改進的強地雜波環境下車輛目標鑒別方法
2022-06-22 06:07:58蔚宏軒于祥禎王樹文
制導與引信 2022年1期
蔚宏軒, 蔡 猛, 于祥禎, 王樹文
(上海無線電設備研究所,上海 201109)
0 引言
合成孔徑雷達(synthetic aperture radar,SAR)能夠全天時、全天候地對目標進行主動高分辨成像,可以提供豐富的目標信息[1]。SAR圖像車輛目標鑒別作為SAR圖像車輛目標檢測的后續處理步驟,主要任務是在保留目標區域的同時,盡可能地剔除雜波,進而降低后續不同種類車輛目標鑒別的計算復雜度[2]。
復雜地物背景下較小尺寸車輛目標的檢測和鑒別始終是SAR圖像目標鑒別研究領域的熱點和難點[3]。SAR圖像車輛目標鑒別首先需要進行目標檢測,通常根據SAR圖像背景中的地物雜波統計模型,采用相應的恒虛警率(constant false alarm rate,CFAR)檢測算法實現。目前常用的CFAR算法主要包括單元平均恒虛警率(cell average CFAR,CA-CFAR)算法,基于CA-CFAR算法改進得到的單元平均選大恒虛警率(greatest of CFAR,GO-CFAR)算法和單元平均選小恒虛警率(smallest of CFAR,SO-CFAR)算法,基于統計排序的類恒虛警率(order statistics CFAR,OS-CFAR)算法,以及開關型恒虛警率(switching CFAR,S-CFAR)算法[4]等。但由于CFAR檢測是一種次優的異常檢測算法[5],通常情況下SAR圖像場景中地物組成較為復雜,會導致檢測結果受到雜波干擾而產生虛警,且虛警目標的數量與面積占比很可能遠大于潛在車輛目標的數量與面積占比,因此在目標鑒別階段需要結合目標感興趣區域(region of interest,ROI)的紋理特征,即ROI內目標像素散射強度的起伏,進行預篩選,完成雜波虛警抑制,提高目標鑒別性能與效率。
