基于違約穩定法的剪式可展機構展開過程分析與仿真*
2022-06-23 10:57:50吳上生
機電工程技術 2022年5期
關鍵詞:結構
吳上生,陳 柘,蘭 僑
(華南理工大學機械與汽車工程學院,廣州 510630)
0 引言
剪叉可展結構由于其結構緊湊、承載量大和易操作性,收縮時占用空間小,展開時可以達到并穩定設想的狀態,因此在現代物流、航空裝卸等領域中得到廣泛應用[1]。結構能否順利按設計要求展開和收縮,是在剪式可展結構設計中首先需要考慮的問題,因此需要對可展結構進行運動學分析,以驗證是否滿足要求。Travis L[2]推導了剪式折疊機構在展開過程中的運動方程;徐坤[3]對剪式彎曲折展機構建立了機構單元運動的數學模型,然后分析了該機構的自由度和運動形式;楊毅[4]利用螺旋理論對剪鉸多面體機構進行了自由度和奇異性分析;吳新燕[5]從驅動機構、連桿機構、驅動方式等的優化出發,驗證了環形桁架結構的順利展開。在滿足運動學要求后,需要進行可展結構的動力學分析,得到在外力作用下的運動規律。紀斌[6]對非對稱平面剪鉸單元進行了分析,討論了速度、加速度等物理量的動力學特性;李博[7]在基于剪式線性陣列可展結構對稱性的動力學分析方法研究方面,提出了坐標和速度修正方法,得到了剪式單元各節點物理量的變化過程,但結構過于簡單,該方法的針對復雜結構的普適性沒有得到驗證。彭麒安[8]針對剪式單元陣列可展結構提出了一種規范化動力學分析方法,大幅度地降低組裝難度,提高建模效率。Sun-Yuantao[9]結合虛功原理和螺旋理論對可展結構的動力學行為和展開過程進行了分析。楊玉龍[10]采用一種基于向量式有限元法建立剪式結構力學模型,對展開過程進行模擬,比較了剛性桿和柔性桿的展開速度及時間。Yang Tao[11]提出了一種非交叉結構元件的剪式可展機構,構造了具有徑向膨脹運動的可展開多面體機構,獲得了較大的變形能力,同時仿真驗證了其展開過程,但過多關注于結構機理,缺乏動力學理論分析。
本文研究的剪式可展結構是連桿式可展結構的一種,與大多數可展結構桿長都相等不同,本文所用連桿有短桿和長桿兩種,短桿和長桿經銷軸連接成剪式鉸,具有運動收縮功能,短桿起傳遞力矩和支撐連接長桿等作用,相對于傳統的兩桿鉸接可展結構具有更強的抗變形能力。首先,利用幾何關系推倒其運動學規律,其次,根據約束條件建立基于拉格朗日乘子法的動力學方程,采用Baumgarte約束違約穩定法對系統的坐標和速度進行修正,避免數值結果的發散,最后利用MATLAB 完成展開過程數值仿真,得到其運動規律。
1 剪式可展機構的運動學分析
如圖1 所示,本文所研究的剪式可展機構由連桿和銷軸組成,各桿之間鉸接,各桿的端點分別用數字1、2、3、4、5、6、7、8 表 示,各桿的桿長由Lij表示,其中i、j分別代表端點。取端點1 為坐標原點建立直角坐標系xoy,端點1 和端點8 是固定不動的,兩端點之間的距離為L,連桿16 和連桿28 可以分別繞端點1和端點8 轉動,結構的動力系統假設為固定在點6 上并只能提供沿x軸負方向的恒力,顯然連桿16 轉動角速度是時間t的函數。
剪式可展單元是單自由度系統,因此其運動規律可以用某一時刻連桿16 的轉角θ來描述。假設某t時刻單元的位形如圖1所示,其中桿16與x軸的夾角為θ,桿28與x軸的夾角為φ,端點1、端點8 的坐標顯然分別為(0,0),(0,L),下面推導其余6個端點的坐標。
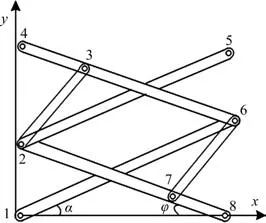
圖1 剪式可展單元結構簡圖
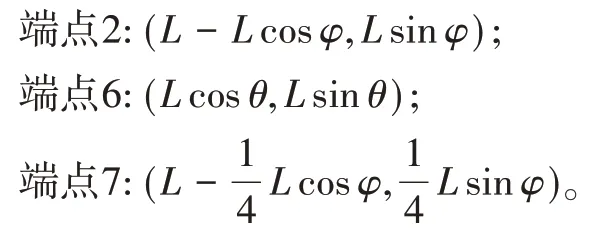
根據桿長和角度關系可得端點2、端點6、端點7 的坐標分別如下。
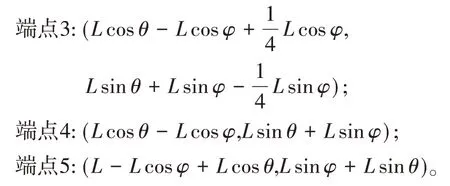
根據端點2、3、6、7 所組成的平行四邊形關系,角度在第二級可展單元得到繼承,角度如圖1 所示,由此可以得到端點3、端點4、端點5的坐標分別如下。
為了建立φ和θ的關系,使得坐標方程中只有一個變量,可利用端點6和端點7的桿長限制坐標關系,得到以下關系式:

