電子巡航分級預警監管模式 在黃浦江水域的應用探索
2022-06-22 21:55:18鄭丕顯張光輝張焱
航海 2022年3期
鄭丕顯 張光輝 張焱


摘要:本文將研究水域進行了網格劃分,基于船舶領域理論、風險因素分析及船舶監管實際,設計了不同級別的電子巡航預警信號,并提出針對性管控措施,形成了一套可復制、可推廣的黃浦江水域電子巡航分級預警監管模式,從而不斷提高電子巡航系統的智能感知能力。
關鍵詞:黃浦江;電子巡航;分級預警;監管模式
中圖分類號:U692? 文獻標識碼:A
0 引 言
隨著海事信息技術的不斷發展,電子巡航已成為黃浦江海事管理機構較為常見且有效的監管手段,為進一步挖掘黃浦江電子巡航智能監管潛力,本文從分類管理、風險分析、多級預警、閉環管控等多方面著手,探索電子巡航分級預警監管模式在黃浦江水域的應用,以期提高電子巡航智能感知風險能力,更好地輔助電子巡航員開展日常海事監管工作。
1 電子巡航背景
電子巡航是利用船舶交通管理系統(VTS)、船舶自動識別系統 (AIS)、全球定位系統(GPS)、閉路電視監控系統(CCTV)、甚高頻無線電話(VHF)等信息化系統對轄區航道、碼頭、錨地、港池、渡口及轄區內船舶航行、錨泊和作業等情況的巡查,以實施水上安全監管、防止船舶污染及人命救助的現代化海事監管模式[1]。
電子巡航是海事管理機構對水上交通安全進行遠程監管的重要方式之一[2],主要應用于轄區水域和船舶監控、交通組織和維護、預警信息發布、應急處置和船舶糾違等海事日常監管工作。
相比于傳統的巡邏艇水域巡航,電子巡航具備巡航限制條件少、應急速度快、成本較小等優點。當巡邏艇、無人機等海事設備在惡劣天氣無法出動時,只要保證電子巡航系統相關設備保持正常運行,電子巡航就成為海事管理機構開展通航管理和應急救助等工作較為可靠的手段,同時在一定程度上減少了不必要的輪艇燃油消耗和人力成本。
