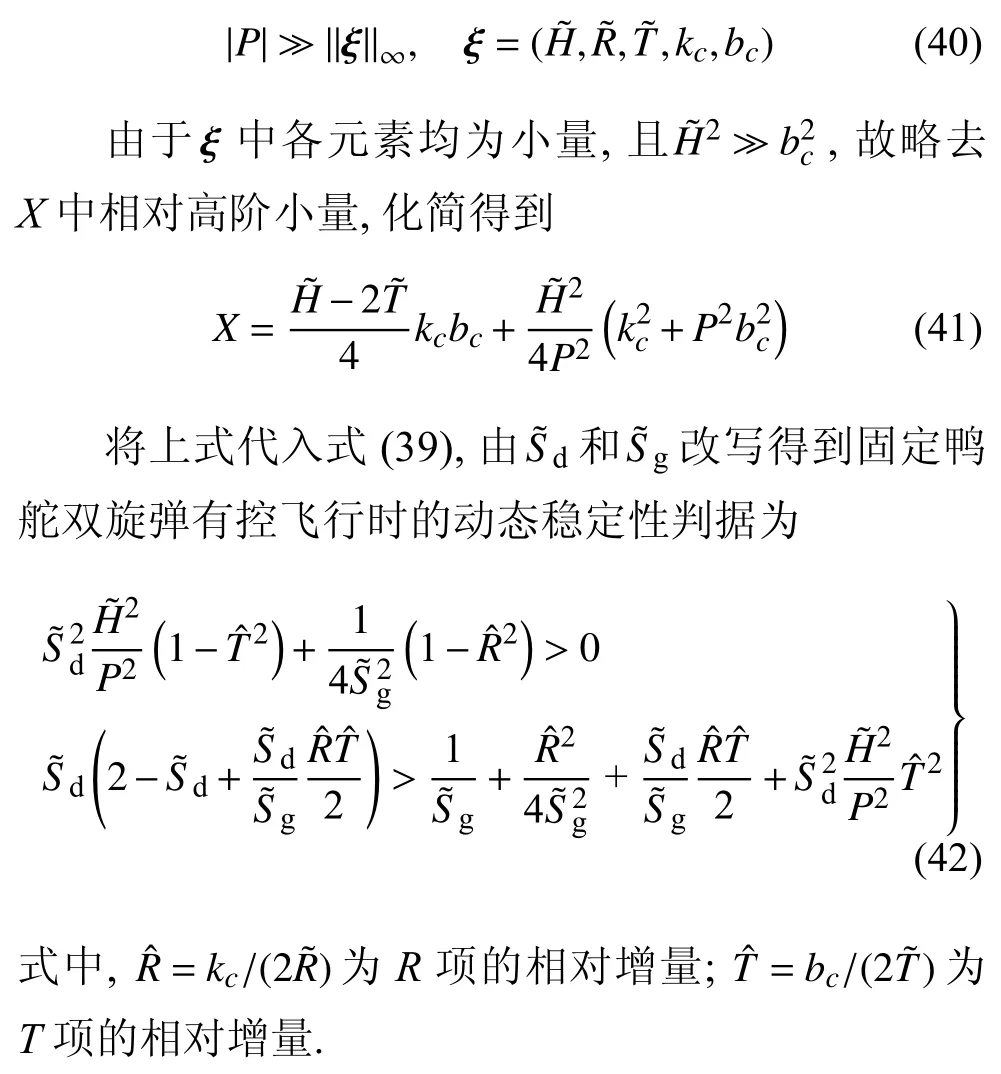
將上式代入式(33),在滿足無控飛行時動態穩定性判據的基礎上,進一步考慮前體滾轉角運動狀態改變對彈丸動態特性的影響,導出有控飛行時特征根實部皆負的充要條件為
依據外彈道學理論,旋轉穩定彈的陀螺力矩項遠大于靜力矩項和赤道阻尼力矩項,重力項、升力項、阻力項和馬格努斯力矩項更小[31],所以在控制力和力矩較小的條件下滿足關系式
2.3 舵面參數對動態穩定性的影響
為便于分析舵面參數對動態穩定性的影響,假設加裝修正組件不改變后體氣動參數,在此補充原常規旋轉穩定彈(后文簡稱原彈)的動態穩定性判據為
式中,Sd=2T/H,Sg=P2/(4R),分別為原彈的動態穩定因子和陀螺穩定因子,對應的動態穩定邊界如圖2 所示.
