面向電力系統(tǒng)靈活性的電動(dòng)汽車(chē)控制策略
2022-06-16 10:27:46姚一鳴趙溶生李春燕燕智超謝開(kāi)貴
電工技術(shù)學(xué)報(bào) 2022年11期
關(guān)鍵詞:控制策略
姚一鳴 趙溶生 李春燕 燕智超 謝開(kāi)貴
(1.輸配電裝備及系統(tǒng)安全與新技術(shù)國(guó)家重點(diǎn)實(shí)驗(yàn)室(重慶大學(xué))重慶 400044 2.中國(guó)長(zhǎng)江電力股份有限公司 宜昌 443133)
0 引言
隨著碳中和目標(biāo)的推進(jìn),我國(guó)可再生能源占比將逐年攀升。據(jù)估計(jì),到2040 年,我國(guó)光伏裝機(jī)量將增加16 倍、風(fēng)電裝機(jī)量將增加9 倍[1]。屆時(shí),我國(guó)電力系統(tǒng)中非水可再生能源的發(fā)電比例將高達(dá)30%[2]。可再生能源具有波動(dòng)性和不確定性,其大量并網(wǎng)將給電力系統(tǒng)靈活性帶來(lái)嚴(yán)峻挑戰(zhàn)。“電力系統(tǒng)靈活性”指電力系統(tǒng)供需兩側(cè)響應(yīng)系統(tǒng)不確定性變化的能力[3],主要體現(xiàn)在調(diào)度運(yùn)行環(huán)節(jié),是衡量電力系統(tǒng)運(yùn)行性能的重要指標(biāo)之一[4]。電力系統(tǒng)靈活性不足將導(dǎo)致棄風(fēng)和削負(fù)荷事件,嚴(yán)重威脅系統(tǒng)的經(jīng)濟(jì)安全運(yùn)行。充裕的靈活性資源有助于緩解甚至消除可再生能源并網(wǎng)帶來(lái)的負(fù)面影響,對(duì)于能源的可持續(xù)發(fā)展具有十分重要的意義。
電動(dòng)汽車(chē)(Electric Vehicle,EV)作為一種新型交通工具,并網(wǎng)量逐年增加。預(yù)計(jì)到2030 年,電動(dòng)汽車(chē)電池總?cè)萘繉⑦_(dá)57 億kW·h,約為全網(wǎng)用電量的 1/3[5]。電動(dòng)汽車(chē)是電力系統(tǒng)中的重要用電負(fù)荷,其可通過(guò)充放電控制調(diào)整自身負(fù)荷曲線,具有平抑可再生能源波動(dòng)、提升系統(tǒng)靈活性的巨大潛力。
現(xiàn)階段已有大量文獻(xiàn)對(duì)電動(dòng)汽車(chē)的充放電控制策略及其與可再生能源的協(xié)調(diào)調(diào)度進(jìn)行研究。文獻(xiàn)[6-13]以滿足車(chē)主收益最大化需求或電力系統(tǒng)調(diào)度成本最低為目標(biāo),對(duì)電動(dòng)汽車(chē)的充放電行為進(jìn)行了詳細(xì)的建模優(yōu)化,但未考慮高比例可再生能源并網(wǎng)對(duì)電動(dòng)汽車(chē)調(diào)度策略的影響。電動(dòng)汽車(chē)與可再生能源協(xié)調(diào)調(diào)度的相關(guān)研究中,文獻(xiàn)[14-18]基于日前風(fēng)電、光伏的出力預(yù)測(cè)曲線,通過(guò)對(duì)電動(dòng)汽車(chē)的充電價(jià)格進(jìn)行優(yōu)化或提供激勵(lì),改變電動(dòng)汽車(chē)的充電負(fù)荷曲線,從而促進(jìn)可再生能源的消納。但可再生能源出力的實(shí)時(shí)波動(dòng)很大,根據(jù)預(yù)測(cè)值制定的電動(dòng)汽車(chē)控制策略難以應(yīng)對(duì)電力系統(tǒng)實(shí)時(shí)運(yùn)行過(guò)程中的動(dòng)態(tài)靈活性需求。文獻(xiàn)[19-21]針對(duì)可再生能源出力的時(shí)變性,建立了充電站的實(shí)時(shí)功率調(diào)整機(jī)制,以修正日前預(yù)測(cè)產(chǎn)生的偏差,但只計(jì)及了整個(gè)充電站的負(fù)荷曲線控制,未考慮充電站內(nèi)不同電動(dòng)汽車(chē)個(gè)體的功率特征和可調(diào)度性,導(dǎo)致制定的負(fù)荷調(diào)整方案過(guò)于樂(lè)觀。文獻(xiàn)[22-24]根據(jù)車(chē)主的偏好及出行計(jì)劃提出了電動(dòng)汽車(chē)有序充放電控制方案,在保障車(chē)主充電需求的同時(shí)盡可能滿足電力系統(tǒng)調(diào)度指令,減少棄風(fēng)棄光量,但其通過(guò)可再生能源實(shí)際出力與預(yù)測(cè)值的偏差來(lái)確定電動(dòng)汽車(chē)的充放電控制量,無(wú)法全面刻畫(huà)系統(tǒng)的靈活性需求。電力系統(tǒng)的靈活性需求是動(dòng)態(tài)變化的,其大小取決于系統(tǒng)的運(yùn)行策略,需考慮源、網(wǎng)、荷的交互影響,無(wú)法由可再生能源的出力波動(dòng)量直接獲取。
現(xiàn)階段國(guó)內(nèi)外對(duì)面向電力系統(tǒng)靈活性的電動(dòng)汽車(chē)充放電控制研究仍屬空白。電力系統(tǒng)靈活性匱乏是導(dǎo)致可再生能源消納率低的主要原因[25],傳統(tǒng)的電動(dòng)汽車(chē)充放電控制策略沒(méi)有計(jì)及系統(tǒng)的動(dòng)態(tài)靈活性需求,阻礙了電動(dòng)汽車(chē)靈活性調(diào)節(jié)潛力的充分挖掘,影響了可再生能源的消納效果。鑒于此,本文對(duì)面向電力系統(tǒng)靈活性的電動(dòng)汽車(chē)控制策略進(jìn)行研究。提出電力系統(tǒng)和電動(dòng)汽車(chē)的靈活性定義。設(shè)計(jì)了電動(dòng)汽車(chē)靈活性調(diào)度方案:各充電站對(duì)其能提供的最大靈活性進(jìn)行評(píng)估;電力系統(tǒng)調(diào)度中心根據(jù)各充電站上報(bào)的最大靈活性信息,對(duì)系統(tǒng)的靈活性需求進(jìn)行計(jì)算,并向充電站發(fā)布靈活性調(diào)度指令;各充電站再對(duì)站內(nèi)電動(dòng)汽車(chē)進(jìn)行靈活性控制。通過(guò)電力系統(tǒng)調(diào)度中心、充電站和電動(dòng)汽車(chē)的實(shí)時(shí)信息交換互動(dòng),最大化地滿足系統(tǒng)的動(dòng)態(tài)靈活性需求。最后,通過(guò)算例測(cè)試驗(yàn)證了本文所提電動(dòng)汽車(chē)靈活性調(diào)度方案的有效性和優(yōu)越性。
1 靈活性定義
1.1 電力系統(tǒng)靈活性
本文將電力系統(tǒng)靈活性定義為“系統(tǒng)運(yùn)用自身資源稟賦應(yīng)對(duì)可再生能源變化的能力”。本文考慮的可再生能源類(lèi)型為風(fēng)電。靈活性具有方向,且需在一定時(shí)間尺度下描述。根據(jù)方向的不同,靈活性可分為兩類(lèi):向上靈活性和向下靈活性。向上(下)靈活性指風(fēng)電突然減小(增加)時(shí)系統(tǒng)最大能增加(減小)的凈出力功率。其中,凈出力功率指常規(guī)機(jī)組總發(fā)電功率和負(fù)荷總需求功率的差值。根據(jù)時(shí)間尺度的不同,靈活性可分為調(diào)頻靈活性(秒級(jí))、爬坡靈活性(分鐘級(jí))和調(diào)峰靈活性(小時(shí)級(jí))等。本文研究的靈活性時(shí)間尺度為15min,主要針對(duì)爬坡靈活性。隨著風(fēng)電滲透率的增加,充裕的電力系統(tǒng)靈活性變得越發(fā)重要。向上(向下)靈活性不足將導(dǎo)致切負(fù)荷(棄風(fēng))事件,嚴(yán)重威脅電力系統(tǒng)的經(jīng)濟(jì)安全運(yùn)行。
1.2 電動(dòng)汽車(chē)靈活性
本文將電動(dòng)汽車(chē)靈活性定義為“電動(dòng)汽車(chē)?yán)贸浞烹娍刂普{(diào)整自身用電負(fù)荷的能力”。電動(dòng)汽車(chē)所能提供的最大向上(向下)靈活性指其通過(guò)充放電控制最大能滿足的電力系統(tǒng)向上(向下)靈活性缺額。電動(dòng)汽車(chē)有G2V 和V2G 兩種控制模式。G2V控制是指電力系統(tǒng)通過(guò)調(diào)節(jié)并網(wǎng)后的電動(dòng)汽車(chē)各時(shí)刻充電功率的大小來(lái)改變負(fù)荷側(cè)總需求;V2G 控制是指與電網(wǎng)連接的電動(dòng)汽車(chē)從其電池中輸送功率給電網(wǎng)。電力系統(tǒng)向上靈活性不足時(shí),電動(dòng)汽車(chē)可通過(guò)G2V 控制減小充電功率或通過(guò)V2G 控制向電網(wǎng)放電;電力系統(tǒng)向下靈活性不足時(shí),電動(dòng)汽車(chē)可通過(guò)G2V 控制增加充電功率。合理的電動(dòng)汽車(chē)充放電控制有助于增強(qiáng)電力系統(tǒng)靈活性,減少或者避免棄風(fēng)、削負(fù)荷事件的發(fā)生。
2 靈活性調(diào)度方案
合理的電動(dòng)汽車(chē)靈活性調(diào)度方案在保證車(chē)主利益的同時(shí),也能提升電力系統(tǒng)的靈活性。本文設(shè)計(jì)的靈活性調(diào)度方案如圖1 所示。