特征提取與選擇是影響SAR圖像目標鑒別性能的重要因素[6]。NOVAK等[7]提取機動目標二值化圖像的Hausdorff分形維數作為目標鑒別的候選特征,并設定車輛目標的Hausdorff維數小于自然地物。但是由于Hausdorff維數未考慮目標像素散射強度的起伏特性以及像素的空間分布,無法描述場景中目標像素散射起伏的快慢,因此將Hausdorff維數作為一種車輛目標鑒別的特征將導致較高的虛警率。另外SAR圖像受相干斑噪聲影響,會產生更高的虛警率,需要采用魯棒性更好的分形特征提高目標檢測和鑒別性能。國內部分學者將另一種高階分形特征——間隙度特征引入到SAR圖像車輛目標鑒別中[8-10]。該特征可定量描述SAR圖像中目標像素散射起伏的劇烈程度,以及車輛目標與地物背景的間隙尺寸,彌補Hausdorff維數等分形特征的不足。但文獻[10]僅應用了ROI切片中區域目標像素散射強度的方差作為車輛目標間隙度特征的影響變量,當車輛目標不在切片中心時,將導致間隙度特征產生劇烈波動,與地物雜波特征混淆。
本文針對強地雜波背景下SAR圖像的車輛目標鑒別,提出了一種基于變化檢測量閾值分割和二維像素間隙度特征的車輛目標鑒別方法,并對裝甲車、卡車、坦克等不同車輛的SAR圖像數據進行仿真,驗證目標鑒別算法的有效性。
1 強地雜波下SAR圖像中車輛目標鑒別
1.1 目標鑒別算法流程
針對現有特征提取與選擇方法在SAR圖像車輛目標鑒別過程中存在的不足,應用像素散射強度變化特征對SAR場景中的潛在車輛目標的鑒別可信度進行排序,并以雜波區域的鑒別可信度作為參照。由于SAR圖像不同區域像素的灰度存在差異,根據SAR圖像灰度對場景進行閉運算處理,可以有效區分不同散射強度的目標區域和雜波區域。目標由于其材料、結構等因素,能更有效地反射SAR電磁波,在SAR圖像中表現為灰度較大的亮區域;而雜波對于SAR電磁波主要為漫反射,在SAR圖像中表現為灰度較小的暗區域。因此對于每一幅SAR圖像都存在一個閾值,可用于目標區域與雜波區域的區分。
