基于BP-AdaBoost模型的雷達工作狀態識別方法
2022-06-22 06:08:00陸滿君張文旭胡建波
制導與引信 2022年1期
關鍵詞:模型
秦 濤, 陸滿君, 張文旭, 胡建波
(1.哈爾濱工程大學信息與通信工程學院,黑龍江 哈爾濱 150001;2.上海無線電設備研究所,上海 201109;3.中國人民解放軍91411部隊,遼寧 大連 116041)
0 引言
在軍事領域愈來愈看重作戰信息的背景下,雷達技術迎來了關鍵性發展階段。其中多功能雷達以其功能靈活多變、狀態切換敏捷的特點獲得了廣泛關注。在電子戰雙方均缺乏足夠有效作戰信息的大背景下,偵察機截獲雷達輻射源信號,提取信號特征參數,對其加以分析,可以挖掘出輻射源對應的雷達型號及工作模式,為評估戰爭態勢、調整作戰策略提供重要技術保障。
雷達工作狀態識別與模式分類有著緊密的聯系。賈朝文等提出通過掃描幅度,判別雷達是相掃雷達還是機掃雷達,再利用脈沖描述字構建相干處理間隔(coherent processing interval,CPI)矩陣進行特征關聯,進一步判斷雷達威脅等級,對雷達工作狀態進行識別。陳卓對相控陣雷達的各個子模塊進行了系統性建模,通過研究基于天線掃描幅度的值特征,對雷達不同工作狀態進行識別。李輝在對機載相控陣雷達重點子模塊建模過程中,構建目標與雷達的典型運動場景,對接收的全脈沖數據進行多層次建模,利用去噪自動編碼器對雷達工作模式進行識別。方佳璐對降噪分選后的雷達輻射源信號進行窗口劃分,基于窗口序列實現對雷達工作模式的動態識別。ARIK等提出了一種智能認知模型,利用聚類算法對輻射源信號的脈沖描述字進行識別,進而通過人工神經網絡(artificial neural network,ANN)生成干擾策略。除此之外,反向傳播神經網絡(back propagation neural network,BPNN)、概率神經網絡(probabilistic neural network,PNN)等同樣被廣泛應用于雷達工作狀態識別。