圖2 動態穩定邊界圖Fig.2 Dynamic stable boundary
式中,不等式左邊趨于 0+時,| 1-| 的最小取值須快速增大;不等式左邊小于0,且絕對值逐漸增大時,|1-|的 最大取值須快速趨近于0.易見,當使不等式左邊趨于0 時,要求的邊界取值快速變化,這可能導致操縱舵的安裝位置超出前體結構限制,故不宜接近某一界限值,該值由彈體氣動參數和結構允許的L取值限度綜合確定.
在滿足無控飛行時動態穩定性條件的基礎上,進一步分析舵面參數對固定鴨舵雙旋彈有控飛行時動態穩定性的影響,根據式(42)導出氣動參數相對增量還須滿足關系式
3 彈道數值計算分析
3.1 計算條件
本節以某155 mm 固定鴨舵雙旋彈為研究對象,在炮兵標準氣象條件下進行彈道數值計算分析.彈丸主要物理參數如表1 所示,仿真初始條件為:初速930 m/s,初始轉速300 r/s,射角45°,其余彈道參數為0.為便于分析,給出原彈的Sd和1 /Sg如圖3 所示,操縱舵的控制力系數導數如圖4 所示.

表1 彈丸物理參數Table 1 Physical parameters of projectile
圖3 原彈的穩定因子Fig.3 The stability factors of the original projectile
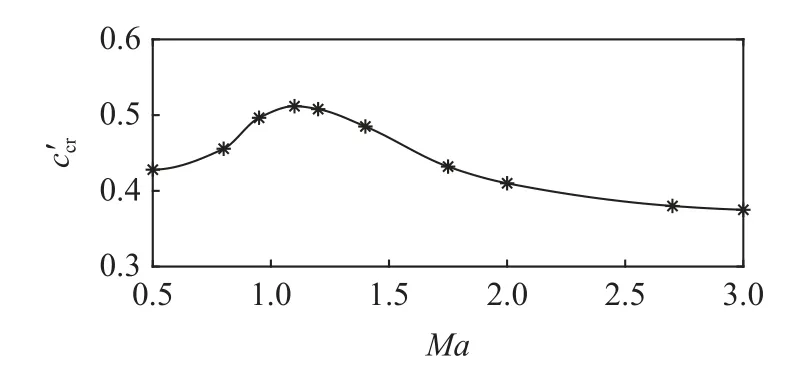
圖4 操縱舵的控制力系數導數Fig.4 Derivative of control force coefficient on control canard
3.2 計算結果分析
為了驗證固定鴨舵雙旋彈無控飛行時的動態穩定性判據和式(45)的舵面參數約束條件合理可行,首先給出彈道初始段,即t=10 s 時的H~ R相對增量邊界曲線如圖5 所示,其中動態穩定域包括:中間邊界曲線以下、兩側邊界曲線以下且在=1 軸以上.依據本節的操縱舵參數圖5 還給出了H~ R相對增量全彈道運動曲線,其始終在動態穩定域內,表明該彈在彈道初始段滿足無控飛行時的動態穩定性條件.