由三角函數關系式:

聯立公式(1)、公式(2)可以得到兩個角度關系如下:
通過上述分析得到了剪式可展單元的整體坐標矩陣,每個坐標均是桿16 與x軸夾角θ的函數,由此可以確定結構在每一時刻的狀態,且相互連接的剪式單元的運動不是相互獨立的,一個桿件的運動勢必會影響與其相連的桿件。
2 剪式可展單元的動力學分析
2.1 等效質量矩陣
假設剪式可展結構由n個等截面直剛桿組成,將每個桿件都得端點作為節點,則有2n個節點,6n個笛卡爾坐標,結構系統的位姿即剪式可展結構空間位置的坐標集合可由這6n個笛卡爾坐標來描述。取桿ij作為分析對象,則兩端點的坐標可以表示為:

該桿件上任一點的速度矢量可表示為:

N(x,y,z)為桿單元速度函數矩陣,其具體形式如下:

式中:Lij為桿ij的桿長;xˉ為任一點X到端點i的長度;I3為三維單位矩陣。
單元動能可以表示為:

當桿件截面面積A相同,密度ρ相同時,式(7)可寫為:

式中:M(e)為單元的等效質量矩陣;V(e)為桿單元體積。
由式(8)可得桿單元的等效質量矩陣:

本文研究對象剪式可展單元的展開收縮可以看作是在平面內完成,則對于平面桿單元,其等效質量矩陣可以簡化為:

將各單元剛度矩陣按照節點號進行下標轉換,將轉換后的單元剛度矩陣投放到總體剛度矩陣的對應位置上,按照疊加法可以獲得結構的整體質量矩陣。
2.2 約束方程
在剪式可展結構中,存在3 種約束,即桿長約束、鉸接點約束、端點邊界約束。桿長約束表示在結構運動過程中各個端點坐標發生改變時,同一個桿件的兩端點之間的距離不變;鉸接點約束表示使得兩個桿件形成鉸接的端點在運動過程中相對于這兩個桿件的相對位置坐標不變;端點邊界約束表示剪式結構中端點固定不變的坐標關系,包括端點的固有坐標以及兩端點的限制關系坐標。
桿長約束如下所示:

圖1 所示剪式線性陣列結構有6 個桿單元,則對應的桿長約束方程共有6 個,分別將桿件各端點坐標及桿長代入上式得到。
鉸接點約束如下所示:

