基于連續體結構的軟機器人驅動系統設計
2022-06-27 06:45:00金淼金敏敏羅婷婷劉光麗楊潤懷
中國醫療設備 2022年6期
金淼,金敏敏,羅婷婷,劉光麗,楊潤懷
安徽醫科大學 生物醫學工程學院,安徽 合肥 230032
引言
隨著手術器械的變革,為了提高微創手術的創傷性、精準性、穩定性,制造出更小、更加靈活的手術器械[1-2],經自然腔道內鏡手術(Natural Orifice Transluminal Endoscopic Surgery,NOTES) 的 概 念 也 隨 之 產 生[3]。NOTES為不需要經過皮膚切口對患者進行治療的全新的外科手術方法,其通過自然腔道(例如口腔、陰道和尿道等)將柔性內鏡置入體內達到對疾病進行診療的目的[4];利用光纖將激光能量從激光源轉移到目標位置有望實現體內狹窄空間的光熱治療或光動力治療[5]。激光輔助手術已經在醫療領域廣泛使用[6],但目前先進的外科激光系統并不適用于彎曲、復雜、狹窄空間環境下的內鏡手術中[5],而連續體機器人可以到達人體的迂回區域,進行精確的手術[7]。另一方面手動操作柔性光纖是較為困難的,這就促使了光纖與外科手術操作手相結合[8]。
連續體機器人是目前主流的外科手術操作手,但是,目前廣泛應用的軟體機器人多是基于氣動或者液壓驅動的機器人[9-11]。這些機器人可以提供較大的驅動力,普遍的特點是驅動設備較為龐大,而且不能擺脫繁瑣笨重的有線驅動裝置,這就限制了這些機器人在醫療中的實際應用,所以擺脫龐大的驅動系統是必要的[12-17]。為了滿足復雜約束的狹窄空間內的手術需求,擺脫復雜的驅動系統,本文設計了一款尺寸小巧、結構簡單、基于線控的連續體結構、可以用于NOTES的軟機器人驅動系統。系統的設計包括驅動模塊、激光模塊、內窺鏡和觸覺反饋設備幾部分,為縮小尺寸,驅動模塊和激光模塊均內置于直徑為7 mm的線控連續體機械臂中。
1 系統組成
本文提出的軟機器人系統包括驅動模塊、激光模塊、內窺鏡和觸覺反饋設備,見圖1。驅動模塊是由基于線控連續體結構的機械臂和電滑軌組成的機械臂系統,電滑軌驅動機械臂的整體運動,連續體結構負責驅動控制內置于機械臂中的光纖。激光模塊是由激光器和激光光纖組成,激光器作為光纖的激光源,光纖負責將激光傳輸到人體中的目標位置。內窺鏡是由可以傳輸圖像的光纖、相機以及可以處理圖像信息的主機設備組成。內窺鏡負責監控激光在體內的行為,實時地將手術畫面傳輸給操作者。Geomagic Touch操作手是一款具有觸覺反饋的設備,操作手的集成使得機器人系統擁有真實的觸覺感知。

