機(jī)器人裝配工作站離線編程與虛擬仿真系統(tǒng)設(shè)計(jì)
2022-06-22 06:14:06張華文
自動(dòng)化與儀表 2022年6期
張華文,張 麗
(1.河南省工業(yè)機(jī)器人應(yīng)用工程技術(shù)研究中心,南陽(yáng) 473000;2.河南工業(yè)職業(yè)技術(shù)學(xué)院 自動(dòng)化工程學(xué)院,南陽(yáng) 473000)
在“工業(yè)革命4.0”和“中國(guó)制造2025”政策背景影響下,智能制造技術(shù)迅速發(fā)展,工業(yè)機(jī)器人作為其中的核心設(shè)備廣泛應(yīng)用于打磨、裝配、焊接等領(lǐng)域[1]。 傳統(tǒng)的在線編程方式需要機(jī)器人處于停止?fàn)顟B(tài),占用機(jī)器人運(yùn)行時(shí)間,影響生產(chǎn)效率;在線示教十分繁瑣,費(fèi)時(shí)費(fèi)力,在線調(diào)試操作時(shí)難免會(huì)發(fā)生碰撞,存在安全隱患[2]。 離線編程技術(shù)通過對(duì)實(shí)際場(chǎng)景進(jìn)行建模,可以在機(jī)器人正常運(yùn)行的同時(shí)完成編程工作,經(jīng)過仿真驗(yàn)證后再下載到機(jī)器人實(shí)體上來(lái)完成相應(yīng)的任務(wù), 有效地提高了生產(chǎn)效率和安全性。 文獻(xiàn)[3]以民航客機(jī)機(jī)身自動(dòng)退漆打磨為研究對(duì)象,使用RobotStudio 搭建了飛機(jī)機(jī)身自動(dòng)退漆打磨工作站;文獻(xiàn)[4]以陶瓷托輥軸承座自動(dòng)裝配生產(chǎn)線為研究對(duì)象,介紹了一種利用SolidWorks 和Robot-Studio 建模及虛擬運(yùn)行生產(chǎn)的方案;文獻(xiàn)[5]以汽車輪轂打磨加工作業(yè)為研究對(duì)象,提出一種雙工業(yè)機(jī)器人協(xié)同打磨作業(yè)工作站設(shè)計(jì)方案;文獻(xiàn)[6]利用RobotStudio 虛擬仿真軟件設(shè)計(jì)一類以IRB2600 工業(yè)機(jī)器人為控制核心的多機(jī)器人工作站,用以實(shí)現(xiàn)對(duì)裝配搬運(yùn)生產(chǎn)線的虛擬搭建;文獻(xiàn)[7]構(gòu)建基于RobotStudio 的工作站仿真,對(duì)生產(chǎn)線實(shí)體模型采集獲得精確位置信息,能夠?qū)崿F(xiàn)重載工業(yè)機(jī)器人的路徑規(guī)劃。 