改進EEMD 與ICA 算法的水電機組振動信號特征提取
2022-06-28 13:03:46張新華楊峰雄付向濤
水電站機電技術 2022年6期
張新華,鐘 永,袁 翔,楊峰雄,付向濤
(1. 國家電力投資集團水電產業創新中心,湖南 長沙 410000;2. 五凌電力有限公司掛治電廠,貴州 錦屏 556700)
隨著國家構建新型電力系統戰略的提出,促進了水電行業進一步發展,水電機組的單機容量越來越大,水電機組安全穩定運行也越來越受重視。然而,水電機組振動受水力、電磁、機械、環境等各個方面因素影響,運行工況極其復雜。采集的振動信號受環境噪聲、故障信息等因素相互疊加的影響,使得水電機組振動信號早期包含的故障特征易被環境噪聲所湮沒,這些因素都制約水電機組振動信號特征提取。目前,水電機組振動信號特征提取方法主要包含:頻率分析法、小波包特征提取方法、經驗模態分解(EMD)分析方法[1]。頻率分析方法對于平穩信號的分析有較好的效果,對于水電機組振動這種非平穩信號分析效果不佳;小波包分析方法具有時頻兩相性特征,但本質上仍是一種線性變換,且小波基的選取和分解層數具有不確定性,無法自適應地進行信號特征提取;EMD 是一種自適應信號分析方法,但EMD 分解受端點效應的影響,信號處理過程存在失真現象。以上方法在特定情況下,對于信號特征提取有很好效果,但不具備對復雜非平穩信號的特征提取[2]。
文中提出一種基于改進 EEMD 與獨立成分分析(ICA)的水輪機振動信號特征提取方法。