C120S無人船測量系統在水下地形測量中的應用
2022-06-24 08:38:58董燕楓
廣西水利水電 2022年3期
董燕楓
(安徽省水利水電勘測設計研究總院有限公司,合肥 230022)
目前水下地形測量主要以GNSS接收機為平面定位設備,以測深儀為測深設備,根據水面高程和水深數據來計算水下地形點高程[1],所用船只多為燃油機動船或橡皮船。近年來,儀器廠商通過將GNSS、測深儀與無人船集成,打造了無人船測深系統,同時還搭載網絡通信系統、操控系統、避障系統、攝像系統,實現了外業水下測繪的自動化和可視化。無人船測量系統已逐漸應用于水下地形測量和河道斷面測量、水文監測等領域。本文以無為市花渡河、環城河治理工程為例,采用科微智能公司C120S型號無人船對某水域水下地形進行測量,得到了較高精度的水下地形測量數據,表明了無人船水下測量的可行性。
1 無人船測量系統和工作原理
1.1 系統組成
C120S無人船測量系統包括測量系統和船體控制系統(見圖1)。測量系統集成了測量船、GNSS接收機、數字測深儀、供電系統、主控系統、推進系統和避障雷達、攝像頭等。采用RTK內置電臺方式定位時,岸上還要架設基準站。船體控制系統由通信基站、無人船遙控器以及安裝有導航測深軟件的筆記本電腦等組成。若采用4G 或5G 網絡模式與無人船連接,通信基站也可取消。
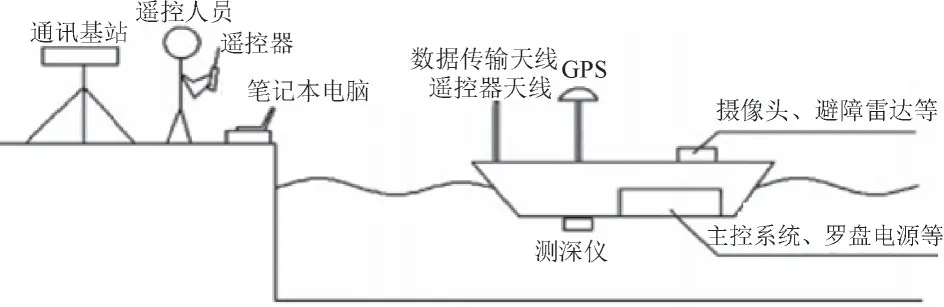
圖1 無人船測量系統
1.2 工作原理
無人船測量系統采用GNSS-RTK 來獲取水下地形點的平面坐標。水深測量由安置在船上的測深儀完成,換能器將電脈沖轉換成機械振動,并以聲波的形式垂直向水底發射。聲波到達水底后,部分會被反射回來。換能器接收后,可計算出聲波的傳播時間t。根據聲速v和傳播時間t可計算出水深h=(v×t)/2。
測深軟件顯示測量時刻的水深并顯示回波圖形。C120S型無人測量船靜態吃水為固定值0.2 m,GNSS 天線頂端到水面的距離為0.5 m。通過GNSRTK技術可獲得實時的水面高程H水面,進而可以計算出水底高程H水底=H水面-h-0.2。
2 應用實例
2.1 測區概況
