基于車頭時距均衡的多線路公交信號優先控制方法研究
2022-06-24 07:22:52陳振武王晉云羅佳晨
科學技術創新 2022年18期
陳振武 鄒 莉 周 勇 王晉云 羅佳晨
(深圳城市交通規劃設計研究中心,廣東 深圳 518057)
1 概述
城市公共交通具有集約高效、節能環保等優點,優先發展公共交通是構建資源節約型、環境友好型社會的戰略選擇。可靠性對于提高公交服務水平、增強公交吸引力具有重要意義,而公交運行過程中,車頭時距的均衡性是衡量可靠性的關鍵指標。公交車車頭時距不均衡,嚴重時會發生“串車”現象,即同一公交線路的前后兩輛或多輛車同時到達公交站點,會導致乘客的平均候車時間增加,以及車輛載客量的不均衡,公交服務水平急劇下降。公交車“串車”是一個很難避免的現象,一旦有一輛公交車因為各種隨機因素行駛滯后,那么站點會聚集更多的乘客等候,乘客上下車會耗費更多的時間,總的行程時間增加,而這輛車后面的公交車,會由于站點乘客的減少而總的行程時間減少,因而引發“串車”[1]。
公交駐站時間控制是公交車頭時距的控制常用方式之一。對于低頻公交線路,例如城市郊區的低客流量線路,設置公交運行時刻表,公交車輛一般會提前到達公交站點停車等候,到相應的站點運行時刻表時間,才再次啟動運行。對于高頻公交線路,例如城市人流密集的高客流線路,公交車輛到達站點的時間間隔小,設置站點運行時刻表就變得沒有意義,往往基于前后車輛的行駛情況,動態地調節公交車在站點的額外駐留時間,使得公交車和前后的車頭時距盡量均衡,例如Daganzo 等[2]提出根據公交車和前車的車頭時距調整控制點的駐留時間。公交駐站時間控制最明顯的缺點是會增加公交車在站點的延誤時間,公交運行效率低,乘客出行時間增加。公交信號優先[3]則是公交車頭時距的控制的另一種更為高效的選擇,Anderson[4]、陳光勤等[5]提出通過調整信號路口的信號燈,對路口范圍內的公交車實施有條件的公交優先,即只對那些“晚到”的公交車給予優先通行,而對于“早到”的公交車則不實施優先,Chow 等[6]研究的方法中甚至會延長紅燈以增加其在路口的延誤時間。通過公交信號優先來保障公交車頭時距均衡的控制方法,往往只局限在一個單一路口,車輛在駛離上游路口實現的車頭時距均衡,可能在到達下游路口時被破壞掉,導致上游路口的信號優先被浪費,也很難保障車輛達到站點時仍然是均衡的狀態。此外,公交車行駛速度控制[7]也是保障車頭時距均衡的方式之一,但該方法受限于實際道路條件,只有在交通量極低或者有公交專用道的道路才能取得比較好的控制效果。