2 黃浦江水域電子巡航智能監管中存在的問題
2.1 電子巡航智能感知風險能力不足
黃浦江水域狹長、彎頭多、支流港多、船舶流量大,加之作業碼頭、輪渡線、橋梁等各類通航風險因素交織,指揮中心電子巡航員需要24 h不間斷關注轄區水域和船舶,觀察和評估轄區船舶通航狀況,并采取針對性措施。電子巡航仍處于“人盯死守”的階段,智能風險識別、自動預警顯示和船舶數據集成分析等功能未能有效開發使用,智能感知風險能力仍有待進一步提高。
2.2 當前電子巡航工作消耗較大人力
電子巡航員不僅要通過全面巡航、重點巡航持續排查轄區風險隱患,而且要兼顧惡劣天氣預警預控、應急響應、傷病救助等其他事項,日常電子巡航工作強度較大,仍需要消耗較多的執法精力,而當前電子巡航系統在輔助執法人員監管、決策等方面未能充分發揮其智能化監管的優勢。
3 黃浦江水域電子巡航分級預警監管模式探索
本文以閔行海事局西渡海巡執法大隊轄區(從搖車港至閔行電廠)作為研究對象,探索適合轄區實際的黃浦江水域電子巡航分級預警監管模式。
3.1 網格化管理
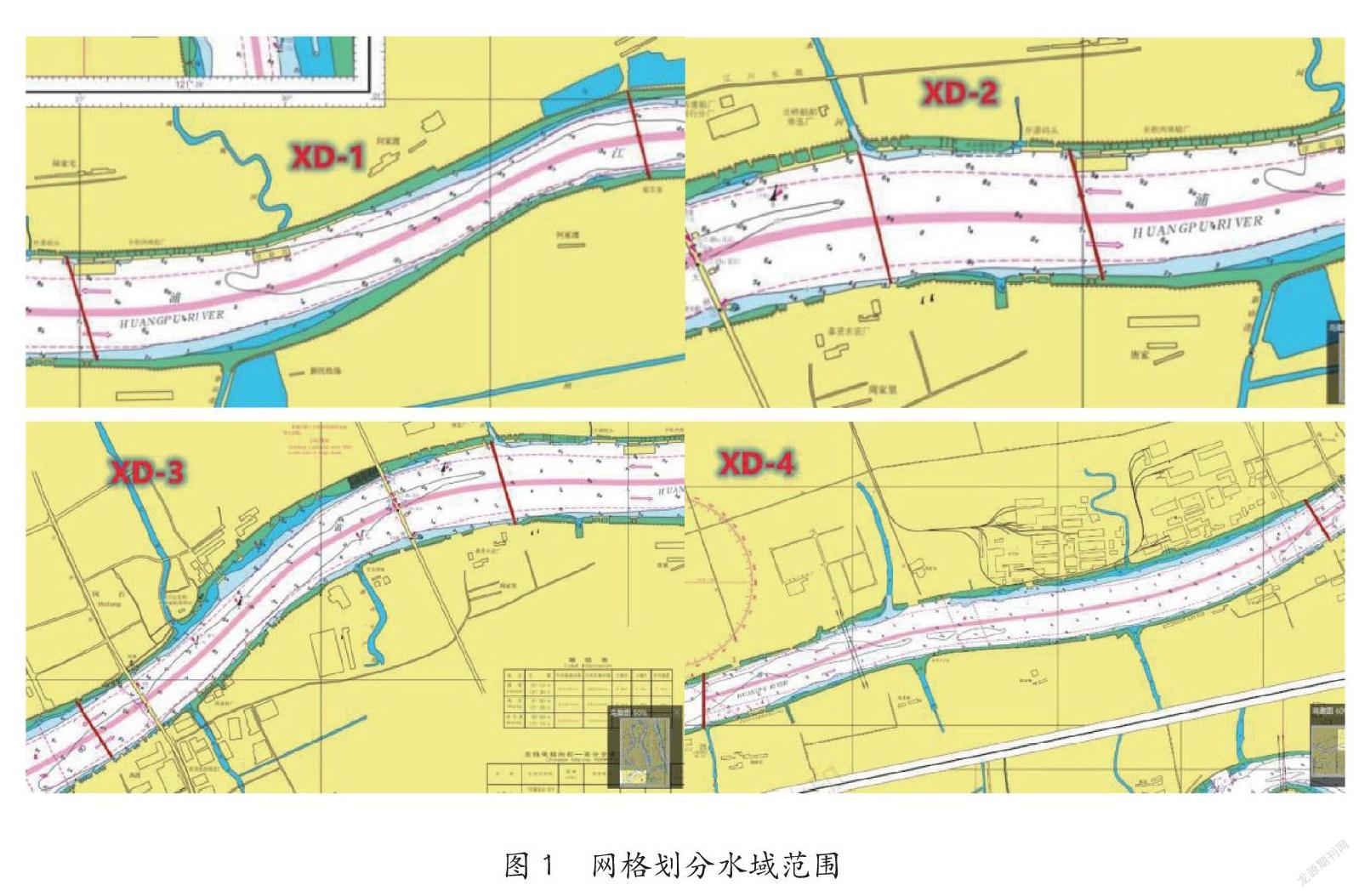
根據研究水域的碼頭、橋梁、支流港的分布情況以及航道通航特點,同時結合監管實際,將轄區劃分為4個網格,每個網格對應上行航道、下行航道2個分區,從而實現對網格內的船舶動態監管的統一標準,如圖1所示。
網格一:XD-1網格位于搖車港至開源碼頭下角與俊光碼頭下角連線間水域,航道總長約2 175 m。網格內無作業碼頭。
網格二:XD-2網格位于開源碼頭下角與俊光碼頭下角連線至淡水河口上口至對開水域連線間水域,航道總長約700 m。網格內作業碼頭5家,支流港1個。