進一步分析無控飛行時全彈道的動態穩定性,依據Sd<1 和1 /Sg>0,由式(45)可知,其他彈道點上的H~ R相對增量邊界曲線與圖5 類似,只不過Sd減小或1 /Sg增大會使中間部分的邊界曲線收縮,故由圖3 可知H~ R相對增量運動曲線相對容易超出彈道末段的邊界曲線.圖6 給出彈道末段,即t=90 s 時的H~ R相對增量邊界曲線,易見H~ R相對增量運動曲線靠近邊界曲線,但仍位于動態穩定域內,表明該彈滿足無控飛行時的動態穩定性條件.
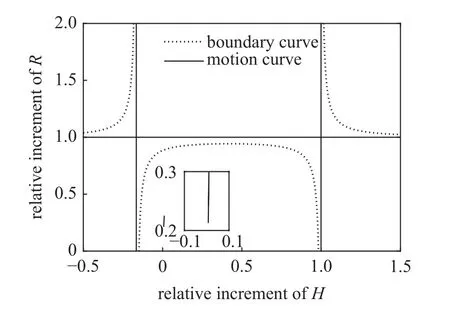
圖5 H~ R 相對增量邊界曲線(t=10 s)Fig.5 H-R relative incremental boundary (t=10 s)
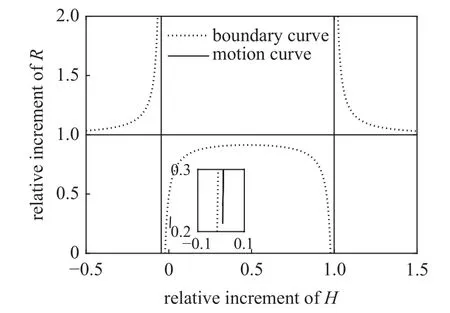
圖6 H~ R 相對增量邊界曲線(t=90 s)Fig.6 H-R relative incremental boundary (t=90 s)
利用本節給出的計算條件進行彈道仿真,在炮口和彈道頂點處各施加3°的初始擾動,圖7 為無控飛行時復攻角的幅值變化曲線.結果表明:①復攻角的幅值在初始擾動作用后逐漸收斂,故該彈無控飛行時動態穩定,驗證了固定鴨舵雙旋彈無控飛行時的動態穩定性判據和舵面參數約束條件合理可行;②炮口擾動在彈道初始段已逐漸收斂,對彈道頂點附近起控后的復攻角運動影響不大,為后文在零初始條件下分析有控飛行的動態穩定性提供了依據.
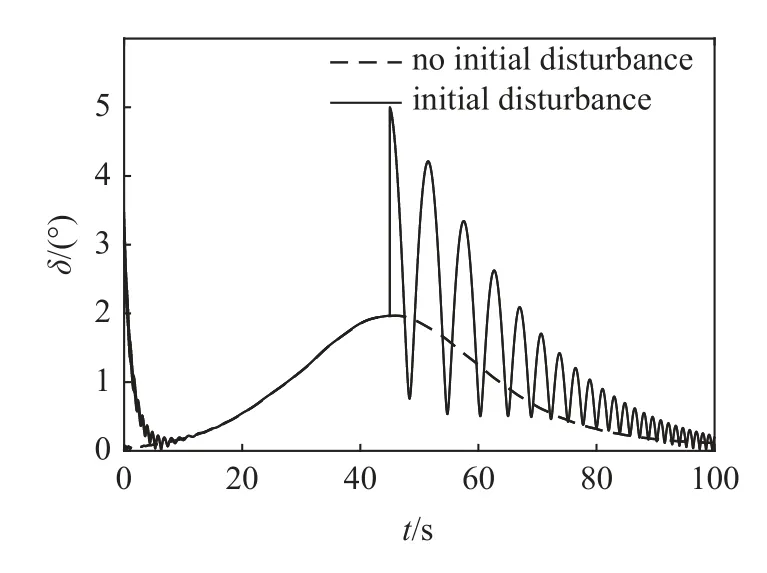
圖7 無控飛行時復攻角的幅值變化曲線Fig.7 Amplitude of complex attack angle in uncontrolled flight
在滿足無控飛行時動態穩定性條件的基礎上,進一步驗證有控飛行時的動態穩定性判據和舵面參數約束條件合理可行.結合圖3 給出的Sd和1 /Sg取值范圍分析式(46)可知,Sd減小和1 /Sg增大對動態穩定域的橢圓邊界影響不大,但會使雙曲線邊界靠近原點,可能導致T~ R相對增量的取值范圍縮小,故T~ R相對增量運動曲線相對容易超出彈道末段的邊界曲線.圖8 為彈道末段,即t=90 s 時的T~ R相對增量邊界曲線,易見T~ R相對增量運動曲線始終在動態穩定域內并遠離邊界曲線,故該彈在全彈道任意時刻均滿足有控飛行時的動態穩定性條件.