式中:Xi、Xj、Xk、Xl分別是鉸接處不同桿件的端點坐標;a、b、c、d分別是指各端點到銷軸處的距離。
圖1 的剪式可展結構有4 個鉸接點,故相應的鉸接點約束方程有4個。
圖1 中的端點1、端點8 采用與地面的鉸接,故這兩點的坐標均為定值;為了保證剪式可展機構伸展收縮時端點4、端點5在同一高度,因此需要限定這兩端點的距離保持不變。以上兩種邊界約束條件用方程表達可如下式:

為了方便后續的計算,建立系統的廣義坐標矩陣,將各個端點坐標集合表示系統的位形。由上述公式(11)~(13)約束方程可將系統的總體約束關系表示為矩陣形式如下:

對約束方程求解偏微分方程可以得到約束條件下的雅可比矩陣Φq。
2.3 基于Baumgarte違約穩定法的動力學方程
針對一般系統模型,建立動力學方程的方法常用的有虛功原理、達朗貝爾貝爾原理、拉格朗日方程等。前兩種方法適用于已知系統能量描述的情況下,而拉格朗日方程適用于已知系統力的關系及坐標關系的情況下。本文使用拉格朗日乘子法[12]建立在約束方程基礎上的剪式可展單元系統的動力學方程:

式中:M為質量矩陣;?為約束系統的加速度矢量;Φq為 雅 可 比 矩 陣;λ為 拉 格 朗 日 乘 子, 取 為λ=(λ1,···,λs)T,s為約束方程的個數;F為系統所受廣義外力矩陣。
求解微分方程時,需要給定合適的初始解,才能獲得方程的唯一解,針對式(15)需要已知速度矢量和加速度矢量,故可對約束方程(14)求一階導數獲得速度約束方程,求二階導數獲得加速度約束方程:

聯立方程(15)和方程(17)可以得到增廣形式的動力學方程:

在利用上式進行數值積分計算時,由于方程只顯含加速度約束條件,故所得結果僅對加速度收斂,為了保證所得結果同時對位移、速度、加速度收斂,引入Baumgarte 約束違約穩定法進行求解,在上式中加入速度和位移的修正量,將式(17)改為:

此時動力學方程改為:

式中:α、β均為大于0的修正系數,一般α、β取值范圍為5~50時對結果違約校正效果較好。
3 算例分析與仿真結果
在推導出系統質量矩陣的基礎上,在i時刻,首先得到約束方程Φi,并求解一節偏微分得到雅可比矩陣,進一步地通過式(17)求出加速度右項ηi,結合系統受力、坐標和速度初始條件,根據式(20)求解方程可以得出q?i,對q?i進行數值積分,可以得到此時刻的速度q?i以及坐標qi,將所求得的速度和坐標分別代入式(14)、式(16),如果滿足精度范圍,則進行下一輪循環,直至完成預設時間內的所有數值解。
見圖2,由4 個長連桿和2 個短連桿組成的剪式可展結構,L16=0.436 m,L28=0.436 m,L25=0.436 m,L46=0.436 m,L23=0.16 m,L67=0.16 m,鉸點7 和鉸點8 的距離為L28∕4,鉸點3 和端點4 的距離為L46∕4。6 只連桿的橫截 面A=0.02 m×0.03 m,密 度ρ=7 850 kg∕m3,端點1 和端點8 坐標固定,但能繞各自鉸點轉動,在端點6 處有一驅動器,恒定為F=20 N 沿著x軸負方向,在驅動器作用下,該剪式可展結構可以伸展或收縮。

圖2 剪式可展單元組成及長度標號
取各端點坐標為系統的廣義坐標如下:

根據式(10)可以得到系統組裝后的質量矩陣為:

