基于PLC 的食品烘干箱溫度控制系統設計與試驗
2022-06-24 06:57:52張可欣李成軍陳忠加袁湘月
保鮮與加工 2022年6期
張可欣,李成軍,陳忠加,袁湘月
(北京林業大學工學院,北京 100083)
溫度作為一個十分重要的物理量在工業生產、醫療衛生以及食品加工等領域都被密切關注。對于食品加工行業而言,食品含水量過高會導致其變質[1],因此,對食品進行烘干處理有利于運輸、儲存與后續加工[2]。在干燥過程中,為實現產品含水量的有效降低[3],對溫度的控制非常重要[4]。為提升產品質量,延長設備壽命,提高生產效率和降低能耗[5],采用化石能源燃燒供熱來控制溫度的方式已逐漸被淘汰[6],取而代之的是由溫度控制器作為核心元件的烘干箱。
譚新圓等[7]為實現綠色節能和得到高品質糧食的干燥目標,利用單片機判斷烘干機內干燥狀態,從而有效控制加熱功率。馬林森[8]將單片機作為糧食烘干機的溫度控制器,實現了溫度與濕度的自動控制,且大大節省了人工成本。王佳寶等[9]將可編程邏輯控制器(Programmable logic controller,PLC)應用于棉籽烘干機的溫度控制系統之中,結果表明:由PLC 所控的制溫度系統能大幅度提升棉花的質量。ünlü 等[10]利用PLC 控制南瓜籽烘干機的風速、溫度和濕度,能在提升南瓜籽質量的同時有效縮短干燥時間。相比于人工經驗控制或傳統電氣元器件控制,自動化控制能夠準確按照要求高效地完成干燥,進而達到較為理想的干燥效果[11]。
針對烘干時溫度控制中存在的大慣性、大滯后、非線性等問題[12],一些學者將溫度控制算法(如:傳統比例-積分-微分(Proportion-integral-derivative,PID)控制、模糊控制、神經網絡控制和遺傳算法等[13])運用于控制中。它們能有效地解決溫度控制過程中所存在的問題,并大大提升溫度控制的精度。
