三維激光掃描技術在建筑物立面測繪中的應用
2022-06-27 08:56:24萬建鵬葉素倩
江西科學 2022年3期
萬建鵬,葉素倩,陳 敏
(1. 廣東省核工業地質局測繪院,510800,廣州;2. 廣州開發區土地開發儲備交易中心,510700,廣州)
0 引言
建筑立面圖[1-2]是建筑物在與其立面平行的投影面上所得的正投影圖,精確繪制的立面圖可以清晰地反映建筑物的外部特征,是城市市容規劃改造、古建筑外部裝修重建等工程中施工設計的關鍵依據。傳統測量方法[3-4]一般通過全站儀極坐標單點測量的方式,對建筑物各個立面的特征點進行數據采集,局部區域還需借助皮尺、測距儀等工具進行人工測量,存在耗時長、費用高、效率低、精度無法保證等缺點,給立面測繪增加了很大難度。無人機航測[5]雖然能快速獲取建筑物三維信息,但在數據采集、數據處理、數據精度上都存在相關問題,且精度難以保證。三維激光掃描技術是通過激光掃描獲取大面積點云數據的測繪技術,又稱為高清晰測量技術,經過近年技術的高速發展,在變形監測[6]、建筑工程[7]、文物保護[8]等領域的應用越發廣泛。三維激光掃描儀通過激光脈沖發射高密度、帶有反射率信息的海量點云,在不接觸被測目標情況下,實現了三維點云數據的快速采集,在內業處理中通過軟件可在點云中快速提取目標的線、面、體等空間結構信息,重構出實體目標的真彩色的三維模型。基于三維點云數據的建筑物信息提取方法克服了傳統立面測繪方式的缺點,能在復雜空間中對各類規則與不規則的建筑實體進行快速作業,具有時間短、數字化、精度高、智能化等的突出優點,更快、更便捷地獲取建筑物立面的制圖數據,為城市規劃、建筑物保護等后續實施工作提供基礎測量數據。
1 三維激光掃描技術
1.1 工作原理
目前市場上三維激光掃描儀的產品種類較多,在工程應用中各具特點,本文基于FARO Focus儀器展開研究。FARO Focus系列三維激光掃描儀是美國FARO公司近年來研發的新型儀器,其測量原理是通過激光束發射傳遞到鏡頭中央,通過鏡頭的高速旋轉將激光發散到目標物體,接觸物體后及時將激光位移數據反饋回掃描儀,得出激光和物體之間的距離,再利用調制技術和角度編碼器測量鏡頭和掃描儀兩者旋轉的角度,獲得各激光點的三維坐標。Focus系列掃描儀的主要技術參數如表1所示。
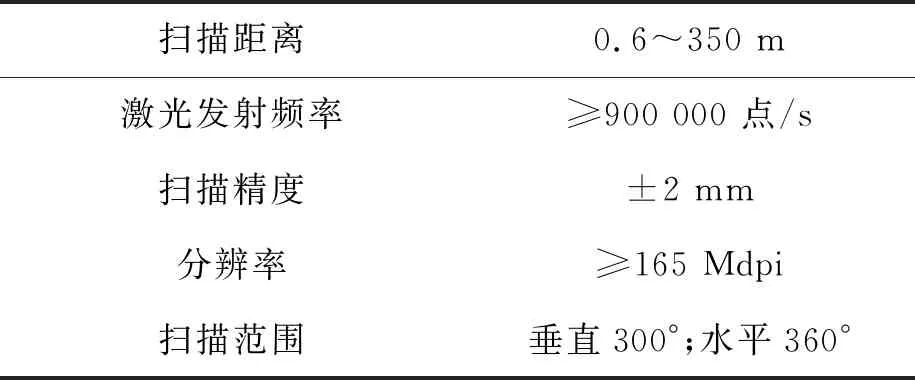
表1 Focus系列掃描儀的技術參數
1.2 技術路線
采用FARO三維激光掃描儀進行建筑物立面測繪技術路線如圖1所示,其主要分為測量前資料的收集與技術方案編寫、外業數據采集、內業點云數據處理、立面圖繪制以及精度評定等。