上述研究都集中于對(duì)實(shí)際場(chǎng)景進(jìn)行虛擬仿真,并沒有實(shí)現(xiàn)離線編程和設(shè)備實(shí)體的結(jié)合。
本文使用UG 對(duì)機(jī)器人電機(jī)裝配工作站進(jìn)行建模,并導(dǎo)入到RobotStudio 中,配置I/O 信號(hào),創(chuàng)建Smart 組件, 進(jìn)行信號(hào)連接, 實(shí)現(xiàn)工作站的虛擬仿真。使用RAPID 完成離線編程,經(jīng)過仿真驗(yàn)證后,下載到機(jī)器人實(shí)體,完成電機(jī)裝配工作。 本系統(tǒng)為電機(jī)裝配工作站提供了實(shí)驗(yàn)平臺(tái),提高了生產(chǎn)效率和安全性,對(duì)自動(dòng)化和智能化工廠的發(fā)展具有重要的現(xiàn)實(shí)意義。
1 工作站建模
1.1 工作站描述
本工作站用來(lái)完成電機(jī)底座外殼、電機(jī)內(nèi)芯和法蘭盤的裝配, 主要由ABB IRB120 型機(jī)器人、工具架、吸盤工具、手爪工具、立體倉(cāng)庫(kù)、變位機(jī)、旋轉(zhuǎn)物料臺(tái)、傳送裝置等部件構(gòu)成。 其中,工具架用來(lái)存放吸盤和手爪工具,立體倉(cāng)庫(kù)用來(lái)存放電機(jī)底座外殼,旋轉(zhuǎn)物料臺(tái)用來(lái)存放電機(jī)內(nèi)芯,傳送裝置用來(lái)進(jìn)行法蘭盤上料,手爪工具和吸盤工具用來(lái)夾取不同的配件。 首先使用手爪工具從立體倉(cāng)庫(kù)中抓取電機(jī)外殼放置到變位機(jī)的夾持工位,然后從旋轉(zhuǎn)物料臺(tái)上夾取電機(jī)內(nèi)芯并放到電機(jī)底座中完成裝配,再使用吸盤工具從傳送裝置上吸取法蘭盤并放置到電機(jī)底座中完成裝配,最后使用手爪工具將裝配好的電機(jī)放回立體倉(cāng)庫(kù)。工作站實(shí)體如圖1所示。
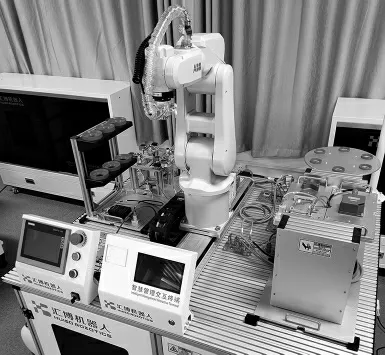