圖1 靈活性調(diào)度方案 Fig.1 Flexibility dispatch scheme
概述如下:
1)最大可提供靈活性計(jì)算。各充電站對(duì)站內(nèi)的電動(dòng)汽車(chē)狀態(tài)進(jìn)行統(tǒng)計(jì),計(jì)算出下個(gè)時(shí)刻所能提供的最大向上、向下靈活性信息,并告知電力系統(tǒng)調(diào)度中心。
2)電力系統(tǒng)靈活性需求計(jì)算。電力系統(tǒng)調(diào)度中心根據(jù)各充電站上報(bào)的下個(gè)時(shí)刻可提供的最大靈活性信息,通過(guò)滾動(dòng)優(yōu)化的方法計(jì)算需要調(diào)度的靈活性資源,并向充電站發(fā)布靈活性調(diào)度指令。
3)電動(dòng)汽車(chē)靈活性控制。各充電站對(duì)站內(nèi)電動(dòng)汽車(chē)進(jìn)行靈活性控制,參與控制的電動(dòng)汽車(chē)車(chē)主根據(jù)實(shí)際調(diào)度情況獲得相應(yīng)的補(bǔ)貼。
3 數(shù)學(xué)建模
本部分將對(duì)靈活性調(diào)度方案中涉及的數(shù)學(xué)模型進(jìn)行描述。模型中功率以kW 為單位,電量以kW·h為單位。
3.1 最大可提供靈活性計(jì)算
3.1.1 電動(dòng)汽車(chē)模型
定義第v臺(tái)電動(dòng)汽車(chē)在t時(shí)刻的荷電狀態(tài)為SOCv,t,表達(dá)式為