靳淑祎[14]通過多層前饋(Back propagation,BP)神經網絡控制茶葉烘干機溫度系統,研究表明:采用此方法對溫度進行控制能減小超調量,從而實現恒溫控制。Li 等[15]為提高糧食烘干機的溫度控制精度,采用神經網絡算法進行控制。Maleki 等[16]采用遺傳算法和神經網絡結合的方式對烘干機進行控制,進而達到提升產品質量的目的。
除神經網絡控制和遺傳算法以外,PID 控制算法以及模糊控制算法都被廣泛地運用在烘干機的溫度控制之中。尹協鎮等[17]在谷物烘干機溫度控制中采用PID 控制算法對冷熱風進風比例進行調節,使烘干的熱風溫度能快速、穩定的保持在設定溫度附近,減少了因熱風溫度波動大而造成的不必要損失。魏詩琴等[18]將PID 控制算法運用于茶葉烘干機中,結果表明,相比于人工控制,PID 控制能實現較高的控制精度,并很好地減小穩態誤差。Dai 等[19]利用改進的PID控制算法提高了糧食烘干機溫度控制系統的抗干擾能力,并增強了系統的魯棒性。陳洪軍等[20]采用模糊控制算法于糧食烘干機的溫度控制系統中,使得糧食烘干過程中具有良好的魯棒性和控制穩定性。許才花等[21]運用模糊控制算法對糧食烘干機的溫度控制系統進行控制,有效地解決了溫度控制過程中存在的非線性、干擾噪聲和大滯后等問題。Chen 等[22]的研究表明:采用模糊控制算法的烘干機擁有超調量少,響應速度快,魯棒穩定性好等特點。
由此可見,雖然傳統PID 控制算法和模糊控制算法各有一定的優點,但對于控制溫度系統的效果而言,兩種控制算法均仍然存在不足。PID 控制算法容易產生超調和振蕩,且動態響應特性差[23]。模糊控制雖然可以減少控制系統的振蕩,卻易產生較大的穩態誤差[24]。因此,將傳統PID 控制算法與其他算法結合是一種必然的趨勢。模糊PID 復合控制算法與模糊PID 切換控制算法作為PID 控制算法和模糊控制算法的有效結合,將其運用到進行溫度控制中,控制效果在一定程度上優于PID 控制算法和模糊控制算法,且系統能克服參數的自整定問題,實現超調量小、調節時間短、穩態誤差小的性能[25-27]。