1.3 三維數據采集
作業前應對設備進行檢驗,儀器部件是否齊全,運轉是否正常,電池容量、內存容量是否充足,當環境條件較為惡劣時,要提前對儀器進行預熱,避免逆光拍攝。作業時,掃描應均勻布設,設置在視野開闊、穩定的安全區域,合理的測站可減少數據的冗余,利于后期數據處理,開始作業時要根據站點到目標的距離,精度要求設置好掃描儀的掃
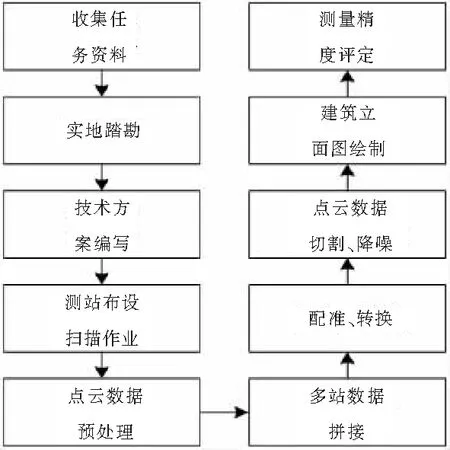
圖1 技術流程圖
描范圍、采集分辨率才開始掃描,每站間的點云重疊率≥20%,區域分塊掃描時,相鄰點云數據的重疊度≥10%。標靶布設是確保多站數據完整拼接的基礎,在每站掃描儀的有效視場內標靶布設要合理,避免盲區的建立,盲區會加大后期建模難度,其精度也會下降,要減少重復掃描區域,重復區域過多,既增加掃描工作量,又增加后期點云處理以及建模的工作量。
1.4 數據處理
數據處理主要包括點云拼接、坐標轉換、降噪抽稀、數據裁剪等工作。
1.4.1 點云拼接 由于測區范圍過大,只在一個測站無法獲取研究對象全部點云數據,需要將不同測站的點云數據進行拼接,每站采用3個同名點進行點云拼接,一般以作業時布設的靶球為同名點。
1.4.2 坐標轉換 通過測得的標靶的三維坐標值,采用七參數法將FARO三維激光掃描儀掃描得到的點云網格中的三維數據轉換為實際控制測量系統的三維坐標。
1.4.3 降噪抽稀 作業時由于存在環境因素的干擾,使獲取的點云數據中存在異常,可采用軟件自帶的濾波算法或人眼識別手動進行點云數據降噪處理;點云數據冗余既增加了軟件展現負擔,又對目標特征的提取沒有太大幫助,可對點云數據進行抽稀處理,但應以滿足制圖要求為原則,根據局部特征可采取均勻抽稀或保留特征進行抽稀。
1.4.4 數據裁剪 在軟件中可將目標范圍內點云數據識別出來,確定邊界范圍后,運用軟件裁剪功能將點云數據進行裁剪,或根據對建筑物不同立面測繪的需求,運用軟件的分割功能,將點云進行分割,得到可制圖的點云數據。
1.5 成果輸出
得到可以進行制圖的點云數據后,一般可將點云數據運用相關插件直接插入到AutoCAD中,運用其強大的繪圖功能,根據GB/T 50104—2010[9]建筑制圖標準相關要求,對建筑立面圖的繪制進行立面圖形的繪制。根據項目要求,對建筑物的外部特征進行重點或側重點描繪,繪出整體輪廓。再對成果進行精度評定。
2 工程實例
本文以廣東某地古村落建筑的保護項目為例,該村屬于民間文化遺產重點搶救對象,經過現場探勘和研究,建筑的年代較為久遠,墻體結構較為脆弱,采用常規測量該項目無法達到業主方的時間和精度需求,故采用三維激光掃描技術進行立面測量。目標建筑的現狀如圖2所示。

