
面向科技競賽的自動控制搬運小車設計
2022-06-19 21:41:55吳羽歆趙振偉陳思羽王海琛張力文張悅
科技創新導報 2022年3期
關鍵詞:單片機
吳羽歆 趙振偉 陳思羽 王海琛 張力文 張悅

摘要:本文基于單片機keil和Arduino技術,設計、制作并控制一臺起重機器人,對中國大學生創新類比賽的實際賽況線路控制,做了較為詳細的技術分析。本設計采用OpenMV作為識別標識的前端輸入部件,Arduino與單片機為控制元件,通過利用Arduino與單片機串口通信來實現車體移動,單片機控制鉤取裝置和其他連接元件實現精準識別取物,保證重物擺放位置的精準性,實現全自動化。
關鍵詞:搬運機器人 控制系統 單片機 Arduino PID
Design of automatic control handling trolley for science and technology competition
WU Yuxin,ZHAO Zhenwei,CHEN Siyu,WANG Haichen,ZHANG Liwen, ZHANG Yue
(School of mechanical engineering,Shenyang University of Technology,Shenyang, Liaoning Province, 110870,China)
Abstract:Based on the keil and Arduino technology of single-chip microcomputer, this paper designs, manufactures and controls a crane robot, and makes a detailed technical analysis of the actual circuit control of the innovation competition of Chinese college students. This design uses OpenMV as the front-end input component of the identification mark, Arduino and single-chip microcomputer as the control components, and realizes the movement of the car body by using the serial communication between Arduino and single-chip microcomputer, and the single-chip computer controls the hooking device and other connecting components to achieve accurate identification and retrieval, ensuring heavy objects. The accuracy of the placement position is fully automated.
Key Words:Handling robot; Control system; MCU; ArduinoPID
中國大學生起重機創意大賽是由中國機械工程學會主辦的“中國大學生機械工程創新創意大賽”系列專業賽事之一,其宗旨是通過大賽增強大學生的科技創新意識,鼓勵大學生積極投身科技創新與工程實踐活動,提高大學生針對實際需求進行起重機設計和工藝制作的動手能力,拓寬大學生的科技創新視野,提升大學生對起重機在國民經濟各領域的應用意識。2020年中國大學生起重機創意大賽成為全國創新人才培養與學科競賽評估排名賽事之一。
