基于車地和車車通信列車運行自動控制系統分析研究
2022-06-17 09:46:52崔軼昕
現代城市軌道交通 2022年6期
崔軼昕,劉 琴,趙 程,景 亮
(寧波市軌道交通集團有限公司,浙江寧波 315010)
傳統基于通信的列車控制系統(CBTC)采用車地通信實現車載設備與軌旁設備之間的信息交互,其自主決策和智能化水平較低,加之軌行區信號設備較多,建設和運營維護成本較高。為降低信號系統的建設和運營成本,提高信號系統的智能化水平,對傳統CBTC進行優化升級形成基于車車通信的列車控制系統,實現信號系統轉型升級。本文對傳統基于車地和車車通信列車運行系統技術進行分析研究,以探索列車運行控制系統的發展趨勢。
1 基于車地通信列車運行自動控制系統概述
1.1 車地通信列車運行自動控制系統組成
車地通信CBTC系統劃分為5層結構,即中央級控制存儲系統層、地面車站設備層、軌旁設備層、車載設備層、列車系統層,系統架構如圖1所示。
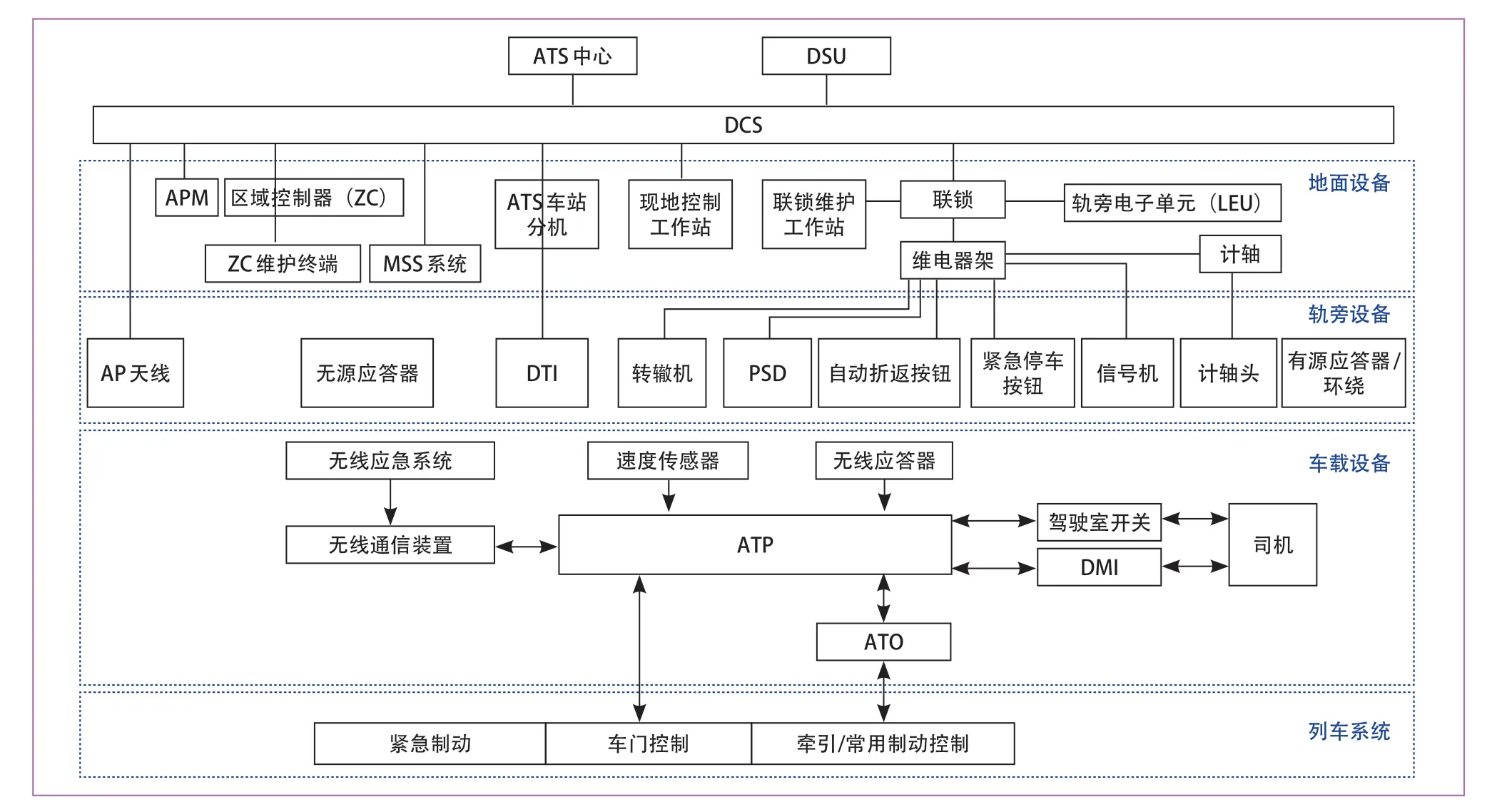
圖1 車地通信列車運行自動控制系統架構組成圖
中央級控制存儲系統層由列車自動監控系統(ATS)中心、數據存儲單元(DSU)和數據通信系統(DCS)組成。ATS中心是一套集現代化數據通信、計算機、網絡和信號技術為一體的、分布式的實時監督、控制系統。ATS子系統通過與列車自動控制(ATC)系統中其他子系統的協調配合,共同完成對地鐵運營列車和信號設備的管理和控制,其核心設備位于信號系統的中央層,用于實現對高密度、大流量的地鐵運輸活動進行自動化管理和調度,是一個綜合的行車指揮調度控制系統。DSU是整個CBTC系統的存儲單元,存儲與列車運行相關的所有設備信息和運行狀態信息,實現對整個ATC所有數據庫管理。DCS是一個寬帶通信系統,為CBTC各子系統的數據通信提供快速、可靠、安全的數據交換通道,其通道類型包括有線和無線2部分。
地面設備層主要由信號系統中的地面設備組成,主要設備為區域控制器(ZC)、聯鎖系統、計軸。ZC 即區域本地計算機,與聯鎖區一一對應,通過DCS保持與控制區域內所有列車進行通信并完成安全信息交互。ZC根據列車的位置信息跟蹤列車并對區域內列車發布移動授權、實施聯鎖。聯鎖系統通過繼電器架連接軌旁部分設備,實現上下信息聯鎖控制。計軸是用以檢測和記錄列車通過計軸點的車軸數,通過2個計軸點之間或軌道區段內的空閑情況,可判斷列車通過計軸點的位置,自動校正列車行駛里程等。