圖2 目標建筑的局部圖
2.1 數據采集與數據處理
在現場踏勘得出,本次項目的古建筑群邊臨灌溉渠,只能在渠道對岸利用三維激光掃描儀進行數據采集,但采集范圍不大,主要進行繪制街道一側建筑群的立面圖。項目采用 FARO350地面站式三維激光掃描儀,掃描點云間隔為2 mm,站點間距控制在5~10 m,建筑物間外部細節較為相似,兩站之間保持30%以上的重疊度,使每個站點都能掃描到現場設定的靶球。由于掃描儀掃描距離較遠,根據現場地勢特征,前半部分在對岸高樓通視處布設多個掃描站,后半部分在對岸的地面合適處布設掃描站點。數據采集完畢后,將內存卡中數據導入到FARO配套軟件SCENE中,部分站點的測站點云如圖3所示。
在SCENE中進行多站點云數據的拼接,軟件可自動識別靶球位置進行點云拼接,識別出錯也可手動標定靶球位置進行點云拼接。根據建筑物周邊的測量控制點,采用全站儀測定起始站或中
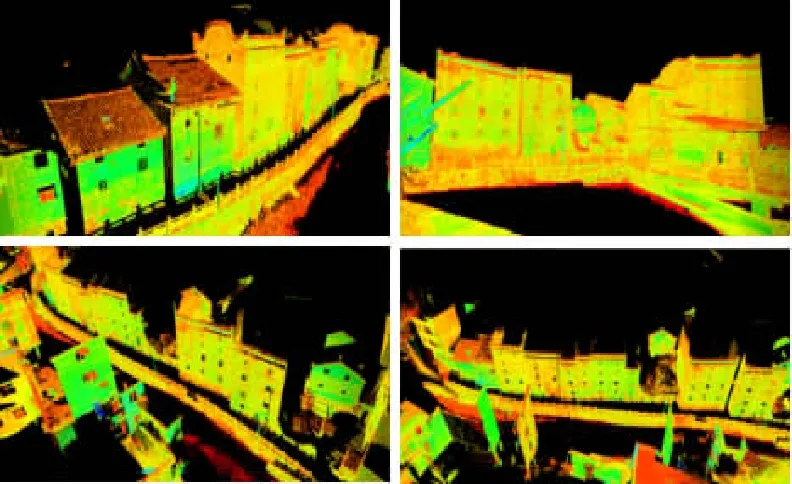
圖3 部分站點的測站點云
間3個同名靶球的坐標,經過坐標轉換后將控制測量坐標系引入到三維點云中,從而將多站點云數據整合配準到同一個坐標系中,方便在軟件中實現點云數據的自動精確配準, 配準過程中控制站間誤差在2 mm以內,滿足立面線畫圖的要求。經過處理得到拼接后的建筑物群實景點云數據,如圖4所示。
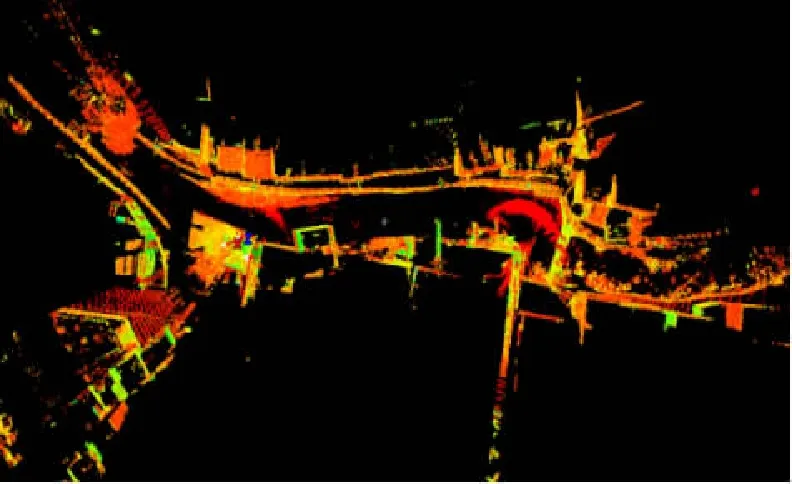
圖4 測站點云拼接成果俯視圖
配準拼接后得到的點云成果還需要進一步處理,根據工程的精度要求,對拼接的原始點云進行抽稀,減輕存儲和數據處理的壓力,再對點云數據進行優化,去噪可在SCENE軟件中使用其自帶的數據平滑功能進行降噪,或結合肉眼識別,使用軟件中的框選工具等方法手動剔除非目標信息,再對整體的數據進行裁剪,得到目標區域的完整點云數據,如圖5所示。
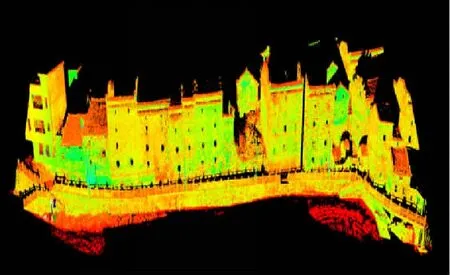
圖5 目標區域的點云數據
2.2 立面圖繪制
立面圖能具體體現出建筑物基本形狀和特征的輪廓構成。將三維點云進行處理完成后,將特征點云數據導出至AutoCAD中,結合正射影像圖、點云數據的建筑物輪廓線、特征點、線、面等繪制建筑物的立面線畫圖,實際繪制時,參考實地踏勘拍攝的特征照片進行驗證校對,以確保建筑物立面信息的正確性,繪制的建筑立面細節如圖6所示。
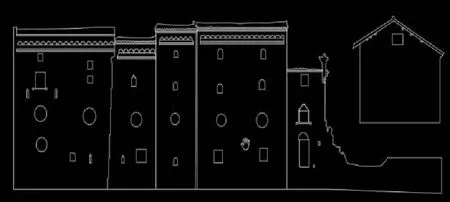
圖6 建筑物立面細節
3 測量精度分析