式中:
由式(11)~(13),根據系統的桿長約束、鉸接點約束、端點邊界約束,可得全部約束方程如下:
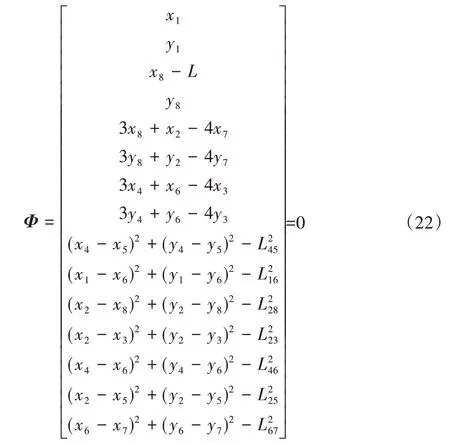
對上式約束方程求解偏微分可以得到約束方程的雅可比矩陣:
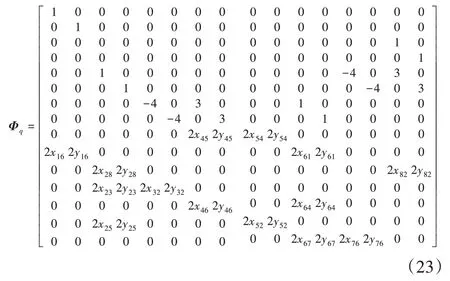
式中帶兩個下標的元素表示兩個坐標的差值,如:xij=xi-xj,代表xi和xj的坐標之差。
根據式(17)求得的加速度右項為:
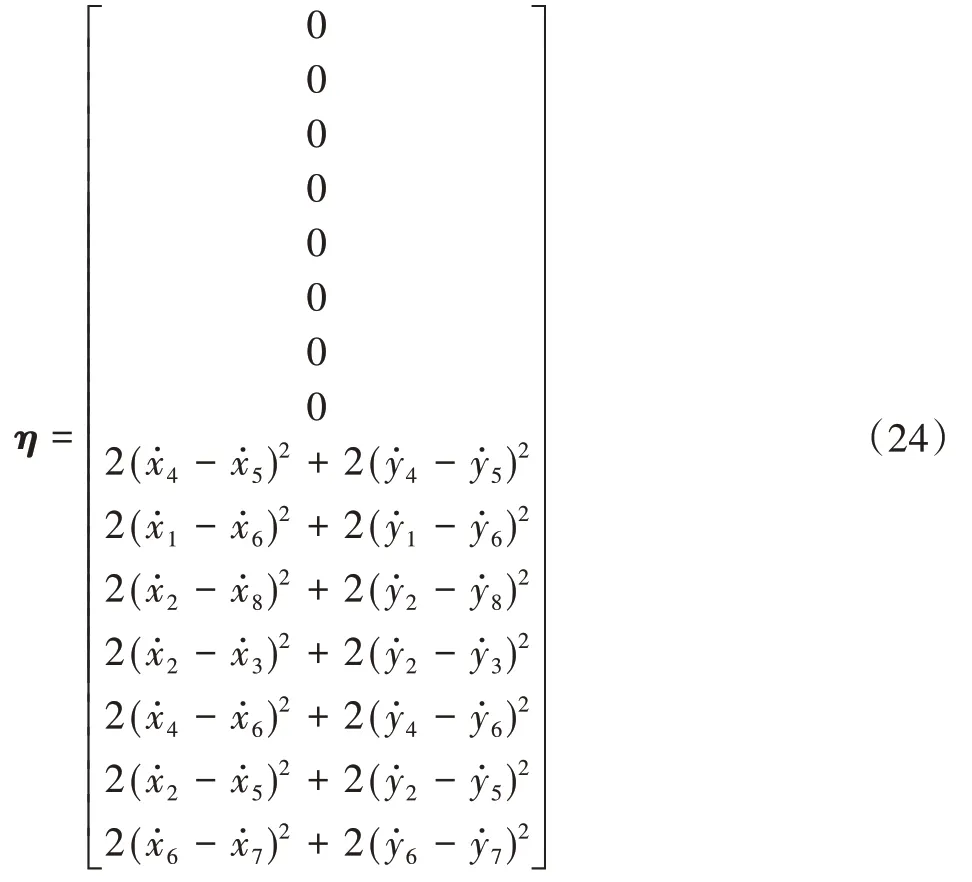
根據前節描述,可以知道系統所受力的廣義矩陣為:

在代入已知初始時刻的位置矢量和速度矢量后,將式(21)~(25)代入式(20)中,采用Runge-Kutta 法完成數值積分運算,可以得到在展開過程中剪式可展單元各端點的位置、速度、加速度隨時間的變化曲線,如圖3~5所示。