式中,Ev,t和分別為電動(dòng)汽車(chē)的剩余電量和額定電量。
任一電動(dòng)汽車(chē)v進(jìn)入充電站后,充電站會(huì)告知車(chē)主參與電網(wǎng)靈活性控制的單位補(bǔ)貼價(jià)格τ(¥/kW·h)。車(chē)主結(jié)合自身行駛意愿等實(shí)際情況,給充電站提供如下信息:初始荷電狀態(tài),取車(chē)時(shí)間Cv,期望荷電狀態(tài),最低容忍荷電狀態(tài)和損失厭惡系數(shù)λv。初始荷電狀態(tài)是指電動(dòng)汽車(chē)到達(dá)充電站時(shí)的荷電狀態(tài)。取車(chē)時(shí)間經(jīng)轉(zhuǎn)換后以min 為單位,若2h 后取車(chē),則取車(chē)時(shí)間設(shè)置為120min。期望荷電狀態(tài)是指車(chē)主在取車(chē)時(shí)希望達(dá)到的荷電狀態(tài),需滿足式(2)的約束,其中,為電動(dòng)汽車(chē)v在t時(shí)刻的最大充電功率。由于參與靈活性控制會(huì)得到補(bǔ)貼,且車(chē)主今日的行駛意愿可能并不強(qiáng)烈,并不要求取車(chē)時(shí)電動(dòng)汽車(chē)達(dá)到期望荷電狀態(tài),故引入“最低容忍荷電狀態(tài)”的概念。最低容忍荷電狀態(tài)是指車(chē)主能承受的電動(dòng)汽車(chē)荷電狀態(tài)下限,其取值范圍約束如式(3)所示。其中,SOCmvin表示為了保障電動(dòng)汽車(chē)v電池健康及行駛需求所要求的最低電量。參與控制的車(chē)主在取車(chē)時(shí)獲得的補(bǔ)貼為。其中,是指取車(chē)時(shí)電動(dòng)汽車(chē)v的實(shí)際荷電狀態(tài),其值需滿足式(4)的約束。損失厭惡系數(shù)λv刻畫(huà)了車(chē)主在面對(duì)取車(chē)時(shí)實(shí)際荷電狀態(tài)與期望荷電狀態(tài)之間差距的滿意度,其取值范圍在本文中設(shè)定為[0,1]。當(dāng)λv=0時(shí),表示車(chē)主非常愿意參與電網(wǎng)的靈活性控制從而獲取補(bǔ)貼收益;當(dāng)λv=1時(shí),表示車(chē)主希望盡可能將電動(dòng)汽車(chē)充電至期望荷電狀態(tài),對(duì)于獲得補(bǔ)貼的敏感度很低。


3.1.2 電動(dòng)汽車(chē)狀態(tài)統(tǒng)計(jì)
假設(shè)某充電站h中停有輛電動(dòng)汽車(chē)。該充電站對(duì) 15min 后站內(nèi)所有電動(dòng)汽車(chē)的狀態(tài)進(jìn)行統(tǒng)計(jì),并計(jì)算屆時(shí)本充電站所能提供的最大向上(向下)靈活性。
對(duì)于電動(dòng)汽車(chē)v,充電站將求解目標(biāo)函數(shù)為式(5),約束式為式(6)~式(8)的優(yōu)化問(wèn)題以確定其15min 后的狀態(tài)。

式中,δ為懲罰因子;βv為期望荷電狀態(tài)與充電站最多能使電動(dòng)汽車(chē)達(dá)到的荷電狀態(tài)的差值;ρt為電價(jià)[¥/(kW·h)];為電動(dòng)汽車(chē)v在t時(shí)刻的充電功率;為當(dāng)前時(shí)刻;為取車(chē)時(shí)刻;為向下取整操作。本文t時(shí)刻和t+1 時(shí)刻的差距為15min。目標(biāo)函數(shù)式(5)由兩部分組成:第一部分為懲罰項(xiàng),旨在督促充電站盡可能在取車(chē)時(shí)間前使電動(dòng)汽車(chē)達(dá)到車(chē)主的期望荷電狀態(tài);第二部分表示充電站給電動(dòng)汽車(chē)充電的電費(fèi)成本。