首先針對EEMD 算法存在的端點效應問題;提出一種基于鏡像延拓的改進EEMD 算法,用改進的EEMD 算法對水輪機振動信號進行處理,得到一系列固有模態函數(Intrinsic Mode Function,imf)分量;其次,對主要imf 分量進行重構并和原始信號一起作為ICA 算法的輸入信號,進行ICA 算法分析處理,對ICA 算法處理的信號進行頻譜分析;最后以ICA 算法處理信號的頻譜作為水輪機振動信號信號特征,用以研究水輪機振動狀態變化規律,以指導機組檢修。
1 改進EEMD 方法
1.1 EEMD 方法
EEMD 方法是在EMD 分解信號基礎上,加入一組均值為零、方差相等的隨機白噪聲序列。EEMD同樣是利用三次樣條插值函數求取信號上、下包絡。但三次樣條插值函數擬合信號包絡線過程中,在信號端點處易發散,在第1 個imf 分量的端點位置產生誤差,原始信號減去第1 個imf 分量的余項是第2 個imf 分量。在篩分的過程中,三次樣條插值擬合的誤差使端點向信號內部擴散,造成虛假的imf分量。尤其是當信號較短時,端點效應會使得EMD和EEMD 的分解結果失去意義,嚴重影響信號分解的質量。對于復雜的、非平穩的信號,需要進行多次EMD、EEMD 分解,端點效應的擴散會從第1 個imf開始,逐漸放大,嚴重干擾信號特征提取,造成分解結果失真[3]。
1.2 端點效應及其常用改進方法
EEMD 在用三次樣條法擬合上下包絡線時,在信號兩端點出現較大的發散,造成失真現象,這就是所謂的端點效應。若端點效應不加以抑制,會使得分解結果失去意義。
目前,針對如何抑制端點效應,提出了許多解決方案。劉忠 等[4]提出極值延拓算法,以信號的極值點為依據,對信號進行延拓,在信號2個端點處,向外延拓2個極大值點和2個極小值點。蔣文君 等[5]提出基于EEMD 的特征提取方法,通過EEMD 自適應的白噪聲抑制原有信號的噪聲,改善EMD 分解結果,從而達到改善EMD 的端點效應的目的;徐力彬 等[6]提出基于鏡像延拓與窗函數相結合的算法,通過窗函數改變信號端點,從而抑制其發散。