本文所提的目標鑒別算法流程如圖1所示。首先根據輸入SAR圖像中像素的灰度分布,選取適當的參考圖像與平移圖像,對整幅圖像進行自適應閾值提取,并根據閾值求取結果對圖像進行基于變化檢測量的二值化篩選,剔除因雜波導致的虛警目標;再提取篩選后二值圖像中的1連通域作為ROI切片,根據像素散射強度的起伏變化與分布特征,計算ROI切片中的二維像素間隙度特征向量;最后應用該向量計算ROI切片的目標鑒別可信度并排序,實現車輛目標鑒別。
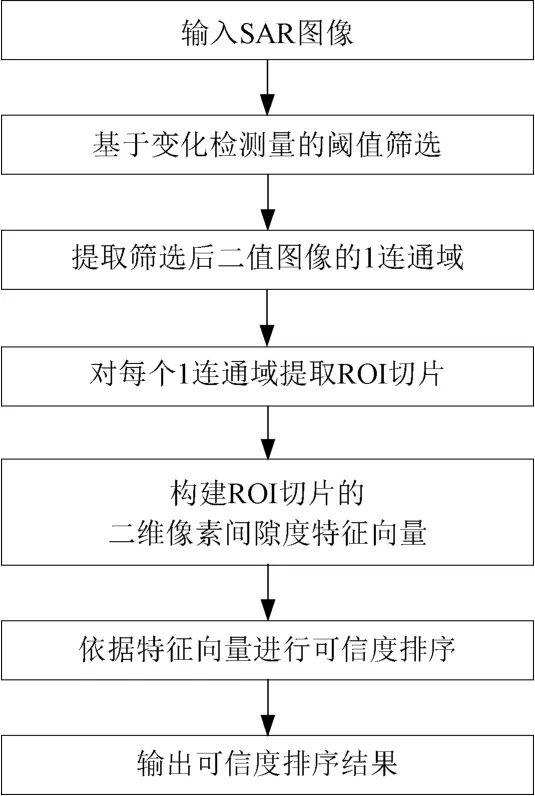
圖1 目標鑒別算法流程圖
1.2 基于變化檢測量的像素閾值提取
從SAR圖像目標場景中提取ROI切片,首先要得到車輛目標的概略位置。應用閾值分割方法可以生成切片的二值圖像,區分背景雜波與車輛目標。在本文中用到的基于變化檢測量的閾值分割方法原理是:首先利用SAR圖像灰度數據構建變化檢測量,生成標準灰度差異圖像;再利用標準灰度差異圖像的直方圖特征計算出標準灰度差異圖像中變化與未變化像素的閾值;最后利用該閾值來確定車輛目標預篩選的最終閾值,實現對SAR圖像車輛目標的預篩選。
提取像素灰度閾值時,首先在ROI切片四周建立隔離區,并將ROI中心塊作為參考圖像。將參考圖像分別向左上、左下、右上、右下4個方向平移,平移距離不超過隔離區寬度,得到4幅平移圖像。計算第k幅參考圖像像素灰度的似然比變化檢測量
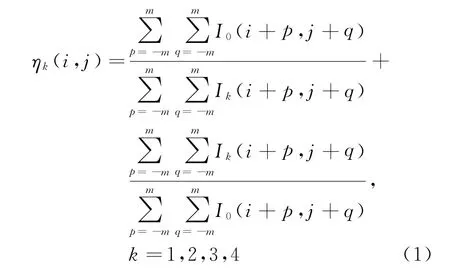
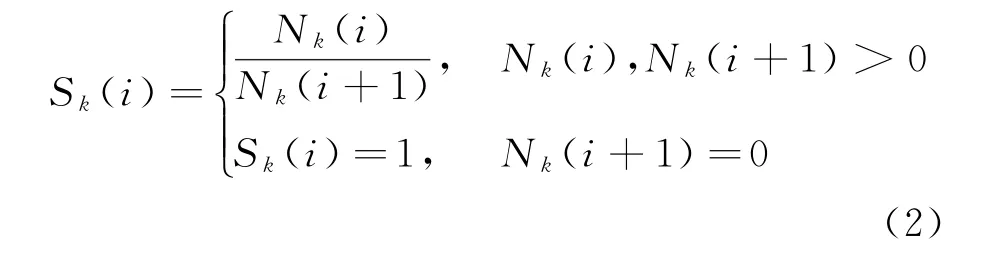
式中:i,j為圖像的像素坐標;m=(M-1)/2為雜波區域寬度,其中M為對每一個像素計算似然比變化檢測量的窗口的大小;I0(·)為參考圖像的像素灰度;Ik(·)為第k幅平移圖像的像素灰度。將像素灰度似然比變化檢測量線性變換至區間[0,255],得到第k幅標準灰度差異圖像Dk,并繪制其像素灰度直方圖。Tk_max表示出現次數最多的像素灰度值,在直方圖上統計 [Tk_max,255]區間每個灰度值的數目Nk(i),其中i為灰度值編號。計算區間[Tk_max,255]內相鄰灰度值數目的比值Sk(i),并將第一個滿足Sk(i)<1的像素所對應的灰度值作為初始像素灰度閾值Tk_0。Sk(i)的計算公式為