約束式(7)和式(8)限制了βv和電動(dòng)汽車(chē)充電功率的范圍。
對(duì)所有電動(dòng)汽車(chē)并行求解上述優(yōu)化問(wèn)題,充電站將獲得各電動(dòng)汽車(chē)的計(jì)劃充電功率信息和荷電狀態(tài)。接下來(lái)充電站將計(jì)算其所能提供的最大向上(向下)靈活性。
3.1.3 最大可提供向上靈活性計(jì)算
電動(dòng)汽車(chē)的G2V 和V2G 模式均可用于提供向上靈活性資源。G2V 控制模式下,充電站可減少給電動(dòng)汽車(chē)的充電功率,以削減負(fù)荷需求。對(duì)于電動(dòng)汽車(chē)v,其在時(shí)刻最大能減少的充電功率可通過(guò)求解優(yōu)化問(wèn)題(9)獲得。
3.1.4 最大可提供向下靈活性計(jì)算
電動(dòng)汽車(chē)只有G2V 模式可用于提供向下靈活性資源。在G2V 控制模式下,充電站將按照最大充電功率給電動(dòng)汽車(chē)進(jìn)行充電,以增加負(fù)荷需求,充電站h在時(shí)刻使用G2V 控制所能提供的最大向 下靈活性。
3.2 電力系統(tǒng)靈活性需求計(jì)算
采用滾動(dòng)優(yōu)化方法[26]對(duì)電力系統(tǒng)的靈活性需求進(jìn)行建模,目標(biāo)函數(shù)為
式中,NG為火電機(jī)組總數(shù);Tpr為下一時(shí)段;T為總時(shí)段數(shù),本文時(shí)間尺度為15min,故共有96 個(gè)時(shí)段;a、b、c、cu、cd為火電機(jī)組的成本系數(shù);Pi,t為第i臺(tái)火電機(jī)組在t時(shí)刻的計(jì)劃出力功率;分別為火電機(jī)組的運(yùn)行/起動(dòng)/停機(jī)狀態(tài)(若運(yùn)行/起動(dòng)/停機(jī),則值為1;否則值為0),其值由日前機(jī)組組合計(jì)劃確定,在實(shí)時(shí)調(diào)度模型中作為輸入?yún)?shù);NW為風(fēng)電場(chǎng)總數(shù);NEB為除電動(dòng)汽車(chē)外的常規(guī)電負(fù)荷總數(shù);λ和μ分別為棄風(fēng)和切負(fù)荷的單位成本;和分別為計(jì)劃棄風(fēng)功率和切負(fù)荷功率。
式(12)~式(14)為機(jī)組出力約束。

棄風(fēng)和切負(fù)荷功率約束為
式中,ΩW為風(fēng)電場(chǎng)的集合。
線路潮流約束為

式中,PFn,m為線路傳輸容量的上限;ΨE為電力傳輸線路集合。式(19)限制了平衡節(jié)點(diǎn)處的相角θref,t為0。式(20)~式(23)限制了充電站充電負(fù)荷的取值范圍。

3.3 電動(dòng)汽車(chē)靈活性控制
3.3.1 車(chē)主滿意度排序
本文引入經(jīng)濟(jì)學(xué)中“損失厭惡(Loss aversion)”的概念來(lái)刻畫(huà)電動(dòng)汽車(chē)車(chē)主參與靈活性控制的積極性。人們?cè)诓煌h(huán)境下的決策行為并非完全理性,往往表現(xiàn)出對(duì)損失比對(duì)盈利更為敏感的現(xiàn)象,這種非理性決策行為就被稱為損失厭惡。使用文獻(xiàn)[27]中提出的模型對(duì)車(chē)主的損失厭惡心理進(jìn)行建模。

式中,gv為第v臺(tái)電動(dòng)汽車(chē)車(chē)主的心理滿意度,其取值范圍為[0,1],值越大代表車(chē)主越滿意。可根據(jù)gv值的大小對(duì)電動(dòng)汽車(chē)進(jìn)行優(yōu)先級(jí)排序,根據(jù)排序結(jié)果先后參與靈活性控制。詳細(xì)的靈活性控制計(jì)劃如下所述。
3.3.2 向上靈活性控制
若充電站h在t時(shí)刻需提供值為的向上靈活性,從保護(hù)電池的角度出發(fā),充電站將首先安排電動(dòng)汽車(chē)參與G2V 控制。G2V 控制策略如下:
1)將t時(shí)刻所有與電網(wǎng)連接的電動(dòng)汽車(chē)按照滿意度進(jìn)行降序排列,得到集合ΩG2Vmax,NG2Vmax為該集合的元素個(gè)數(shù)。
解得nG2V的值后,取集合ΩG2Vmax中前nG2V個(gè)元素構(gòu)成新集合ΩG2V,即為參與G2V 控制的電動(dòng)汽車(chē)集合。充電站將對(duì)集合ΩG2V中的前nG2V-1輛電動(dòng)汽車(chē)供給值為的功率,對(duì)第nG2V輛電動(dòng)汽車(chē)供給值為的功率。此時(shí)可以滿足電力系統(tǒng)調(diào)度中心分配的向上靈活性需求任務(wù)。
若G2V 控制不足以完成靈活性任務(wù),此時(shí)需啟用V2G 控制,策略如下:
1)將t時(shí)刻所有與電網(wǎng)連接的電動(dòng)汽車(chē)按照滿意度進(jìn)行降序排列,得到集合ΩV2Gmax,NV2Gmax為該集合的元素個(gè)數(shù)。
2)求解優(yōu)化模型

解得nV2G的值后,取集合ΩV2Gmax中的前nV2G個(gè)元素構(gòu)成一個(gè)新的集合ΩV2G,即為參與V2G 控制的電動(dòng)汽車(chē)集合,該集合中的前nV2G-1輛電動(dòng)汽車(chē)將向電網(wǎng)輸送值為的功率,第nV2G輛電動(dòng)汽車(chē)向電網(wǎng)輸送值為的功率。此時(shí)可以完全滿足向上靈活性需求任務(wù)。
3.3.3 向下靈活性控制
若充電站h在t時(shí)刻需提供值為的向下靈活性,充電站將安排電動(dòng)汽車(chē)參與G2V 控制。G2V控制策略如下:
1)將t時(shí)刻所有與電網(wǎng)連接的電動(dòng)汽車(chē)按照滿意度進(jìn)行升序排列,得到集合為該集合的元素個(gè)數(shù)。
2)求解優(yōu)化模型