廣大學者在抑制端點效應效果方面雖然提出了很多解決方案,但這些方案也存在突出的問題,包括:延拓后的端點依然是不確定的,這導致擬合后的包絡線在信號端點處依然是發散的;EEMD 這種改進算法依然采用的三次樣條插值,并沒有算法從本質上解決端點效應問題;此外,窗函數會改變原有信號的特征和窗函數本身缺乏自適應性。
1.3 基于鏡像延拓的改進EEMD 方法
其改進算法的流程圖如圖1 所示。
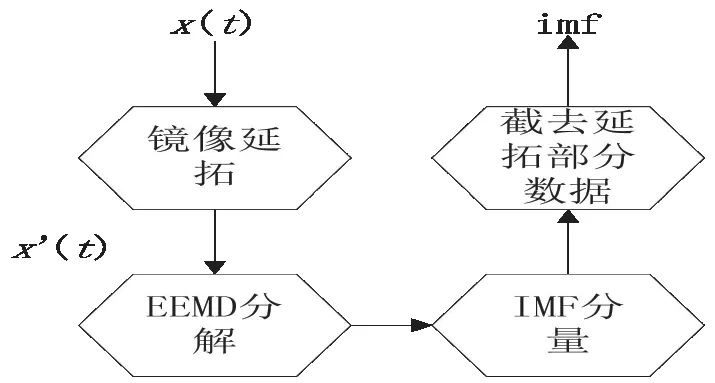
圖1 改進EEMD 算法
首先:(1)對信號x(t)進行鏡像延拓。基本原理是:①找到信號左、右端的第1 個極值點;②利用鏡像延拓,將信號左端點至左端第1 個極值點的信號、右端點至右端第1 個極值點信號對稱延拓,通過延拓使信號的端點向外延伸,增加了可處理數據的長度,從而提高EEMD 的分解精度。(2)將一組均值為零、方差相等的隨機白噪聲序列加入延拓后的信號,得到復合信號x’(t)。(3)采用EMD 算法對復合信號x’(t)進行分解。分解后得到n組imf 分量[imf1,imf2,…,imfn],和m組余量[r1,r2,…,rm]。(4)截斷鏡像延拓部分信號后,作為原始信號x(t)最終的分解結果。根據文獻[7,8],用相關系數ri來表征各imf分量與原始信號的相似度,以此來評價EEMD 的抑制效果,相似度越高,端點效應的抑制效果越好。

1.4 仿真分析
為了檢驗改進EEMD 方法的有效性,對仿真信號進行鏡像延拓后對其進行EEMD 分解,最后再舍去延拓部分。仿真信號x(t)為:x(t)=50 sin(200×pi×t)+20 sin(100×pi×t)+sin(40×pi×t)。x(t)選取1 001 個點。