圖1 系統硬件組成圖
操作者通過握持并移動操作手手柄向操作手傳達運動指令,主機將指令解析完成傳輸給機械臂,從而控制機械臂的運動。機械臂系統的運動將帶有激光能量的光纖運送到目標位置并在該位置發揮作用。在此過程中,內窺鏡始終監控激光的行為,將拍攝到的手術畫面傳輸到主機設備上顯示,設備將從手術畫面中讀取觸覺信息,并且與操作手通訊將觸覺反饋給操作者。Geomagic Touch操作手的二次開發和圖像處理部分是將視覺轉化為觸覺反饋的內容,該內容是另一個獨立的、完整的工作體系,見圖2。
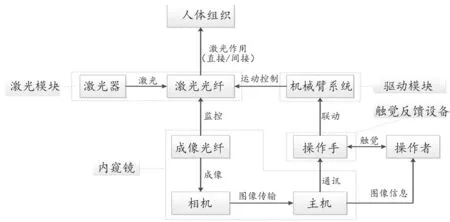
圖2 系統工作流程圖
2 驅動模塊設計
2.1 連續體結構設計
驅動模塊是基于線控的連續體結構[18-22],線控連續體結構相比于液壓氣壓驅動的連續體結構,可以擺脫復雜的液壓和氣壓控制系統使結構更加緊湊[23]。線控結構更加精確,具有更高的負載能力和可控性[24]。本文中連續體結構利用的是繩索的柔性和中空套管的彈性,兩者的拮抗作用固定結構的位姿,其由帶孔的圓盤、牽引絲和中空套管組成,見圖3。
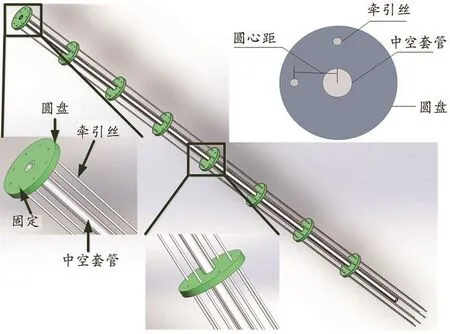
圖3 連續體結構模型圖
中空套管為結構的主干,套管在長度方向上分布著八個圓盤,圓盤在套管上的位置固定。前四個圓盤由兩對長牽引絲控制,后四個圓盤由兩對短牽引絲控制。每對牽引絲對應一對電機,每對電機對應一個自由度,電機在驅動時會向著相反方向運動。類似于等臂杠桿兩端的運動,兩個電機運動的位移相同,但是方向相反。
連續體結構的一些參數影響著結構的變形能力。對于NOTES來說,要求機械臂的尺寸越小越好,而機械臂的整體尺寸由圓盤控制,圓盤的直徑需要盡可能地縮小。但是,圓盤的空間會影響到中間的套管和邊緣的牽引絲的距離,這個距離通過仿真發現會影響機械臂的形變量。所以在機械臂的設計上,要在盡可能小的尺寸下達到較大的工作空間。考慮到多種結構參數的影響,需要多組數據,驗證需要大量時間和材料,所以對該結構進行了有限元分析,圖4是不同直徑的牽引絲和不同直徑圓盤在相同牽引條件下圓心距對變形量的影響,可以看出:① 變形量與圓盤直徑沒有直接相關;牽引絲的直徑和圓心距是影響變形量的參數。