針對上述問題,本研究提出了車路協同環境下基于車頭時距的多線路公交控制方法。在車路協同環境下,以公交站點為結點劃分優化單元,公交車到達站點的車頭時距均衡性為主要優化目標,建立統一的優化模型,對優化單元內所有路口的信號方案、公交車輛的行駛速度、駐站時間進行協同優化,實現公交車在全線路的實時動態精準控制。
2 總體流程
車頭時距控制的總體流程圖如圖1 所示,首先對要優化的一條或多條公交線路所在的路網進行優化單元的分割,以減小問題規模;車路協同環境下實時獲取公交車輛的位置信息、交叉口信號燈的狀態、道路排隊等相關數據;判斷路網內是否存在目標公交車輛,若存在,則調用優化模型,求解最優的交叉口信號配時方案、公交車在站點的駐站時間、公交車的最優行駛速度等,并將最優方案下發到信號機和公交車車載端;滾動優化方案直至路網內的目標公交車全部駛離路網。

圖1 方法流程圖
3 優化模型建立
3.1 優化單元分割
以公交站點為結點,對公交線路所在路網進行分割,分割完成后的每個單元獨立優化求解,以減小問題規模。以圖2 中的公交線路B 和C 為例,線路B 的站點1到站點2(包括路口4 和路口5)組成一個優化單元;線路B 的站點2 到站點3、線路C 的站點4 到站點5 有共同的信號控制交叉口6,因此將這兩條線路單元劃分為一個優化單元,該優化單元包括信號路口3 和6。

圖2 優化單元分割示意圖
3.2 優化模型概述
模型解析公交車的行駛軌跡和公交車行駛速度、站點駐站時間、信號路口配時方案之間的關系,對公交車軌跡進行精準建模。分割完成后的優化單元用Φ 表示,包含一條或多條公交線路(公交線路用符號φ 表示),公交線路φ 中對應一個或多個信號控制交叉口,用符號m表示其在線路中的順序,公交線路φ 的第m 個交叉口對應著編號為i 的交叉口,用符號iφm記錄其對應關系。由于一個優化單元內存在一條或多條公交線路,可能會有共同的交叉口,則不同的(φ,m)可能對應同一個i。