仿真信號、鏡像延拓信號和EEMD 處理結果如圖2 所示。從圖2 可以看出,各imf 分量端點沒有出現明顯的發散現象,端點效應得到了較好的抑制。
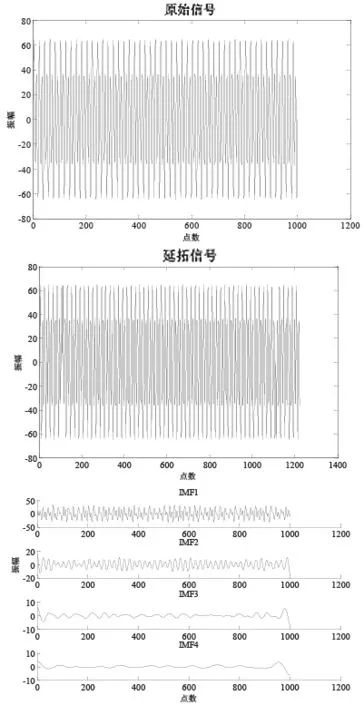
圖2 仿真信號分解結果
為進一步驗證端點效應的抑制效果,用傳統EMD 算法、極值延拓算法對該仿真信號進行分解處理。傳統EMD 算法、極值延拓算法和文中改進算法分解信號后得到的相關系數見表1。
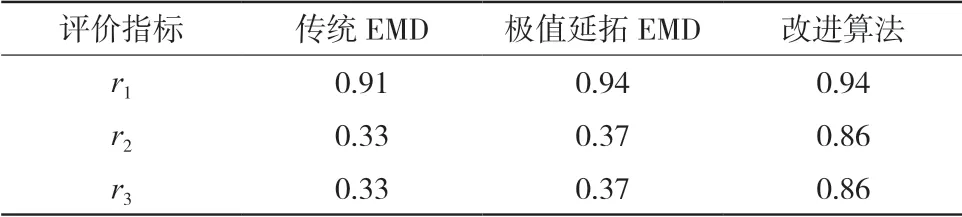
表1 端點信號抑制效果比較
從表1可以看出,傳統EMD 方法處理結果的相關系數最小;極值延拓與算法改進后的得到分解結果,其相關值有不同程度增大;從表中可以發現:隨著分解層數的增加,端點效應逐步發散,其相關系數逐漸降低;根據改進EEMD 方法得到的3 個相關系數均大于0.8,對端點效應抑制效果最為明顯。
2 獨立分量分析
ICA 分析的目的是對任何已知測得的信號x(t),在任何混合矩陣W未知情況下,求出未知信號源s(t),固有矩陣模型為:

在進行ICA 分析之前,先對信號進行白化處理,以改善算法的計算性能。
設C為一個信號x的協方差樣本矩陣,有:

式中將x進行奇異值分解,U、V0為左右奇異矩陣,δ為信號C特征值構成的對角陣,∑0為信號x奇異值組成的對角矩陣。令Z為:

則有:

由式(5)可知,Z為單位正交矩陣,這一過程稱為白化處理[9-11]。
3 水電機組振動信號特征提取
3.1 基于改進EEMD 與ICA 的特征提取方法