4 算例分析
本節(jié)將設(shè)計(jì)算例來(lái)驗(yàn)證本文模型的優(yōu)勢(shì)和有效性。所有的算例測(cè)試都在8G 內(nèi)存,Intel(R) Core(TM) i7-7700 CPU @ 3.60GHz 的計(jì)算機(jī)上,使用Python 3.7 調(diào)用求解器Gurobi 9.0.1 完成。本文時(shí)間尺度為15min,實(shí)時(shí)調(diào)度過(guò)程中共有96 個(gè)時(shí)間段。
4.1 24 節(jié)點(diǎn)系統(tǒng)
首先,以24 節(jié)點(diǎn)電力系統(tǒng)為例對(duì)本文所提電動(dòng)汽車(chē)靈活性調(diào)度方案進(jìn)行詳細(xì)分析。電力網(wǎng)絡(luò)采用IEEE RTS-24 節(jié)點(diǎn)系統(tǒng)[28]進(jìn)行模擬,該系統(tǒng)中有17個(gè)負(fù)荷節(jié)點(diǎn),假設(shè)每個(gè)負(fù)荷節(jié)點(diǎn)都接有10 個(gè)電動(dòng)汽車(chē)充電站,整個(gè)系統(tǒng)需要滿足170 個(gè)充電站的電力需求。三個(gè)風(fēng)電場(chǎng)分別接在節(jié)點(diǎn)3、5 和20 處。考慮四種風(fēng)電場(chǎng)景(分別代表四個(gè)季節(jié)),風(fēng)電出力的預(yù)測(cè)值和實(shí)際值如附圖1~附圖4 所示。對(duì)應(yīng)于四個(gè)季節(jié)的常規(guī)電負(fù)荷場(chǎng)景如附圖5 所示。各充電站每時(shí)刻新增的電動(dòng)汽車(chē)數(shù)量滿足正態(tài)分布。抵達(dá)充電站的電動(dòng)汽車(chē)電池容量均設(shè)置為30kW·h,最大充放電功率為12kW,初始荷電狀態(tài)滿足在區(qū)間[0.2,1]上的均勻分布[7],電動(dòng)汽車(chē)的最低容忍荷電狀態(tài)設(shè)置為0.35[29],電動(dòng)汽車(chē)取車(chē)時(shí)間服從正態(tài)分布,參與電網(wǎng)靈活性控制的補(bǔ)貼為0.5¥/(kW·h),車(chē)主的損失厭惡系數(shù)服從在區(qū)間[0,1]上的均勻分布。
4.1.1 電力系統(tǒng)靈活性分析
為評(píng)估本文提出的電動(dòng)汽車(chē)控制策略對(duì)提升電力系統(tǒng)靈活性的作用,考慮如下兩種情況:①電動(dòng)汽車(chē)不參與靈活性控制;②電動(dòng)汽車(chē)參與靈活性控制。
在這兩種情況下,就四種不同的場(chǎng)景分別對(duì)電力系統(tǒng)的靈活性缺額進(jìn)行計(jì)算,結(jié)果見(jiàn)表1。
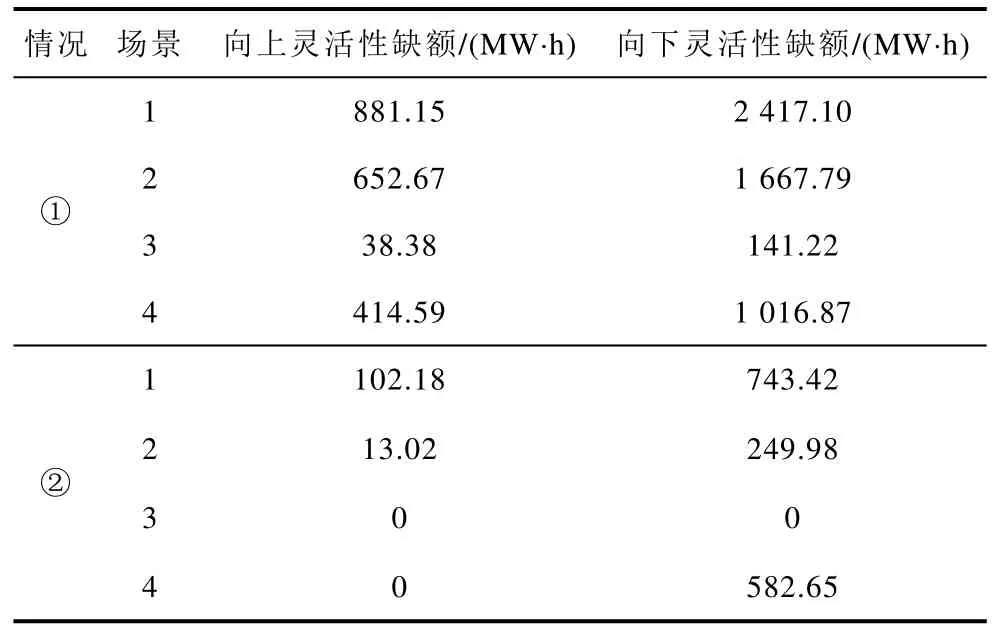
表1 24 節(jié)點(diǎn)系統(tǒng)靈活性缺額計(jì)算結(jié)果 Tab.1 Calculation results of the flexibility shortage in the 24-node power system
由表1 可見(jiàn),通過(guò)本文提出的電動(dòng)汽車(chē)靈活性控制策略,電力系統(tǒng)的向上靈活性缺額和向下靈活性缺額都大大減少。情況②的場(chǎng)景3 下,電力系統(tǒng)靈活性缺額為0,這主要是因?yàn)閳?chǎng)景3 的風(fēng)電資源較為匱乏,出力一直維持在較低的水平,其產(chǎn)生的波動(dòng)可被電動(dòng)汽車(chē)的充放電控制完全平抑。從表1中還注意到電力系統(tǒng)的向上靈活性缺額遠(yuǎn)小于向下靈活性缺額,這是因?yàn)殡妱?dòng)汽車(chē)可通過(guò)G2V 和V2G兩種控制模式提供向上靈活性資源,而向下靈活性資源只能由G2V 模式提供。情況②中電動(dòng)汽車(chē)參與G2V 控制和V2G 控制的能量見(jiàn)表2。