在保證了大變形量下的牽引絲直徑和圓心距,最小的圓盤直徑6 mm;② 牽引絲的直徑也影響著變形量,對比0.2 mm和0.5 mm的牽引絲,0.2 mm牽引絲在相同的條件下整體的變形量大于0.5 mm的牽引絲;另一方面牽引絲直徑越小,越利于結構小型化;③ 是圓心距與變形量的關系,相同條件下圓心距越大,變形量越大。但是仿真的最優參數在實際應用中會存在一定的偏差,圓心距不能無限大,在對連續體尺寸、變形量以及制造難度的權衡之下,最終制作圓盤過程中使用的參數分別是:圓盤直徑7 mm,牽引絲直徑0.5 mm,圓心距2.7 mm。這個尺寸下的連續體結構可以降低制作和加工的難度,同時也不損失變形量。

圖4 連續體結構各參數與變形量的關系
2.2 機械臂的驅動控制
機械臂的驅動分為內部驅動和外部驅動,內部驅動電機調控連續體結構的構型。機械臂固定在外部用于驅動的電滑軌上,控制機械臂的整體運動。圖5a展示機械臂系統各部分的組成,基于連續體結構的機械臂的構型如圖5b和5c所示。
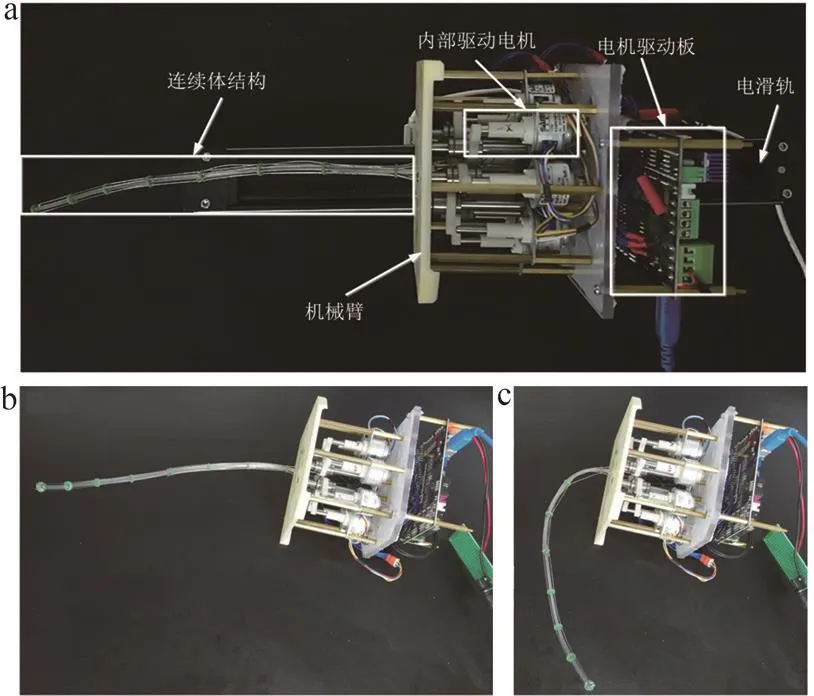
圖5 機械臂系統圖
機械臂的控制采用電機進行,選擇Arduino Mega2560作為開源主板,適合于管腳較多的DIY項目中,采用ramps接口板作為擴展板,提供了電機驅動,可滿足機械臂多自由度的電機控制。Mega2560 和 ramps單板相接,有電機驅動且整體高度較高,對結構設計有要求。MKS GEN主板相當于把Mega2560和ramps單板整合在一起,但價格比較高。MKS GEN_L主板相對于MKS GEN降低了成本,整體布局優化,尺寸也更小。綜合考慮,選擇MKS GEN_L主板作為機械臂的控制芯片。燒錄marlin固件,發送G代碼指令即可控制電機的轉動。
3 系統集成
3.1 光纖的選型
完成了驅動模塊的設計,解決了系統主要的硬件部分。其他部分都與機械臂相關聯,激光模塊和內窺鏡集成在機械臂中。系統采用紅外激光作為激光源,紅外光源能量較高,對人體來說也是一種較為安全的光源。激光光纖一端與激光器連接,一端從中空套管中伸出將紅外激光能量傳輸到人體內,直接或間接作用于人體組織上。成像光纖一端與相機相連,另一端與套管口齊平,無須伸出套管外。成像光纖不直接暴露在人體組織中,防止光纖端面受到污染視野不清。