針對傳統時頻特征分析方法難以準確分析故障特征,提出基于改進EEMD 與ICA 的特征提取方法。其算法流程如圖3 所示。
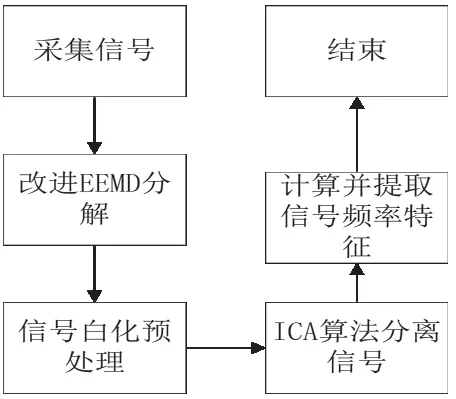
圖3 特征提取流程圖
具體步驟為:①首先采用改進的EEMD 算法對信號進行處理,分解得到imf 分量;②選擇與原信號相關系數較大的imf 重構虛擬通道,與原信號一起輸入ICA 算法。③對ICA 算法計算得到的輸出分量進行FFT 變換,分析其頻譜特征。
3.2 水電機組振動信號的分析
國內某水電機組大修前,發現定子基座振動信號偏大,其水輪機參數:軸流轉槳式機組,導葉24片,設計水頭320 m,額定轉速115.4 r/min。選用豪瑞斯振動傳感器MLS-V9,安裝于定子基座X、Y 方向。采集信號時機組在變負荷工況下運行,截取其中一段數據共4 325 個點進行研究。原始信號如圖4 所示,用改進EEMD 算法分解信號結果如圖5 所示,ICA 算法輸出信號及其頻譜如圖6 所示。
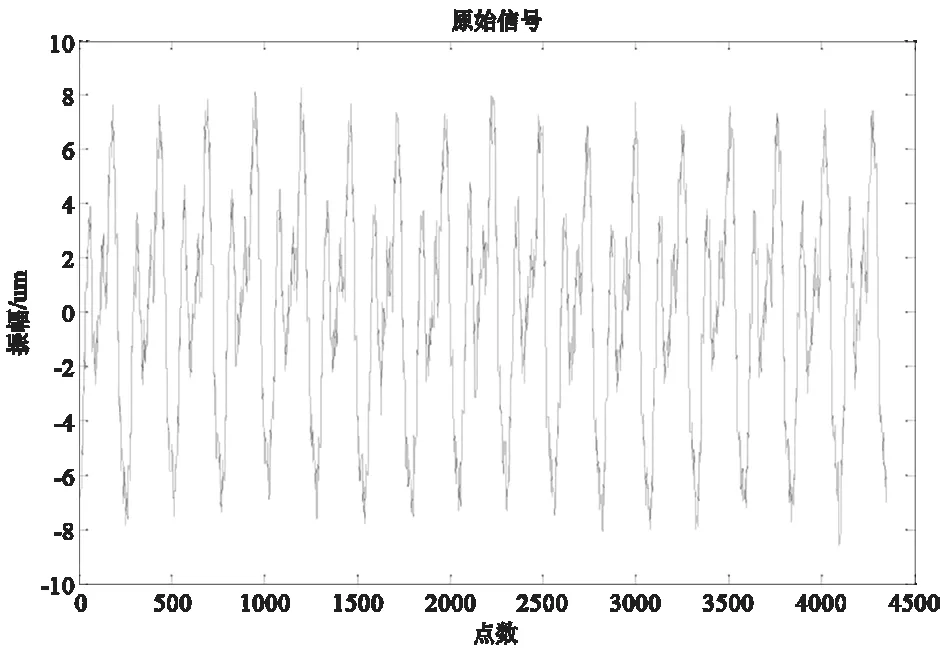
圖4 實測信號
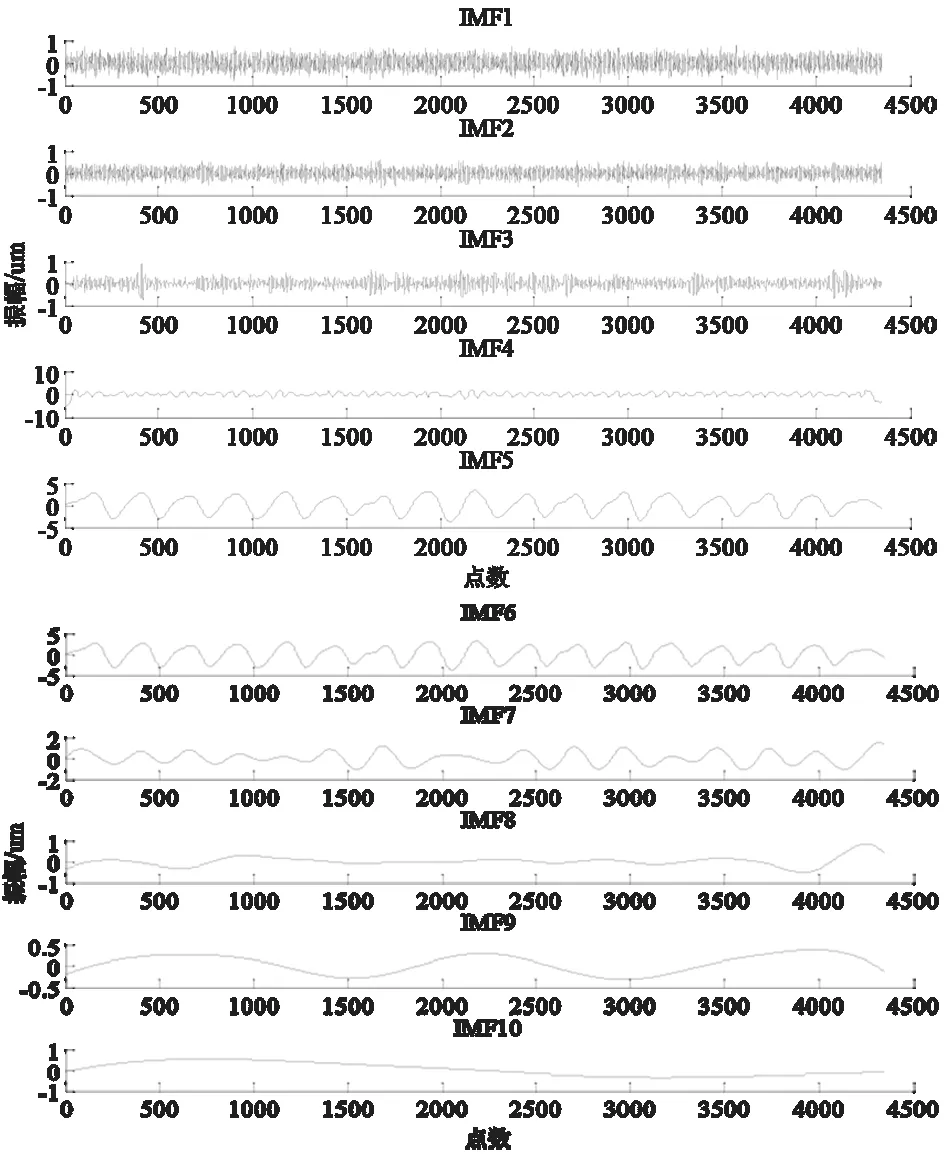
圖5 改進EEMD 分解
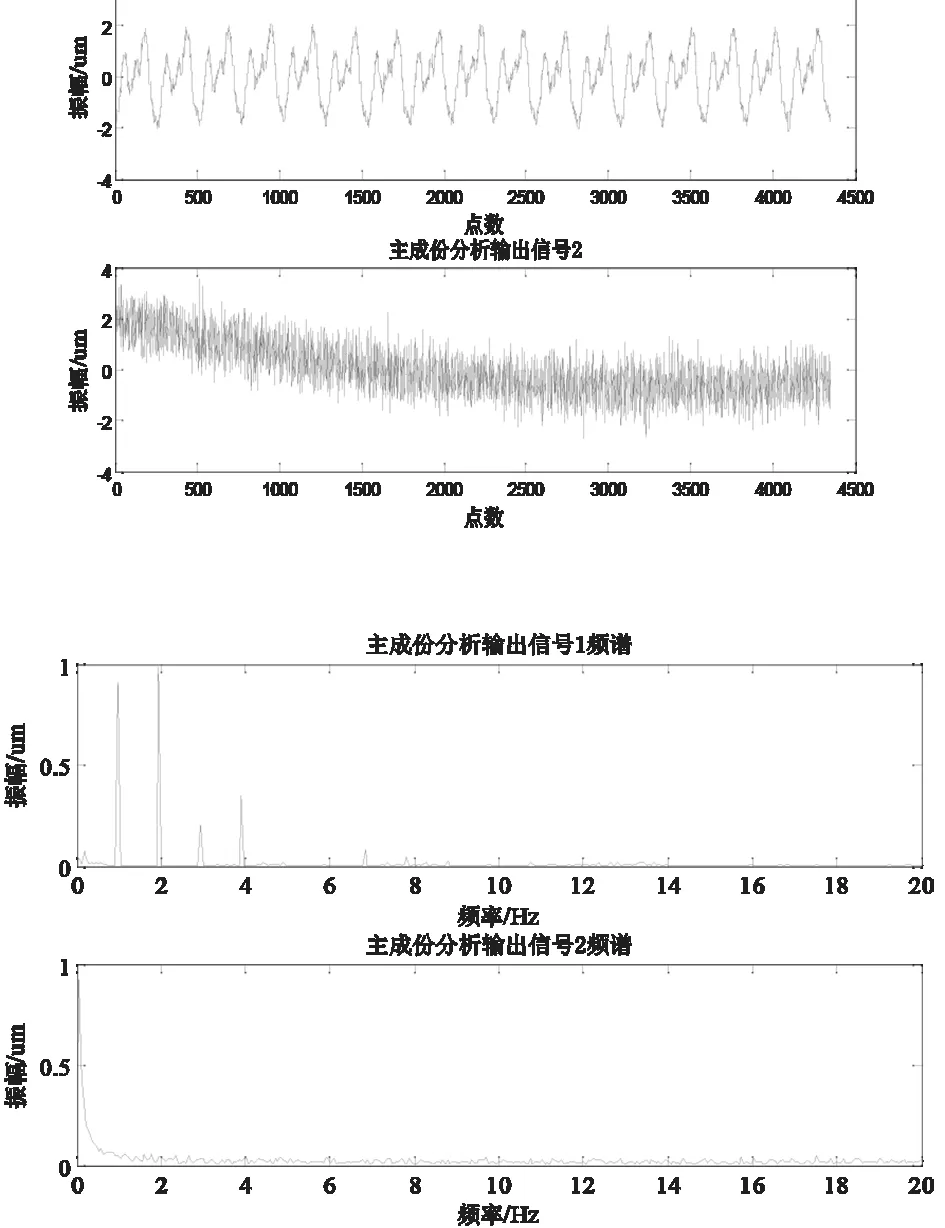
圖6 ICA 算法輸出信號及其頻譜
由圖5 的分解結果可以看到,改進算法分解得到的imf,其兩端并沒有出現明顯的發散現象,表明該算法對端點效應的抑制是有效的。
由圖6 可知,改進EEMD-ICA 算法提純了水輪機組的振動信號,并成功提取了機組的頻率信息。