表2 G2V 和V2G 控制能量 Tab.2 G2V and V2G control energy
由表2 可知,電動(dòng)汽車(chē)參與G2V 控制的能量遠(yuǎn)大于參與V2G 控制的能量,這主要是由于G2V 模式既能提供向上靈活性的需求,又能提供向下靈活性的需求,且在應(yīng)對(duì)系統(tǒng)向上靈活性需求時(shí),G2V模式比V2G 模式有更高的優(yōu)先級(jí)。
電力系統(tǒng)調(diào)度中心可通過(guò)從電力市場(chǎng)中購(gòu)買(mǎi)輔助服務(wù)來(lái)滿足靈活性缺額。美國(guó)CAISO 市場(chǎng)2021年3 月8 日上調(diào)和下調(diào)備用的日前預(yù)測(cè)價(jià)格曲線[30]如圖2 所示。不同情況和場(chǎng)景下,為滿足靈活性需求而購(gòu)買(mǎi)輔助服務(wù)產(chǎn)生的費(fèi)用見(jiàn)表3。由表3 可知,通過(guò)電動(dòng)汽車(chē)的靈活性控制可大大降低電力系統(tǒng)的運(yùn)行成本,證明了本文所提電動(dòng)汽車(chē)控制策略的經(jīng)濟(jì)價(jià)值。
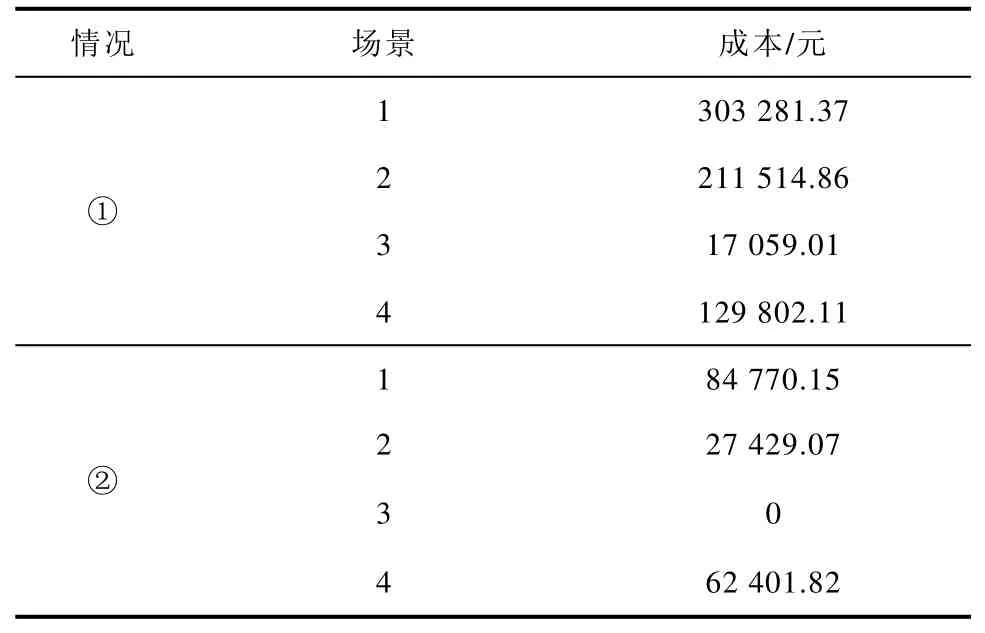
表3 購(gòu)買(mǎi)輔助服務(wù)費(fèi)用 Tab.3 Cost of purchasing auxiliary service
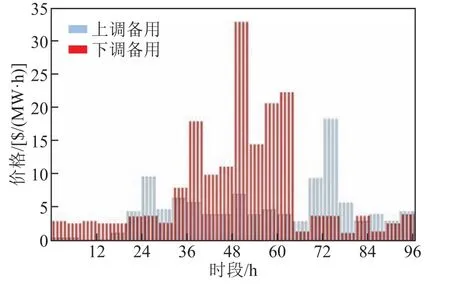
圖2 備用價(jià)格 Fig.2 Regulation prices
4.1.2 計(jì)算時(shí)間分析
本文研究的靈活性時(shí)間尺度為15min,因此電動(dòng)汽車(chē)的靈活性控制策略需在15min 內(nèi)完成制定。使用蒙特卡洛模擬法抽取四個(gè)場(chǎng)景下電動(dòng)汽車(chē)的狀態(tài)各1 000 次,即模擬4 000 天的電動(dòng)汽車(chē)靈活性 控制過(guò)程。圖3 給出了這4 000 天內(nèi)各時(shí)段充電站可提供靈活性、電力系統(tǒng)靈活性需求和電動(dòng)汽車(chē)靈活性控制計(jì)算所需最大時(shí)間。

