電動汽車用無刷直流電機驅動系統研究
2022-06-23 10:58:08張振杰
機電工程技術 2022年5期
關鍵詞:系統
李 靜,張 卡※,張振杰
(1.廣東省能源集團貴州有限公司,貴陽 550081;2.貴陽鋁鎂設計研究院有限公司,貴陽 550081)
0 引言
隨著能源供應的緊張,以及汽車尾氣給環境帶來的壓力越來越突出,開發以電能為驅動力的電動汽車正逐步成為汽車行業發展的趨勢。但作為動力源的蓄電池,由于其儲能低、充電時間長,成為了制約電動汽車發展與普及的因素[1]。因此,如何提高電池能量儲存能力或利用效率,是電動汽車發展過程中必須突破的瓶頸[2]。而作為電動汽車驅動源,電機質量的好壞也將決定電動汽車性能的優劣。無刷直流電機(BLDCM)以其效率高、體積小、重量輕、可靠性強、無換向火花、易實現無極調速等優點[3],成為電動汽車首選驅動源。良好的驅動源也需要良好的驅動系統,才能發揮其優越性[4]。因此,驅動系統研究也勢必成為研究的重點。
國內外許多學者對電動汽車能量回饋和驅動系統進行了深入的研究。李興全等[1]對直流無刷電機能量回饋種類進行了深入的研究,分析不同種類能量回饋的特點,給出了各種能量回饋的適用條件。孫佃升等[5]通過研究帶電流滯環跟蹤的直流無刷電機控制系統,提出利用電流反相控制的回饋制動方式,并進行了仿真分析。Juan W Dixon 等[6]通過在傳統驅動中添加超級電容的方式實現能量回饋。袁嘯林等[7]在經典直流無刷電機驅動網絡中加入Z 源變換器,實現直流母線升壓和直流無刷電機調速一體控制。周利強[8]在三相橋前加入一級雙向DC-DC電路,通過控制直流母線電流實現調速,將調速和換向分開,使得控制簡單易行。但其僅限于理論研究,并且僅研究了雙向DC的Buck模式下正向工作狀態。
本文在周利強[8]研究的基礎上,分析了雙向DC 的Boost模式下正向工作狀態,以及反向制動時能量回饋方式,并對各種方式下控制策略進行研究。最后以亞德諾半導體公司(ADI)的控制器Aduc7026 為核心,開發了一套無刷直流電機驅動系統,根據開發的系統驗證電動工作狀態及反向能量回饋制動時拓撲結構的性能。
1 帶前級雙向DC的無刷直流電機驅動系統分析
1.1 帶前級雙向DC驅動系統優點
傳統無刷直流電機驅動系統如圖1(a)所示。在傳統驅動系統中,三相橋不僅要承擔換向作用,還需擔負調速重任。當三相橋對電機進行調速時,必須工作于高頻斬波狀態,此時將帶來額外的轉矩脈動。另外,傳統三相橋驅動模式下,直流母線電壓不可調,最大輸出電壓(即電池電壓)有限,限制了轉速調節范圍。由于電機電流波形的紋波與加在電機輸入端子上電壓的瞬時值和電機反電動勢之間的電壓差值成正比,若直流母線電壓不可調,當輸入感抗較低時,電機相電流中必然出現較大的紋波[15]。
針對傳統驅動系統的缺點,本文采用帶前級雙向DC的新型驅動系統,拓撲結構如圖1(b)所示。其中前級變換器實現調速,后級三相橋實現換相。由于前級變換器的存在,三相橋不需要工作在高頻狀態,有利于轉矩脈動及電機相電流紋波的抑制。當直流母線電壓低于電機額定電壓時,通過前級變換器使直流母線電壓增大,擴大了電機調速范圍。

圖1 驅動電流拓撲結構Fig.1 The topology of main circuit
1.2 后級三相橋換相控制
對于后級三相橋,已有文獻證明,當其工作在ON_ON 模式時,轉矩脈動最小[8]。因此,本文采用兩兩導通方式,每隔60°電角度進行一次換相。換相過程中,在關斷某一個功率管的同時開通另一個對應的功率管,使每個功率管對應導通120°電角度。
換相時刻通過Hall 傳感器提供的信號決定,電機順時針轉動時Hall 信號(從電機軸端看)與功率管導通的對應方式如圖2 所示。由此可得順時針各功率管的驅動列表,如表1所示。