網格三:XD-3網格位于奉浦大橋下游500 m至閔浦二橋上游500 m之間水域,航道總長約2 500 m。網格內作業碼頭7家,跨江橋梁3座(5座橋墩)。
網格四:XD-4網格位于閔浦二橋上游500 m至閔行發電廠上游邊界與巨潮港上口連線之間的水域,航道總長約4 800 m。網格內作業碼頭5家,支流港2個,跨江橋梁1座(1座橋墩)。
3.2 多級預警管控設計
3.2.1 船舶領域理論
船舶領域理論是1963年日本的藤井彌平教授提出的,指船舶為保證航行安全所需的安全水域,其他船舶進入該水域時會產生緊迫局面。該領域模型是以船舶為中心,長半軸沿船舶首尾線方向、短半軸沿正橫方向的橢圓[3]。通常情況下,在內河航道通過能力計算中,建議船舶領域的長軸長度取1.5~4.0 L,短軸長度取 0.4~1.0 L[4],L為標準船長。
黃浦江上游水域小型船舶較多,與內河水域相似,同時考慮到實際航行中船舶受流速、風速以及其他因素的影響,因此基于船舶領域理論,將黃浦江水域航行的船舶領域長軸長度取為2~3 L,即在長軸方向的安全間距S=1~2 L,如圖2所示。結合船舶流量監控數據及日常監管實際,設置電子巡航系統預警信號規則如下:
(1)船舶間距S≧2 L,系統顯示藍色(常態)預警信號。
(2)船舶間距2L>S≧1 L,系統顯示黃色(警示)預警信號。
(3)船舶間距1L>S,系統顯示紅色(擁堵)預警信號。
3.2.2 風險因素分析及預警參數設計
對網格內風險因素分析并結合船舶流量監管實際,選取合適的標準船長L。
XD-1網格內主要風險是航道在白廟港下游稍微凸向浦北側,下行船舶較易出現反航道航行,閔南船廠少量非法待泊船靠離影響航道正常航行船舶,根據船舶航行實際情況及流監控數據,建議采用單船長度為50 m的標準船長。
XD-2網格內主要風險是船舶靠離碼頭、橫越航道的情況較多,進出淡水河口的渣土運輸船與其他船舶的交叉會遇頻次高,以及緊鄰奉浦大橋橋區水域,船舶進入橋區前調整的緩沖距離有限,建議增大標準船長至70 m。