模型對公交車的運行軌跡進行建模,建立二次混合整數規劃模型,由目標函數式(1)和相關約束式(2)-(17)組成,輸入變量包括優化單元Φ 內全部信號交叉口的信號配時方案及其約束,公交站點和信號控制交叉口的位置關系,當前時刻的全部公交車輛的位置、行駛速度約束、駐站時間約束等。決策變量包括優化單元Φ 內全部信號交叉口的當前周期的配時方案和下一周期的配時方案,公交車在優化單元內剩余路段的行駛速度,還未離開公交站點的公交車的駐站時間,以及對公交車優化后的軌跡進行描述的相關變量。如圖3 所示,優化單元Φ 內線路φ,有兩個信號控制交叉口m 和m+1,折線是公交車輛的優化軌跡,從當前時刻所在位置一直到行駛至下游公交站點。

圖3 優化單元Φ 中的一條優化線路φ 的變量示意圖
3.3 目標函數
優化模型的目標函數如式(1),主要目標是讓公交車到站的車頭時距和目標值差距盡量小,且離公交站點越近、系數越大,次要目標讓信號配時方案的變化盡量小,以減少信號優化調整對其他社會車輛造成的負面影響。其中,是到下游站點的距離,是車輛n 到達站點的時間,Hnφ是目標車頭時距,是優化后的當前周期和下一周期的配時,是不考慮公交優先的配時方案。

3.4 相關約束
公交車在路段中間的行駛軌跡的相關約束如式(2)-(6)。當前時刻t,如果車輛n 下游是信號控制交叉口,那么車輛到達交叉口的時間等于離開交叉口的時間減去車輛在交叉口的延誤,如式(2),其中變量是路段的行駛時間,是在站點的駐站時間。路段行駛時間和駐站時間都需要滿足最大最小值的約束,如式(3)和(6)。公交車離開上游路口的時間加下游路段的行駛時間和在下游交叉口的延誤,等于離開下游交叉口的時間,如式(4)。若當前交叉口是優化單元內的最后一個路口,則離開當前路口的時間加下游路段的行駛時間,則等于到達下游站點的時間,用符號表示,如式(5)所示。

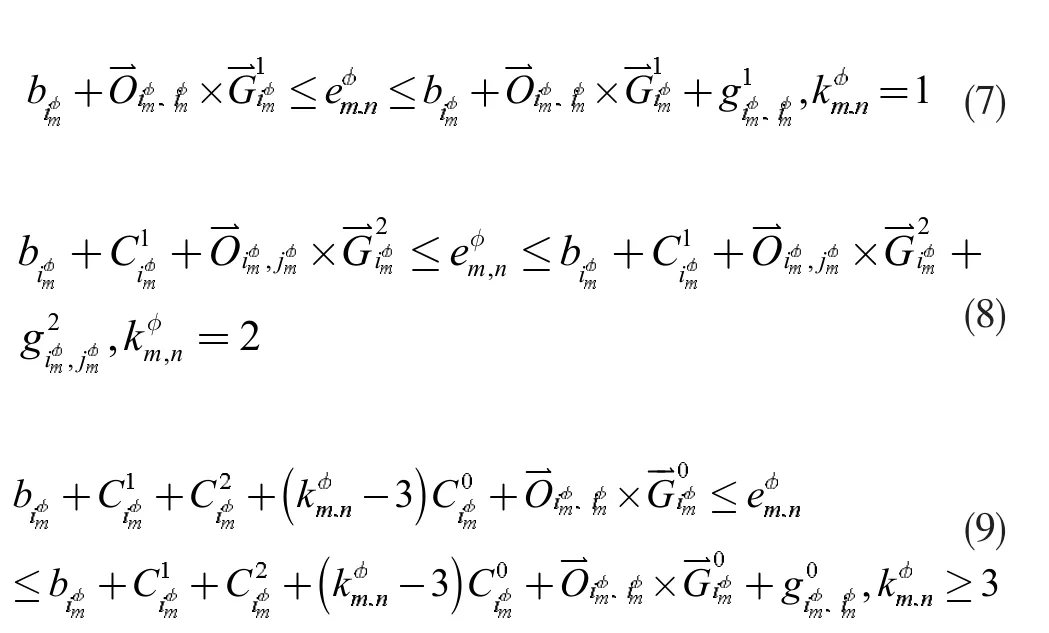
公交車離開交叉口的時間的相關約束如式(7)-(9)。公交車離開信號控制交叉口停車線的時間須在綠燈期間,若公交車輛n 在交叉口m 的當前周期離開,即,需滿足式(7);若公交車輛n 從當前周期的下一周期離開,即,需滿足式(8);若公交車輛n 從當前周期的下一周期的之后的周期離開,即,需滿足式(9)。其中,bi是當前時刻對應周期的開始時間,是當前周期和下一周期的綠燈時間矩陣,是綠燈開始時間矩陣,即為當前周期相位j 的周期綠燈開始時間。交叉口i 不考慮公交車的信號方案周期是優化的當前周期和下一周期的周期時長。約束(7)-(9)為非線性的約束,為方便求解,需要將其做線性化的轉換。