圖2 順時針轉動時Hall信號與開關管導通的關系Fig.2 Relationship between Hall signal and switch
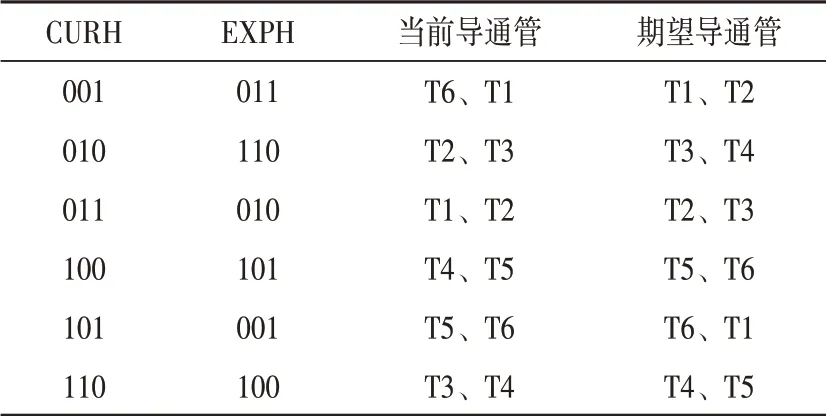
表1 順時針轉動時功率管驅動列表Tab.1 Drive table in clockwise rotation
1.3 電動運行時前級控制策略
電動運行時,前級變換器可能工作在Buck 模式下,也可能工作于Boost 模式下。限于篇幅,此處僅分析Boost模式下控制策略。
傳統電機調速系統中通常采用電機相電流形成電流閉環,此時需要對電機三相電流進行采樣并合成。本文通過對直流母線電流(電感電流)進行反饋,實現電流閉環,降低了此環節的成本及復雜性。
由此,需要找到電感電流與占空比及中間直流母線電壓的關系。
在Boost 模式下,利用開關網絡及開關元件平均模型法[11]對電路進行小信號處理,得到等效電路如圖3~4 所示。
由圖3可知:

圖3 直流等效電路Fig.3 DC circuit


則

此處是為了尋找電感電流與開關管占空比之間的關系,可將輸入電壓作為擾動。但對電動汽車而言,蓄電池電壓較為穩定。因此,可認為擾動Vg(s) = 0。因此,由圖4可知:

圖4 交流小信號等效電路Fig.4 AC circuit

綜合式(2)、(4)、(5)、(6)可得:

式(8)即為Boost 模式下電感電流關于占空比和中間直流母線電壓的表達式。據此,可分析系統穩定性和設計相應的控制器。
本文采用轉速、電流構成雙閉環來控制電機轉速,控制策略采用帶飽和限制的PI 調節器。電流內環通過控制電感電流實現,與傳統的控制相電流實現電流閉環相比,控制簡單易行;轉速外環實現轉速的精確可控,加快響應的速度,減小穩態誤差。
由于直流母線雜散電容等的影響,對電流內環的控制顯得尤為復雜。經過分析可知,電機機電時間常數遠大于電流PI 環節的積分時間常數,因此,可將電流環進行簡化,當作比例環節進行處理。
由上述分析,可得電動運行時控制流程如圖5所示。
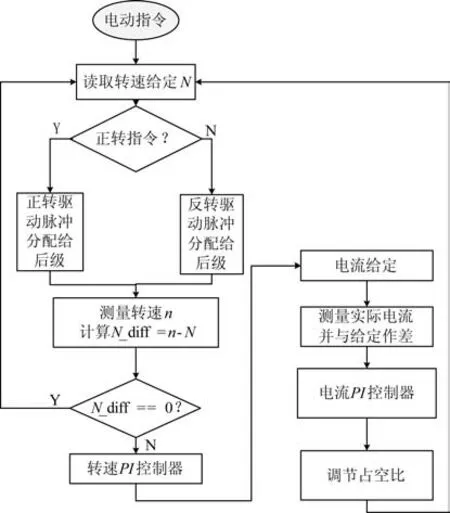
圖5 電動運行時前級控制流程Fig.5 Control flow chart in motor-driven rotation
1.4 能量回饋時前級控制策略
能量回饋制動的本質是電機反電勢高于電機外加電壓。因此,能量回饋有兩種方式:降低外加電壓和提升電機反電勢[12]。
對于傳統的三相橋控制系統,無論是全橋回饋制動還是半橋回饋制動,要實現能量回饋,都必須利用電機電樞繞組電感[12]。這種方法受制于電樞繞組電感的大小,且控制復雜、容易斷流。全橋回饋在續流階段蓄電池有功率輸出;而半橋回饋在非導通期間的第三相續流現象將導致電機相電流呈現非對稱,加劇轉矩脈動。
對于本文采用的拓撲結構,在不對后級三相橋進行控制基礎上,利用其體二極管構成三相橋式不控整流器對電機反電動勢進行整流。通過控制前級變換器,降低直流母線電壓,實現能量回饋及回饋電流的控制。采用帶飽和限制的PI調節器對回饋電流進行控制,流程如圖6所示。

圖6 能量回饋時前級控制流程Fig.6 Control flow chart in braking rotation
2 無刷直流電機驅動系統設計
根據前文分析,以ADI公司的Aduc7026 作為主控制器,開發了一套直流無刷電機驅動系統。Aduc7026 是ADI 公司Aduc70x 微控制器家族的增強型產品,是一款高 性 能 的16 位∕32 位ARM, 系 統 時 鐘 頻 率 高 達41.78 MHz,具有豐富的外設資源,適合于工業控制領域[13]。整個系統控制框圖如圖7所示。