無為市花渡河、環城河治理工程內部水系為環城河及花渡河故道,所涉外部水系為花渡河以及西河。為了解工程區的地形地貌情況,需對河道、堤岸以及建筑物進行地形測量。工程區域總水域面積為2.0 km2,河寬200 ~300 m,環城河及花渡河故道,水深較淺,花渡河故道沿線圩堤較多,環城河兩岸已建成城市公園,河中水下噴泉較多,測區沿線有9座橋梁,2處涵洞,傳統載人燃油機動船不易搬運、而水域面積太大橡皮船效率太低。無人船體積小,重量輕,便于搬運,非常適合在測區作業。
2.2 測量實施
使用云影C200 型電動垂直起降固定翼無人機系統搭載RIEGL VUX-120 機載激光雷達獲取測區的數字正射影像、數字高程模型和地面點高程,完成岸上部分的地形圖繪制和水域水涯線的繪制。
以測區數字正射影像成果作為工作底圖,在CAD中進行無人船自動航行線路設計(見圖2)。由于正射影像分辨率高、現勢性強,正射影像中水涯線、淺灘礁石、水下噴泉、水生植物等清晰可見,復雜水域無人船測深的測線布設問題得到有效解決[2]。布線時應考慮船體大小、船速、轉彎半徑等因素,不可使測線端點距離岸邊太近。根據測圖比例尺要求每10 m布置一條測線,線路設計完成后導入無人船導航軟件中。

圖2 自動航行線路設計避開水下噴泉
在開始測量工作前,完成船上的GNSS-RTK 定位系統和遙控通信設備與岸上的控制系統的連接,設置安全的Home 點,保證無人船在電量不足或其他意外情況時能夠安全返航。在岸上利用電腦端導航軟件和遙控器控制無人船的航行和數據采集工作。密切觀察無人船航行,遙控切換自動和手動模式。在淺灘、近岸、礁石分布較多的水域切換手動模式,使用遙控器控制無人船測量。在水生植物分布較多的區域,使用橡皮船和測桿人工測量。測深軟件為HiMAX軟件,完成一塊水域測量后可現場檢查成果質量、剔除粗差等,在CASS繪圖軟件中生成水下地形等高線草圖來判斷數據質量。無人船水下測量現場見圖3。

圖3 無人船水下測量現場
3 單波束水深數據處理
單波束水深數據處理采用HiMAX測深儀軟件,將每條測線按照“水深取樣—數據改正—潮位改正—數據預覽”4 個步驟處理得到水下地形的高程信息,外業采集的原始數據即轉換為CASS 制圖軟件可編輯數據。
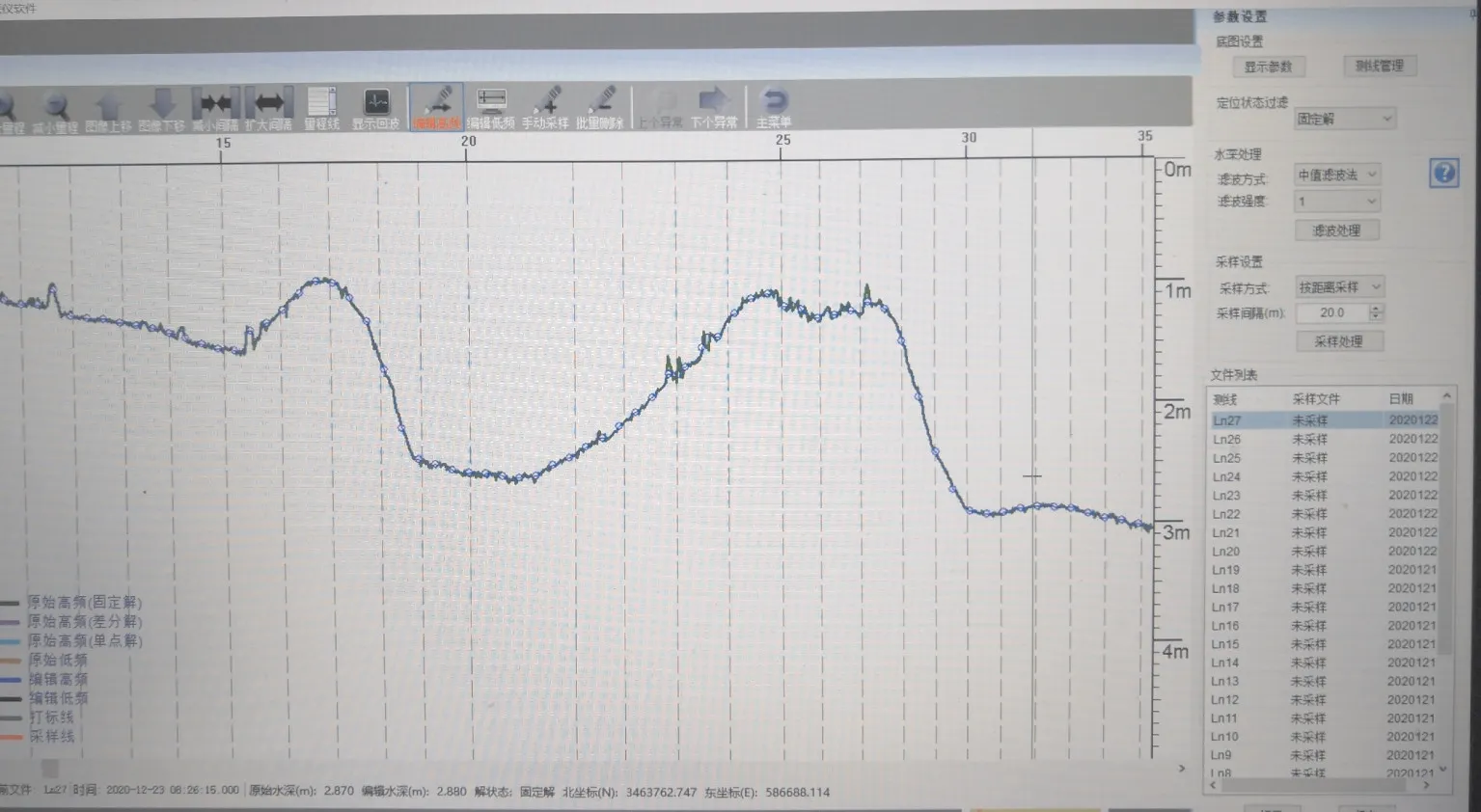
圖4 水深數據取樣
水深測量不是在靜止的情況下完成的,在測量過程中會不可避免地受到魚群、水草、船尾流氣泡、回波二次反射等各種因素的干擾,這時水深會出現異常點[3]。在數據處理時,按天依次對每個測線進行處理。在水深取樣時,定位狀態過濾選擇固定解,水深處理方法選擇中值濾波法,按照回波趨勢修正水深,按距離采樣,采樣間隔選擇2 m(見圖4)。