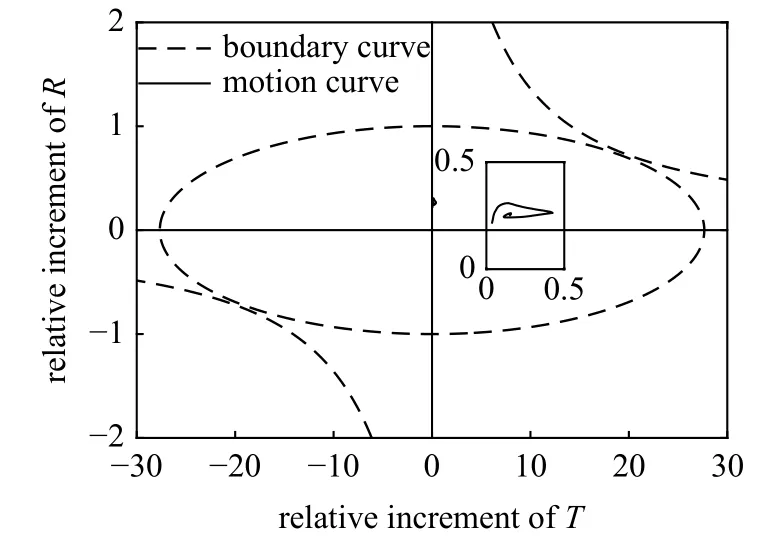
圖8 T~ R 相對增量邊界曲線(t=90 s)Fig.8 T-R relative incremental boundary (t=90 s)
利用本節給出的計算條件進行彈道仿真,假設固定鴨舵雙旋彈在彈道頂點附近,即t=45 s 時起控,圖9 給出了前體滾轉角控制方位分別為0°,90°,180°和270°時的復攻角運動曲線.結合式(28)可知,固定方位的控制力和力矩會產生控制平衡角,其與重力產生的動力平衡角共同構成復攻角的強迫角運動,并在起控瞬間引起與控制平衡角幅值相等、相位相反的初始擾動,使復攻角以強迫角運動為中心做逐漸收斂的自由角運動,表明該彈有控飛行時動態穩定,驗證了固定鴨舵雙旋彈有控飛行時的動態穩定性判據和舵面參數約束條件合理可行.
依據式(28),在零初始條件下對包含固定方位控制力和力矩非齊次項的復攻角方程進行求解,得到控制平衡角的表達式為

式中,φF=arctan(Pbc/kc)+arctan(-PT/R) .對于本節研究的固定鴨舵雙旋彈,滿足 0 <Pbc?N和 0 <PT?R,故,且 φF為一較小角度,即 ΔF的幅值主要由和 δD決定,相位與 γF相差約180°.結合圖7 可知,當動力平衡角在彈道末段接近零時,圖9中不同控制方位下的強迫角運動主要由 ΔF決定,其幅值近似相等,相位與前體滾轉角控制方位相差約180°,驗證了上述結論合理,為分析多次起控時的動態穩定性提供了理論依據.