沈艷河等[28]設計的以模糊PID 復合控制器為核心的食品烘干機能夠顯著提高熱風溫度的控制精度,具有較強的自適應能力。Jun 等[29]采用模糊PID 復合控制算法對木材烘干機溫度控制系統進行控制,能實現較好的穩態特性。林榮川等[30]將模糊PID 切換算法用于茶烘焙機的溫度調節,使得在小超調的情況下能得到最短的溫度調節時間。
為比較PID 控制、模糊控制、模糊PID 復合控制、模糊PID 切換控制4 種控制算法對提升烘干箱溫度控制精度的影響,使用西門子S7-200 SMART PLC進行程序設計,并采用昆侖通態觸摸屏實現人機交互。同時,為達到提高烘干箱溫度控制精度的目的,本研究在對傳統PID 控制與模糊控制兩種控制算法進行結合并加以改進的基礎上,設計了兩種不同結構形式的模糊PID 控制算法,即模糊PID 復合控制算法和模糊PID 切換控制算法。為更加直觀清晰地比較上述4 種控制算法對提升烘干箱溫度控制精度的影響,采用梯形圖語言對上述4 種控制算法進行了表達及PLC 控制烘干箱的試驗驗證。
1 烘干箱硬件電路設計
根據烘干箱的設計要求,對其硬件進行選型,并按照烘干箱原理(圖1)對硬件電路進行搭建(圖2)。
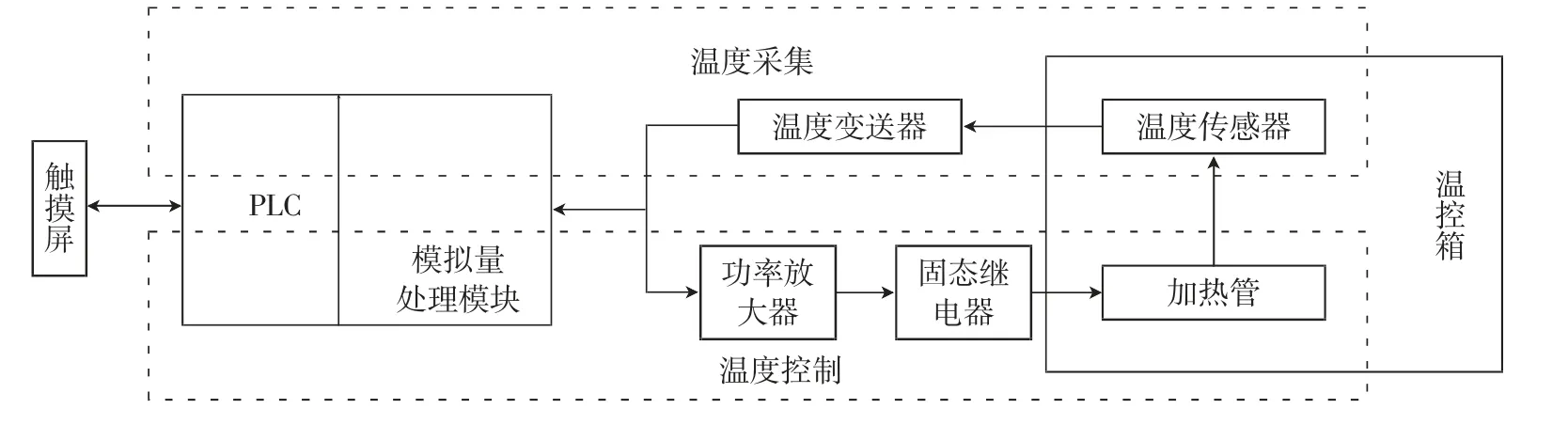
圖1 烘干箱原理圖Fig.1 Schematic diagram of drying box
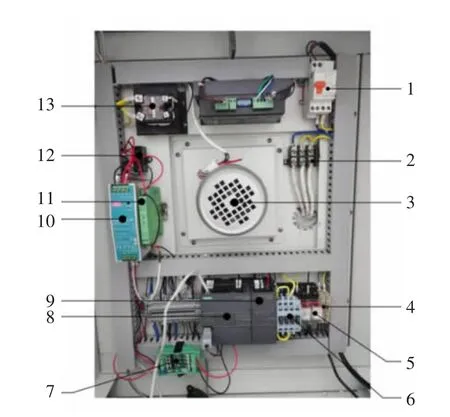
圖2 烘干箱硬件實物圖Fig.2 Diagram of drying box hardware
烘干箱溫度的采集方式為:溫度傳感器將得到的信號傳給溫度變送器,使得信號轉變為模擬量處理模塊能夠進行處理的4~20 mA 的電流信號。隨后,經模擬量處理模塊處理為PLC 可處理的數字量。在溫度控制中,用觸摸屏對溫控箱進行相應的啟動和停止。程序啟動后,PLC 的輸出端進行輸出,電流通過中間繼電器線圈時,則其常開觸點閉合,進而使電流通過交流接觸器線圈。此后,交流接觸器的常開觸點閉合。PLC 根據溫度信號利用已經編好的程序對溫度進行相應的控制,輸出可進行脈寬調制的數字量信號驅動固態繼電器的開閉,進而控制加熱管加熱。同時,通過觸摸屏與PLC 之間的通訊可以實現對溫控箱溫度的監控以及設定溫度值的修改。
