ABB弧焊機器人系統焊接路徑規劃模擬研究
2022-06-29 06:32:22周龍桂陸云
裝備維修技術 2022年6期
周龍桂 陸云
摘 要:為了改善ABB弧焊機器人焊接質量,本文以焊接路徑規劃作為切入點,建立在工件焊接基礎上,構建路徑規劃模型。該模型的信息來自手動示教方式應用,根據起始點和終點創建向量,并計算焊縫離散點坐標,采取投影、坐標轉化等一系列處理,結合離散編程,形成路徑規劃模型。模擬結果表明,該算法能夠實現角焊接路徑的高效高精準規劃。
關鍵詞:路徑規劃;離散化;機器人
經濟迅速發展時代背景下,自動化制造產業逐漸向工業機器人作業方向轉變,并且在多個工廠推行,成為現階段工業發展不可缺少的工具之一[1]。焊接路徑規劃作為機器人技術的核心,在很大程度上決定了作業質量,如何準確規劃焊接路徑成為了當前重點研究內容[2]。目前,國內已經提出了一些路徑規劃策略,但是大部分未能通過驗證。為了加深對此方面內容的探究,本文選擇比較常見的直線焊縫作為研究對象,探究其軌跡規劃策略。
一、ABB弧焊機器人焊縫離散化處理
按照手動示教方式,獲取與焊縫相關信息。信息中,起始位置記為 ,終止位置記為 。假設機器人作業焊接速度為V0,在對焊縫曲線采取離散化處理時,產生的插補周期記為T。
從焊縫的起始端開始計算,沿著焊縫處理方向,連接起點和終點,形成有向向量,記為 ,該向量的計算公式如下:
三、焊接路徑規劃模擬實驗
1、確定焊縫點位置
本次模擬試驗中,選取角焊接工藝作為機器人焊接方式[3]。其中,焊接對象為兩塊平面鋼板組成的工件。其中,工件焊接起點坐標為 ,工件焊接終點為 。設定插補周期T=5s,機器人的焊接作業速度 。
第一步:對機器人焊縫采取離散化處理,生成焊縫點坐標。其中。
第二步:將焊縫點坐標組成空間直線,根據直線關系,構建離散點輔助坐標系[4]。
第三步:將示教三點帶入輔助坐標系中,采用三點標定方法,得到關系矩陣,即機器人與工件之間的關系,得到如下矩陣:
以機器人基坐標系為參照,根據公式(7)計算各個焊縫離散點,生成位姿矩陣。