本研究使用的激光光纖外徑為0.5 mm,成像光纖外徑為0.7 mm。兩者集成在內徑為2 mm、外徑為3 mm的中空套管中,套管使用的是具有一定彈性且不易發生塑性形變的尼龍6材質。在實際手術操作中對內窺鏡的分辨率有要求,要求視野越大越好,但在內窺鏡較小的尺寸下,過高的視場角將導致較大的畸變,所以在選取內窺鏡時需要平衡視野與鏡頭畸變。考慮以上因素,本系統選取的成像光纖顯示分辨率為32000像素,視場角為50°,景深>5 mm。激光光纖和成像光纖在套管中需要有一定的約束,將光纖在套管中的位置固定,避免光纖在套管中位置不固定導致的視野不穩定。在套管中增加帶有相應孔隙的小圓片,圓片固定在套管口,將光纖分別穿入對應的孔隙,可以使兩個光纖固定。
3.2 觸覺反饋設備的選型
觸覺反饋設備的選型需要考慮機械臂系統的自由度和力反饋的維度。為了完成與連續體機器人的聯動,需要考慮二次開發的難度,選擇具有配備齊全的開源工具包的硬件設備,降低開發難度。選取了Geomagic Touch(原Sensable PhantomOmni)操作手,它是業界最廣泛配置的專業力反饋裝置。該設備具有六個自由度的位置感知和三個自由度的力反饋,并提供OpenHaptics工具包,可編寫基于力反饋觸覺設備的應用程序,達到二次開發的目的。使用C++作為主要編程語言,可調用所需API編寫基于力反饋觸覺設備的應用程序,進行二次開發。
4 結果
4.1 機器人的工作空間
通過驅動圖5中的內部驅動電機測試出連續體結構各個方向最大的彎曲角度,可以測得連續體結構具有較大的變形能力,彎曲角度約90°。根據彎曲角度結合機器人的尺寸在matlab中簡化相應的連續體結構模型,繪制出連續體結構的工作空間。由于內部驅動電機和連續體結構都為軸對稱結構,所以通過圖6中繪制出的機器人的工作空間中心截面圖可以反映出機器人的工作空間。
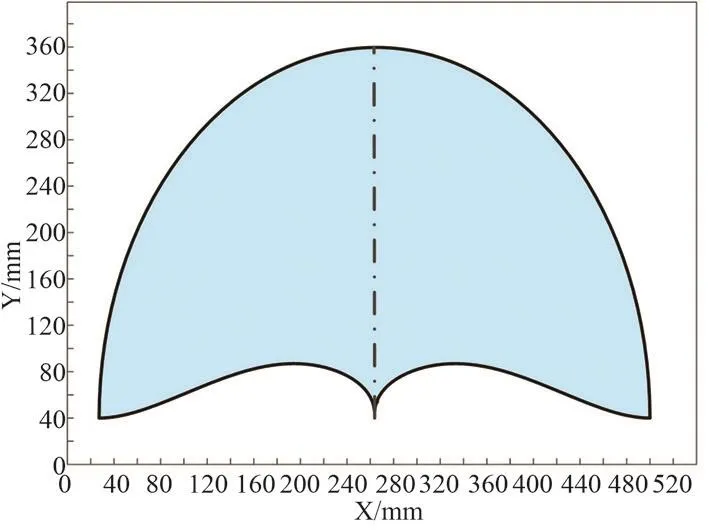
圖6 機器人工作空間中心截面圖
4.2 機器人的運動路徑
針對本研究中所提出的連續體驅動系統,為了驗證系統是否可以按照所規劃的路徑進行運動,對系統進行了測試。根據內部驅動電機的特性預設出正方形、長方形、平行四邊形、“V”形四種路徑,觀察系統是否能按照預設的路徑完成運動。圖7中紅色虛線部分代表預設的路徑,藍色實線表示實際運動路徑,由圖7可以看出系統基本可以完成所規劃的封閉路徑和不封閉的路徑。
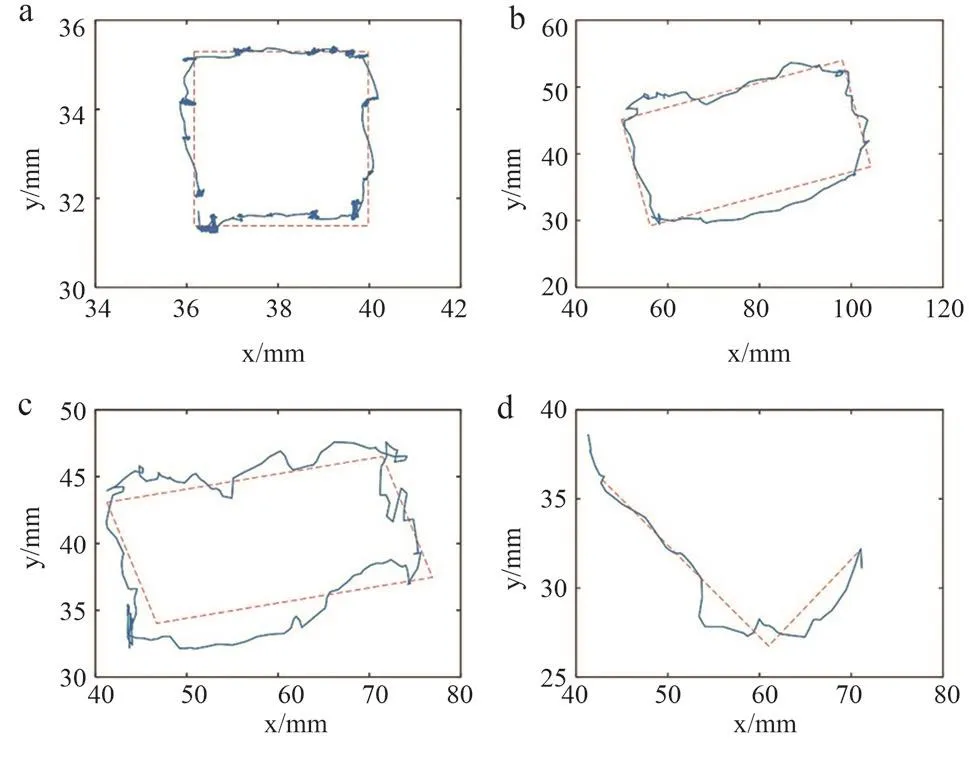
圖7 機器人運動路徑圖
5 討論