XD-3網格內主要風險是船舶碰撞橋梁、客渡船越江安全和作業碼頭船舶靠離泊、橫越航道等行為。基于此網格內作業碼頭多、大橋多、客渡船橫越航道頻繁和水上施工的影響,建議采用增大標準船長至80 m,并按照上行航道兩列并排航行、下行航道單排航行的實際管控要求分別設置預警參數。
XD-4網格內航道基本呈直線延伸,基于此網格內碼頭分布分散、航道較寬的實際情況以及船舶流監控數據,建議采用單船長度為50 m的標準船長。
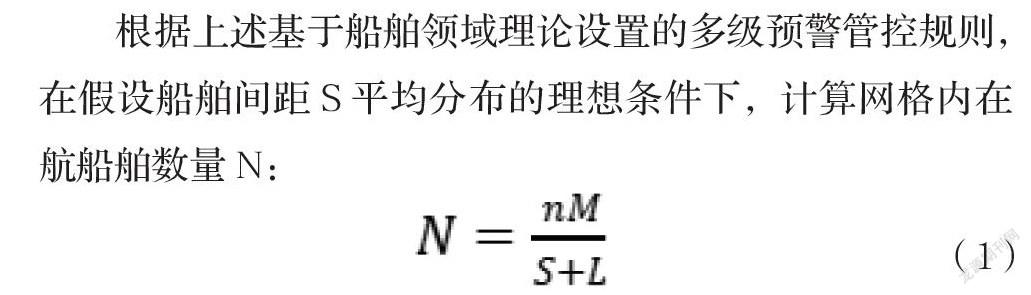
根據上述基于船舶領域理論設置的多級預警管控規則,在假設船舶間距S平均分布的理想條件下,計算網格內在航船舶數量N:
(1)
式(1)中:M為航道總長度,n為船舶并排航行最大列數,相關預警參數設計見表1。通過網格內在航船舶數量的多少即可快速、簡潔、直觀地反映出航道內的擁堵程度和安全狀況,為海事執法人員提供相應預警提示,輔助執法人員開展管控決策。
3.3 針對性管控措施
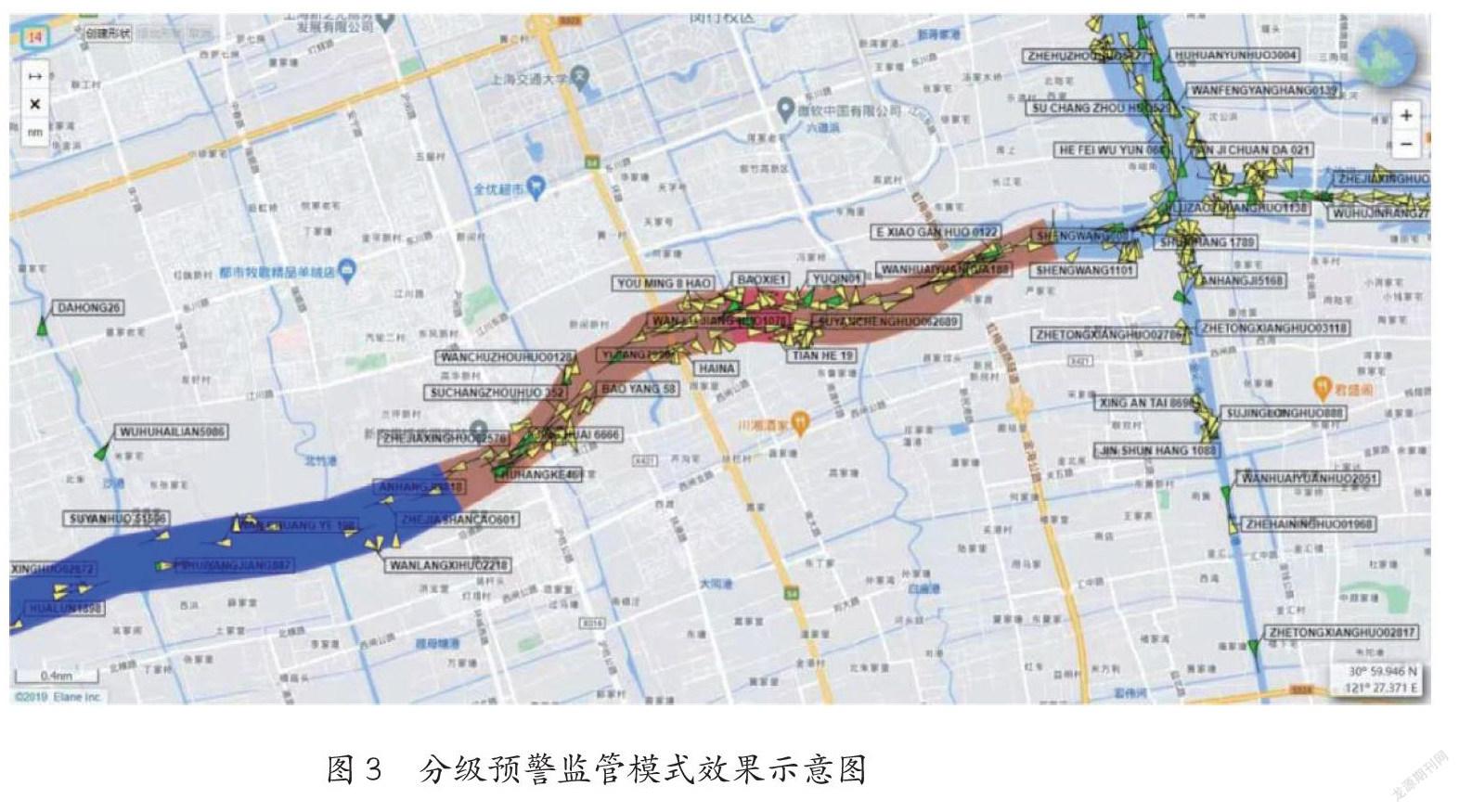
將以上預警規則接入電子巡航系統,通過電子巡航系統智能識別不同網格內的船舶AIS數量,當航道內船舶數量達到設定的閾值,且為了防止偶發的船舶AIS信號跳躍導致系統誤判,持續時間在1~3 min以上時,即分別顯示藍色(常態)、黃色(警示)、紅色(擁堵)等不同等級預警,通過視覺信號的形式顯示網格內的風險屬性,實時提醒海事管理機構值班人員對相應水域進行關注和監管,分級預警監管模式如圖3所示。
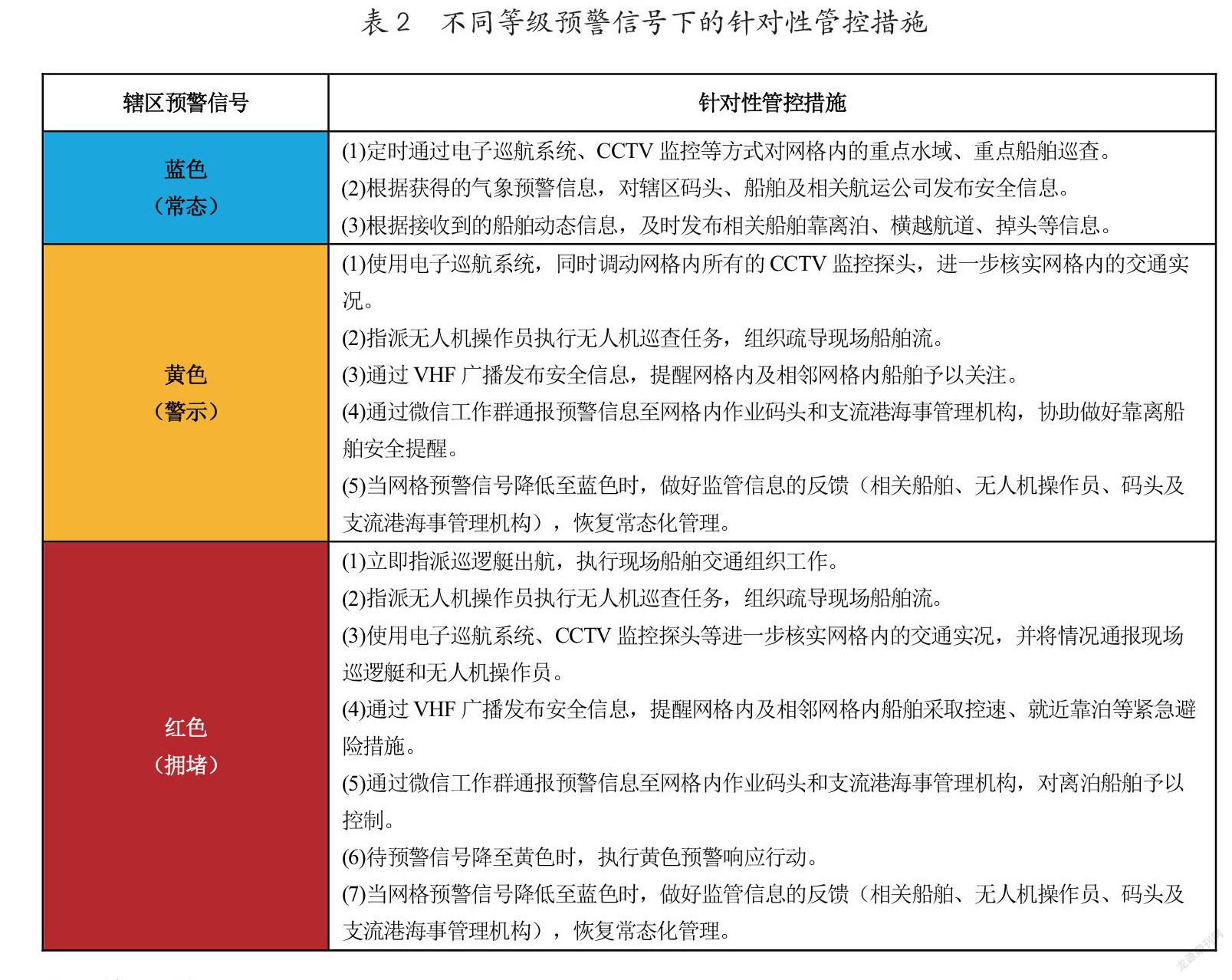