軌旁設備層包括接入點(AP)天線、無源應答器、轉轍機、信號機、站臺門(PSD)、有緣應答器、信號設備的監測和維護系統(MSS)、收發車計時器(DTI)等,共同記錄并上傳和下達列車行駛信息、設備狀態、控制命令,控制車站設備、列車行駛位置信息等。
車載設備層包括無線通信裝置、列車自動防護系統(ATP)、列車自動駕駛系統(ATO)、車載列車信息顯示系統(DMI)、無線應答器、速度傳感器等。該層可實現駕駛員通過車站DMI系統實時觀察列車行駛狀態、車門狀態,并詳細定位列車位置以保障列車的自動駕駛和安全防護。
列車系統層包括緊急制動裝置、車門控制、牽引/常用制動控制等。該層可實現列車的行駛和剎車控制、車門的開關控制、牽引制動控制等功能。
1.2 車地通信列車運行自動控制系統特點
ATP功能在列車超過規定的運行速度時可實現列車的自動制動,即車載設備接收到地面限速信息與實際行駛速度進行比較并判定列車實際速度超過限定速度后,由制動裝置控制列車制動系統進行制動。ATP通過軌道電路或者無線全球定位系統(GPS)檢測列車實際運行位置,自動確定列車最大安全運行速度,并連續不間斷地進行實時速度監督,實現超速防護,同時自動監測列車運行間隔,以保證遵守規定的行車間隔,防止列車超速和越過禁止信號機等功能。
ATO的基本功能包括自動控制列車車站發車、區間運行、跳停、站內精確停車、自動折返、扣車等。列車自動駕駛系統根據ATP系統提供的控制信息(前方信號機狀態、前方道岔狀態、當前線路允許運行的最高速度等信息)實時計算列車達到目標速度值所需要的牽引力和制動力的大小,并通過列車接口電路,完成對列車的加速與減速作業。
在ATO中,列車司機僅起監督作用,而為 ATO提供輔助工作的則是ATP。ATP功能的完備是ATO工作的基礎保障,ATO接受來自ATP的(ATP速度指令、列車實際速度和列車走行距離以及從ATS子系統接受到列車運行等級等)信息。依據ATP所提供信息,ATO通過牽引/制動線控制列車,使其維持在一個參考速度上運行,并在車站站臺準確停車。ATO由車載設備和車地通信系統構成,車載設備包括ATO的CPU板,車地通信板,信息采集電路板,牽引/制動驅動板;車地通信系統包括軌旁車地通信換線、車地通信控制機柜等,其中車載ATO設備是列車駕駛系統中核心設備,它由硬件和軟件2部分組成。