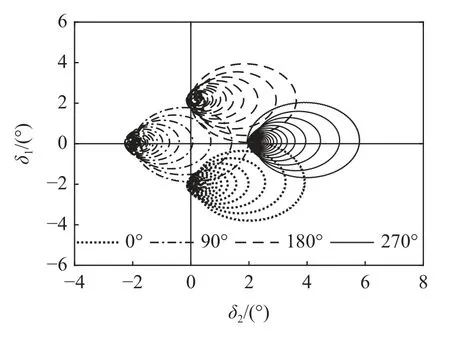
圖9 不同控制方位下的復攻角運動曲線Fig.9 Complex attack angle motion under different control directions
將控制周期設為15 s,圖10 給出了多次起控,前體滾轉角控制方位依次為0°,90°,180°和270°時的復攻角運動曲線.結合式(47)可知,前體滾轉角控制方位切換會使 ΔF的相位變為與切換后的 γF相差約180°,這會導致復攻角的強迫角運動發生變化,并在切換瞬間引起初始擾動,使復攻角以當前強迫角運動為中心做逐漸收斂的自由角運動.注意到在自由角運動未能收斂的條件下,復攻角的強迫角運動多次變化容易使初始擾動幅值偏大,可能導致 δ 超出某一界限,因此為了保證彈丸具有良好的動態穩定性,還須對前體滾轉角控制方位切換時強迫角運動的變化量幅值 δr進行限制.
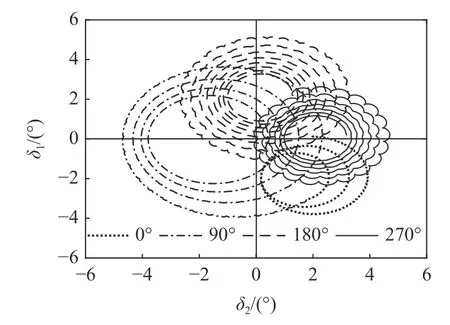
圖10 控制方位多次切換的復攻角運動曲線Fig.10 Complex attack angle motion with multiple switching of control directions
由于多次起控時強迫角運動變化量幅值主要由復控制平衡角的變化引起,所以為了使 δr不會過大,首先需要對 | ΔF| 進 行限制.定義 δmax為復控制平衡角的幅值允許限,須滿足
4 結論
本文通過建立復攻角的狀態空間模型,利用常規旋轉彈的穩定性分析方法,對固定鴨舵雙旋彈全彈道的動態穩定性問題展開研究,所得主要結論如下.
(1)由于前體滾轉角的運動特性在不同飛行狀態下存在差異,為了保證固定鴨舵雙旋彈全彈道飛行穩定,須同時滿足無控飛行和有控飛行時的動態穩定性判據.
(2)建立的固定鴨舵雙旋彈動態穩定性判據與常規旋轉彈的形式相似,無控飛行時只是在升力和靜力矩項中對應增加了舵面控制力和力矩項;有控飛行時進一步增加了有關項相對增量的影響.
(3)在原彈氣動參數確定時,為使安裝彈道修正組件后的固定鴨舵雙旋彈全彈道飛行動態穩定,需使落在由Sd和1 /Sg確定的H~ R相對增量邊界曲線內,且位于由確定的T~ R相對增量邊界曲線內,據此可以對操縱舵的形狀、尺寸和安裝位置等參數進行設計.
(4)對彈道進行多次控制,在自由角運動尚未收斂時,各控制周期的復控制平衡角相互干擾,容易使δ過大,導致彈丸飛行穩定性變差,據此需對 δD進行限制,并盡量避免 γF切換幅度過大.
考慮對彈道進行多次控制時容易使 δ 過大,可能導致在原有小攻角假設下分析的穩定性判據等結果不再準確,因此下一步擬通過建立固定鴨舵雙旋彈的非線性角運動模型,對其大攻角下的角運動特性和穩定性理論展開研究.