采樣完成后再進行回放檢查(見圖5),以保證水深數據質量。
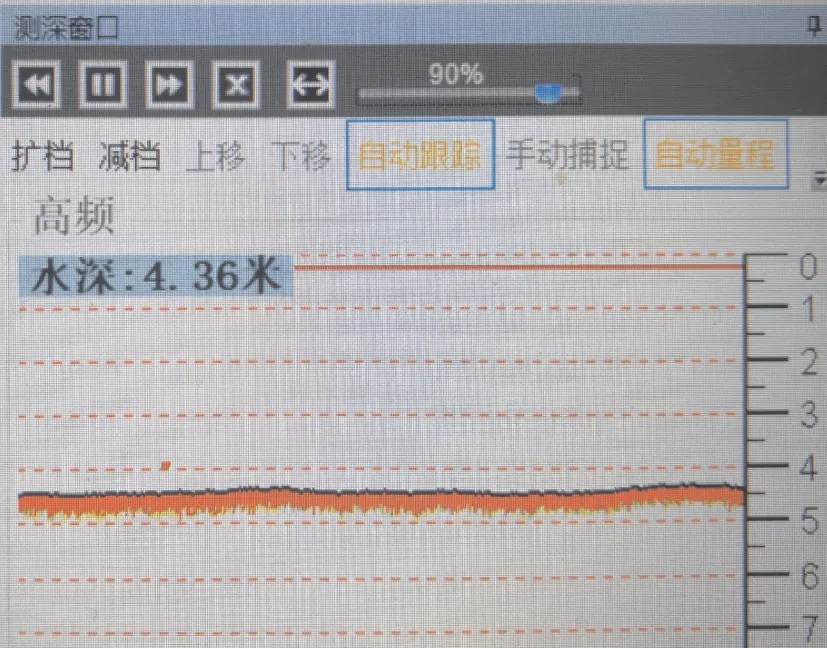
圖5 水深數據回放檢查
水深取樣完成后,再進行各項改正,包括轉換參數改正、延遲改正、吃水改正、聲速改正等。數據處理時,使用實時水面高程,可不進行潮位改正。各項改正完成后,導出CASS 繪圖軟件可直接編輯的數據格式,進行數據預覽,查看水下地形點的分布情況,查缺補漏。
4 精度分析
每段區域測量完成后,即對測區進行檢查斷面測量。檢查斷面與測深斷面垂直相交。在剔除粗差后,共采集有效水下地形點97 963點。經計算本工程檢查線長度占測深線長度的7%。經統計檢查線與測深線相交處圖上1 mm范圍內水深點的深度檢查互差情況如表1所示。

表1 深度檢查互差表 m
依據《水利水電工程測量規范》(SL 197-2013),當水深小于20 m時互差限差為±0.4 m[4]。測區最深處為7.11 m,水深重合點超限點為3 點,合格率為99.6%,平均互差為0.05 m,互差絕大部分集中在0~0.1區間,數據質量滿足規范要求。
影響無人船測量精度的主要因素是測量船的姿態測量引起的誤差、換能器相對位置變化引起的誤差、延遲誤差、聲速傳播誤差等[5]。無人船與載人船相比體積小、重量輕,當風浪較大,船速較快時,無人船的姿態、換能器相對位置變化較大,對水深測量精度影響較大。因此,要在風浪較小,船速適當的情況下作業,使無人船保持良好的姿態。聲速傳播誤差與延遲誤差對無人船和載人船影響基本相同,只要船速適當、水面波動不大,無人船測量和載人船外業測量精度基本相當。
5 結語
基于無人船測量技術,進行了無為市花渡河、環城河水下地形測量并進行了精度分析。誤差分析發現,主測線水深與檢測線水深互差具有較高的合格率,說明無人船測量誤差已控制在合理范圍內,是一種可靠的水下地形測量方法。與傳統載人船測深技術相比,無人船測量受水面波動誤差、姿態誤差影響大于載人船。在水草、漁網較多的復雜水域環境局限性高,無人船水下地形測量受到一定限制,然而由于無人船測量具有機動靈活、效率高、危險性低等優點,長遠來看無人船測量仍然具有較廣的應用前景。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45