利用手術器械直接到達病灶處診斷和治療是非常必要的[25],但是因為手術器械本身的設計結構就較為復雜,功能也常常局限于復雜的機械結構和較大的規模,導致疾病很難采用直接檢測的方法來進行診斷和治療。由于復雜和受限非結構化環境的手術需求,小型的連續體機器人優勢更加明顯。傳統的肌腱機器人往往難以達到毫米或者亞毫米級別[22,26]。例如依靠肌腱拉動牽引多根肌腱線和一根中央骨干線驅動的連續型機器人,為了避免接頭和滑輪的出現,這些機器人的制造更加偏向于在執行器中嵌入柔性元件以豐富執行器的功能,提高自由度[27-28]。但是,這種制造過程的復雜性就決定了這類機器人難以做到微型化[29-32]。
本研究設計的這款基于連續體結構的軟機器人驅動系統適用于經自然腔道,深入人體中難以到達的部位進行操作,解決間接檢測的不準確性。在目前研究的基礎上,相較于傳統的肌腱機器人,縮小了連續體結構的尺寸;相較于基于氣動或者液壓驅動的機器人,簡化了連續體結構所需的驅動裝置。驅動系統高度集成了光纖,后續還可以與各種微型的手術縫合針、手術鉗等結合,解決更全面的手術問題。
但是本研究在連續體結構的設計上還有待進一步的優化,需要解決連續體結構運動時存在的抖動問題,考慮可能是牽引絲的牽引力不穩定導致。所以之后需要進一步的解決牽引絲對連續體結構的空間位置和姿態的影響以及連續體結構的動力學問題。
6 結論
本文主要是針對人體內難以到達的彎曲、復雜、狹窄的空間設計了一款小型連續體軟機器人驅動系統,采用了一款具有中空套管的線控連續體結構,套管為結構中必不可少的一部分,既是連續體結構的主干,同時為系統集成預留了空間,因此對實現系統結構的緊湊性做出了重大貢獻。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
哲學評論(2021年2期)2021-08-22 01:53:34
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
當代工人(2020年8期)2020-05-25 09:07:38
中華詩詞(2019年7期)2019-11-25 01:43:04
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
家庭影院技術(2017年9期)2017-09-26 03:41:45
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
科技知識動漫(2016年8期)2016-07-29 20:40:09