高加速精密運動平臺前饋控制研究*
2022-06-24 03:10:38胡永珊羅志良劉志軍謝求泉柳志林
機械工程與自動化 2022年3期
關鍵詞:規劃
胡永珊,羅志良,劉志軍,文 虹,謝求泉,柳志林
(江西工業工程職業技術學院 機械工程學院,江西 萍鄉 337000)
0 引言
在微電子制造裝備的高加速精密運動平臺上,每個軸的加速度均達到10g,此時系統需要輸出一個非常大的響應來提供加速度。通常我們為了實現高速高精度,常采用增大控制系統剛性的方法,但這樣容易導致控制系統因剛性過大而產生振動,影響精密運動平臺的快速定位動態響應和穩態整定性能,也會給系統帶來時滯效應[1-3]。為了使控制系統在動態跟隨過程中和進入穩態整定后有較高的位置跟隨精度,有學者提出采用前饋控制來解決該問題。
1 前饋控制
前饋控制算法是一種開環控制,可以補償指定的擾動量,也被稱為擾動補償控制。在實際應用中通常會根據擾動信號作用的大小和方向的變化提前采取一些適當的措施來對擾動偏差進行補償;當系統出現擾動時,控制器就能根據測量所得的擾動信號給出相應調節,及時補償被控對象因擾動所造成的波動。在提高系統響應和解決時滯問題時,前饋控制比反饋控制較為及時和有效,特別適用于控制系統需要迅速產生一個大加速度運動指令的情況,常用于工業上點到點運動的過程控制。
2 五階S曲線速度規劃
在滿足動力學約束、軌跡幾何特性和誤差約束的情況下,運動規劃可以確保運動平臺在整個過程中快速、準確、平穩地到達目標位置。在控制學中常用的運動規劃有T曲線速度規劃和S曲線速度規劃,如圖1和圖2所示。