如何利用已有的算法得到更好的狀態識別效果,集成學習是一種思路。集成學習屬于機器學習領域,核心思想是將已有算法組裝結合。常見的集成學習方法包括Bagging、Boosting以及Stacking等方法。王艷麗將并行Boosting算法與神經網絡結合,降低學習的計算復雜度。仿真結果表明該方法能夠大幅提高弱分類器算法的識別率。孫藝聰等利用Bagging算法并行訓練若干卷積神經網絡,并將它們融合起來對雷達信號的模糊函數特征進行分類識別。仿真結果表明,該方法在信噪比-2 dB時識別率達到85%,對低信噪比條件下的雷達輻射信號適應性較強。蔣雅萍在分布式環境下將集成思想中的Stacking算法與邏輯斯諦回歸模型進行關聯融合,進一步提取雷達輻射源信號中的特征,對4種工作狀態進行了有效識別。侯超將支持向量機(support vector machine,SVM)算法與AdaBoost算法相結合,提出AdaBoost-SVM融合算法,對多種信噪比條件下的雷達輻射源信號數據集進行了測試,得到了最優的模式識別模型。
另一方面,雷達狀態的識別率還受到特征參數重疊的影響。上述文獻均未解決這一問題。本文采用AdaBoost算法對BPNN進行集成,以改善因雷達信號參數重疊造成的識別率下降問題。
1 BPNN
BPNN包含信號的正向傳播過程和誤差的反向傳播過程,是一種多層前饋網絡。正向傳播過程就是信號從輸入層逐層傳遞到輸出層的過程,最后一層輸出值作為算法預測值,層與層之間的神經元互不影響。此外,為了取得最優參數組合從而得到期望輸出,BPNN會訓練和更新神經元之間的連接權重和閾值,逐層更新參數,以便不斷向期望輸出靠近。該更新權重和閾值的過程即為反向傳播過程。實際上,導數鏈式法則貫穿于反向傳播過程中,依據損失函數對各參數的梯度來進行參數的更新。反向傳播的輸入可以看作是BPNN預測值與實際值的誤差,反向傳播的輸出是更新后的參數。BPNN的拓撲結構如圖1所示。
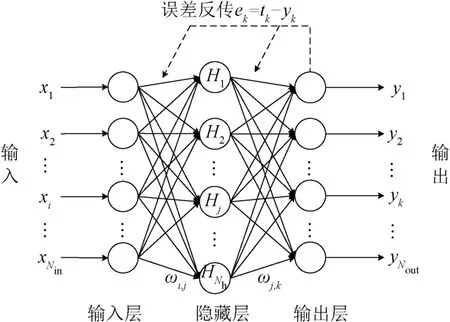
圖1 BPNN結構示意圖
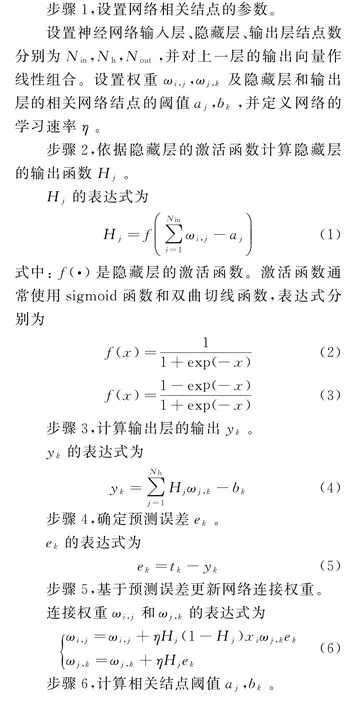