公交車到達交叉口的時間、離開交叉的時間、延誤時間、清空時間等變量之間的相互約束如式(10)-(13)。不同的到達時間段,對應變量,其值為1 時,當車輛在當前周期的綠燈結束之前到達;其值為2 時,當車輛在當前周期的下一周期的綠燈結束之前到達;其值為3 時,當車輛在當前周期的下一周期的下一的周期的綠燈結束之前到達;其值大于等于4 時,當車輛在當前周期的下一周期的下一周期的之后的周期的綠燈結束之前到達。當時,公交車輛n 到達交叉口m 的時間滿足約束式(10),對應不同的離開時間段,即的不同取值,有相應的約束如式(11)-(13),其中,是清空排在公交車輛n 前面的所有車輛需要的時間,是0-1 變量,值為0 是表示公交車無停車,值為1 是表示公交車有停車,E 是足夠大的常數。

交叉口信號控制方案的相關約束如式(14)-(17)。綠燈的調整時間不能過大,需要滿足最大綠最小綠的約束,如式(14)和(15)。此外,各相位的綠燈時間需要滿足相位結構的相關約束,如式(16)和(17)所示。

4 案例分析
為驗證上述優化模型的有效性,以深圳市公交線路M390 路(頌德花園公交總站→石廈南總站)在福田中心區內路徑為例,基于VISSIM 微觀仿真模型及其COM 接口,搭建“軟件在環”的測試框架,對模型進行仿真分析。
4.1 數據輸入
對測試公交線路及其所在的路網建立VISSIM 微觀仿真模型,如圖4 所示,該路網范圍內,公交線路M390全長約4.5 公里,沿途共經過8 個公交站點和11 個信號控制交叉口。為避免對公交實施信號優先對其他社會車輛造成過大的影響,優化過程中約束各信號交叉口的各相位綠燈時間調整不超過10 秒。

圖4 測試案例的VISSIM 仿真模型
仿真相關的參數設置如下:
預熱時間:15min;
公交車發車數量:8 輛;
公交車發車間隔150s,站點駐站時間服從均值為60s的正態分布;
輸入流量為改路網區域平峰時段的流量;
仿真時長:從0s 至最后一輛公交車駛離路網。
4.2 結果分析
通過VISSIM 輸出公交車的相關運行情況,對模型優化的效果進行評價。若不對公交進行優化控制,那么8輛公交車的運行軌跡時空圖如圖5 所示,其中橫坐標是以秒為單位的仿真時間,縱坐標是公交線路途徑的信號路口的站點的距離,圖中曲線為公交車運行軌跡,信號交叉口所在位置深淺灰色塊對應公交相位的紅燈和綠燈在信號交叉口所在位置,標注了每一時刻公交車通行相位的信號燈顏色。單輛車的全程的平均行程時間1163.75 秒(從進入路網到行駛至最后一個站點),其中第2 輛和第3 輛、第7 輛和第8 輛存在嚴重的串車現象,基本上是全程緊鄰行駛。