圖7 系統控制框圖Fig.7 Block diagram of System hardware
系統利用一個發電機與無刷直流電機通過聯軸器相連來模擬無刷直流電機的負載;發電機采用永磁同步電機,由3 個滑動變阻器組成三相阻性負載構成發電機的負載。主電路和電機實物分別如圖8~9所示。

圖8 主電路Fig.8 Main circuit
3 系統性能測試
對驅動系統進行性能測試,包括前級變換器性能測試、電動性能測試、能量回饋性能測試。

圖9 電機及負載Fig.9 Motor and Load
3.1 前級變換器性能測試
前級變換器的輸入端接蓄電池,輸出端接滑動變阻器。將滑動變阻器的電阻值調整為10 Ω,調節開關管占空比以調節輸出電壓。通過示波器保存電感電流波形、輸出電壓及輸出電流波形,用數字萬用表測量了輸入電壓、輸出電壓,用電流鉗測量輸入電流和輸出電流。定義前級變換器的效率為輸出功率與輸入功率之比[14],分別測試電動運行時Buck 模式和Boost 模式下前級變換器能量轉換效率。
圖10~11 所示分別為Buck 工作模式和Boost 工作模式下占空比為0.5時的電感電流波形圖,電感電流的頻率為40 kHz,與開關管工作頻率相同。圖12~13 所示分別為Buck模式和Boost模式下輸出電壓和輸出電流波形圖。
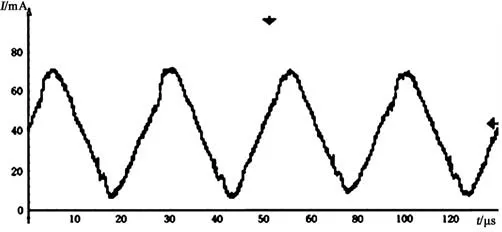
圖10 Buck模式下電感電流波形Fig.10 Wave of Inductor Current in Buck Model

圖11 Boost模式下電感電流波形Fig.11 Wave of Inductor Current in Boost Model

圖12 Buck模式下輸出電壓及電流波形Fig.12 Wave of Output Voltage and Current in Buck Model

圖13 Boost模式下輸出電壓及電流波形Fig.13 Wave of output voltage and current in boost model
表2~3 分別為Buck 模式下和Boost 模式下前級變換器的能量轉換效率。其中,電壓單位為伏(V),電流單位為安(A)。

表2 Buck模式下前級變換器的效率Tab.2 Efficiency of previous converter in Buck model
由表2~3可知,Buck模式下,占空比越大,變換器效率越高。Boost模式下,占空比越大,變換器效率越低。
3.2 電動性能測試
由調壓器經整流器后接前級變換器輸入端,后級變換器接直流無刷電機,直流無刷電機通過聯軸器與永磁同步電機(含阻性負載)相連。
調節調壓器,保持供電電壓為蓄電池額定電壓;設定轉速大小,調節滑動變阻器,改變負載大小,觀察轉速的變化;再設定不同的轉速,重復上述過程。實驗表明,當負載改變時,轉速跟蹤給定轉速保持不變。說明所涉及的調節器能基本滿足要求,電動性能良好。
調節供電電壓,使其低于蓄電池額定電壓1V并保持不變;設定不同的轉速大小,調節負載,觀察轉速變化。依次遞減供電電壓,重復上述過程。實驗表明,當負載改變時,轉速基本能跟蹤給定轉速保持不變。說明系統能在供電電壓較低時實現轉速調節,即能充分利用蓄電池電池剩余電能。圖14所示為電動狀態下相電流波形。
3.3 能量回饋制動性能測試
將蓄電池與無刷直流電機相連,無刷直流電機經聯軸器與另一個直流電機相連,由調壓器經整流器后對直流電機進行供電,利用直流電機拖動無刷直流電機運行。
設定充電電流大小,調節調壓器,增大直流電機電壓,觀察此時轉速及充電電流的變化。實驗結果表明,當不斷升高直流電機電壓時,電流跟蹤給定電流保持不變;轉速隨直流電機電壓升高而增大,系統能對充電電流實行較好的控制。圖15所示為能量回饋制動時充電電流波形。

圖15 能量回饋制動時充電電流波形Fig.15 Wave of charging current in energy feedback time
4 結束語
本文在詳細分析了帶前級雙向DC變換器的直流無刷電機驅動系統拓撲結構的基礎上,開發了一套直流無刷電機驅動系統,并根據開發的系統進行了實驗研究。結果表明,帶前級雙向DC變換器的驅動系統具有以下優點。
(1)前后兩級控制分離,前級調速,后級換向,前級方便引入先進的控制策略;后級變換器工作在低頻狀態,可以有效減少轉矩脈動。
(2)電動時,前級變換器可升降壓,有助于提高調速范圍,并能夠在電池電壓較低時實現全程調速,即充分利用電池剩余能量。
(3)相比于傳統的拓撲,在制動時系統利用外界電感,不容易斷流,能夠在轉速更低時實現能量回饋。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32