ATS 是通過計算機來組織和控制行車的一套完整的行車指揮系統。ATS將現場的行車信息及時傳輸到行車指揮中心,指揮中心將行車信息綜合后,實時無誤的向現場下達行車指令,以保證行車的準確、快速、安全、可靠。ATS在ATP和ATO的支持下,根據運行時刻表對全線列車進行自動監控,可自動或由人工監督和控制正線(車輛段、停車場、試車線除外)列車進路,并向行車調度員和外部系統提供信息。ATS功能由位于控制中心內的設備實現,所實現功能包括:自動進行列車運行圖管理、及時調整運行計劃、監控列車進路、自動顯示列車運行和設備狀態、完成電氣集中聯鎖和自動閉塞的要求。
2 基于車車通信列車運行自動控制系統概述
2.1 車車通信列車運行自動控制系統組成
基于車車通信的列車自主運行系統(TACS)將CBTC中軌旁的聯鎖功能、ATP功能、ATS功能集成至車載控制平臺,通過“車-車”通信方式實現列車主動進路和自主防護功能。其原理為ATS將運營計劃下發至列車,由車載控制自動觸發進路,列車控制的主要功能由列車實現,只依賴地面對象控制器(OC)的設備驅采及資源登記,TACS運行原理圖如圖2所示。
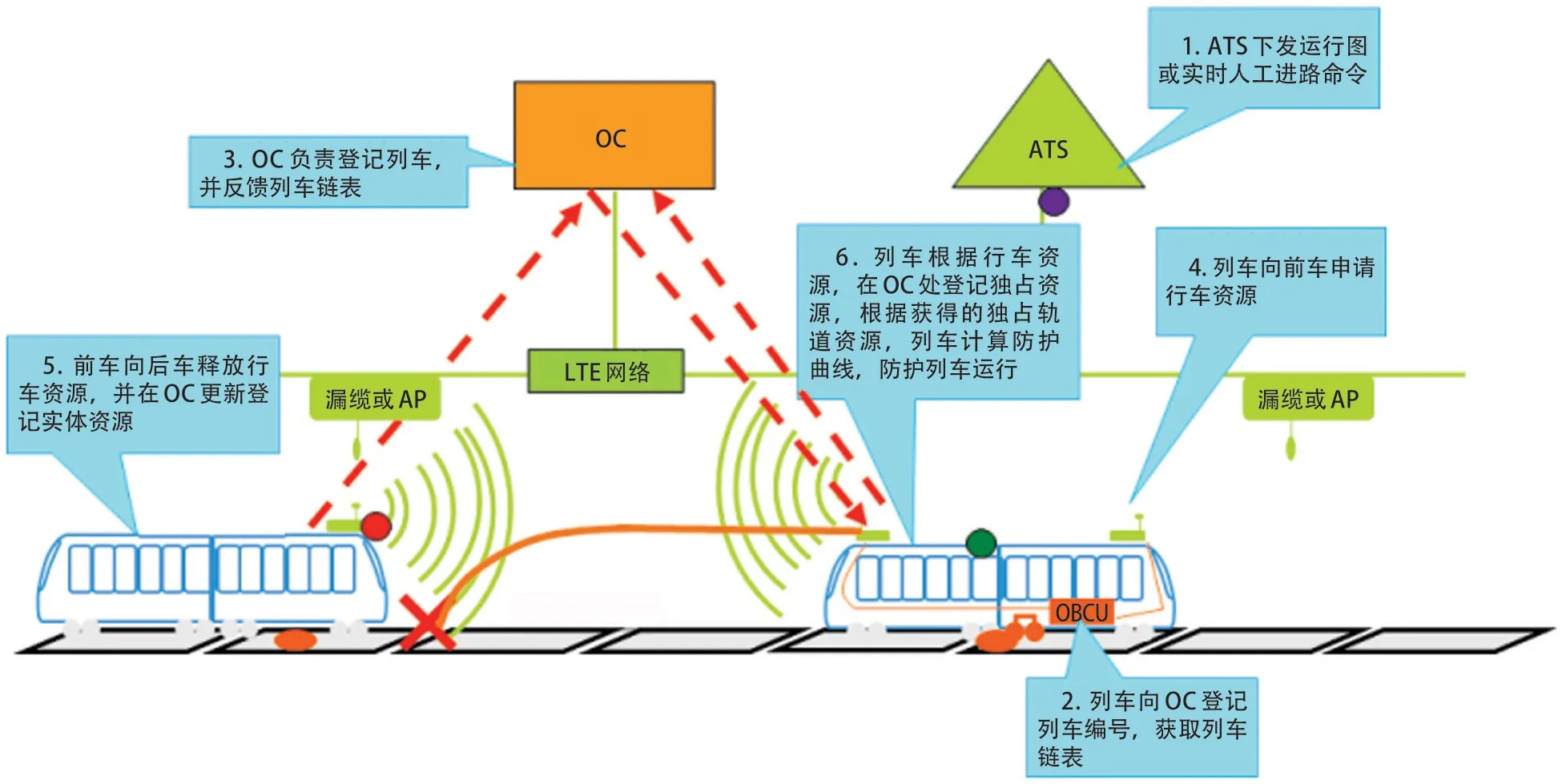
圖2 基于TACS列車自動運行原理圖
2.2 車車通信列車運行自動控制系統特點
TACS采用扁平化架構,由原有的CBTC 3級結構變為2級結構,系統的總控制節點減少。各子系統之間的數據流交互和接口簡單清晰,便于系統部署和擴展,有利于降低運營維護成本。基于車車通信客觀上精簡車地之間交互的信息量以及交互時間,同時采用行車資源統籌方式管理進路,可提升道岔使用效率,提供更小的運行時間間隔。列車自主運行時,僅需無線網絡以及OC設備無故障即可,依賴節點少,可用性更高。進路以列車為起點,建立任意方向安全進路,為運營提供更加靈活和多樣化的運輸組織方案。
TACS的系統特點包含以下幾個方面。