統計灰度值在區間[Tk_0,255]內的像素數目,即第k幅標準灰度差異圖像Dk中發生變化的像素數目Ck_ch。
在原始切片的直方圖中從灰度值255開始向下搜索,當下降到某一灰度值Gk_0時,若區間[Gk_0,255]內所有像素數目Ck_whole滿足Ck_whole>Ck_ch,則認為第k幅標準灰度差異圖像的預篩選閾值Tk=Gk_0。
根據4幅標準差異圖像即可得到最終閾值

式中:round(·)表示向下取整函數,即當閾值計算結果含小數時,舍去小數部分。
用最終閾值T對每一幅切片的像素進行預篩選,灰度值大于最終閾值T的像素賦值為1,否則為0,得到對應二值圖像。在二值圖像中賦值為1的像素即判定為車輛目標。由于在切片中車輛目標位于中心位置,因此根據二值圖像得到車輛目標在切片中的邊界,并對目標圖像按分辨率抽取,以提升后續處理的計算效率。
1.3 構建二維像素間隙度特征向量
車輛目標具有明顯的幾何結構,包括近似為多邊形的邊緣輪廓和目標內部的箱式結構。因此在車輛目標像素集合的邊界區域,像素散射強度有劇烈的起伏波動,并與背景地物區域存在明顯的不同。目標區域像素的散射強度起伏特性和間隙度可以用分形理論來定量描述。間隙度表示ROI切片中不同區域之間的像素灰度值差異。與閾值分割的原理類似,從圖像的灰度直方圖中可以看出不同區域的灰度分布區間之間存在一定的間隙,基于此定義即可得到間隙度特征向量。文獻[8]提出了一種高維分層間隙度特征的提取與計算方法,采用該方法對車輛目標切片進行特征提取,分層方法如圖2所示。取待檢測車輛目標SAR圖像ROI切片,切片圖像大小是邊長為奇數個像素點的正方形。將切片最中間的一個像素點作為第一層,向外以一個像素寬度進行擴展,并取前3層為像素集C1,其后每層為一個像素集,依次記為C2,C3,C4。在計算高維分層間隙度特征時,取中間3層的像素點灰度值的方差作為第一個變量,從第4層開始每一層的像素點方差作為下一個變量。當車輛目標切片有N層時,其像素點方差組成一個1×(N-2)維的向量。
