風電/光伏發電接入電網的電壓穩定及控制分析
2022-06-21 07:11:14董玉輝梁君亮
中國新技術新產品 2022年5期
關鍵詞:指令
董玉輝 梁君亮
(華電山東新能源有限公司,山東 濟南 250000)
1 風電/光伏發電接入電網的電壓穩定分析
1.1 靜態電壓穩定分析
電壓穩定指的是電力系統受擾動后維持母線電壓在可接受范圍內的能力,當電力系統出現小擾動時,須采用靜態模型進行電壓穩定分析。在風電接入電網過程中,迅速增長的負荷或較大的風速波動都將給系統帶來小擾動,導致系統出現短期或長期電壓失穩問題。雙饋型、永磁型發電機則能通過變流器連接電網,實現有功和無功功率解耦控制,采用無功補償和無功潮流調整等方式穩定電壓。針對光伏發電入網環節,該文將發電機組當成是電壓源或電流源,在靜態電壓穩定分析中,將根據節點潮流進行判別,精確模擬節點性質。系統由DC-AC變換器、控制器、光伏電池列陣、電能儲存單元等構成,在產生的直流電轉換為與電網同頻的交流電后并網,此時需要依靠控制器進行最大功率點、并網頻率等參數跟蹤控制。
1.2 動態電壓穩定分析
由于新能源并網規模呈持續擴大的趨勢,因此需要加強動態電壓穩定分析,以確定機組和逆變器等設備動態響應特性給系統電壓穩定帶來的影響。對于風電入網期間發生的脫網等事故,應主要從增加硬件裝置和改進控制策略兩個方面改善系統的暫態電壓穩定性。如在轉子控制上采用撬棒電路,能夠增強機組低電壓穿越能力。使用柔性交流系統和無功調節設備,能夠為系統提供無功支持。在光伏發電并網期間,內部無功調節設備配合不當,會導致機組出現過補償或欠補償問題。如果根據機組低電壓穿越特性進行建模仿真分析,則可以根據故障恢復時的無功功率進行補償,實現機組電壓輸出的動態無功調節,保證電網穩定運行。
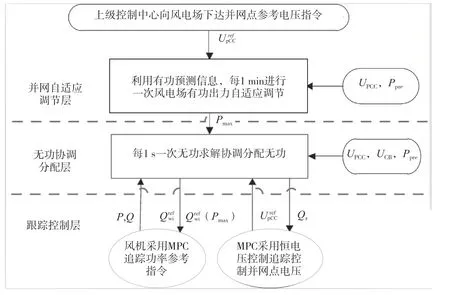
圖1 風電入網電壓分層預測控制架構
2 風電/光伏發電接入電網的電壓控制策略
2.1 風電接入電網的電壓控制
雖然風電機組多能實現動態無功補償,但要求裝設的多個無功設備可以達到電壓協調控制要求,則容易出現電壓滯后控制的問題。因此該文引入分層預測模型MPC進行無功電壓控制,通過預測電壓和無功變化實現自適應調節。

在電壓控制過程中,考慮到風電機組輸出電壓較低將產生較大的電阻和電抗比,在一個節點電流不為零的情況下,可以根據節點電壓和該點功力確定有功和無功電壓靈敏度系數。因此在并網節點,由功率波動引發的機組和系統的電壓偏差ΔU與有功和無功的關系滿足式(1)。