對比圖1和圖2可知,在加速過程中,與T曲線速度規劃相比,S曲線速度規劃可以有效地避免加速度產生突變,從而大大地減小了運動過程中的沖擊和震蕩。所以在高速高精度系統中的加減速控制算法通常選用S 曲線速度規劃。
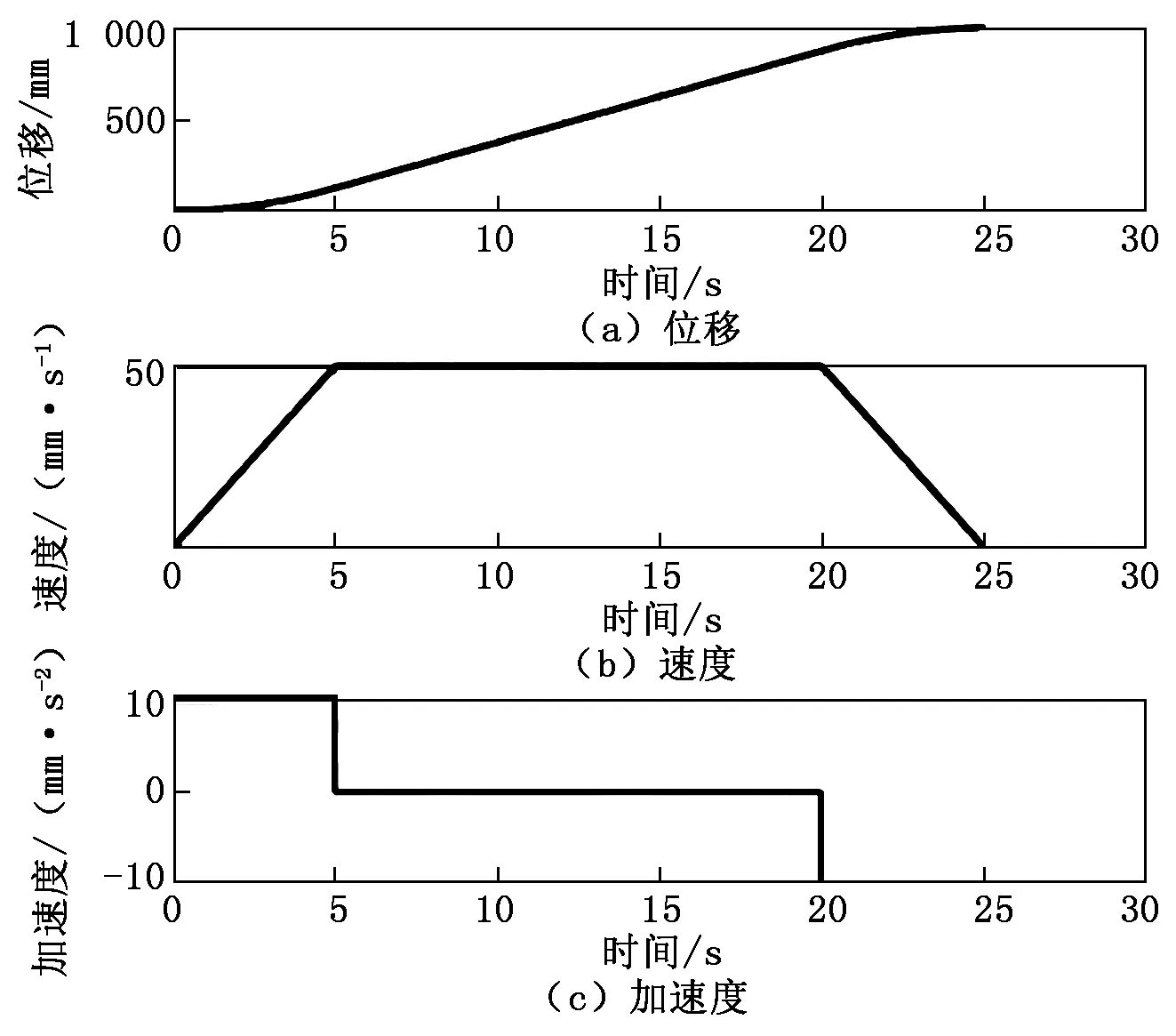
圖1 T曲線速度規劃
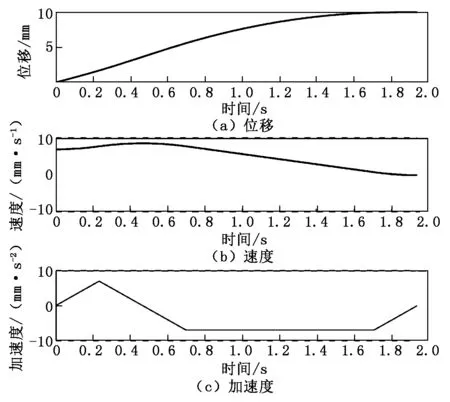
圖2 S曲線速度規劃
研究表明,S曲線速度規劃的階次越高,對系統產生的沖擊和震蕩會越小,但是其控制算法的運算規則會更加復雜。目前在高加速高精密運動系統中常采用五階S曲線速度規劃軌跡。五階S曲線位移y(t)及其各階導數的表達式如式(1)所示:
(1)

五階S曲線速度規劃如圖3所示。
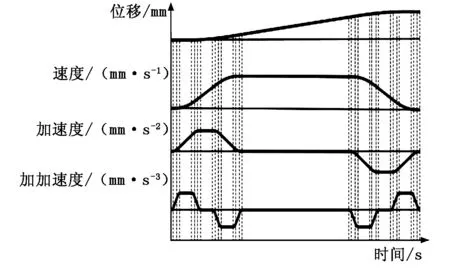
圖3 五階S曲線速度規劃
由式(1)和圖3可知,五階S曲線速度規劃在加速度突變時是光滑過渡的,意味著對系統產生的沖擊和震蕩將會更小。
3 前饋控制器設計
在閉環控制中,系統的動態跟隨誤差和穩態整定時間主要是由輸入信號和系統響應造成的。而前饋控制可以加快系統的響應,有效地減小動態跟隨誤差和穩態整定時間。
前饋控制一般采用速度前饋和加速度前饋兩種形式,由于高加速高精密運動系統要求瞬間提供一個高速高加速高精密的運動,傳統的前饋控制方法難以滿足要求,所以本文提出基于五階S曲線速度規劃的控制算法,引入加加速度前饋、加速度前饋和速度前饋,從而改善系統的運動性能,其控制器框架結構如圖4所示。
圖4中,Kvff為速度前饋增益,Kaff為加速度前饋增益,Kjff為加加速度前饋增益。