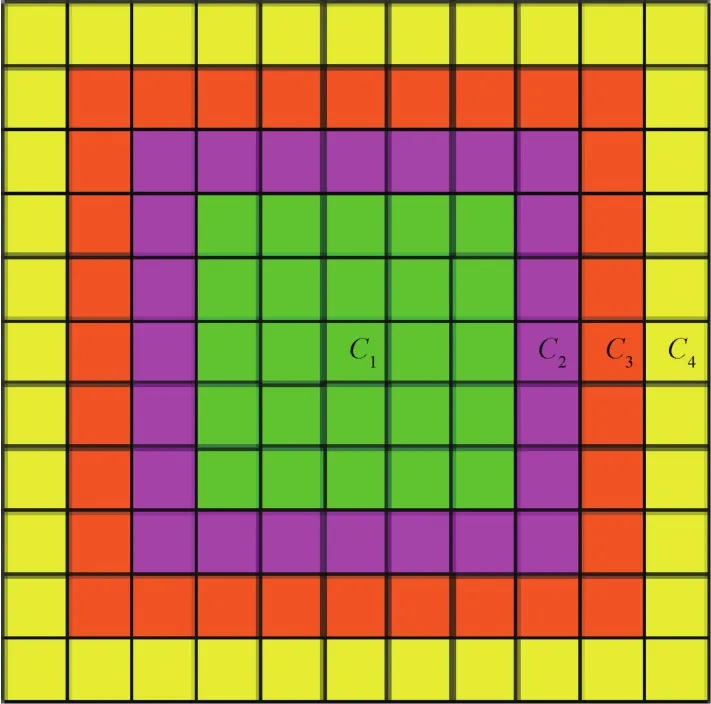
圖2 文獻[8]的切片圖像分層示意圖
上述特征構建方法在SAR圖像本身雜波干擾少、車輛目標相較于背景雜波易區分的情況下,能夠準確地對車輛目標切片進行特征提取和構建。但是若SAR圖像中地雜波干擾較強,將無法正常提取目標切片特征。由于車輛目標經過預篩選后在SAR圖像中所占像素點個數有限,通常為10×10個左右,這將導致按照現有分層方法得到的特征向量長度偏短,難以有效反映出切片中像素灰度的分布情況。同時,由于僅計算像素層灰度的方差,在強雜波環境下若由于成像角度原因導致灰度值未能反映出全部目標散射能量,方差的變化趨勢將無法直觀地反映出切片中車輛目標的灰度分布。
本文提出一種參考差分盒維法[10](differential box-counting,DBC)的方環擴散分層方法,將車輛目標切片中心的4個像素記為第一層,然后由中心向四周擴散分層,每一層寬度為一個像素,每一層像素的集合分別表示為C1,C2,…,CM,其中M=W/2表示切片所能分出的最大層級,W表示切片邊長。取M=5,改進的切片圖像分層示意如圖3所示。
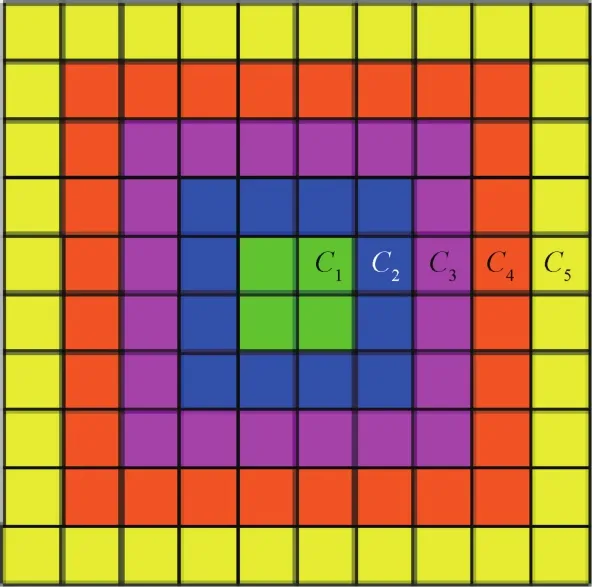
圖3 改進的切片圖像分層示意圖
設SAR圖像車輛目標二維像素間隙度特征向量
式中:H1與H2分別為H的均值子向量與方差子向量;h1j,h2j分別為H1,H2的第j維特征值;Cj為第j層像素集合;mean(·)為求均值函數;var(·)為求方差函數。
與高維分層間隙度特征相比,本文提出的二維像素間隙度特征的優點在于,二維像素間隙度特征向量包含目標切片每一層中像素的均值和方差信息,反映了該切片從中心到四周像素散射強度的變化趨勢。通過更合理的分層方式,用較少的像素點層數即可以避免像素過少導致的誤差。同時在強雜波環境下也可以避免由于篩選后車輛目標像素點數量偏少,導致車輛目標不位于中心圈的情況。