式中:U為并網點實際電壓,ΔP為有功變化,ΔQ為無功變化。
可以根據上級發送的參考電壓和有功功率預測結果估測調壓極限,達到超前控制并網點電壓的目的。根據1min內并網點電壓變化軌跡,與機組調壓能力相結合,并根據極限調壓曲線和調度指令可確定有功輸出曲線,實現電壓自適應調節,如圖2所示。在對最大功率曲線進行追蹤時,應確認t時刻是否超出指令控制周期T,超出后需要確定新的指令,對下一控制周期進行預測,未超出則可以在t+1時刻繼續執行指令。而參考指令超出調節范圍,判斷機組無功調節不足,需要使調節后電壓和節點指令偏差達到最小值,然后在預測有功達到最大值時進行輸出功率調整。
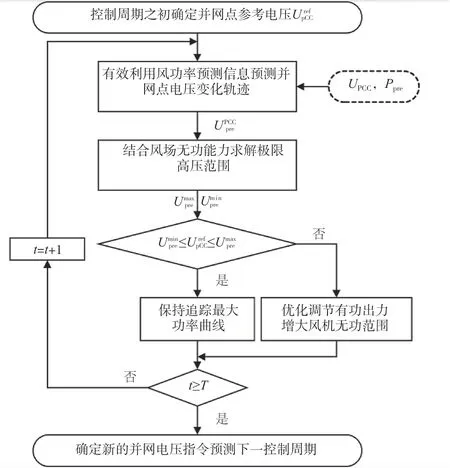
圖2 風電入網電壓分層預測自適應調節
機組無功輸出上限應取參考指令和有功上限中的最大值,輸出下限則取參考指令和有功下限中的最小值。因此在有功功率發生變化時,機組無功輸出也將發生變化,通過將無功調節和節點預測電壓疊加,能夠獲得極限電壓調節的上限和下限。根據預測到的最大功率值,應在無功補償不足的情況下進行有功調節,處于預測有功最大值位置的電壓偏差值ΔU可以利用式(2)計算。

式中:min F為最小偏差目標函數。
通過分析能夠確定電壓偏差值,得到需要調節的有功輸出量。在無功協調分配方面,需要先確定控制目標,即使節點電壓和參考電壓偏差達到最小值,同時使靜態無功儲備達到最大值。在k時刻,根據并網節點電壓和參考指令偏差,能夠確定母線電壓和參考電壓偏差,如公式(3)所示。

式中:U為母線實際電壓;ΔP(k)和ΔQ(k)分別為k時刻的有功和無功變化。
將參考指令電壓當成目標,利用靜態無功發生器進行節點電壓跟蹤控制,能夠避免出現電壓不穩的問題。在提供足夠無功補償的情況下,可以及時響應調節指令。但在實際的風電機組運行過程中,無法做到向各機組等比例分配無功輸出,這將使部分機組無功輸出無法得到有效利用,對此需要進行無功補償,如公式(4)所示。

式中: Q為無功參考指令;Q無功補償需求,n為風機數量,δ為風機i的無功分配系數,根據其最大無功值Q,Q為全部風機最大無功輸出。
通過合理分配能夠做到有效利用風機無功補償性能。在實現MPC控制方面,為實現快速響應,可對無功電壓進行跟蹤。對于風電入網的弱連接性問題,需要建立狀態空間模型,結合風機特性對控制輸入和外部干擾等變量進行離散化處理,然后進行有功和無功輸出跟蹤。令轉子d軸和q軸電流分量分別表示有功和無功輸出,能夠得到電流輸出參考值,建立機組輸出控制目標函數,使輸出變化達到最小,如公式(5)所示。