圖3 節點x方向位移隨時間變化曲線
由圖3 和圖4 看出,剪式可展結構在展開過程中在x方向上的坐標變化不大,而在y方向上變化很大,這極大發揮了可展結構的特有優勢,即很小范圍的驅動能夠實現更大范圍的展開空間。從圖5和圖6可得到速度隨著展開高度的增加越來越快,且非受力一側的節點速度要大于受力一側的節點速度,如節點2、節點3 不論是x方向速度還是y方向速度都比相對應的節點6 和節點7 的速度要快,這是本文所研究的含有不同桿件長度的剪式可展單元的特有屬性。由圖7 和圖8 可知,在展開過程中,x方向上的加速度在給定時間內一直呈增加的態勢,而在y方向上,各節點的加速度在增加到一個峰值后會降低,且加速度降低速度更快,時刻表1 s 中累積的幅值,僅用時0.3 s 就降低到時間地點時刻的加速度,這表明剪式可展機構展開過程較復雜,工程應用時,為了保證結構能夠穩定展開,需要根據圖5~8 反饋的信息制定合理的控制策略,以滿足實際的需求。綜合位移、速度、加速度隨時間的變化關系來看,本文所設計的一種含不同桿件長度的剪式可展機構整體運行平穩。
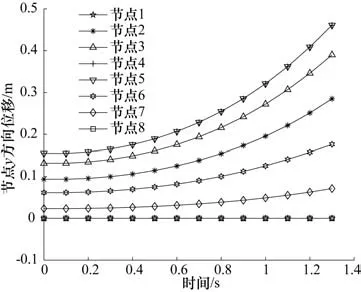
圖4 節點y方向位移隨時間變化曲線
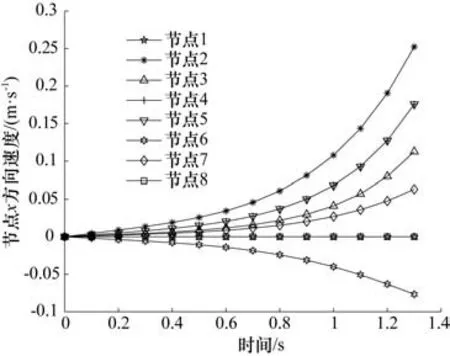
圖5 節點x方向速度隨時間變化曲線

圖6 節點y方向速度隨時間變化曲線
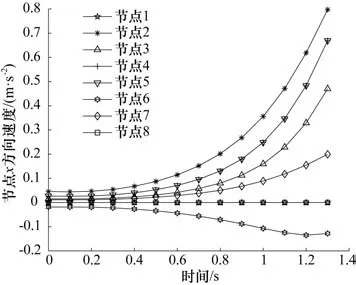
圖7 節點x方向加速度隨時間變化曲線

圖8 節點y方向加速度隨時間變化曲線
4 結束語
(1)本文提出一種由不同長度桿件組成的剪式可展單元結構,該結構在承載時不像傳統剪式結構隨著高度的升高重量會偏向一側,造成受力不均影響穩定性,反而伸展過程中最底部的鉸點位置不變,有效提高結構的強度和穩定性。
(2)根據剪式可展單元的基本約束關系,即桿長約束、鉸接點約束、端點邊界約束,建立了結構的動力學模型,采用基于Baumgarte違約穩定法使方程得到收斂的結果。
(3)剪式可展結構在展開過程中在x方向上的坐標變化不大,而在y方向上變化很大,這極大發揮了可展結構的特有優勢,即很小范圍的驅動能夠實現更大范圍的展開空間。且非驅動力一側的節點速度要大于受驅動力一側的節點速度,如節點2、節點3 不論是x方向速度還是y方向速度都比相對應的節點6 和節點7 的速度要快,這是本文所研究的含有不同桿件長度的剪式可展單元的特有屬性。研究結果可以為對稱剪式機構的工程應用和制定展開過程的精確控制提供理論依據。
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50