圖3 24 節(jié)點(diǎn)系統(tǒng)計(jì)算時(shí)間 Fig.3 Computing time in the 24-node power system
由圖3 可知,本文所提模型的計(jì)算時(shí)間完全能夠滿足15min 的靈活性調(diào)度需求。充電站最大可提供靈活性計(jì)算和電動(dòng)汽車(chē)靈活性控制耗時(shí)均在0.2s內(nèi),這主要是因?yàn)橄鄳?yīng)的模型為線性規(guī)劃模型,時(shí)間復(fù)雜度很低。電力系統(tǒng)靈活性需求計(jì)算模型為二次規(guī)劃模型,故耗時(shí)略長(zhǎng),但也完全可以滿足實(shí)際需要。由此可見(jiàn)本文所提電動(dòng)汽車(chē)靈活性控制策略的實(shí)用性和有效性。
4.1.3 參數(shù)影響分析
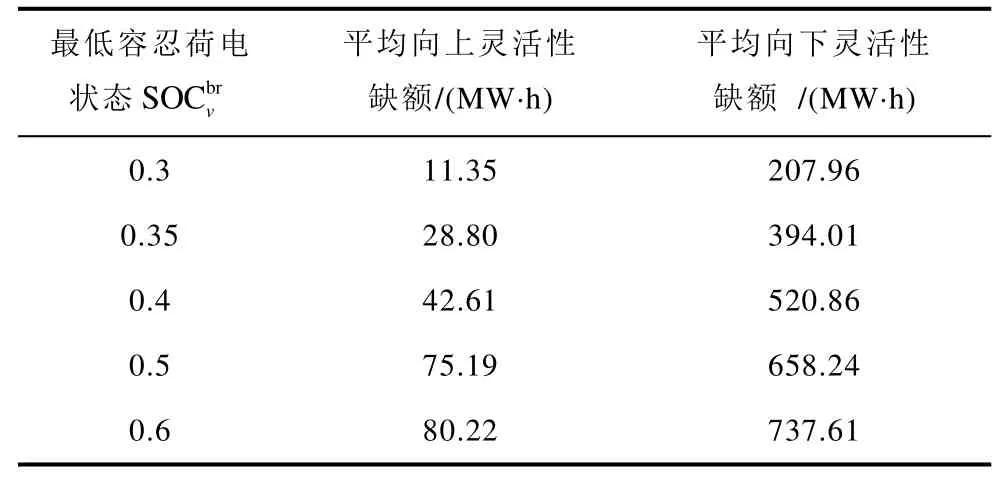
表4 最低容忍荷電狀態(tài)對(duì)靈活性的影響 Tab.4 Impact of the lowest tolerable SOC on the power system flexibility
4.2 實(shí)際系統(tǒng)
對(duì)中國(guó)西北某省的實(shí)際電力系統(tǒng)進(jìn)行測(cè)試,以進(jìn)一步證明本文所提方法在改善電力系統(tǒng)靈活性和計(jì)算時(shí)間上的巨大優(yōu)勢(shì)。該電力系統(tǒng)中含有93 個(gè)主要負(fù)荷節(jié)點(diǎn),假設(shè)每個(gè)負(fù)荷節(jié)點(diǎn)都接有30 個(gè)電動(dòng)汽車(chē)充電站,電動(dòng)汽車(chē)的參數(shù)設(shè)置與24 節(jié)點(diǎn)相同。使用K-means 聚類(lèi)算法生成四種典型風(fēng)電出力和負(fù)荷場(chǎng)景,考慮的兩種情況與4.1 節(jié)相同。不同情況和場(chǎng)景下的電力系統(tǒng)靈活性缺額計(jì)算結(jié)果見(jiàn)表5。由表5 可知,本文所提電動(dòng)汽車(chē)靈活性控制策略可分別降低向上和向下靈活性缺額約80%和60%,大大減少了棄風(fēng)和削負(fù)荷量。