2 軟件程序與觸摸屏界面設計
由于本研究使用西門子S7-200 SMART PLC 對溫控箱的溫度進行控制,所以用STEP7-Micro WIN SMART 的梯形圖進行軟件程序的設計。其主要流程圖見圖3。
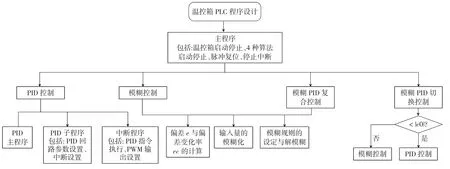
圖3 程序整體流程圖Fig.3 The overall flow chart of the program
2.1 PID 控制算法
PID 控制算法原理見圖4。
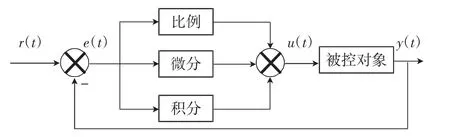
圖4 PID 控制算法原理Fig.4 The principle of PID control algorithm
PID 控制算法是將給定值r(t)與輸出值y(t)的偏差e(t)通過比例、積分、微分的線性計算得到控制器的輸出值u(t),進而控制被控對象。借助STEP7-Micro WIN SMART 的PID 指令進行PID 控制算法的軟件設計。PID 控制算法主要由3 部分組成:PID 主程序、PID 子程序、中斷程序。在PID 子程序中給PID參數表進行相應的賦值并設置中斷0 相應的參數。在中斷中,調用PID 指令并進行相應的輸出。采用試湊法得到比例系數、積分系數和微分系數分別為3、0.002、23。PID 部分程序如圖5 所示。
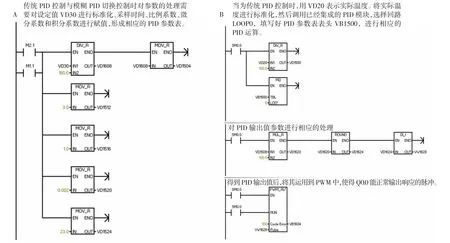
圖5 PID 部分程序Fig.5 The part program of PID
2.2 模糊控制算法
對于模糊控制算法而言,是類似于人腦的模糊性思維而提出的,其原理見圖6。
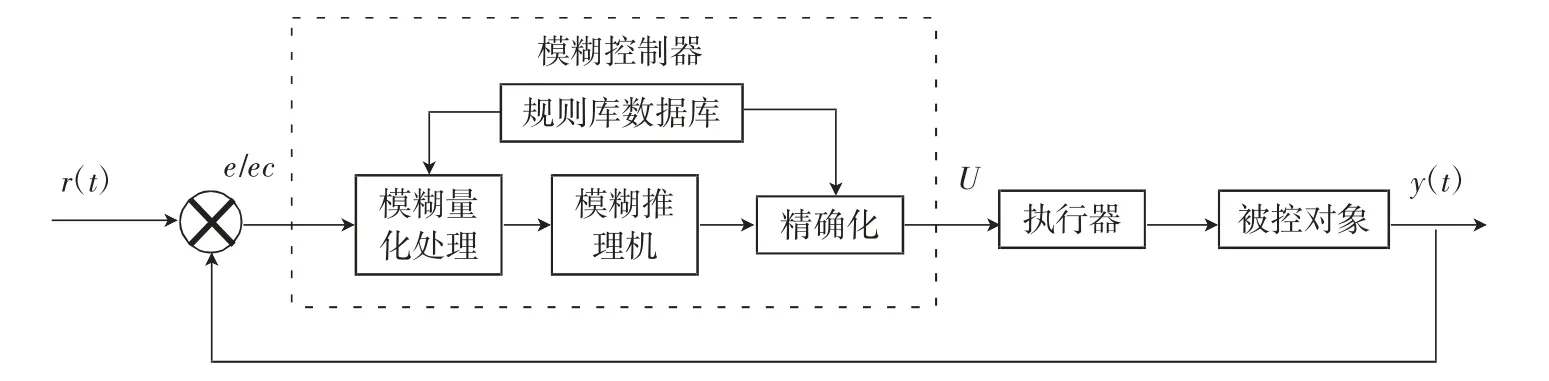
圖6 模糊控制算法原理Fig.6 The principle of fuzzy control algorithm