(1)簡化軌旁設備。簡化軌旁的ATP、計算機聯鎖 (CI)、ATS設備,功能集成至車載信號設備;取消點式降級模式。聯鎖降級模式方案應結合運量等運營需求確定,信號機、計軸等軌旁基礎設備結合運營需求優化配置,軌旁設備圖如圖3所示。
(2)列車自主化及分布式控制。基于車與車之間直接的數據通信,實現以列車為主體和控制核心的列車自主運行。通過車載分布式自主控制,減少系統對于中心ATS以及區域集中控制設備的依賴。
(3)車車通信。通過LTE-M技術,實現車與車之間的無線數據通信,以車載時刻表為依據,結合當前行車意圖,由近及遠進行行車資源交互,實現行車間隔防護,車車信號聯鎖圖如圖4所示。
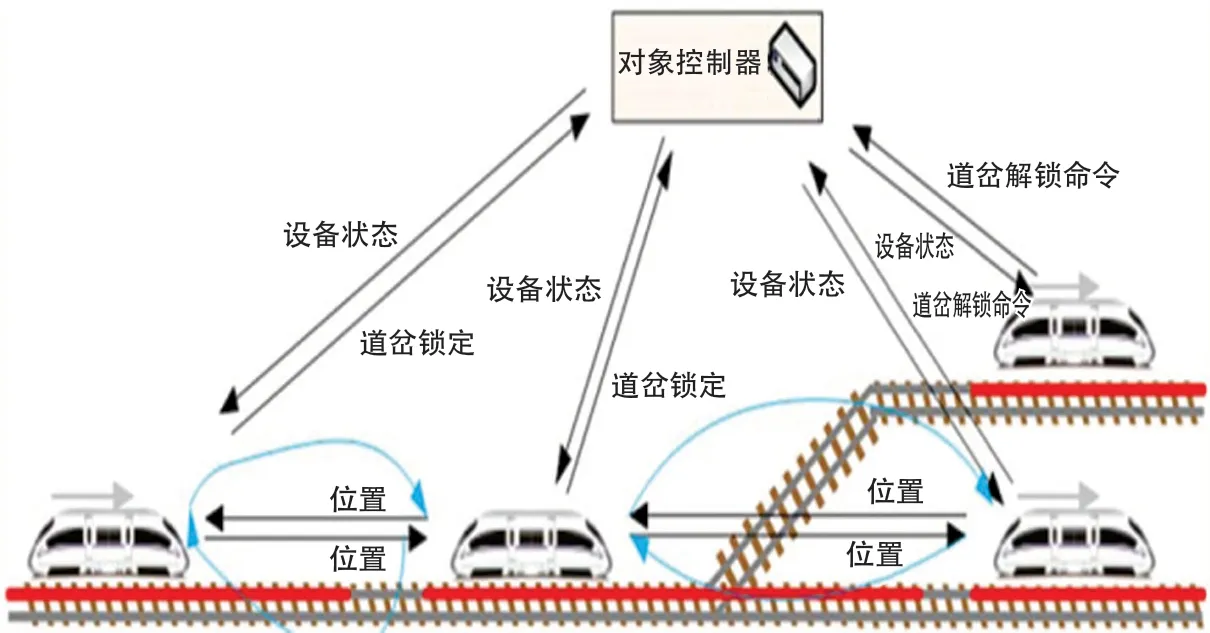
圖4 車車信號聯鎖圖
(4)系統融合。將人機界面、車輛通信網絡、牽引制動系統進行融合。車輛各子系統采用融合設計,可削減冗余功能、整合冗余硬件,優化車載網絡布局,降低系統復雜度,提高系統實時性和列車控制性能、提高自動化程度,使整個系統更加高效節能。
(5)智能化駕駛控制。牽引制動系統融合,可縮短控制周期,提高系統性能,傳統CBTC系統中ATO難以實時獲取牽引/制動能力,列車區間運行及進站停車過程容易出現過牽引/欠牽引、過制動/欠制動以及定點停車精度低的問題。基于車車通信的TACS,使得牽引和制動系統有機會參與ATO控制,因而能夠通過利用牽引/制動能力以及指令反饋信息,縮短ATO閉環控制的周期,提高ATO控制精度。后車實時掌握前車速度和位置,可更合理的跟蹤自己的模式曲線,減少工況切換和追蹤延誤、降低運行能耗。
3 基于車地和車車通信列車運行自動控制系統對比分析
3.1 系統通信技術對比分析
3.1.1 車地通信技術
DCS由軌旁數據通信網絡、車載雙向通信網絡和車載數據通信網絡構成。軌旁數據通信網絡由軌旁骨干網、接入交換機和軌旁設備3部分組成。依據IEEE802.3以太網標準,軌旁設備通過以太網電纜接入到接入交換機中,接入交換機通過多模光纖接入到骨干網,其中軌旁設備與接入交換機組成接入網。軌旁數據通信網通過軌旁無線AP與列車進行雙向通信。骨干網為具有冗余的高速單模光纖以太網,由100 Mbps或1 Gbps的 2層網絡交換機構成,拓撲結構采用雙向自愈環形結構。