值班人員根據預警風險等級的高低(紅色〉黃色〉藍色),優先對風險等級高的網格區域采取相應的針對性監管措施(見表2),從而對風險狀況及早預警和處置,實現海事安全監管的閉環管理。
4 結 語
電子巡航分級預警監管模式能夠輔助海事管理機構電子巡航人員更加快速、直觀地感知轄區船舶整體狀況并采取應對措施,使電子巡航由“人工巡航”逐步向“系統智能巡航”轉變,同時該模式具有可復制性,在黃浦江其他水域或者水域環境等影響因子發生變化時,調整相應的算法即可重新設定預警規則,實現電子巡航系統預警提醒的不斷優化。
在上述電子巡航分級預警監管模式的基礎上,未來可將黃浦江船舶流管控、船舶監管和碼頭作業等數據陸續接入電子巡航系統,通過大數據采集和分析,記錄船舶航行習慣、碼頭動靜態計劃,建設通航數據庫,對船舶的航行、碼頭作業形成預報和提示[5],實現對黃浦江船舶動態的精準掌控,對風險狀況及早預警并采取應對措施,最終形成“多維感知、高效協同、智能處置”的現代化、智能化水上交通動態管控新格局。
參考文獻
[1] 論海事電子巡航與現場巡航融合[A].李國寅,韋鵬獻,胡棟科.2020年海事管理學術年會優秀論文集[C].2020.
[2] 梁泓.海事監管中的電子巡航應用問題與對策[J].世界海運,2021,(309):32-35.
[3] 林曉梁,劉棟.基于船舶領域理論在船舶通航安全中的研究——以圓圓沙警戒區為例[J].中國水運,2021,(10):5-6.
[4] 陳愷,張瑋,李瀛.基于船舶交通流的內河航道通過能力研究[J].中國水運,2012,(12):38-40.
[5] 王筱竹.基于電子巡航的黃浦江海事動態監管模式研究與實踐[J].中國海事,2016,(8):44-46.
作者簡介:
鄭丕顯,碩士研究生,閔行海事局指揮中心副主任,主要從事船舶通航管理相關工作,(E—mail)1147725145@qq.com,13761802803