圖1 工作站實(shí)體Fig.1 Workstation entity
1.2 工作站三維建模
根據(jù)工作站各部件實(shí)際尺寸, 使用UG 分別繪制出立體倉(cāng)庫(kù)、工具夾、手爪工具、吸盤工具、變位機(jī)、旋轉(zhuǎn)物料臺(tái)、傳送裝置和電機(jī)配件的三維模型。在RobotStudio 中導(dǎo)入IRB120 機(jī)器人模型和UG 三維模型,并進(jìn)行正確布局。工作站的三維模型如圖2所示。
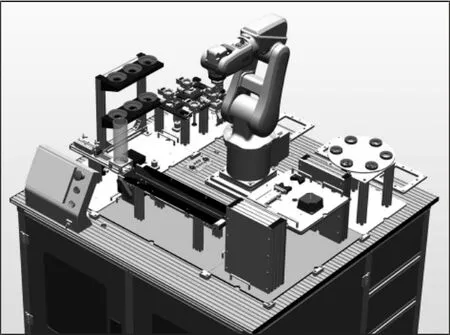
圖2 工作站三維模型Fig.2 Workstation 3D model
2 系統(tǒng)設(shè)計(jì)
2.1 創(chuàng)建Smart 組件
Smart 組件能夠賦予幾何體動(dòng)態(tài)仿真效果。 通過創(chuàng)建不同的Smart 組件,可以仿真出工作站的復(fù)雜動(dòng)作[8]。主要的Smart 組件有:手爪組件、旋轉(zhuǎn)物料臺(tái)組件、傳送裝置供料組件。
在手爪夾具Smart 組件中,添加線性傳感器LineSensor 用來(lái)檢測(cè)手爪閉合時(shí)是否有工件被抓取到,添加PoseMover 組件用來(lái)模擬手爪的開合動(dòng)作,添加Attacher 和Detacher 組件用來(lái)實(shí)現(xiàn)工件被抓取后和手爪的聯(lián)動(dòng)。 手爪工具的Smart 組件設(shè)計(jì)如圖3 所示。
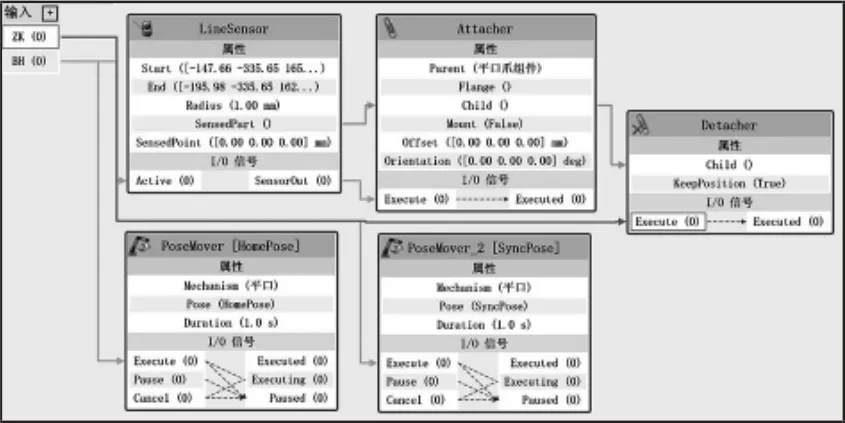
圖3 手爪工具Smart 組件設(shè)計(jì)Fig.3 Design of Smart component of gripper
在旋轉(zhuǎn)物料臺(tái)Smart 組件中, 添加線性傳感器LineSensor 用來(lái)檢測(cè)電機(jī)內(nèi)芯物料是否到位, 添加Rotator 組件來(lái)實(shí)現(xiàn)物料臺(tái)的旋轉(zhuǎn)動(dòng)作,添加Logic-SRLatch 邏輯組件來(lái)實(shí)現(xiàn)信號(hào)的邏輯控制, 添加Timer 組件來(lái)實(shí)現(xiàn)定時(shí)功能。旋轉(zhuǎn)物料臺(tái)Smart 組件設(shè)計(jì)如圖4 所示。
