城市軌道交通車載軌道動態幾何檢測研究
2022-06-16 05:58:54郭雪張井玉尹昱淞盧波
新型工業化 2022年4期
郭雪,張井玉,尹昱淞,盧波
中車唐山機車車輛有限公司,河北唐山,064099
0 引言
測試人員在某線路進行了軌道幾何參數測試。試驗主要內容為試驗線軌道幾何參數測試。本報告內容主要是對檢測系統進行現場試驗驗證,驗證的主要內容是對檢測參數的重復性及準確性進行驗證。精度驗證主要是驗證各測量項目與實際的偏離程度,重復性主要是指檢測系統自身的穩定性。
1 實驗設備
1.1 設備功能介紹
軌道幾何參數檢測系統(以下簡稱:軌檢系統)主要檢測項目包括:鋼軌斷面測量、軌距、左右軌向、左右高低、水平、三角坑、曲率、鋼軌垂直以及側面磨耗等。軌道幾何狀態實時監控系統實現對軌道線路水平、曲線、高低及里程等技術參數的實時檢測。在現有的軌道檢測設備基礎上,本系統采用數字激光技術、光電測量技術、陀螺平臺、數字濾波以及高速計算機實時數據處理等新技術,對軌道狀態實施動態檢測,并且具有高速、可靠、精確高的特點[1]。
檢測車可以在隧道、地面上、高架線路上運行,車體和所有外部安裝的設備均能全天候不間斷地工作。
1.2 設備性能
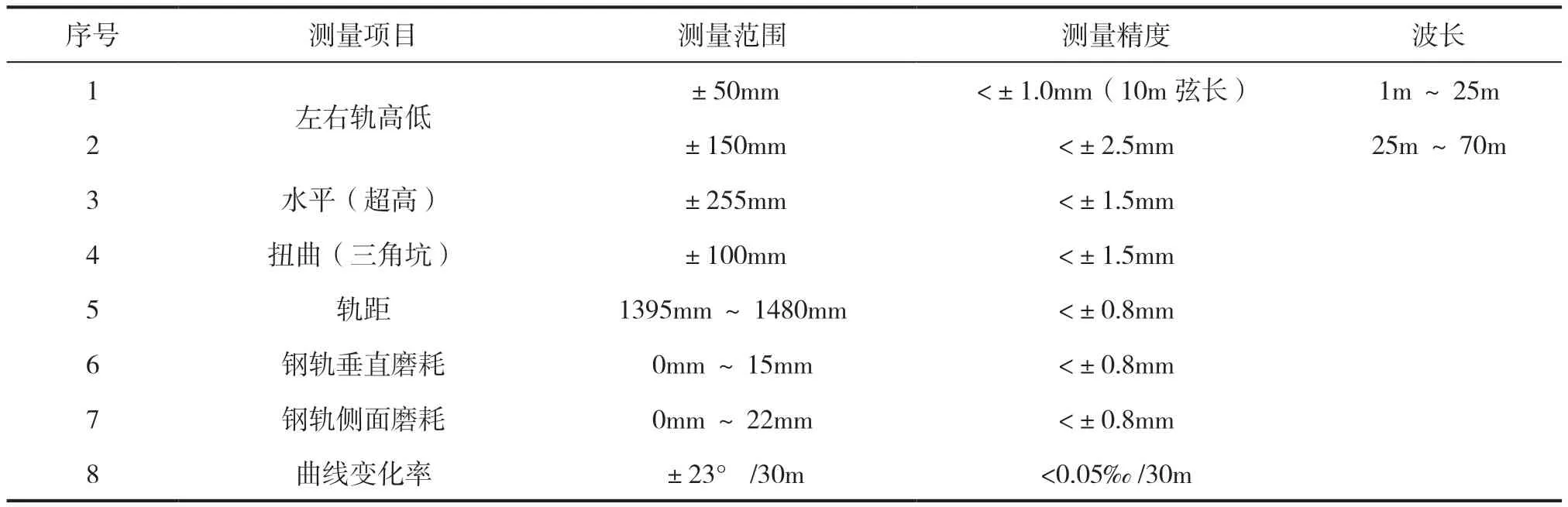
表1 軌道檢測系統電氣架構圖
2 軌道檢測試驗驗證及評價方法
將研究的軌檢設備集成在電客車輛上,通過現場實際線路試驗,驗證檢測系統各參數的檢測性能。主要是對軌距、高低、水平、三角坑參數進行驗證。以下是對各參數驗證方法描述。
(1)軌距試驗驗證
①在試驗段線路上選取指定線路區段,用軌檢系統多次測量動態運行檢測,取多次測量的軌距值進行對比誤差的統計分析,通過計算誤差的95%置信區間評估該參數的檢測系統穩定性能。
②在該區段,用標準軌檢儀對線路進行檢測。得到軌距靜態測量值,通過對比分析軌檢儀所測量的軌距值,計算軌檢系統和軌檢儀分別測量的軌距差值,統計分析95%置信區間。
③統計誤差的95%置信區間在精度要求范圍內,即驗證了該參數檢測的準確性。
(2)高低試驗驗證
高低測量采用慣性基準測量原理,本系統采用了10m波長輸出高低不平順波形。
①在試驗段線路上選取指定線路區段,用軌檢系統多次測量動態運行檢測,取多次測量的高低值進行對比誤差的統計分析,通過計算誤差的95%置信區間評估該參數的檢測系統穩定性能。
②在該區段,用標準軌檢儀對線路進行檢測。得到線路高低參數靜態測量值,通過對比分析軌檢儀所測量的高低值,計算軌檢系統和軌檢儀分別測量的高低差值,統計分析95%置信區間[2]。
③統計誤差的95%置信區間在精度要求范圍內,即驗證了該參數檢測的準確性。
(3)水平試驗驗證
①在試驗段線路上選取指定線路區段,用軌檢系統多次測量動態運行檢測,取多次測量的水平值進行對比誤差的統計分析,通過計算誤差的95%置信區間評估該參數的檢測系統穩定性能。
②在該區段,用標準軌檢儀對線路進行檢測。得到線路水平參數靜態測量值,通過對比分析軌檢儀所測量的水平值,計算軌檢系統和軌檢儀分別測量的水平差值,統計分析95%置信區間。
③統計誤差的95%置信區間在精度要求范圍內,即驗證了該參數檢測的準確性[3]。
(4)三角坑試驗驗證
①在試驗段線路上選取指定線路區段,用軌檢系統多次測量動態運行檢測,取多次測量的三角坑值進行對比誤差的統計分析,通過計算誤差的95%置信區間評估該參數的檢測系統穩定性能。