從圖6 可以明顯看到,機組振動信號頻率中出現了1/2 倍頻以及整數倍頻。由水電機組故障診斷集可知,在機組變負荷過程中,存在轉子動不平衡、質量不平衡以及尾水管渦帶、壓力脈動較大等工況時,頻譜表現為1/2 倍頻和整數倍頻,初步判斷,機組振動主要由尾水管壓力脈動產生。在機組解體過程中發現,壓力脈動作用結果表現在轉輪葉片上形成大面積空蝕,如圖7 所示,實際結果表明所提出的算法可以提取水輪機組微弱故障信號。

圖7 轉輪葉片上形成的空蝕
4 結論
(1)文中提出的基于鏡像延拓的改進EEMD 方法充分結合鏡像延拓和EEMD 算法的優勢,避免傳統EMD 算法分解過程中存在端點效應問題和分解過量的問題。
(2)基于改進EEMD-ICA 算法能夠自適應消除信號的噪聲,將其應用于水輪機組故障特征提取,該方法保留信號的原始特征,避免頻譜分析中噪聲頻率的干擾,用以指導現場檢修。實踐證明所提方法可以很好滿足工程實踐的需求。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
核科學與工程(2021年4期)2022-01-12 06:30:26
今日農業(2020年19期)2020-12-14 14:16:52
天天愛科學(2020年6期)2020-09-10 07:22:44
電子制作(2019年15期)2019-08-27 01:12:00
數學物理學報(2017年6期)2018-01-22 02:26:40
中學物理·高中(2016年12期)2017-04-22 11:53:03
中國生物醫學工程學報(2017年6期)2017-02-10 05:11:45
噪聲與振動控制(2015年4期)2015-01-01 07:08:21
計算物理(2014年2期)2014-03-11 17:01:44