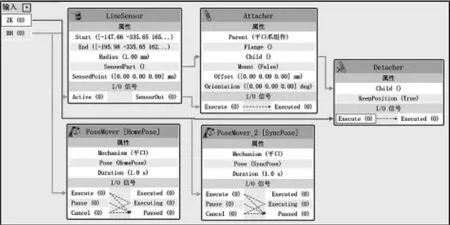
圖4 旋轉(zhuǎn)物料臺(tái)Smart 組件設(shè)計(jì)Fig.4 Design of Smart component of rotating table
在傳送裝置供料組件中,添加線性傳感器Line-Sensor 用來(lái)檢測(cè)工件是否到位; 添加PoseMover 組件用來(lái)實(shí)現(xiàn)工件在傳送帶上的運(yùn)動(dòng);添加Source 和Sink 組件用來(lái)實(shí)現(xiàn)工件的產(chǎn)生和被抓取后的消失動(dòng)作;添加LogicGate 組件來(lái)實(shí)現(xiàn)信號(hào)的邏輯控制。傳送裝置供料Smart 組件設(shè)計(jì)如圖5 所示。
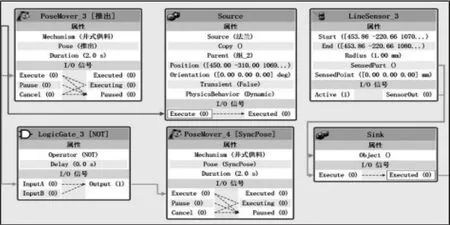
圖5 傳送裝置供料Smart 組件設(shè)計(jì)Fig.5 Design of Smart component of conveyor
2.2 機(jī)器人I/O 配置
為了和外部控制器進(jìn)行通信,需要配置機(jī)器人的I/O 信號(hào)。 將機(jī)器人的I/O 信號(hào)和Smart 組件的I/O 信號(hào)進(jìn)行關(guān)聯(lián),此時(shí)的Smart 組件相當(dāng)于一個(gè)和機(jī)器人進(jìn)行通信的PLC,可以實(shí)現(xiàn)通信的仿真。 機(jī)器人需要配置10 路數(shù)字輸出信號(hào),用來(lái)控制快換裝置和工具的電磁閥動(dòng)作、變位機(jī)和旋轉(zhuǎn)物料臺(tái)的轉(zhuǎn)動(dòng)等。 需要配置3 路數(shù)字輸入信號(hào),用來(lái)接收物料臺(tái)旋轉(zhuǎn)歸零、工件檢查光電開關(guān)等信號(hào)的輸入。具體的I/O 信號(hào)配置如表1 所示。
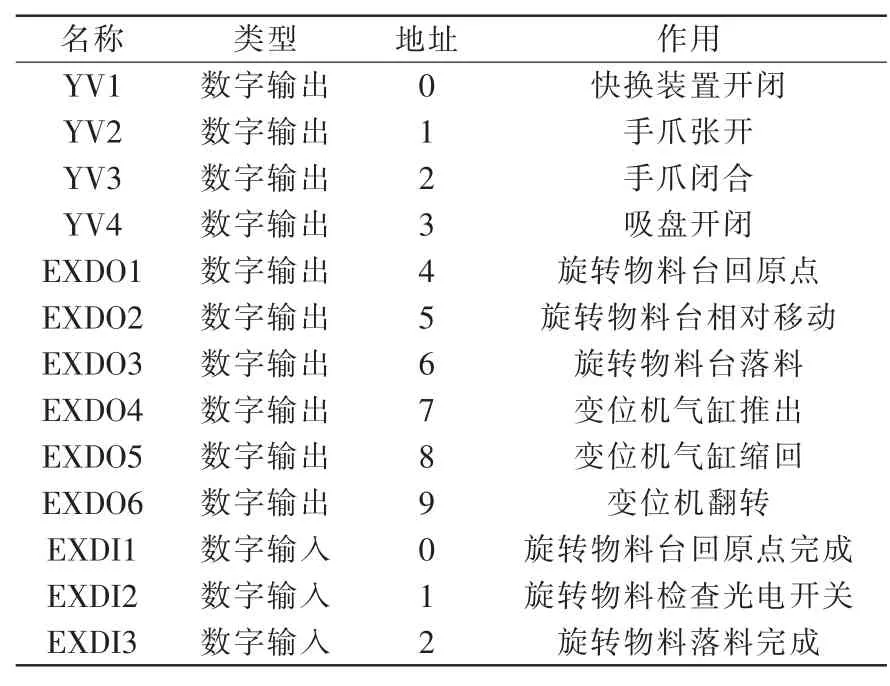
表1 機(jī)器人I/O 信號(hào)配置Tab.1 Robot I/O signal configuration
3 程序設(shè)計(jì)