2、模擬效果分析
本次模擬實驗選取Robotstudio作為模擬工具,對ABB機器人的焊接作業進行模擬,主要包括機器人的六個關節。以下為模擬步驟:
第一步:將角焊接縫模型導入其中,在軟件中創建角焊縫模型,實施格式為.stl,而后將此模型導入工作站中。
第二步:在工作站中調用焊接輔助模型,開啟軟件數據庫后查詢即可獲取,對ABB機器人下達焊接操作命令。
第三步:設置角焊接路徑,借助可視化系統,控制機器人焊接路徑。
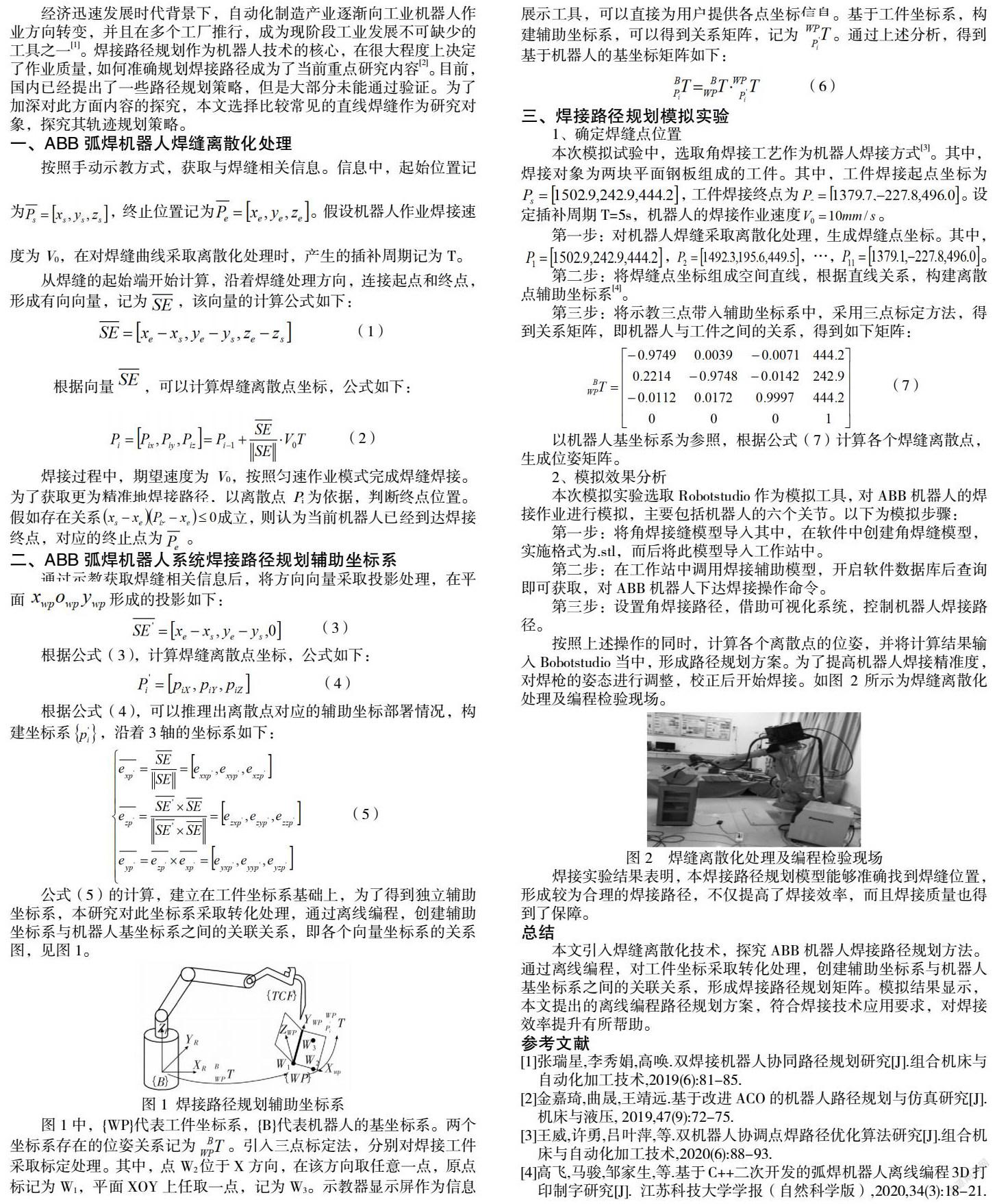
按照上述操作的同時,計算各個離散點的位姿,并將計算結果輸入Bobotstudio當中,形成路徑規劃方案。為了提高機器人焊接精準度,對焊槍的姿態進行調整,校正后開始焊接。如圖2所示為焊縫離散化處理及編程檢驗現場。
焊接實驗結果表明,本焊接路徑規劃模型能夠準確找到焊縫位置,形成較為合理的焊接路徑,不僅提高了焊接效率,而且焊接質量也得到了保障。
總結
本文引入焊縫離散化技術,探究ABB機器人焊接路徑規劃方法。通過離線編程,對工件坐標采取轉化處理,創建輔助坐標系與機器人基坐標系之間的關聯關系,形成焊接路徑規劃矩陣。模擬結果顯示,本文提出的離線編程路徑規劃方案,符合焊接技術應用要求,對焊接效率提升有所幫助。
參考文獻
[1]張瑞星,李秀娟,高喚.雙焊接機器人協同路徑規劃研究[J].組合機床與自動化加工技術,2019(6):81-85.
[2]金嘉琦,曲晟,王靖遠.基于改進ACO的機器人路徑規劃與仿真研究[J].機床與液壓, 2019,47(9):72-75.
[3]王威,許勇,呂葉萍,等.雙機器人協調點焊路徑優化算法研究[J].組合機床與自動化加工技術,2020(6):88-93.
[4]高飛,馬駿,鄒家生,等.基于C++二次開發的弧焊機器人離線編程3D打印制字研究[J]. 江蘇科技大學學報(自然科學版),2020,34(3):18-21.0755BD3A-2DDE-40FB-9894-31C0222E5135