圖1中,BPNN只包含一個隱藏層,輸入層、隱藏層和輸出層的神經元數量分別為,和。,,…,x,…,x表示輸入層的輸入,,,…,H,…,H表示隱藏層的輸出,,,…,y,…,y表示輸出層的輸出。輸入層、隱藏層和輸出層的神經元編號分別為1,2,…,,1,2,…,,1,2,…,。ω,是輸入層第個結點到隱藏層第個結點的連接權重,ω是隱藏層第個結點到輸出層第個結點的連接權重,t是BPNN輸出層第個結點的期望輸出,e=t-y是網絡預測誤差。BPNN的訓練步驟如下。

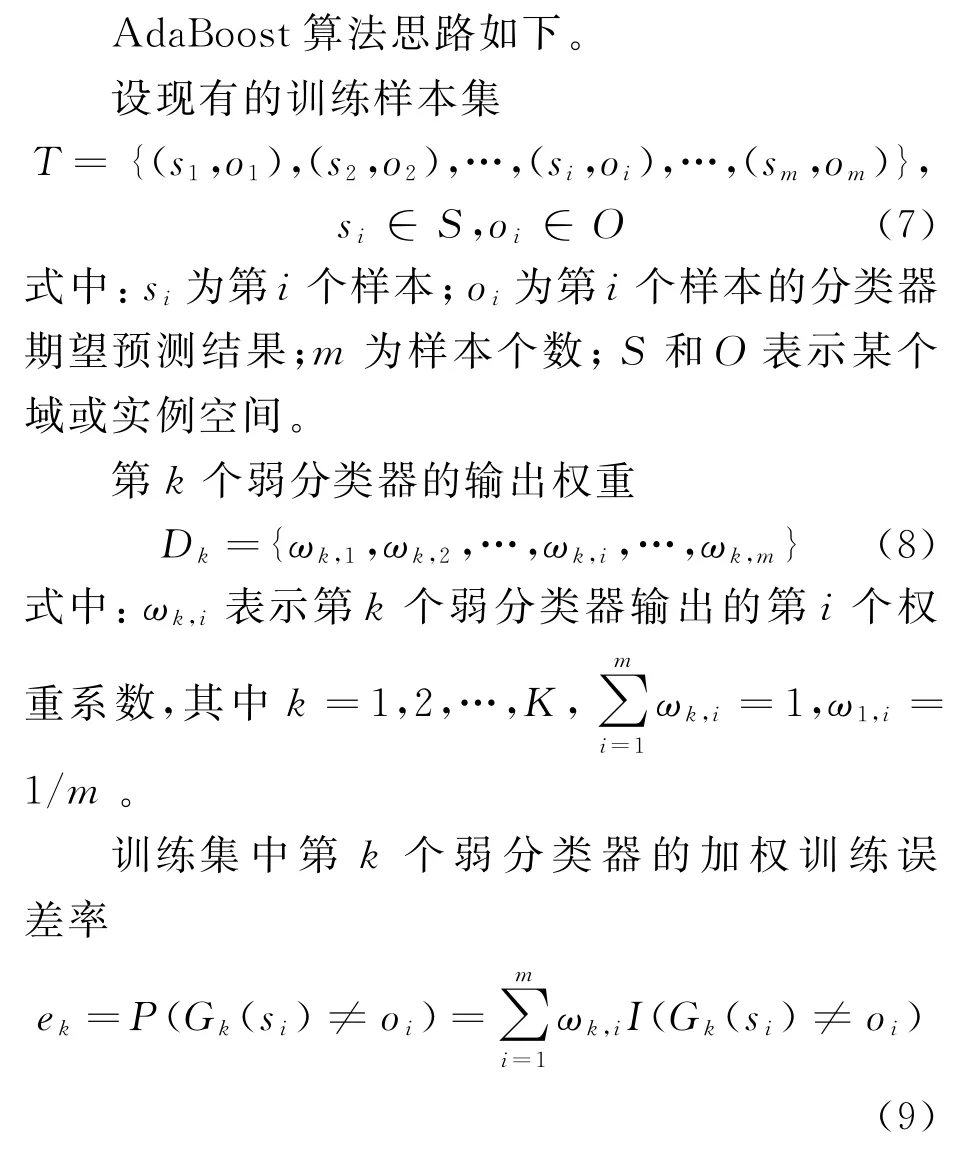
2 AdaBoost算法
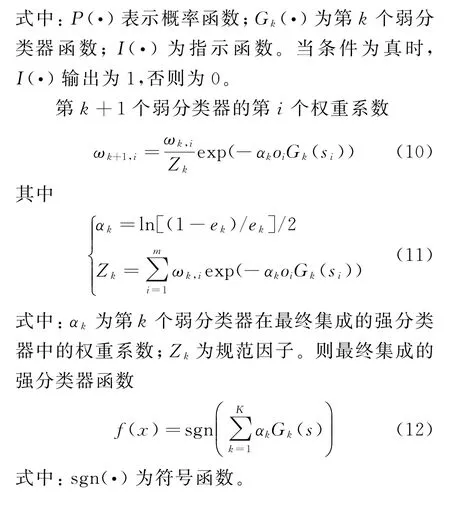
AdaBoost算法的主要思想是利用訓練集中的若干組數據訓練若干個弱分類器,根據集成思想用這些弱分類器組集成實現一個強分類器。AdaBoost算法通過改變數據分布來實現集成目的。每個樣本的權重是根據迭代過程中一般分類的精度和每個訓練序列中每個樣本的準確分級來確定的,賦予訓練效果差的樣本以及分類效果好的弱分類器更大權重。對若干個弱分類器進行加權處理,實時調整加權系數,利用多輪訓練將這些弱分類器組合成為強分類器。算法流程如圖2所示,其中為弱分類器個數。

圖2 AdaBoost算法流程圖
3 BP-AdaBoost模型
在AdaBoost算法中增加一個弱分類器,用于更新BP神經網絡,即可構成BP-AdaBoost模型。BP-AdaBoost模型通過神經網絡預測樣本性能,并利用AdaBoost集成思想實現強分類器。BP-AdaBoost模型流程如圖3所示。

圖3 BP-AdaBoost模型流程圖
BP-AdaBoost模型的計算過程如下。
隨機選取個樣本構成訓練數據集,配置樣本權重分布,根據樣本數據集制定初始網絡的基本結構,如網絡層數和輸入輸出維度等,初始化網絡的權重和閾值。用AdaBoost算法訓練個網絡,對樣本值歸一化,使其分布在 [0,1]區間。設D()表示第次迭代中樣本的權重,其中1,2,…,,1,2,…,,為迭代次數。令1,初始化個樣本的分布權重都是1/,即()1/。當初始網絡學習結束后,依據樣本預測誤差更新樣本權重和的權重。重復上述步驟,直至迭代次數達到。