式中:minF為機組輸出控制目標函數;M指的是預測時間段,y為有功輸出參考值,y(k+m|k)為k時刻、m步的有功預測控制輸出結果,y為電流輸出參考值,W和W分別為系統控制的輸出和輸入權重,Δu(k+m|k)為系統控制輸入變化。
通過實現分層預測控制,能夠提升風機風速,使有功出力漸漸達到飽和狀態。未進行無功補償時,系統將利用靜態發生器進行電壓調節,如果未能滿足需求,系統將進行無功補償,使裕度取得理想的電壓控制效果。
2.2 光伏發電接入電網的電壓控制
光伏發電帶有分散性,通常單點容量較小,需要就近接入電網。受負荷密度低、供電距離長等多種因素的影響,在機組發電高峰時段,光伏發電可能引發電網潮流分布變化迅速造成沿線電壓升高,因此需要采取適當的機組接入方式,并做好電壓調整,綜合運用不同策略加強電壓控制。
在光伏發電接入過程中,需要根據并網容量、電站電壓等級等多項因素確定電壓水平。從理論層面來看,應確保機組負荷距比最大負荷距的運行電壓小,以滿足并網要求。如10kV光伏電站的接入容量和距離應滿足表1的要求,即接入容量為1800 kW~2500 kW。在光資源相對集中的區域,考慮到裝機位置已經固定,為確保接入容量和配電變壓器相互匹配,并確保尚未接入容量不超變壓器的一半,可以采取增設變壓器數量或減小供電半徑等措施,避免光伏發電機組在入網過程中引發電壓升高問題。如果光伏發電接入的配電網為中低壓等級,應通過末端接入電網,并通過無功補償設備或變壓器變比進行電壓調節。通常情況下,35kV光伏電站均配有動態無功補償設備,入網后帶來的電壓波動較小,可以滿足電網穩定運行的要求。而通過10kV線路接入電網時,可以加裝調壓器來應對光伏發電功率變化,實現電壓自動調節。如果為屋頂光伏發電機組,在分散接入電網的過程中可以在進線側使用雙向調壓器來進行高、低電壓調節。
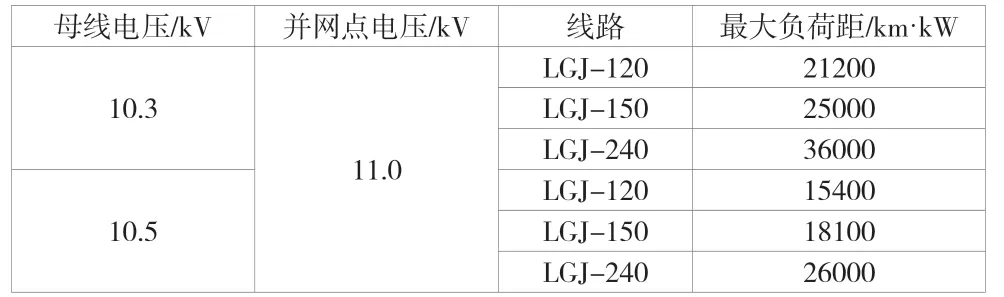
表1 10kV光伏電站接入容量表
對于目前需要接入大量光伏發電機組的情況,應實施動態無功補償,以免出現電壓嚴重越限問題。該文應用自適應模型進行功率預測,運用智能控制算法進行電壓控制,以保障電壓的穩定性。具體來講,就是在當前時刻建立預測模型,使控制量u(k)進入實際和預測的被控制對象模型,通過分析得出下一刻的實際和預測輸出,如圖3所示。根據二者差值確定預測誤差,能夠對下一刻預測模型進行修正。
在逆變器輸出的有功功率和無功功率不可控的情況下,需要利用傳感器進行信息采集和傳遞,然后通過內部運算確定線路負載情況。保持四象限運行,可以使逆變器滿足視在功率,然后產生任意輸出。通過控制無功輸出,可以達到電壓升高上限控制要求,如圖4所示。將1s看作一個周期,各周期開始時預測模型無變化,根據上個周期a等模型參數和有功功率輸出P能夠對逆變器輸出無功值Q進行確認。實現無功輸出的目的是使節點電壓V下降。無功輸出達到負值,說明存在有功引起的電壓越限問題,需要對感性無功進行吸收;無功輸出為正值,說明有功輸出較小,不會導致節點電壓越限,無需吸收無功。在誤差允許的條件下,節點電壓將與調度層預定值相等,說明不存在電壓越限問題,因此模型不會發生變化。根據實際輸出的無功值,可以對模型結構參數進行更新。在模型發生變化時,則需要進行電壓反饋調節,在電壓超出上限時使系統吸收更多的無功,否則應減少無功吸收。
3 結論
受發電間歇性特性影響,風電/光伏發電接入電網過程中會出現靜態和動態電壓穩定問題,導致電力系統出現較大電壓波動,給電網穩定運行帶來威脅。該文結合不同發電項目特點,在風電入網階段采用分層預測電壓控制策略,充分利用了機組無功補償。在光伏發電入網階段,對接入方式和電壓控制策略等進行了系統優化,以滿足電網穩定運行要求。可見,解決新能源消納問題,構建以新能源為主體的新型電力系統,能夠推動電力事業的健康、可持續發展。

圖3 光伏發電入網電壓自適應模型預測算法
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(2016年10期)2016-11-23 05:11:56
時代農機(2015年3期)2015-11-14 01:14:29
科技傳播(2015年20期)2015-03-25 08:20:30
信息安全研究(2015年3期)2015-02-28 20:18:12
西安航空學院學報(2014年5期)2014-07-13 01:27:52
家電科技(2014年5期)2014-04-16 03:11:28
汽車零部件(2014年2期)2014-03-11 17:46:27