骨干網絡必須具備傳輸延遲小、傳輸帶寬大、便于管理、具有抗毀/自恢復能力、能適應工業控制環境的特性。為使地面骨干網絡具有抗毀/自恢復能力,應在連接交換機的鏈路上進行冗余連接,形成冗余的自恢復環形結構。當某條鏈路發生故障時,其備份鏈路自動由備用狀態轉換到主用狀態,從而保證通信的繼續進行。除交換機之間的線路連接外,其他設備與交換機之間的線路連接都應采用冗余連接方式,以提高整個DCS 子系統的可靠性。交換機之間的連接需使用光纖連接,其他設備與交換機的連接可根據需要使用雙絞線或者光纖。
車地無線通信系統主要由2部分組成,分別為軌旁AP與空間無線通道。軌旁AP通過接入交換機接入到軌旁接入網中,軌旁接入網連接在骨干網上,而AP的另一端通過天線組的輻射,以空間自由波為介質,與列車車載通信單元進行通信。由于車地無線網絡傳輸的是列車位置、速度、方向及運行命令等重要信息,因此對傳輸的實時性、丟包率等都有嚴格要求。
軌旁AP應包括1個或2個完全冗余的無線單元協同工作,即軌旁無線覆蓋是完全的雙層覆蓋。軌旁AP應跟據本地拓撲條件與1組或2組含2~4個天線的天線組連接,每個AP通過光纖以太網傳輸層分別連接到相應的接入交換機中。每個接入交換機直接與其所屬的骨干交換機連接,從而接入到骨干網。
AP的覆蓋區應沒有縫隙甚至冗余,且數量不能太多,因此,根據IEEE802.11g標準的物理層參數,結合ISM 2.4 GHz頻段的信號傳播模型,進行AP間距的設計。當車地間距是300 m,傳輸速率是18 Mbps時,不同傳輸速率的列車接收信號電平低于靈敏度的概率都大于99%。因此AP布置間距應設計為300 m,此距離也同樣符合對包丟失率的控制標準 ,信息交互數據流示意如圖5所示。
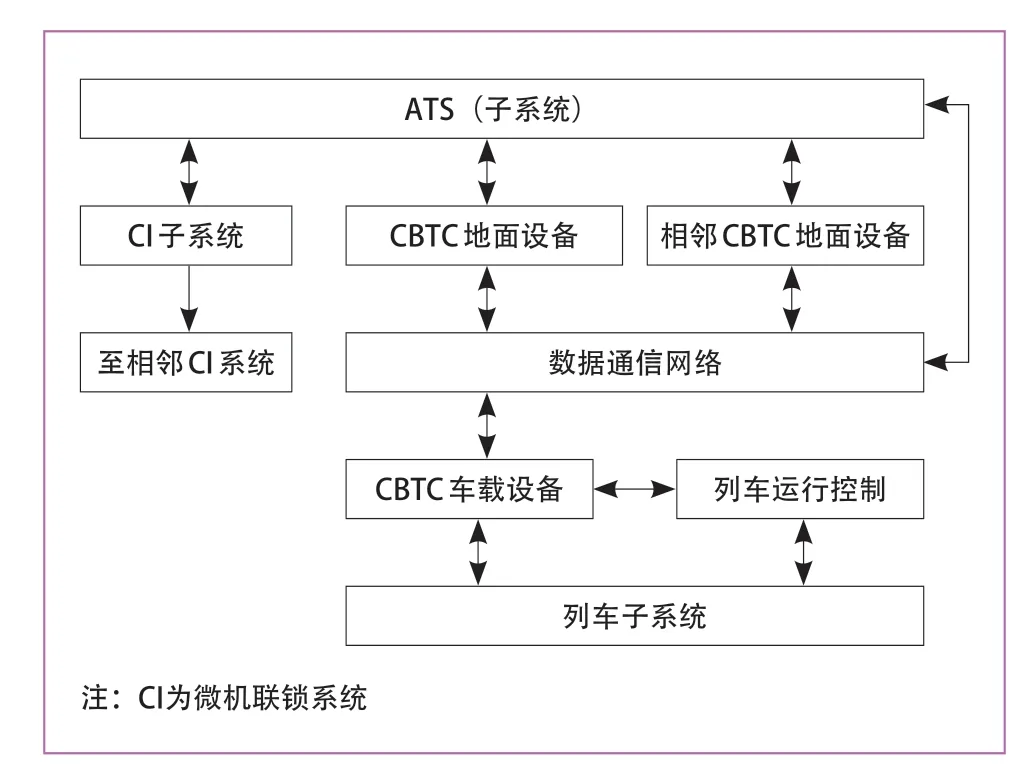
圖5 車地通信信息交互數據流圖
3.1.2 車車通信技術
TACS以“列車”為控制目標、以列車“自主”運行為終極目的,采用簡化系統控制架構、縮短控制環節、車載多系統融合等手段,實現基于車車通信及資源管理的移動閉塞列車控制系統,車車通信是TACS的核心內容之一。列車智能化運用基于全方位態勢感知、故障診斷、運行控制等技術,實現城市軌道交通移動裝備的自感知、自診斷、自決策、自學習、自適應、自修復、自動駕駛的功能,TACS列車自動運行系統圖如圖6所示。