表5 實(shí)際系統(tǒng)靈活性缺額計(jì)算結(jié)果 Tab.5 Calculation results of the flexibility shortage in the realistic power system
接下來(lái)對(duì)本文提出方法的計(jì)算時(shí)間進(jìn)行評(píng)估。與4.1 節(jié)相同,使用蒙特卡洛模擬法模擬4 000 天的電動(dòng)汽車(chē)靈活性控制過(guò)程。各時(shí)段充電站可提供靈活性、電力系統(tǒng)靈活性需求和電動(dòng)汽車(chē)靈活性控制計(jì)算所需最大時(shí)間如圖4 所示。由圖4 可知,本文所提電動(dòng)汽車(chē)靈活性控制方法的計(jì)算時(shí)間在秒級(jí),完全可以滿足實(shí)際需要。
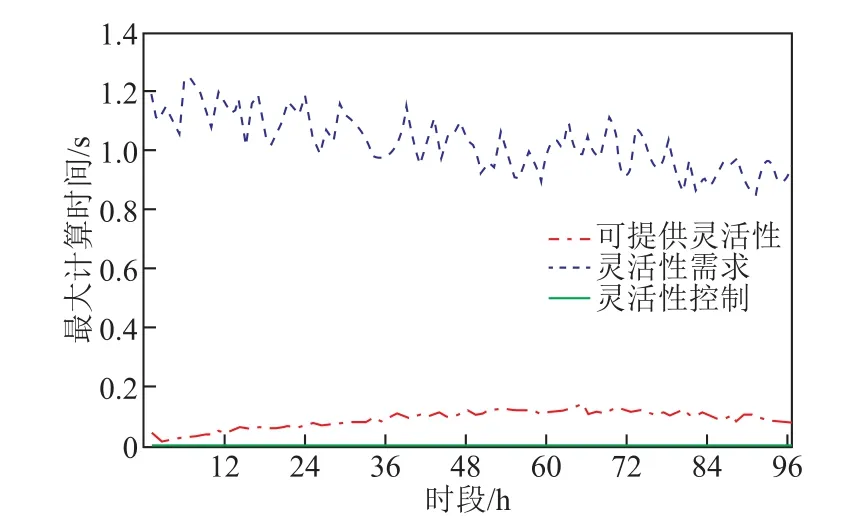
圖4 實(shí)際系統(tǒng)計(jì)算時(shí)間 Fig.4 Computing time in the realistic power system
5 結(jié)論
隨著碳中和目標(biāo)的不斷推進(jìn),如何提高電力系統(tǒng)靈活性以適應(yīng)可再生能源的實(shí)時(shí)波動(dòng),成為了亟須解決的問(wèn)題。電動(dòng)汽車(chē)作為一種新興的可變負(fù)荷,可通過(guò)合理的充放電控制緩解電力系統(tǒng)靈活性不足的問(wèn)題。本文從面向電力系統(tǒng)靈活性的電動(dòng)汽車(chē)實(shí)時(shí)調(diào)度角度出發(fā),研究了電動(dòng)汽車(chē)的靈活性控制策略,設(shè)計(jì)了“最大可提供靈活性計(jì)算-電力系統(tǒng)靈活性需求計(jì)算-電動(dòng)汽車(chē)靈活性控制”的靈活性調(diào)度方案。
基于各時(shí)刻充電站所能提供的最大靈活性計(jì)算結(jié)果,電力系統(tǒng)調(diào)度中心通過(guò)滾動(dòng)優(yōu)化的方法計(jì)算需要調(diào)度的靈活性資源,并向充電站發(fā)布靈活性調(diào)度指令,充電站進(jìn)而對(duì)站內(nèi)電動(dòng)汽車(chē)進(jìn)行靈活性控制。通過(guò)IEEE RTS-24 節(jié)點(diǎn)和實(shí)際電力系統(tǒng)算例測(cè)試,得出如下結(jié)論:本文所提的電動(dòng)汽車(chē)控制策略能極大緩解電力系統(tǒng)的靈活性缺額,有助于減少棄風(fēng)、削負(fù)荷量。另外,本文模型的求解時(shí)間為秒級(jí),完全可以滿足電力系統(tǒng)的實(shí)時(shí)靈活性調(diào)度需求,證明了模型的實(shí)用性和有效性。車(chē)主參與電網(wǎng)靈活性控制的單位補(bǔ)貼價(jià)格在本文中被假定為一個(gè)給定的常數(shù),該價(jià)格的制定需綜合考慮電網(wǎng)及車(chē)主的利益分配,其詳細(xì)的制定方案將是本文的下一步研究方向。
附 錄
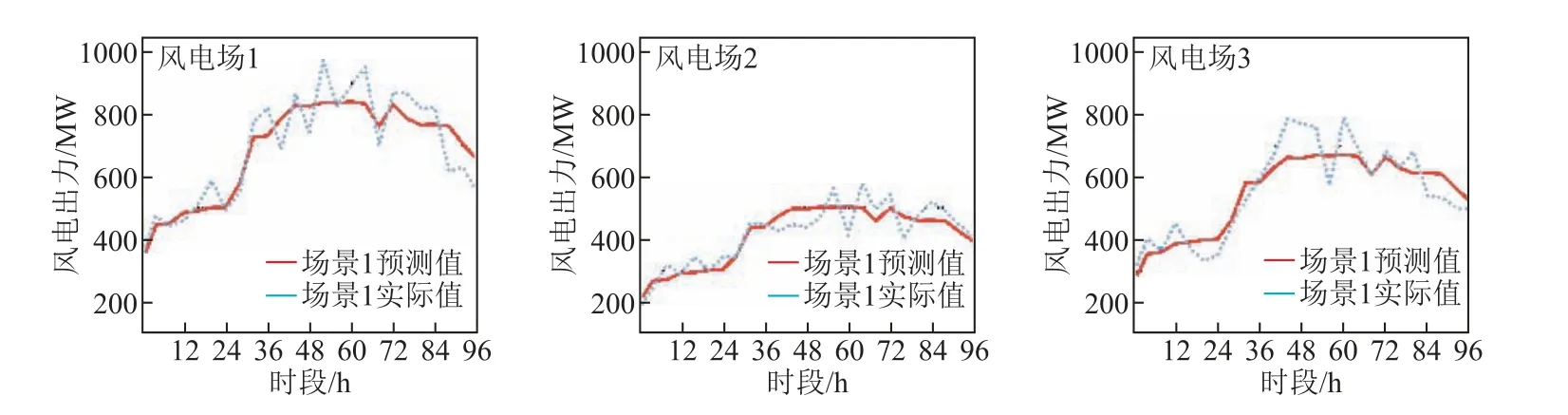
附圖1 場(chǎng)景1 下風(fēng)電場(chǎng)出力預(yù)測(cè)值和實(shí)際值 App.Fig.1 Forecast and actual value of wind farm output in Scenario 1

附圖2 場(chǎng)景2 下風(fēng)電場(chǎng)出力預(yù)測(cè)值和實(shí)際值 App.Fig.2 Forecast and actual value of wind farm output in Scenario 2

附圖3 場(chǎng)景3 下風(fēng)電場(chǎng)出力預(yù)測(cè)值和實(shí)際值 App.Fig.3 Forecast and actual value of wind farm output in Scenario 3
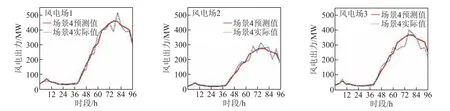
附圖4 場(chǎng)景4 下風(fēng)電場(chǎng)出力預(yù)測(cè)值和實(shí)際值 App.Fig.4 Forecast and actual value of wind farm output in Scenario 4

附圖5 常規(guī)電負(fù)荷預(yù)測(cè)值和實(shí)際值 App.Fig.5 Forecast and actual value of traditional electrical load
猜你喜歡
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:37
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測(cè)與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(shù)(2016年5期)2016-03-22 01:09:38
電機(jī)與控制應(yīng)用(2015年2期)2015-03-01 03:49:24
電測(cè)與儀表(2014年24期)2014-04-09 11:35:36