大學生科技競賽是培養創新型人才的重要手段[1]。大學生科技競賽中的自動控制搬運小車,采用機器視覺、步進電機、伺服電機、自動控制等技術[2-5]。搬運小車的設計為參加中國大學生起重機創意大賽,要求設計、制作一臺起重機器人,基于機器視覺,對固定取物區具有特定顏色及形狀標識的搬運物品進行識別,通過自主有序的控制方式將物品從取物區按通行規則通過設置有兩個障礙物的通行區搬運到堆碼區,期間不得觸碰障礙物圓柱體,搬運物品的最底面不能超過障礙物的最高端面,完全堆完6個箱子即完成比賽。
1搬運小車的機械結構設計
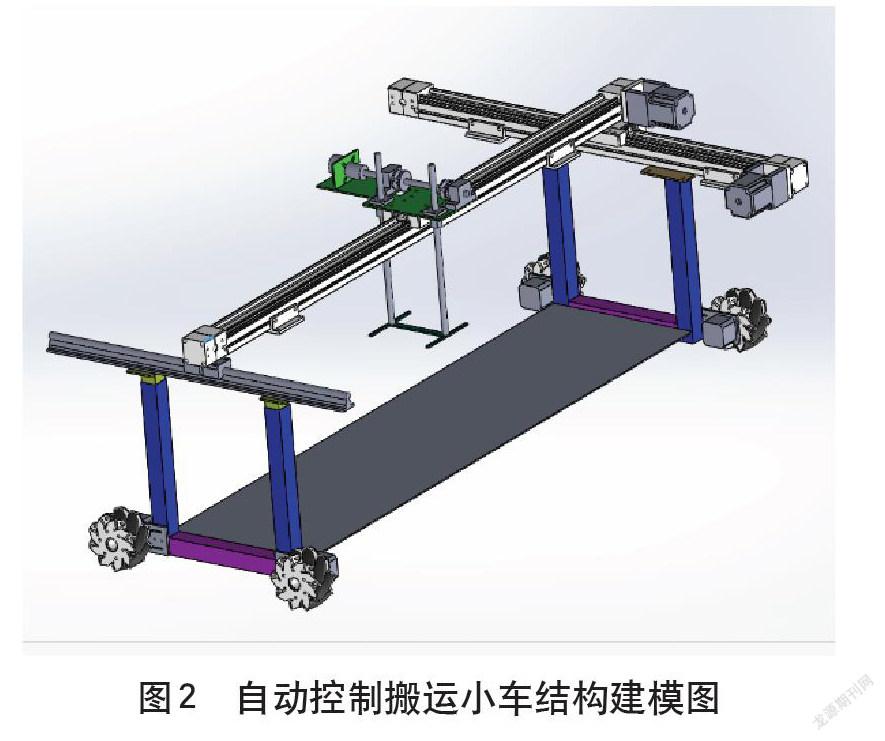
搬運小車整體呈方形框架,上方為車體抓取部分,下方為車體移動部分。所述車架的四角分別設有空心鋁方管,4根空心鋁方管的上端均安裝有支撐座,一對所述支撐座上設置有同步帶模組,另一對所述支撐座上設置有光軸,同步帶模組和光軸上另設有另一個同步帶模組,同步帶模組上設有步進電機,用于驅動同步帶模組;同步帶模組上設有隨同步帶板一起移動的立體板,用于放置驅動電機,所述車架的四角安裝有步進電機,該步進電機的輸出端設有麥克納姆輪,為搬運小車運動機械結構;鉤取結構中橫桿的兩端設置有一對豎桿,鉤取裝置形狀成一個“工”字形。自動控制搬運小車結構設計圖如圖1所示,自動控制搬運小車結構建模圖如圖2所示。
2控制系統
2.1 OpenMV識別校準
在攝像頭捕捉到標識圖標,在機器視覺中的閾值編輯器調閾值參數,將其反饋的閾值參數編入OpenMV程序中[6-8]。若最后OpenMV的串口打印輸出與實體標識不一致,則為閾值參數調整不到位,需要進一步調整參數閾值。在調試過程中,因為有其他物體的干擾,所以在調試中將OpenMV的鏡頭識別范圍調小,前后挪動鏡頭的固定位置,取該區間的閾值范圍作為最終數據。特別需要注意競賽場地光線的影響,由于打印的標識反光度比較大,在攝像頭識別標識時候需要人工進行光線遮擋,以避免影響后續抓取。
2.2步進電機控制
當單個調整鉤取裝置得到的電機反饋的圈數數據直接用于整體機械運行,可以看見單個部分調整與整體調整的圈數是不一致的。出現這個問題的原因是整體運行時各部分分布的電壓的不同,可以通過微調受影響的零部件參數進行調整。該搬運小車的同步帶采用的驅動器是雷賽智能的M542C高細分驅動器,一個M542C驅動器控制一個步進電機,在Signal接口中,采用的共陰接法[9-10]。B22B7373-4DEC-4753-A110-A474BB5AF2DF
該搬運小車的步進電機驅動器程序設計需要定義方向信號和脈沖信號的引腳。步進電機是一種將電脈沖轉化為角位移的執行機構。電機的旋轉是以固定的角度一步一步運行的。通過控制脈沖個數來控制角位移量,從而達到準確定位的目的。本程序設定需要間隔設定初始化引腳,以控制一定時間的脈沖個數達到控制速度的目的;以調整脈沖IO口的GPIO_ResetBits與GPIO_SetBits函數間隔時間來調整速度大小。
2.3伺服電機控制鉤取裝置調試
本文所設計搬運小車的取物方式為鉤取,本鉤取裝置的動力源為伺服電機。伺服電機的控制原理是通過控制脈沖時間的長短控制轉動角度。鉤取物品需要較為精準的伸縮位移和適宜的電機速度,所以在控制程序上采用“速度+位置PID雙閉環”的方法來實現精準控制鉤取位置。為了使鉤取物體的時候保證物體不滑落和到達指定距離時候維持鉤取穩定,需要觀察傳輸至PC端的數值嘗試多個值細微調整電機的轉速和剎車距離來確保鉤取物體的有勁與穩定。
伺服電機需要用PMW波控制的,所以在控制程序上設定使能PMW的IO口;使能時鐘TIM4并設定定時器TIM4的中斷服務函數,為計算電機旋轉路程做準備;設定電機的編碼器模式,初始化IO口和定時器TIM3;設置基礎PID的計算函數,確保PID閉環精確控制速度與距離。控制電機正反轉程序一起并入PID的程序,便于設計鉤取裝置以位置環為主,速度環為輔,把位置值采回去給單片機CPU,CPU把這個采集回來的實際位置和設定位置做比較,若實際數值小,就通過控制信號讓電機繼續正轉,若實際數值大,就通過控制信號讓電機反轉。