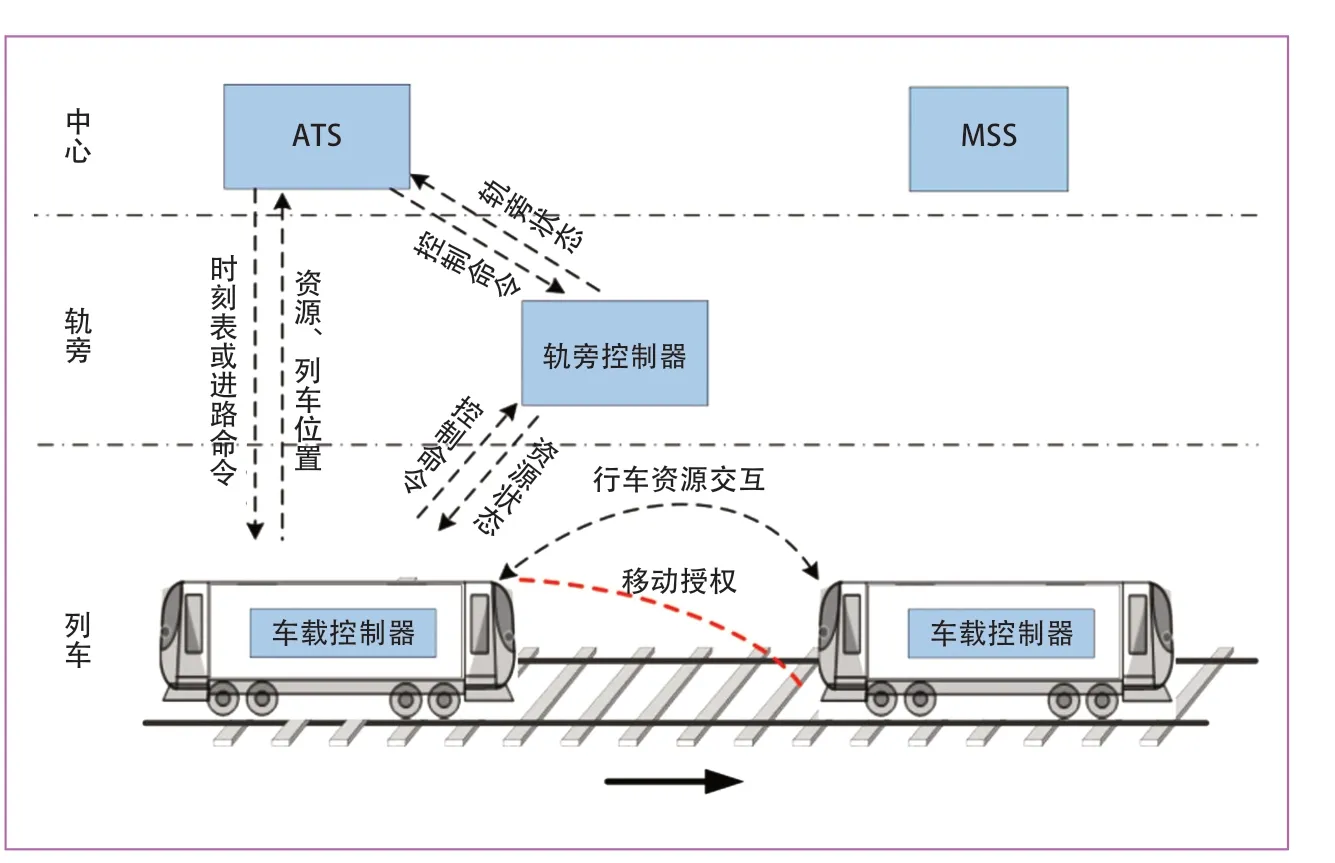
圖6 基于TACS列車自動運行系統圖
TACS以車載控制器為核心的扁平化架構(車車通信)主要體現在以 車載控制器為安全防護、自動運行的核心,弱化中心限制,更利于系統部署和擴展。TACS基于資源管理的進路防護算法主要表現為以高精度行車資源管理為基礎的進路防護算法,提供靈活的安全防護能力,可在任意位置為列車建立任意方向安全進路。TACS車載自主進路體現為車載控制器實時從ATS中同步本車的時刻表信息,在中心ATS故障時,列車可繼續按照時刻表運行。TACS完善的降級設計為軌旁控制器提供完整的降級進路防護功能,系統支持CBTC列車和降級列車混和運行。具體的控制流程如下。
(1)列車從中央ATS獲取預先編排好的時刻表運行圖或實時人工進路(時刻表可在每日列車上線運行時預先下載保存),并根據線路信息自動計算行進和停站計劃。
(2)OC實時登記列車信息和道岔進路等資源占用情況,并向列車反饋執行列車動作命令。
(3)列車在正線行駛時,車載控制器(OBC)直接向鄰車報告和獲取位置、獲得鄰車區段資源占用和釋放信息、向鄰車申請資源占用,同時向OC匯報登記位置并查詢道岔區段等實體資源的占用情況。根據自主計算的進路通過車載控制單元(CCU)、制動控制單元(BCU)、牽引控制單元(TCU)計算牽引制動曲線進行控制。
(4)OC對實體資源狀態進行監控和控制,同時接受來自控制中心(OCC)的臨時操作命令,如限速、扣車跳停、臨時交路、人工進路排布等。
3.2 系統工作原理對比分析
3.2.1 車地通信列車運行自動控制系統工作原理
傳統車地通信列車運行自動控制系統基于軌旁信號設備控制列車進路、實時計算移動授權;通過車載信號設備實現列車定位、實施控制列車運行。系統實時動態自動調整軌旁間隔,所有車輛的信號控制采用控制中心集中式控制,統一調度運行,工作原理如圖7所示。
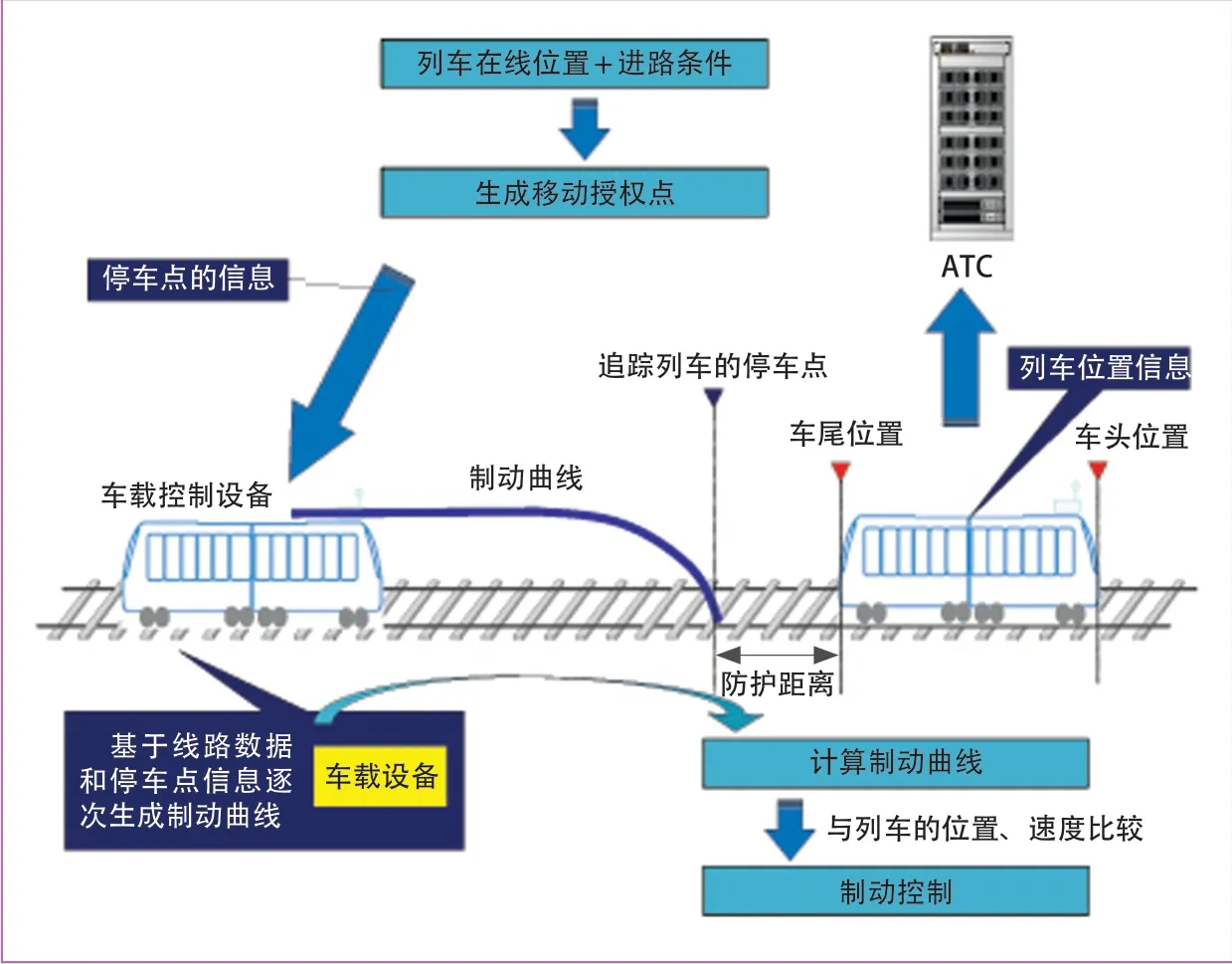
圖7 車地通信列車運行自動控制系統工作原理
3.2.2 車車通信列車運行自動控制系統工作原理