依據次迭代的分類器函數N()和網絡權重()進行分類。則最終集成的強分類器函數

4 仿真分析
假設機載多功能相控陣雷達在執行空空作戰任務時有6種工作狀態:非合作目標識別、校準/自動增益控制、氣象規避、火炮測距、空中數據鏈路和中重頻。為簡單起見,將上述6種工作狀態分別記為S1,S2,S3,S4,S5和S6。
仿真數據引自文獻[12],雷達狀態特征參數樣本如圖4所示。采用5種脈沖特征參數,包括脈沖重復頻率(PRF)、脈沖寬度(PW)、占空比(DR)、脈沖壓縮比(PC)和瞬時帶寬(IB),建立脈沖描述字模型[PRF,PW,DR,PC,IB]。

圖4 雷達狀態特征參數樣本
訓練樣本設置了6個標簽對應S1~S6,每個標簽對應200組數據,共1 200組數據。訓練結束后,隨機選取600組數據作為測試樣本,利用Matlab 2020a軟件仿真測試BP-AdaBoost模型對雷達工作狀態識別的準確性。
BP-AdaBoost模型對6種雷達工作狀態的識別率如表1所示,平均正確識別率為96.7%。

表1 6種雷達工作狀態的識別率
BP-AdaBoost思想是形成一個由若干弱分類器組成的強分類器。對弱分類器及其集成的強分類器的預測性能進行對比,預測誤差如圖5所示。定義預測誤差絕對值為預測類別與實際類別差值的絕對值。由于有6種雷達工作狀態,預測誤差的絕對值在0到5之間。可知,強分類器的預測誤差絕對值在0~2之間變化,而弱分類器的預測誤差絕對值在0~6之間變化,強分類器有更小的預測誤差,容錯率更高。這證明AdaBoost算法優化了BPNN的分類效果,減小了最終的誤差。
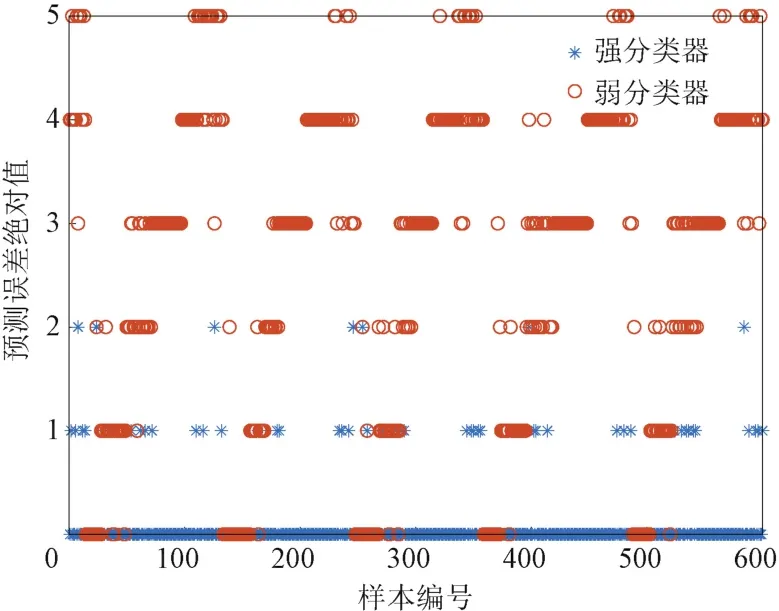
圖5 強弱分類器識別預測誤差對比
噪聲引起的測量誤差是仿真實驗中重點考慮的影響因素。為了驗證本文方法在各種測量誤差條件下的性能,設定噪聲引起的測量誤差按5%步進,從0%逐步增加到30%,進行仿真實驗。不同測量誤差下,BP-AdaBoost模型對6種雷達工作狀態的識別率如圖6所示。狀態S1~S5的識別率集中在95%~100%,且不隨誤差的增加而顯著變化,狀態S6的識別率隨誤差的增加變化趨勢明顯。狀態S2與S4的識別率曲線重疊,S1與S5的識別率曲線重疊。狀態S6中重頻狀態的識別率隨著誤差的增加而急劇下降,當參數測量誤差超過25%時,識別率下降到60%以下。這是因為中重頻狀態的參數重疊最嚴重,導致參數錯誤下的識別率迅速下降。