② 在該區段,用標準軌檢儀對線路進行檢測。得到線路三角坑參數靜態測量值,通過對比分析軌檢儀所測量的三角坑值,計算軌檢系統和軌檢儀分別測量的三角坑差值,統計分析95%置信區間。
③統計誤差的95%置信區間在精度要求范圍內,即驗證了該參數檢測的準確性[4]。
3 結果驗證分析
3.1 重復性驗證
選取線路上500米區間范圍內3次跑車動態檢測數據進行數據重復性對比分析。通過計算各參數每兩組數據之間的差值,對差值分布統計95%置信區間[5]。
從上表中軌距、高低、水平、三角坑的三次測量對比結果得知,95%置信區間均小于精度范圍要求,該檢測系統具有很好的重復性,系統在不同檢測工況下具有很好的穩定性。另外,還需要指出的是,受簡支梁豎向撓曲所產生的影響,軌道高低不平順波形呈現出明顯的周期性特征,并且周期性波長一致于簡支梁跨度;對此,通過將簡支梁豎向剛度增大,或者是將簡支梁跨度予以減少,都有助于對由于橋梁豎向撓曲所造成的周期性軌道高低不平順情況的有效控制,最終促進軌道高低平順狀態的提升。
3.2 精度驗證
在試車線K0+3~K3+0區間用軌檢小車采集的軌道數據作為標準進行軌檢系統檢測精度驗證[6]。
對比結果如下:
(1) 軌距
該區段的動靜態檢測數據差值的95%置信區間為[-1.1139,0.6303]mm
(2)左高低

表2 各參數每兩組數據之間的差值的 95%置信區間統計對比分析
該區段的動靜態檢測數據差值的95%置信區間為[-2.0940,2.0734]mm
(3)右高低
(4)水平
該區段的動靜態檢測數據差值的95%置信區間為[-1.7066,1.3456]mm
誤差分析:與軌檢儀數據對比差異較大位置主要分布在線路曲線段。但在誤差較大的地方可以看到具有一致的波形趨勢(波峰波谷一致對應)[7]。
(5) 三角坑
該區段的動靜態檢測數據差值的95%置信區間為[-1.3973,1.4105]mm
3.3 結果分析及結論
3.3.1 重復性和精度的結果分析
(1)針對重復性對比,誤差來源主要是定位誤差,導致曲線不能很好地整段對齊。
(2)針對精度驗證:由于線路是有碴道床,具有動靜態測量值的差異。一般存在動態測量值較軌檢儀數據偏大的特性。
(3)對比動靜態曲線,曲線包含的頻率成分及峰值大小均符合理論分析:包含頻率成分一樣,動態值大于靜態值。
3.3.2 重復性及精度驗證結論
(1)系統重復性較好,驗證系統測量結果具有較高的穩定性。
(2)動態值大于靜態值,且包含軌道頻率成分一樣,驗證動態軌檢系統數據滿足測量精度要求[8]。
4 試驗驗證結論
綜上所述,通過在線路上跑車試驗,驗證了檢測系統對檢測結果具有很好的重復性,系統穩定可靠;在試車線通過系統結果與軌檢儀數據對比分析,驗證了檢測系統的有效性,檢測結果滿足精度要求。需要強調的是,城市軌道交通軌道工程在實際驗收過程中,有必要對城市軌道交通車載軌道進行實車動態驗收,從中不僅能夠發現軌道不平順及不良區段,為軌道不平順狀態的精調提供指導,而且還能發現軌道的高低、水平情況對橋梁撓曲的影響情況,從而為運營期間軌道日常養護、維修等提供便利,因此,做好城市軌道交通車載軌道的動態幾何檢測工作,尤為必要且重要。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