選取二維模糊控制器,即通過偏差e(t)及偏差的變化率de(t)/dt,再通過模糊控制得到輸出值u(t)來控制被控對象。根據實際情況,為輸入輸出量選擇的模糊論域與基本論域[a,b]見表1。同時,選取輸入輸出量的模糊語言集合均為{NB,NM,NS,ZO,PS,PM,PB}。

表1 模糊控制參數Table 1 Parameters of fuzzy control
由于三角形隸屬度函數計算方便簡單,所以模糊化后的偏差E、偏差變化率EC 以及輸出值U 隸屬度函數均選用此函數。根據相應的控制規則,通過MATLAB 模糊控制器,可得到模糊規則對應的模糊控制輸出值(見表2)。
由于PLC 對于負數的處理較為復雜且不方便進行計算,因此,將輸出值U 的數值大小加3 使其取值范圍從原來[-3,3]變為[0,6],并在程序中將表2 的數據按照由上到下、由左到右的順序填入相應存儲區域。為準確尋找模糊化的偏差E 和模糊化的偏差變化率EC 相應數值時所對應的輸出值U 的大小,采用偏移尋址與間接尋址相結合的方式進行尋址,即表首地址+(VW200+6)×4+(VW300+6)×52。在此尋址表達式中,VW200 和VW300 分別表示存儲偏差和偏差變化率的模糊語言數值量的地址。根據在程序中模糊控制輸出值表的對應關系和PLC 變量存儲空間大小,通過表首地址+(VW200+6)×4+(VW300+6)×52 可進行尋址,通過尋址得到的數值將存入VD1120 中(圖7)。
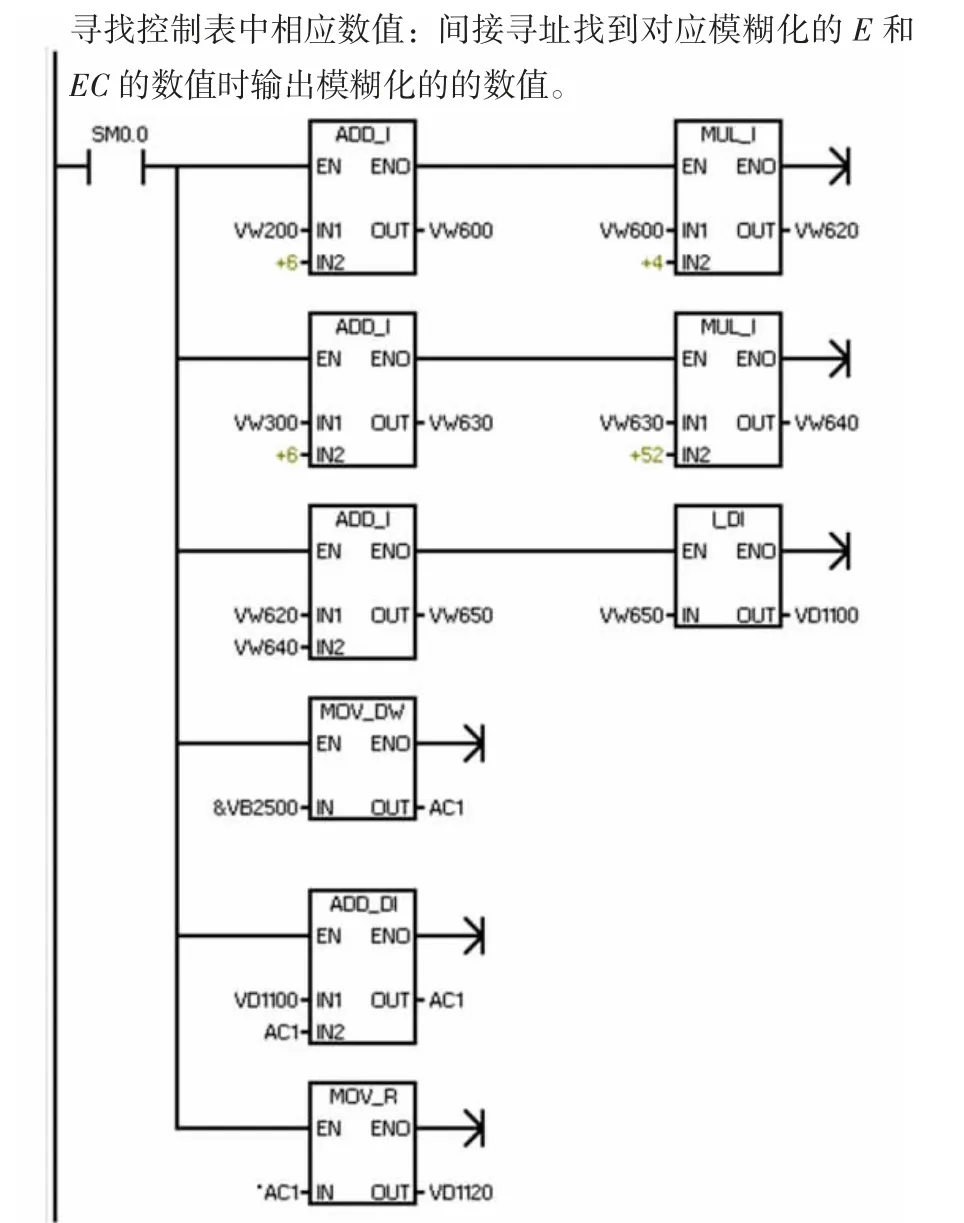
圖7 輸出量尋址程序Fig.7 Output addressing program
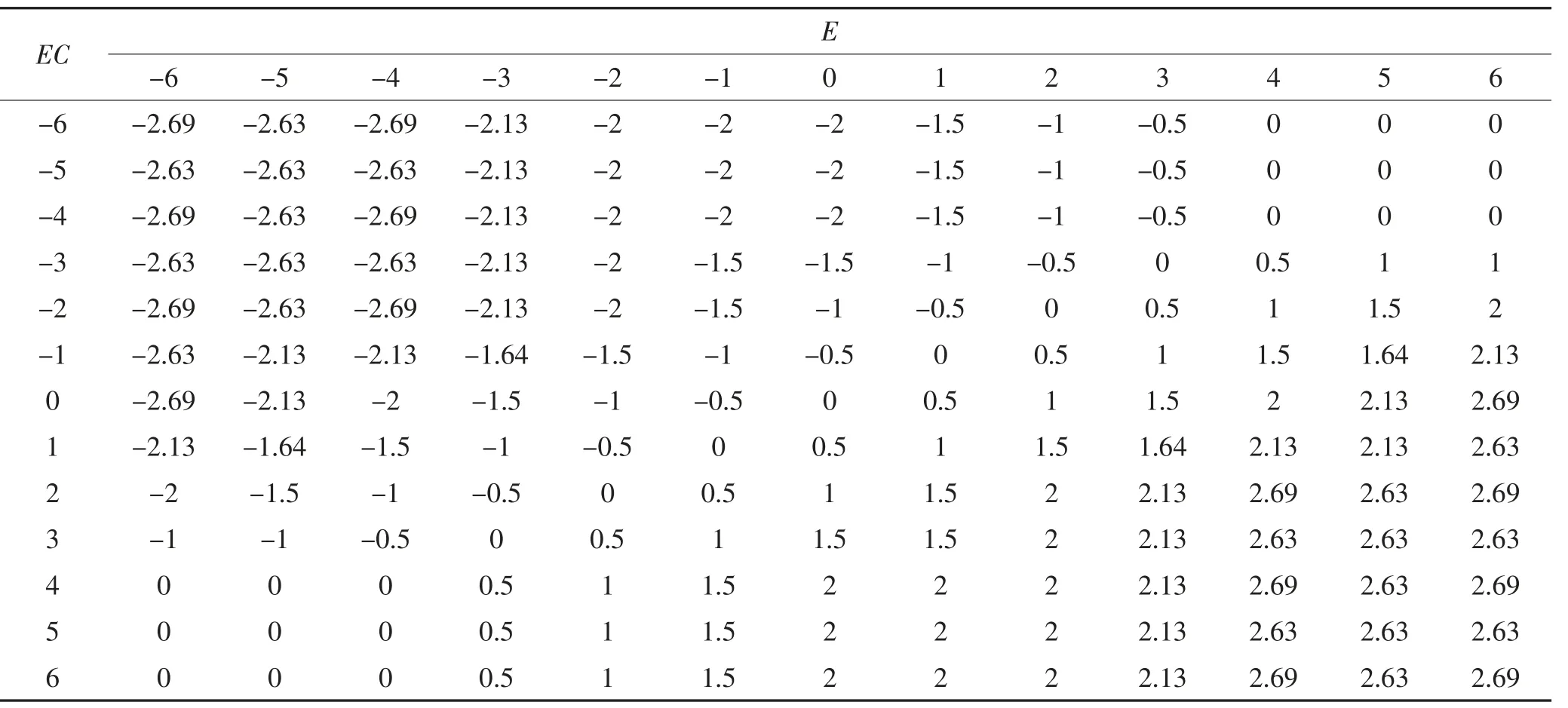
表2 模糊控制輸出值Table 2 Output values of fuzzy control
2.3 模糊PID 復合控制算法
對于模糊PID 復合控制算法而言,由其原理可知,其模糊控制器是將輸出的比例系數、積分系數、微分系數的變化量給PID 控制器進行處理,進而達到模糊PID 復合控制。其原理如圖8 所示。