本工作站主要完成電機(jī)底座外殼、 電機(jī)內(nèi)芯、法蘭盤的正確安裝。 通過機(jī)器人更換正確的手爪工具,將底座外殼從立體倉(cāng)庫(kù)搬運(yùn)到裝配臺(tái)上;旋轉(zhuǎn)供料完成電機(jī)內(nèi)芯上料,工業(yè)機(jī)器人將其夾取安裝在底座上;井式供料推出法蘭盤,通過輸送模塊輸送到指定位置,工業(yè)機(jī)器人更換吸盤工具,變位機(jī)翻轉(zhuǎn),工業(yè)機(jī)器人將其安裝并旋緊;工業(yè)機(jī)器人更換手爪工具, 將裝配好的電機(jī)搬運(yùn)進(jìn)立體倉(cāng)庫(kù)中。程序流程如圖6 所示。
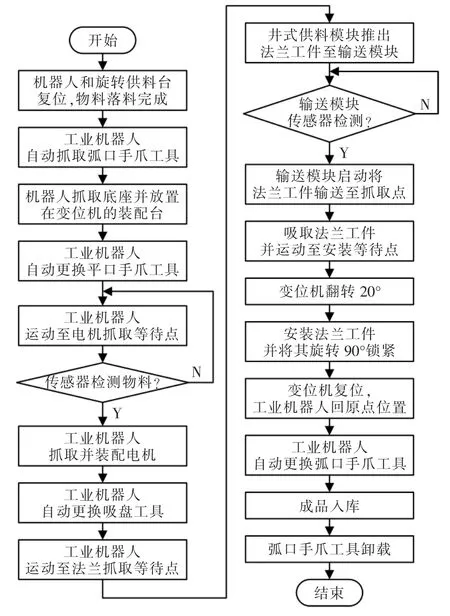
圖6 程序流程Fig.6 Program flow chart
主要程序如下:
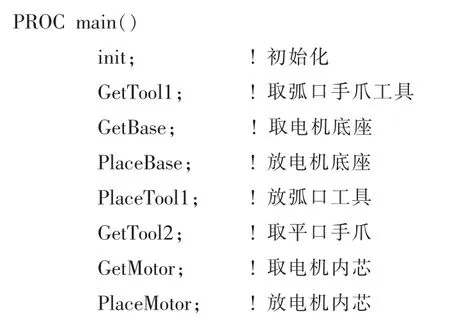
4 實(shí)驗(yàn)結(jié)果與分析
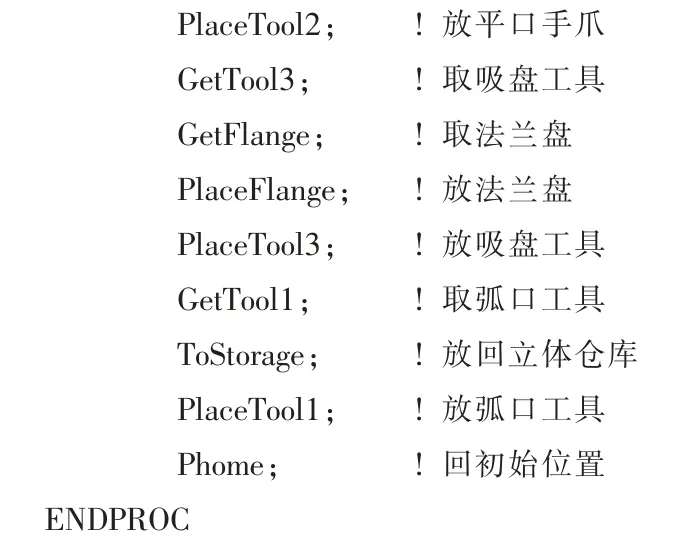
在RobotStudio 中可以直接運(yùn)行程序進(jìn)行仿真,通過信號(hào)分析器可以對(duì)TCP 的運(yùn)行速度進(jìn)行監(jiān)控。為提高運(yùn)行效率,需要盡可能使用高速運(yùn)行,這里設(shè)置運(yùn)行速度為1500 mm/s, 接近點(diǎn)的速度設(shè)置為200 mm/s,TCP 的速度曲線如圖7 所示。
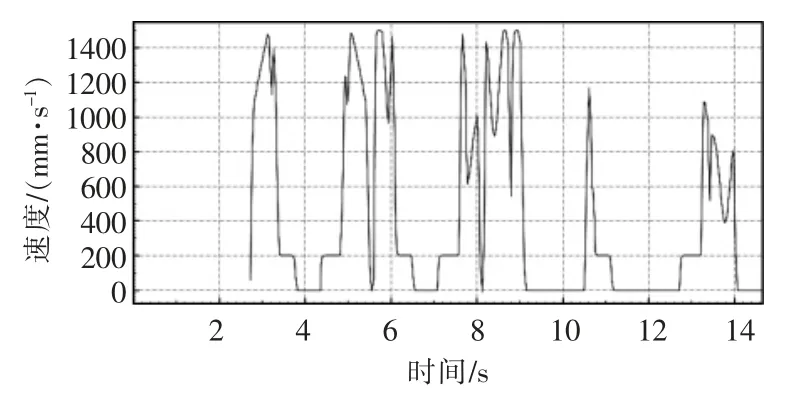
圖7 降速前的TCP 速度曲線Fig.7 TCP speed curve before deceleration
可以看出,速度變化并不平穩(wěn),從而會(huì)對(duì)設(shè)備產(chǎn)生沖擊。 將運(yùn)行速度降低為1000 mm/s,接近點(diǎn)速度不變,TCP 的速度曲線如圖8 所示。 降速后,運(yùn)行時(shí)間多了0.8 s,但是速度變化更加平穩(wěn),機(jī)器人抖動(dòng)明顯減弱,對(duì)設(shè)備的沖擊減小,有利于延長(zhǎng)設(shè)備的使用壽命和后期維護(hù)。
圖8 降速后的TCP 速度曲線Fig.8 TCP speed curve after deceleration