而在特征向量中引入方差,也可以使得特征向量更貼近于車輛目標切片中像素本身的散射強度。在強雜波環境下,由于干擾較多,可能導致相鄰層像素灰度值的變化趨勢差異不夠明顯,通過計算從內至外相鄰像素集的灰度變化梯度,難以精確地反映出車輛目標切片的區域組成。而由于車輛目標區域像素點灰度較大,背景雜波區域灰度通常較小,通過計算每一層灰度的均值與方差,能夠更精確地貼合每一層中像素點的構成。
1.4 車輛目標鑒別可信度排序
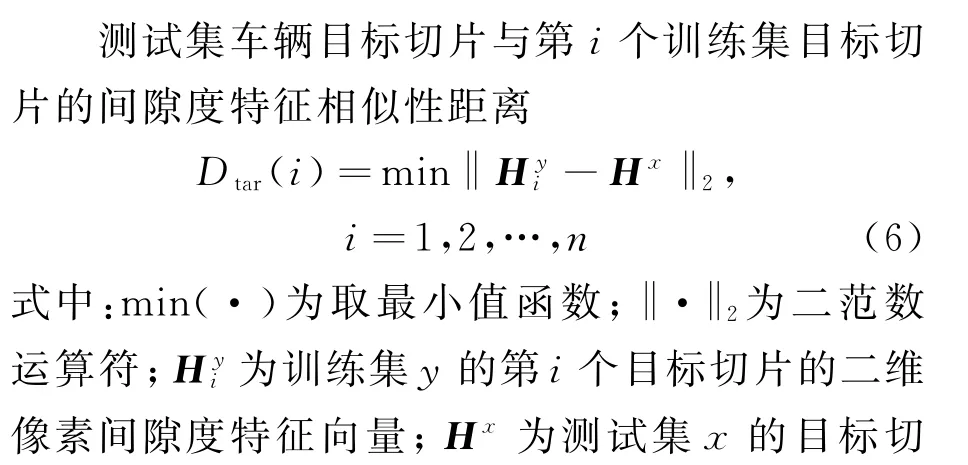
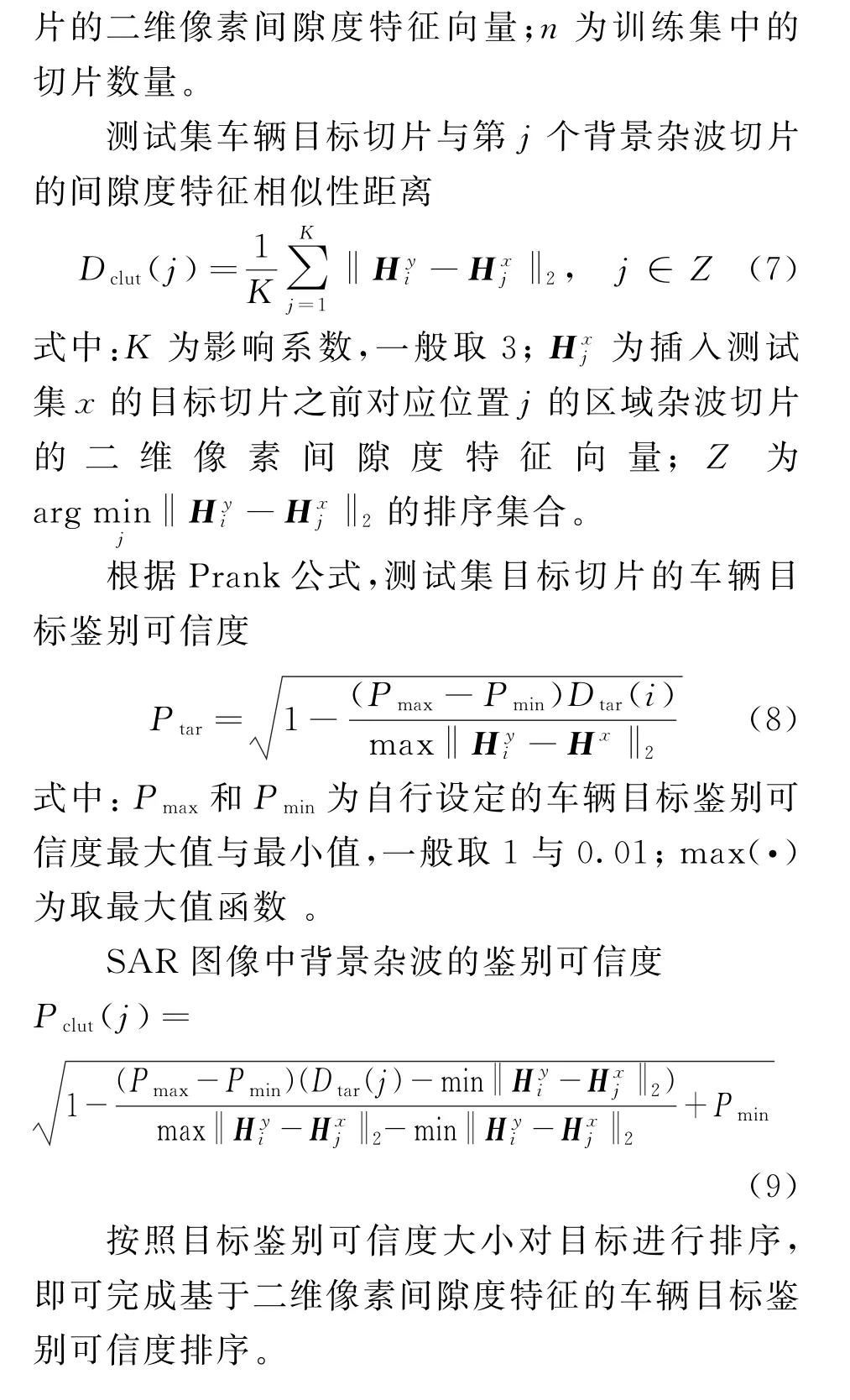
車輛目標鑒別可信度排序是基于賦范線性空間的目標相似性排序。對于車輛目標切片,可用由內向外方環擴散分層法得到二維像素間隙度特征變化規律。特征向量的第一行為每層像素散射強度的均值,由內至外應逐漸變小并趨于穩定(當車輛目標不在切片中心時,由內至外均值應為先變大再變小)。特征向量的第二行為每層像素散射強度的方差,由內至外應由小變大,再變小并趨于平緩。而且特征向量的變化轉折點與目標尺寸相關,特征向量的極值區域出現在目標的最小外接矩形兩邊長像素點個數作為區間的范圍內。目標切片的后向散射強度起伏較大,具有特定尺寸且大小有限;地物背景切片的后向散射強度起伏較小,并且沒有特定尺寸。即使地物背景局部由于其結構突變而形成二面角或三面角等強散射點,也因數量較少且分布稀疏,不會改變地物背景整體統計分布特征[8]。因此其二維像素間隙度特征將隨機變化,沒有特定的變化規律。依據本文提出的改進的二維像素間隙度特征的變化規律,即能對SAR場景中潛在車輛目標的ROI切片進行鑒別,并通過訓練集目標的二維像素間隙度特征進行相似性距離度量,完成潛在車輛目標的鑒別可信度排序。
2 仿真實驗及結果分析
2.1 仿真條件