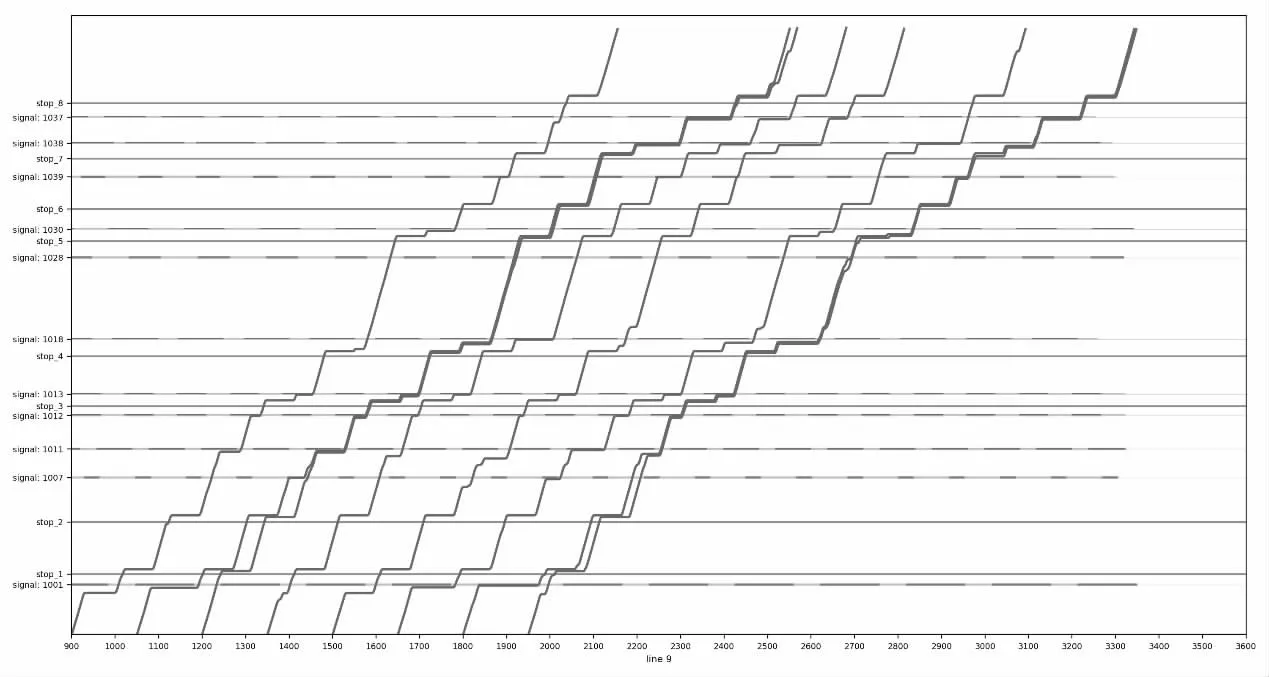
圖5 無優化控制的公交運行軌跡圖
保持VISSIM 的相關輸入不變,利用本研究提出的優化模型,實時優化公交途徑的信號交叉口控制方案等,得到這8 輛公交車的運行軌跡時空圖如圖6 所示,全部公交車輛的到達站點的車頭時距保持間隔均勻的狀態,車頭時距標準差從101.88 秒降至16.69 秒,車頭時距的均衡性提升83.62%,此外,公交車在全線路的平均行程時間也降至1024.25 秒,延誤減少了11.99%。由于優化過程中,各信號交叉口各相位的綠燈調整時間不超過10 秒,從公交軌跡的排隊情況也可以看出,實施公交信號優先并未對其他社會交通造成過大的負面影響,本研究提出的優化模型顯著提高了道路交通總體效益。
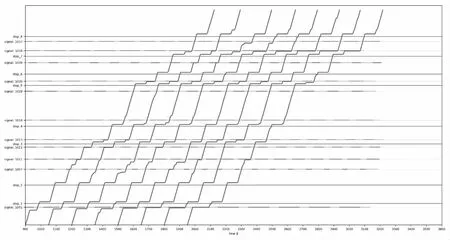
圖6 進行優化控制的公交運行軌跡圖
統計每輛公交車的進行優化控制和不進行優化控制的全線路行程時間,如圖7 所示,不進行優化控制公交車的總體行程時間大于進行優化控制的場景,此外,不進行優化控制時,各公交車的行程時間有較為明顯的波動,而進行優化控制時,各公交車在全線路的行程時間則相對穩定。
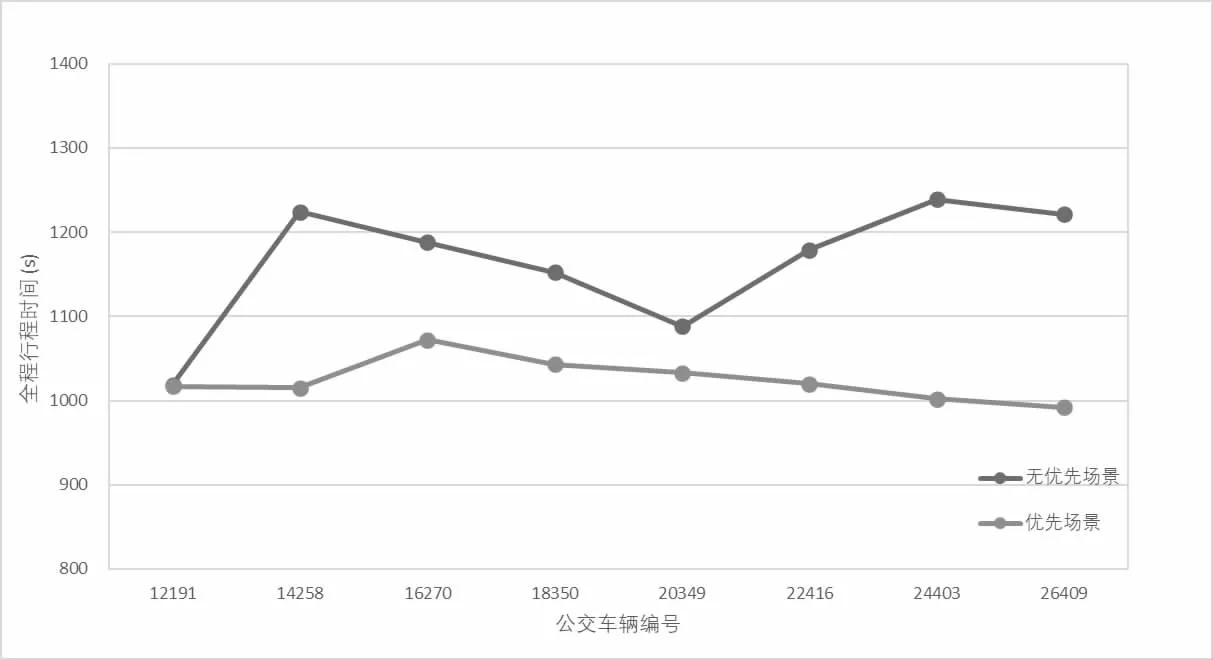
圖7 公交車全線路行程時間對比
5 結論
本研究融合公交信號優先、公交駐站時間控制、車速引導等多種控制手段,在車路協同環境下對公交車進行實時動態的精準控制,以公交車車頭時距均衡性為主要優化目標,同時提高公交運行效率,并盡量避免對其他社會車輛形成過多的影響。案例結果表明,在對其他社會車輛影響較小的情況下(相位綠燈調整時間不超過10s),本研究建立的優化模型能夠顯著提高公交車頭時距的均衡性,車頭時距的標準差降低83.62%,此外公交車的整體延誤也有所降低,為11.99%,各公交車在全線路行程時間也更為穩定。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00