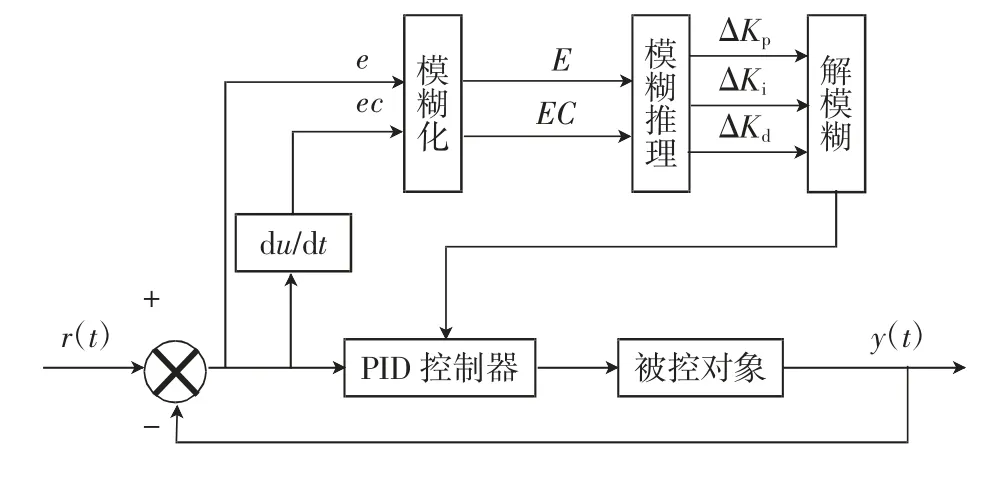
圖8 模糊PID 復合控制原理圖Fig.8 Principle diagram of fuzzy PID compound control
同模糊控制設計步驟相同,首先需要對偏差e(t)、偏差變化率de(t)/dt 以及3 個輸出的基本論域[a,b]和模糊論域進行相應的設定(表3)。同樣選取模糊語言集合{NB,NM,NS,ZO,PS,PM,PB}以及采用三角形隸屬度函數,根據相應的控制規則,通過MATLAB模糊控制器,可得到其對應的模糊控制輸出值,表4所示為比例系數的輸出值。

表3 模糊PID 復合控制參數Table 3 Parameters of fuzzy PID compound control

表4 模糊PID 復合控制KP 輸出值Table 4 The KP output values of fuzzy PID compound control
由于PLC 對于負數的處理較為復雜且不方便進行計算,因此,將比例系數、積分系數與微分系數的數值加6 使得取值范圍變為[0,11],并在程序中將表中數據按照由上到下、由左到右的順序填入相應存儲區域。為準確尋找模糊化的偏差E 和模糊化的偏差變化率EC 相應數值所對應的3 個系數的大小,采用偏移尋址與間接尋址相結合的方式進行,即表首地址+(VW200+6)×4+(VW300+6)×52。將通過尋址得到比例系數、積分系數與微分系數的數值分別存入VD1120、VD1226、VD1320 中。圖9 為△KP尋址程序。
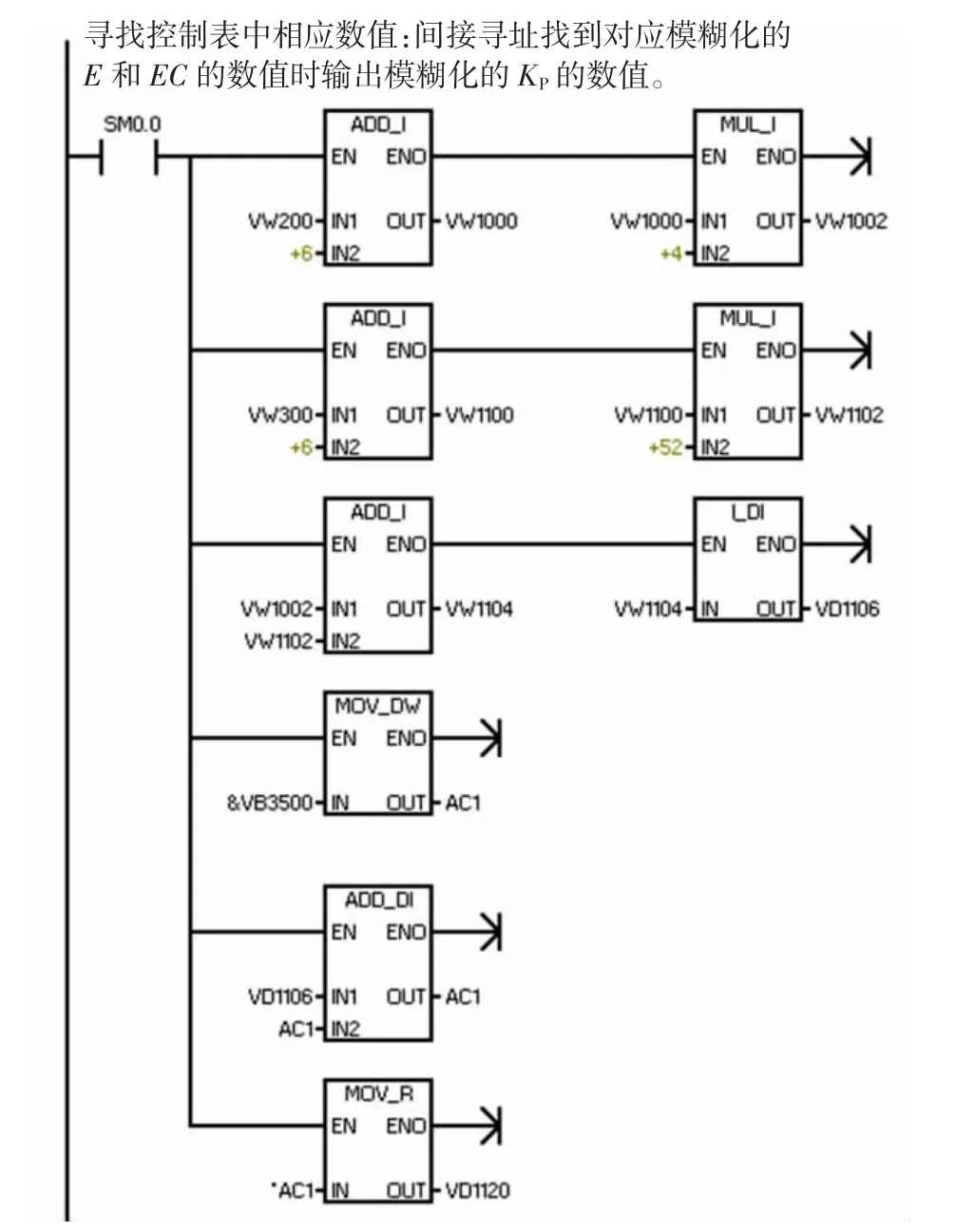
圖9 △KP 尋址程序Fig.9 △KP addressing program
2.4 模糊PID 切換控制算法
模糊PID 切換控制算法的軟件設計只需通過閾值條件在兩種算法中切換,其余模糊控制算法以及PID 控制算法的軟件程序與上文相同。原理圖如圖10 所示。