利用機動監視與目標搜索雷達(mobile surveillance and target acquisition radar,MSTAR)公開的裝甲車(BMP2)、卡車(D7)、主戰坦克(T72)等數據集進行仿真實驗。3類目標的SAR圖像切片示例如圖3所示。數據集中的SAR圖像分辨率為0.3 m×0.3 m,裝甲車和主戰坦克圖像切片尺寸均為128×128個像素,卡車圖像切片尺寸為177×178個像素。實驗選取X波段、HH極化、波束擦地角15°的雷達聚束模式成像數據。在3類車輛目標圖像軸向角0°~360°范圍內,每隔2°取一個切片,選取3類目標各180個切片作為訓練集,各選10個切片作為測試集。
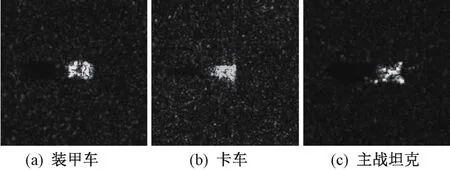
圖3 3類目標的SAR圖像切片
本文利用外場掛飛得到的SAR圖像模擬實驗場景進行仿真實驗。主要場景類別包括:a)丘陵地貌或戈壁灘(典型場景類型為訓練場或雷達陣地);b)含有一定人造設施痕跡的開闊地帶(典型場景類型為機場)。將3類車輛目標切片按照編隊的模式插入場景SAR圖像中,即可構建典型場景模型。一般情況下編隊車輛目標為3輛~6輛。
2.2 自適應閾值分割
以對典型場景進行數字仿真得到的訓練場景中的2輛BMP2,2輛D7,2輛T72目標編隊為例。假設車輛目標的質心與切片中心重合,先取切片中心區域的48×48個像素作為新切片,基于變化檢測量的閾值提取方法對訓練集數據、車輛目標測試集數據與雜波區域數據進行閾值計算與二值分類。計算出所有切片二值圖像中車輛目標的上下左右邊界,將所有原始切片按照邊界值進行剪裁,完成預篩選。基于變化檢測量閾值的特征提取方法,預篩選處理前后車輛目標典型場景如圖4所示。可以看出,預篩選后,車輛目標得以保留,沒有出現漏警或虛警等情況。可知,本文提出的閾值分割法在強地雜波環境下對3種車輛目標均能夠實現較好的分割效果。
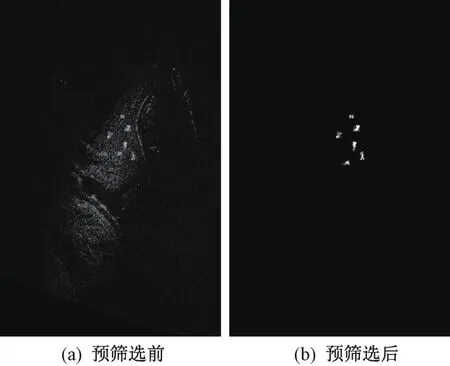
圖4 預篩選前后車輛目標典型場景圖
2.3 實驗結果分析