在軟件中完成離線編程并經(jīng)過仿真驗(yàn)證后,將程序下載到機(jī)器人實(shí)體。 進(jìn)行示教點(diǎn)的微調(diào)后程序即可正常運(yùn)行,完成電機(jī)裝配工作。 經(jīng)過測(cè)試,完成1 次在線編程和調(diào)試需要40 分鐘左右,而完成1次離線編程和調(diào)試僅需20 分鐘左右,且離線編程不會(huì)占用機(jī)器人的運(yùn)行時(shí)間。 通過對(duì)比可見,離線編程能夠?qū)⒕幊虝r(shí)間縮短1 倍,極大的提高了生產(chǎn)效率。
5 結(jié)語(yǔ)
以工業(yè)機(jī)器人電機(jī)裝配工作站為研究對(duì)象,基于RobotStudio 和UG 搭建了機(jī)器人離線編程與虛擬仿真系統(tǒng)。 根據(jù)工作站各模塊的實(shí)際尺寸參數(shù),使用UG 繪制了工作臺(tái)、工具架、手爪工具、吸盤工具、立體倉(cāng)庫(kù)、變位機(jī)、旋轉(zhuǎn)物料臺(tái)、傳送帶等三維模型;在RobotStudio 中導(dǎo)入三維模型,并進(jìn)行正確布局;創(chuàng)建Smart 組件進(jìn)行動(dòng)畫仿真,模擬工作站的復(fù)雜動(dòng)作;配置機(jī)器人的I/O 信號(hào),和Smart 組件進(jìn)行通信來(lái)模擬和PLC 的通信過程; 編寫離線程序,完成任務(wù)的虛擬仿真,并下載程序到實(shí)體機(jī)器人,完成電機(jī)的裝配工作;通過對(duì)TCP 的運(yùn)行速度進(jìn)行監(jiān)控比較,可得出將機(jī)器人速度設(shè)定為1000 mm/s,接近點(diǎn)速度設(shè)定為200 mm/s 時(shí)機(jī)器人運(yùn)行較為平穩(wěn);通過離線編程和在線編程調(diào)試的耗時(shí)對(duì)比,可得出離線編程將編程時(shí)間縮短近一倍,從而極大提高了編程效率。
本系統(tǒng)能夠完成機(jī)器人的離線編程和虛擬仿真,有效改善了在線示教過程的繁瑣,提高了編程效率。 離線編程不需要占用機(jī)器人的運(yùn)行時(shí)間,經(jīng)過仿真驗(yàn)證后再下載到機(jī)器人實(shí)體上來(lái)完成相應(yīng)的任務(wù),提高了生產(chǎn)效率和安全性,降低了設(shè)備維護(hù)成本和時(shí)間,為裝配工作站提供了設(shè)計(jì)依據(jù)和實(shí)驗(yàn)平臺(tái)。