車車通信列車運行自動控制系統是所有運行列車采取列車主動進路,列車自主防護,列車自主調整,分布式控制,實現列車全自動運行智慧化,減少控制中心人為調度強度,實現列車之間信號互相感知,自動實現運行狀態全方位精準感知、運行趨勢智能化分析預判、信息指令一體化主動推送、運行規則擬人化,線路上所有運行列車互相間保持信息暢通,每列列車不斷修正自己的運行信息,實現自動進化等相關功能,工作原理如圖8所示。
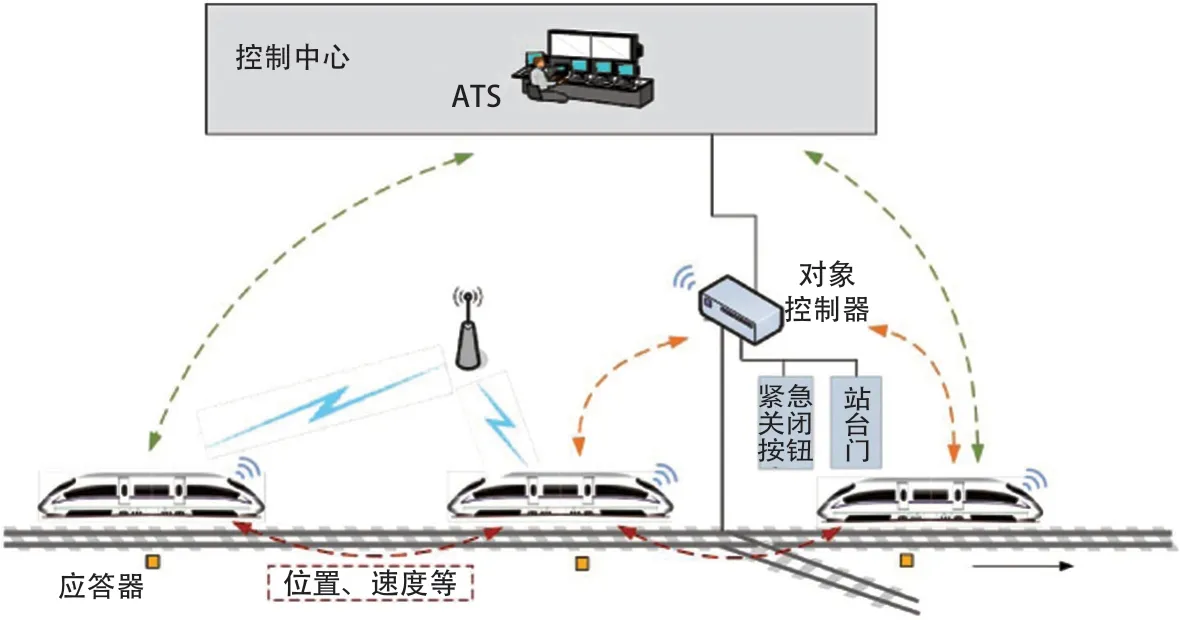
圖8 車車通信列車運行自動控制系統工作原理
3.3 系統功能實現及接口對比分析
3.3.1 車地和車車通信列車運行自動控制系統功能實現
傳統基于車地通信列車運行自動控制系統功能主要包括列車識別與追蹤、列車進路、列車運行圖/時刻表編輯和管理、列車運行自動調整、能量優化、中心人機界面、車站人機界面、報告、報警與存檔、列車安全分隔/移動授權、臨時限速、列車定位、超速防護、列車自動駕駛、進路控制、道岔和信號機控制、輔助列車檢查、地面設備間通信、車地無線通信等。基于車車通信列車運行自動控制系統功能主要有列車注冊、時鐘同步、篩選、移動授權、路徑信息、屏蔽門系統(PSD)/緊急停車按鈕(ESB)/道岔狀態、臨時限速、區域防護、庫門防護、軌旁人員作業防護開關(SPKS)、CBTC模式進路辦理、降級模式進路辦理、CBTC模式停穩信息、停車保證、計軸故障檢測、列車完整性檢測、障礙物檢測、喚醒、休眠、列車間隔調整等。功能實現及其所涉及系統對比分析如表1。
3.3.2 車地和車車通信列車運行自動控制系統接口
傳統車地通信列車運行自動控制系統內部接口包括ATS與車站聯鎖系統(CBI)、CBI與ZC、ZC與VOBC、VOBC與CBI、CBI與相鄰CBI,以及ZC與相鄰ZC之間接口等,接口關系復雜。車車通信列車運行自動控制系統內部接口包括ATS與OC、ATS與OBC、OC與OBC,以及OBC與相鄰OBC之間接口等,接口系統簡單,維護方便,系統的智能化水平高,具體如圖9所示。
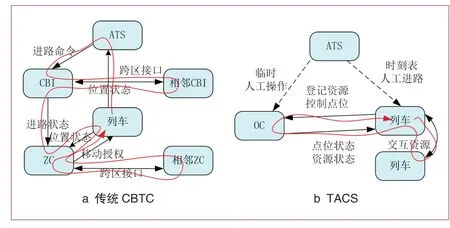
圖9 系統接口對比分析
3.4 系統性能指標和能力對比分析及總結