圖10 模糊PID 切換控制原理圖Fig.10 Principle diagram of fuzzy PID switching control
根據下式和試驗調試結果,設定閾值為0.14 ℃,當偏差的絕對值小于0.14 ℃時,執行PID 控制;當偏差的絕對值大于0.14 ℃時,執行模糊控制。模糊PID切換控制程序如圖11 所示。

圖11 模糊PID 切換控制程序Fig.11 The program of fuzzy PID switching control
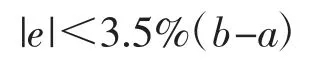
式中:e 表示偏差,℃;a 表示偏差基本論域下限值,℃;b 表示偏差基本論域上限值,℃。
2.5 觸摸屏界面設計
根據溫控箱溫度控制的需要,制作的觸摸屏界面主要包括:首頁、主菜單、功能界面、用戶管理界面、報警信息界面、溫度記錄曲線(見圖12)。
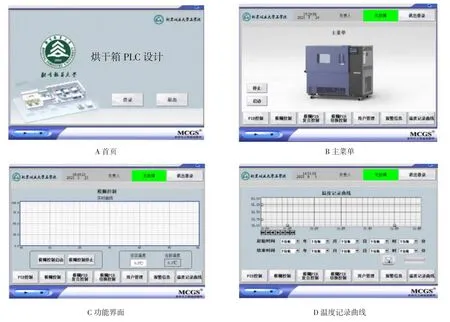
圖12 觸摸屏界面Fig.12 Interface of touch screen
3 結果與分析
烘干箱溫度控制系統的試驗,不但能體現其工程價值,還能對烘干箱進行溫度調控的實際操作,進一步驗證該程序的正確性。本研究選取調整時間、超調量與穩態誤差作為評價指標。
3.1 PID 控制算法分析
使溫烘干溫度從30 ℃升溫至72 ℃,在觸摸屏上觀察溫度變化曲線,PID 控制算法得到的溫度變化曲線如圖13 所示。通過試驗曲線可以看出,其超調量為3.3%,調節時間為480 s,穩態誤差為-0.9~0.6 ℃。
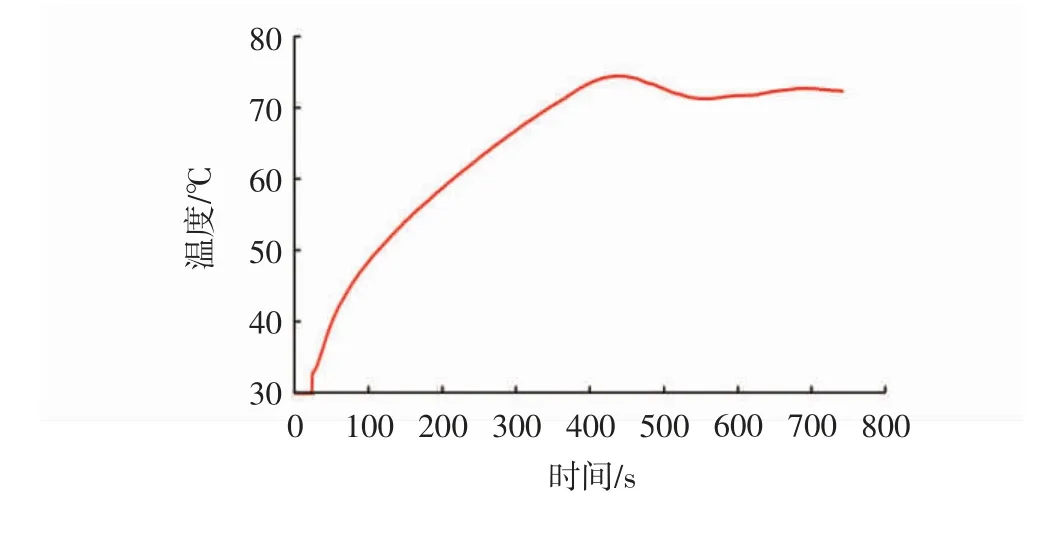
圖13 PID 控制曲線Fig.13 Curve of PID control
3.2 模糊控制算法分析
使烘干箱溫度從30 ℃升溫至72 ℃,在觸摸屏上觀察溫度變化曲線。模糊控制算法得到的溫度變化曲線見圖14。通過試驗曲線可以看出,其穩態誤差為-1.46~-0.9 ℃,調整時間為329 s,無超調量。