在高加速高精密運動平臺上,使用圖4所示的控制框架,并完成一個位移為2 mm、速度為850 mm/s、加速度為80 m/s2的點到點運動,對三個前饋增益進行調試,其數據如表1所示,運動過程中的動態跟隨誤差和穩態整定時間如圖5所示。
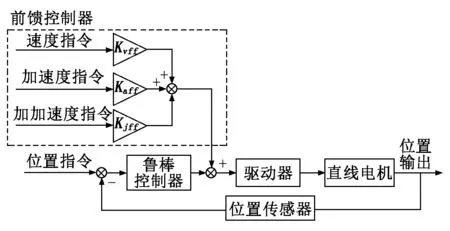
圖4 前饋控制器框架結構

表1 運動過程中動態跟隨性能和穩態整定性能
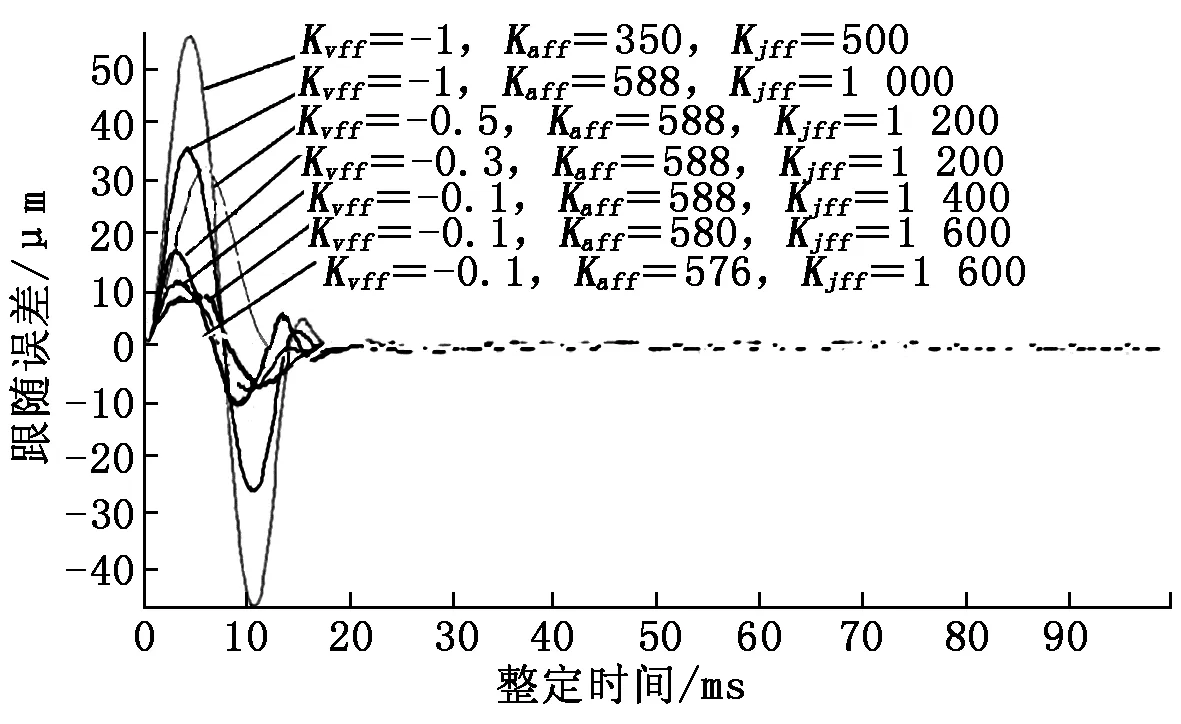
圖5 運動過程中動態跟隨性能和穩態整定性能
圖6為速度前饋增益為-0.1、加速度前饋增益為576、加加速度前饋增益為1 600時,高加速高精密運動平臺運動過程中的動態跟隨誤差和穩態整定時間。
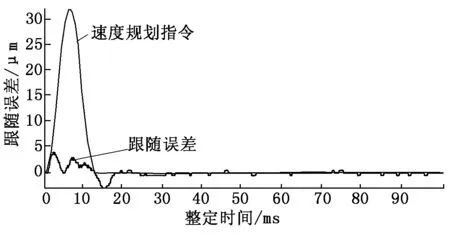
圖6 Kvff=-0.1、Kaff=576、Kjff=1 600時高加速高精密運動平臺的動態跟隨誤差
4 結論
本文通過對控制器輸出指令進行五階S曲線速度規劃,并引入加加速度前饋增益,在其他條件不變的情況下對運動系統的運動參數進行微調,有效地解決了高加速精密運動平臺快速定位的動態響應和穩態整定性能問題,提高了高加速精密運動平臺的運動性能和質量。
猜你喜歡
房地產導刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:34
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41