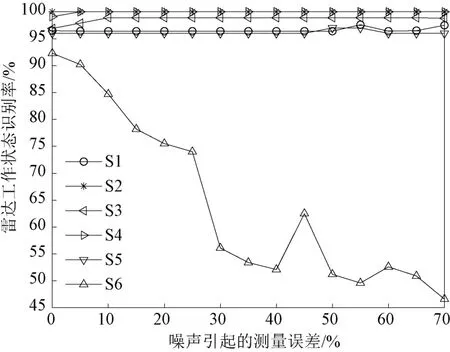
圖6 不同測量誤差下AdaBoost模型的識別率
BPNN分類器的分類效果如圖7所示,其中所有數據點被劃分為6個類別。可以看到單個BPNN分類器的識別效果并不差,但與BPAdaBoost分類器相比仍然存在一定差距,圖中有大量的預測值偏離實際值。
存在噪聲影響時,不同測量誤差下BP-AdaBoost、BPNN和PNN 3種方法的平均識
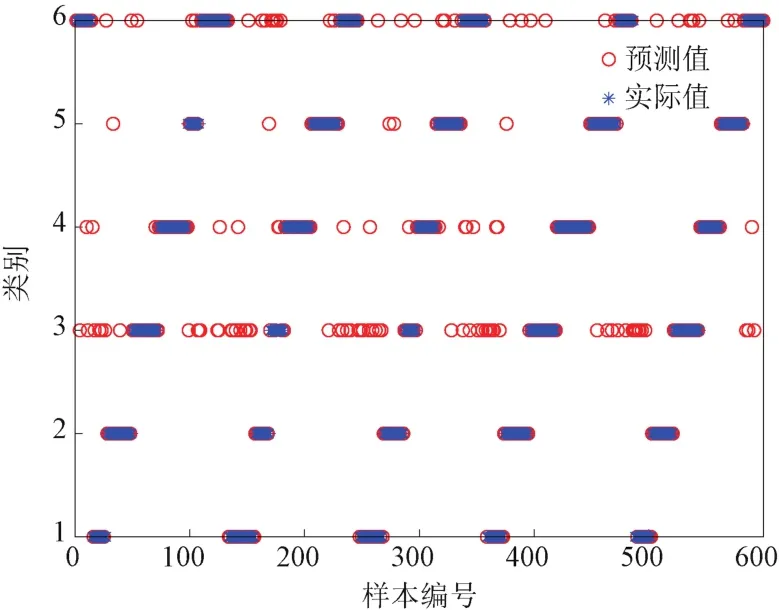
圖7 BPNN的分類效果
別率曲線如圖8所示。當沒有噪聲引起的測量誤差時,BP-AdaBoost模型平均識別率高出PNN算法5%以上,高出BPNN算法10%以上,達到95%。隨著噪聲引起的測量誤差增加到25%,BP-AdaBoost模型的識別準確率緩慢下降,而BPNN算法的識別率保持穩定。當測量誤差增大到30%時,BP-AdaBoost模型識別準確率與BPNN算法相當。總體上BP-AdaBoost模型的平均識別率高于PNN與BPNN算法。

圖8 不同測量誤差下BP-AdaBoost、PNN、BPNN的平均識別率對比
5 結論
本文利用BP-AdaBoost模型,將BPNN與AdaBoost算法相結合,克服了雷達信號參數重疊導致的識別率下降問題。該模型使用多個BPNN分類器作為弱分類器,然后將它們組合成最終的強分類器。實驗中采用5種信號特征參數來描述機載多功能相控陣雷達的6種工作狀態,分類器的識別率得到顯著提高。強分類器與弱分類器的識別效果對比仿真實驗表明,BP-AdaBoost模型的強分類器識別效果優于弱分類器。此外,與BPNN和PNN等傳統方法相比,BP-AdaBoost模型顯著改善了識別過程,提高了識別率。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