2.3四驅步進電機驅動板控制車體運動
驅動板的上層為設計的電路板用于連接DRV8825驅動器和下層的Arduino控制板。上層電路板接通24V電源,通過電路板中的電容降壓到5V來控制驅動器,驅動器為64細分,能較為精準控制電機移動量。Dir函數?來控制步進點擊的正反轉,以達到控制?輛前進、后退等功能;Step函數表示電機轉的路程,Step函數根據控制?低電平的次數達到輸出穩定的脈沖個數,脈沖個數代表了電機可以?進的位移;Speed函數?來表示電機的轉速。
3搬運小車整體調試
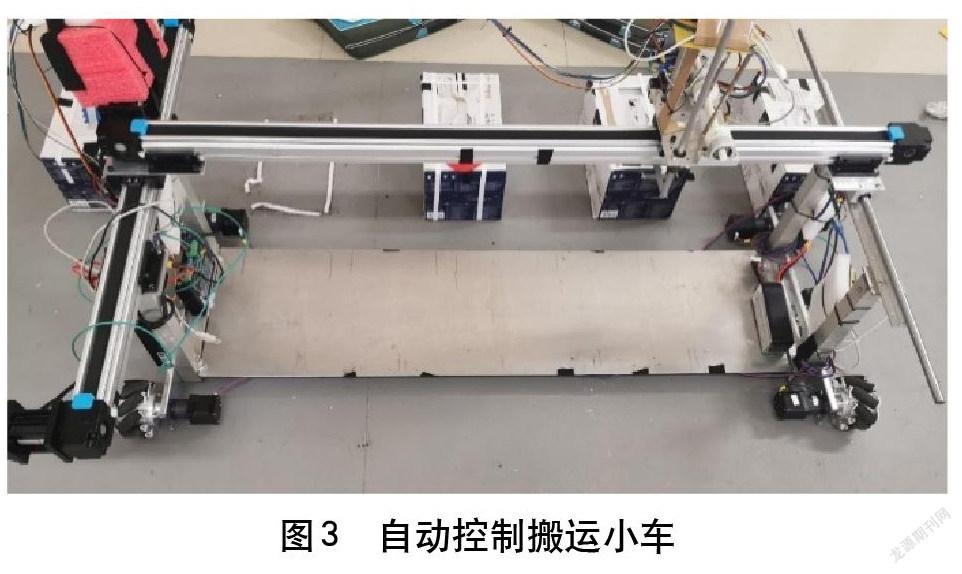
在整體調試的時候,搬運小車出現了程序運行亂套問題。最初調試時,一個單片機串聯所有設備,在程序過渡時,控制輪子的步進電機不動,且伺服電機未能閉環反而開始亂轉。經過多方面排除,初步懷疑步進電機四驅步進電機驅動板通過單片機發出的信號干擾伺服電機接收。將四驅步進電機驅動板單獨出一個單片機但與同步帶同電源,干擾仍存在,查閱資料后懷疑四驅步進電機驅動板通過同電源的電源線產生電磁進行干擾。最后將同步帶與四驅步進電機驅動板分開電源,干擾消除。當伺服電機與步進電機共同運轉時,需要獨立單片機控制和獨立電源供電來消除相互干擾。自動控制搬運小車如圖3所示。
4 結語
基于OpenMV圖像處理算法和競賽中的比賽規則設計并實現了競賽型起重機的運動。設計了新型起重機通過設計鉤子的種類,解決了重物不穩定的問題。通過串聯攝像頭與電機之間的關系,實現了重物擺放位置的精準性,并且實現了全自動化,全程只需人工進行啟動此機構。通過OpenMV識別標識并與主控制板通信,主控制板與四驅步進電機驅動板的通信,實現整體起重機的按比賽要求進行移動、鉤取的運轉。中國大學生起重機創意大賽,以起重機工程應用為牽引,充分融合了結構、控制、智能及機械加工技術,作品新穎性強、實用性高。通過大賽增強大學生的科技創新意識,提高大學生針對實際需求進行起重機設計和工藝制作的動手能力,擴寬大學生的科學視野。比賽中通過匯聚行業學會專家、知名企業代表、高等院校學者等一系列學術競賽交流活動,激發出當代大學生的潛力,提高了大學生工程創新創業能力和工程實踐能力,是行業、企業、高校之間知行并舉、協同育人、產學合作的一次有益探索,為培養一流工程創新人才不斷改革創新。
參考文獻
[1]? 李翠英,蘇盈盈,劉金晟.以競賽為平臺培養大學生專業創新能力的實踐[J].科技資訊,2020(4):235-236.
[2]? 李振宇.基于Arduino技術的光電搬運機器人設計與編程(一):循線技術與線路控制[J].首都師范大學學報:自然科學版,2021,42(4):8-11.
[3]? 李華文,倪駿,程倩.淺談基于CPLD的G.D伺服的抗干擾系統設計[J].中國設備工程,2021(9):95-96.
[4]? 白永威.基于CPLD伺服系統的速度測量及抗干擾技術[D].沈陽:沈陽工業大學,2017.
[5]? 韓利虎.淺談步進電機的基本原理[J].內蒙古石油化工,2007(11):240
[6]? 賀龍豹.競賽用搬運機器人的設計與實現[D].南京:南京財經大學,2013
[7]? 劉學文.基于stm32單片機的智能小車控制[J].現代制造技術與裝備,2019(1):192-193..
[8]? 董期林,周曉東,馬媛,等.基于模糊自整定PID控制器的直流電機伺服系統的仿真研究[J].機床與液壓,2009,37(2):117-119.
[9]? 張輝,李應岐,方曉峰.機器人空間三點圓弧的圓心算法及MATLAB實現[J].科技資訊,2021(15):21-23.
[10]????? 郭勤,蔡亞永.智能小車控制系統的設計與實現[J].電子測試,2021(11):25-26B22B7373-4DEC-4753-A110-A474BB5AF2DF
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36