圖14 模糊控制曲線Fig.14 Curve of fuzzy control
3.3 模糊PID 復合控制算法分析
使烘干箱溫度從30 ℃升溫至72 ℃,在觸摸屏上觀察溫度變化曲線。模糊PID 復合控制算法得到的溫度變化曲線如圖15 所示。通過試驗曲線可以看出,其超調整時間為314 s,穩態誤差±0.4 ℃,無超調量。
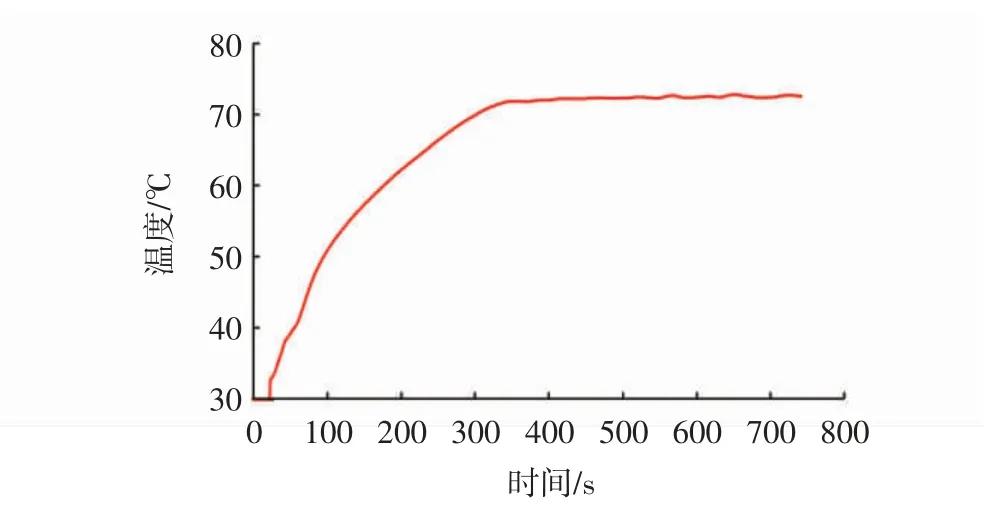
圖15 模糊PID 復合控制曲線Fig.15 Curve of fuzzy PID compound control
3.4 模糊PID 切換控制算法分析
使烘干箱溫度從30 ℃升溫至72 ℃,在觸摸屏上觀察溫度變化曲線。模糊PID 切換控制算法得到的溫度變化曲線如圖16 所示。通過試驗曲線可以看出,其調整時間為320 s,穩態誤差±0.5 ℃,無超調量。
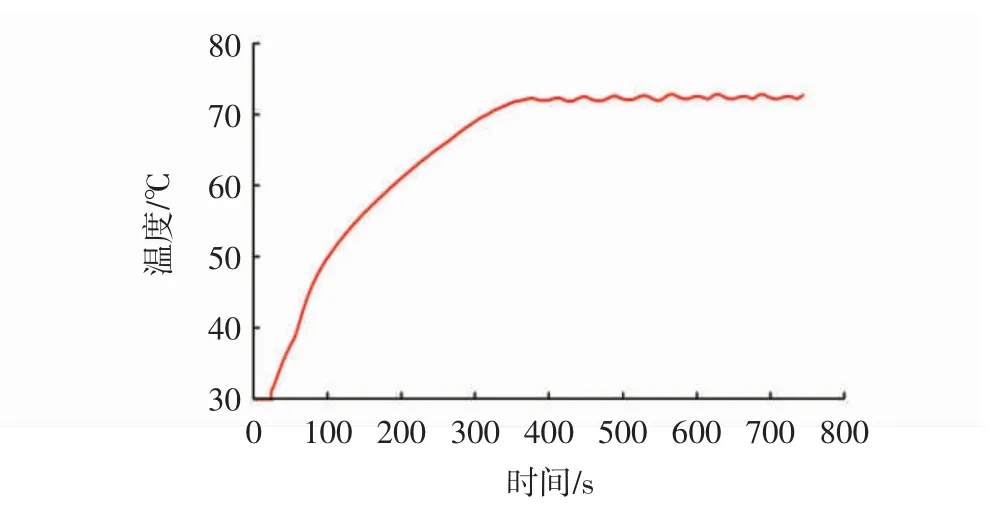
圖16 模糊PID 切換控制曲線Fig.16 Curve of fuzzy PID switching control
4 結論
為更加清晰地對比控制算法對溫度控制系統控制精度的影響,將4 條曲線呈現于圖17 中。

圖17 烘干箱控制算法Fig.17 Control algorithms of drying box
由以上試驗結果可知:調節烘干箱溫度使溫度達到設定值允許的穩態誤差范圍內所需時間長短為:PID 控制>模糊控制>模糊PID 切換控制>模糊PID 復合控制;除PID 控制有超調量外,其余算法均無超調量;穩態誤差大小依次為:模糊控制>PID 控制>模糊PID 切換控制>模糊PID 復合控制。當溫度由30 ℃上升至設定溫度72 ℃時,與模糊PID 切換控制算法相比,模糊PID 復合控制算法調節時間縮短6 s,穩態誤差減小0.1 ℃。因此,兩種結構形式的模糊PID 控制算法即模糊PID 復合控制和模糊PID 切換控制在動態以及穩態特性上均優于傳統的PID 控制和模糊控制。其中,模糊PID 復合控制算法在控制效果上均優于其他控制算法。