FARO FUCUS系列三維激光掃描儀測距、測角的標稱精度較高,但在實際掃描作業過程中,受到環境影響,其測量精度會受不同程度的影響,為驗證本次數據采集的精度,選取多站中的9個靶球位置作為校驗點,其中靶球位置坐標用全站儀測出,高程用GPS的RTK測量模式測取,將實測的三維坐標(x,y,H)與點云數據中各站標靶位置進行對比,各個檢測點平面與高程誤差統計表如表2所示。
根據各項的誤差△e,用公式(1)可得到平面中誤差與高程中誤差。
(1)
可得σx=0.025 m,σy=0.026 m,σH=0.019 m,σs=0.037 m,結果滿足《GB 50026―2016工程

表2 平面誤差與高程誤差統計表/m
測量規范》中對建筑立面圖平面和高程中誤差的限差要求,表明本次三維激光掃描數據采集的成果其精度滿足要求。在AutoCAD中進行建筑物立面圖測繪,其基礎就是符合精度要求的點云數據,當外業采集的點云數據符合精度要求后,為更好地驗證立面尺寸信息的準確性,可通過提取立面圖中特征線的長度與實地激光測量的長度進行對比,來驗證繪制的立面圖的誤差大小是否滿足精度要求。統計結果如表3所示。
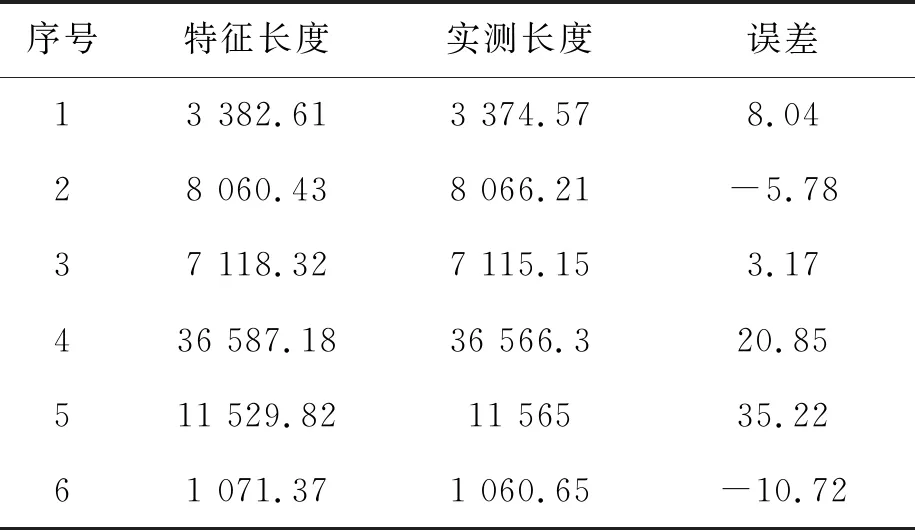
表3 立面圖特征相對誤差統計表/mm
由誤差統計可知,其均誤差為8.46,即其邊長間距精度為 8.46 mm,按照國標規范要求,非常滿足古建筑物保護立面測繪要求的,同時由誤差統計表明,誤差不隨邊長尺寸的積累而疊加,因為立面線畫圖精度是以點云數據為基礎的,不同區域點云質量會影響立面圖的精度。
4 技術總結
本文探討FARO三維激光掃描技術在建筑物立面測繪中的應用,闡述了外業作業流程以及內業數據處理步驟,通過廣東省某古建筑保護工程的實踐為例,對三維激光掃描在建筑物立面測量中的應用展開了實例說明,對外業數據采集和內業數據處理方法進行了總結,對測量成果的精度進行了驗證,表明三維激光掃描儀在建筑物立面測繪中能發揮高效率、高精度、更智能、更便捷的特點,很好地滿足項目的需求。通過項目的具體實踐,進一步掌握了三維激光掃描技術在建筑工程行業中的應用,為工程上相關從業者提供參考范例,同時為將FARO三維激光掃描儀拓展到相關工程領域內的應用打下堅實基礎。對類似項目有借鑒意義。
猜你喜歡
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
江西建材(2018年4期)2018-04-10 12:37:38
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21