TACS列控系統將傳統CBTC信號系統的OBC-ZC/CBI的集中式控制架構改為OBC-OBC、OBC-OC的分散式控制架構,基于車地通信列車運行自動控制系統和基于車車通信列車運行自動控制系統可靠性、可用性、安全性指標,以及系統能力對比分析如表2所示。

表 1 系統功能實現及其所涉及系統對比分析
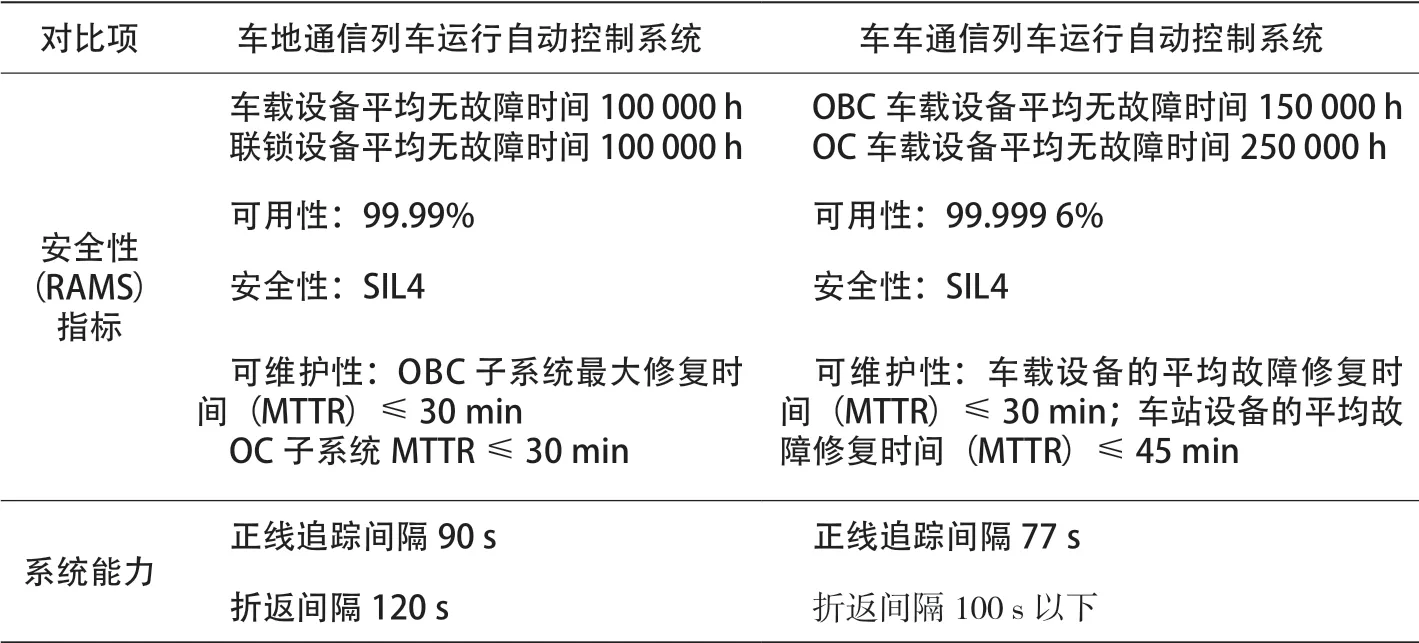
表2 系統性能指標和能力對比分析
車地通信技術相對比車車通信技術具有技術復雜、傳輸節點多、故障率相對較高、工作原理復雜、軌旁和車站機房設備多、接口較多、車體自動化、智能化水平較低,在建設期間具有軌旁設備安裝多、夜間施工多、工期長、設備安裝空間緊張、風險大、設備用房面積大、調試時間長等特點,后續運營維護量大、復雜的地面設備、信號與車輛的單獨維護;基于車車通信列車運行自動控制系統,在建設期間具有安裝設備少、夜間施工少、工期短、設備安裝空間小、風險小、設備室面積減少15%~20%、調試時間縮短30%等特點,后續運營維護量小、復雜的地面設備、維護工作量減少。
基于車車通信列車運行自動控制系統從技術對比、工作原理、系統組成、系統特點、系統維護、性能對比都明顯優于基于車地通信列車運行自動控制系統,雖然兩者均為列車自動運行安全系統,但TACS系統可靠性、可用性、安全性均提高,TACS系統能力提升15%~30%。
4 結束語
隨著5G通信網絡在國內地鐵系統的全面建設和覆蓋,基于車車通信列車運行自動控制系統的系統組成、系統特點、系統維護、性能對比都明顯優于基于車地通信列車運行自動控制系統,可以更好的提高行車智慧化水平,實現全自動運行更安全、更智能,賦予列車海量數據實時協同、智能分析、精準定位等功能,降低系統建設和運營成本,助力信號系統轉型升級,使地鐵運營朝著智慧化方向發展。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2018年11期)2018-08-04 03:26:08
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
工業設計(2016年12期)2016-04-16 02:52:00
中外會展(2014年4期)2014-11-27 07:46:46
消費者報道(2014年7期)2014-07-31 11:23:57