由于SAR場景的分辨率為1.2 m×1.2 m,而車輛目標切片的分辨率為0.3 m×0.3 m,根據自適應閾值分割得到的結果對所有切片(訓練集、測試集、雜波)進行抽取,得到分辨率為1.2 m×1.2 m的切片,此時車輛目標切片尺寸為12×12個像素。根據二維像素間隙度特征的提取方法,12×12個像素的切片可以分為6層,生成2行6列的二維像素間隙度特征向量;而對于一個15×15個像素的切片,采用高維分層間隙度特征也只能生成一個1行6列的向量,此時的切片僅采用均值反映切片中的區域變化,無法全面地描述切片中每一層像素的組成與變化趨勢,容易出現誤差。取信噪比為(5~8)dB的SAR圖像,分別應用二維像素間隙度特征向量和高維分層特征間隙度特征向量對車輛目標鑒別可信度進行排序求解。當測試集分別為對應3種車輛目標的ROI切片時,3種車輛目標為訓練集的目標鑒別可信度結果如圖5所示。可以明顯看出,當SAR圖像本身的信噪比較低時,采用本文提出的改進的分層方法和二維像素間隙度特征向量提取方法,得到的目標鑒別可信度提升了3%~8%;對于每一類待檢測車輛目標,以其同種車輛目標數據作為訓練集時,即使場景中地雜波較強,仍然能夠得到理想的鑒別結果。當采用另外兩種車輛目標作為驗證類型時,同樣可以得到相同的實驗結果。
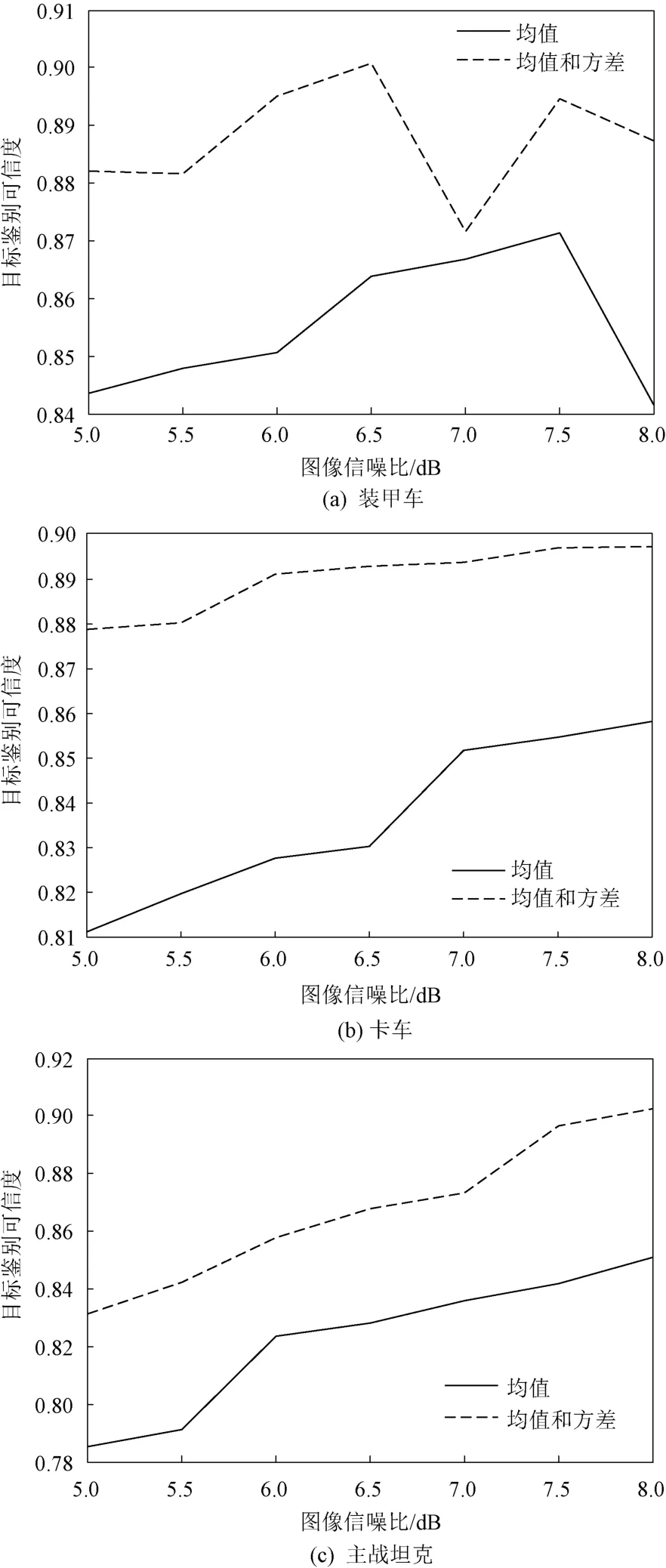
圖5 3種車輛目標鑒別可信度對比
3 結論
在強雜波背景環境中,SAR圖像中車輛目標的周圍存在大面積的雜波區域,采用自適應閾值篩選并不能在ROI切片中完整保留車輛目標。因此為了使特征向量盡可能多地反映車輛目標切片的灰度值分布情況,本文提出了一種改進的適應強地雜波環境的車輛目標鑒別方法,在不犧牲特征向量對切片區域組成的反映能力的前提下,保證每一次仿真實驗時車輛目標都能出現在切片中。對比仿真實驗證明了在強雜波環境下本文提出的方法對同種車輛目標的鑒別可信度穩定在96%以上。但是由于不同車輛目標在幾何特征上差異較小,以異種車輛目標作為訓練集時,算法會存在誤將不同的車輛目標檢出,即無法有效識別車輛目標類型的問題。后續可以根據更精細的特征選取與計算,實現多種類車輛目標相互之間的穩定區分。
