液體運載火箭線性自抗擾容錯姿態控制方法
2022-06-29 01:31:14魏遠明羅亞中朱海洋
載人航天 2022年3期
魏遠明, 羅亞中, 朱海洋
(1.國防科技大學空天科學學院, 長沙 410073; 2.北京宇航系統工程研究所, 北京 100076)
1 引言
中國航天的飛速發展對運載火箭發射成功率提出了更高要求。 為了有效提升成功率,主要采用以下2 種措施:①進一步提升運載火箭可靠性,從單機、系統和總體3 個層級提升整體可靠性設計水平;②使用新技術,如故障診斷和容錯控制技術,提高運載火箭在故障下的適應能力,進而提升任務成功率。
盡管目前發動機組件采取了冗余設計,可靠性大幅提高,但其失效對火箭而言是不可接受的。 通過故障診斷和控制重構算法,可利用其余正常工作的發動機和伺服機構來補償故障,保證正常入軌或減小入軌偏差。 針對發動機故障,主要有2 類解決方法:①先進行故障診斷,后進行控制重構,即通過發動機直采的力熱參數在線辨識進行故障診斷,得到相應故障信息,尤其是發動機推力下降比例,進而重構姿態控制算法;②無需故障診斷,僅通過魯棒自適應性強的控制器進行辨識或有效補償。 朱海洋等針對發動機故障,提出了基于徑向基神經網絡自適應的容錯控制方法,使用徑向基神經網絡在線辨識故障參數并補償,有效解決了故障下的姿態控制穩定和精度問題,但是該方法只針對剛體火箭,不適用于具有復雜剛晃彈特性的液體運載火箭。
對于具有復雜剛晃彈特性的大型液體運載火箭,容錯姿態控制應該考慮在保證箭體彈性振動和推進劑液體晃動穩定的同時,盡可能提升剛體動力學控制效果與性能。 目前國內外對于液體運載火箭姿態控制成熟方法均為PD+校正網絡控制器,其在有限偏差包絡內的控制效果是穩定的,尤其是校正網絡環節對慣組速率陀螺等傳感器信號的整形濾波作用,有效地保證了彈性振動和推進劑液體晃動穩定。 為有效提升控制器容錯性,在傳統控制器基礎上添加補償控制是研究應用重點方向之一。Orr 等提出了基于傳統控制器的自適應增廣控制方法(Adaptive Augment Control, AAC),在故障工況下可自適應調整開環增益來適應故障,但基于傳統PD 控制器,并未改變控制器結構,所以無法補償故障影響并消除偏差。
本文針對液體運載火箭常見的發動機故障,開展容錯姿態控制技術的研究。 借鑒自抗擾控制思想,在基線PD+校正網絡控制器基礎上,提出一種基于擴張狀態觀測器的線性自抗擾控制方法(Linear Active Disturbance Rejection Control,LADRC),該方法使用線性擴張狀態觀測器來觀測并補償回路總和擾動,通過時域仿真,與PD+校正網絡、自適應增廣控制方法對比,證明方法的有效性。
2 研究對象及動力學模型
2.1 研究對象
本文以某型新一代運載火箭助推飛行段為例,其助推段發動機布局如圖1 所示。
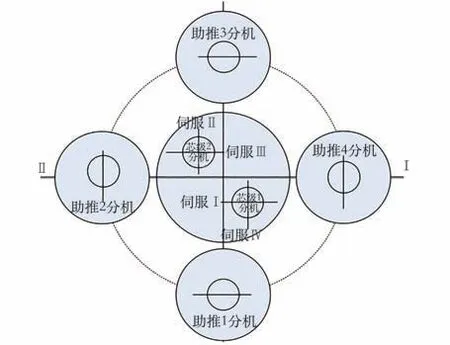
圖1 一級發動機布局Fig.1 Layout of the first stage engines
2.2 火箭動力學模型
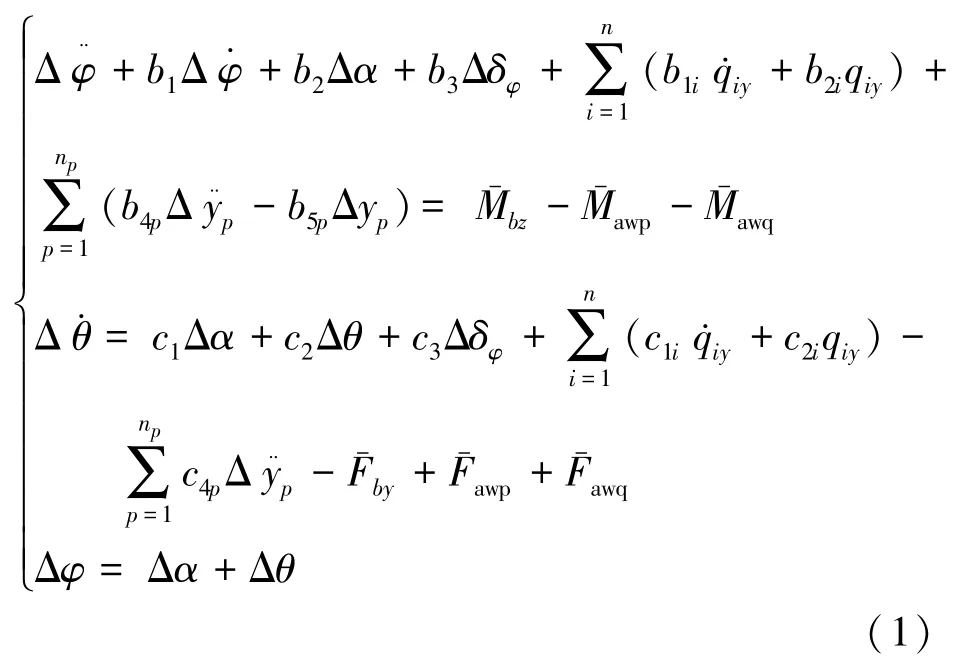
考慮推進劑晃動和箭體彈性振動,以俯仰通道為例,液體運載火箭一級飛行段姿態動力學線性模型如式(1)所示:

俯仰通道彈性振動方程如式(2)所示:
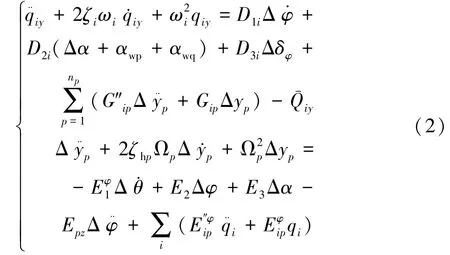

由式(1)、(2)可進一步建立表征運載火箭姿態動力學的廣義模型,實際可控動力學模型可表示為式(3):

式中,為模型狀態向量;為表征外界干擾和未建模動態特性項;(,,)=[(,,),(,,),(,,)]為俯仰、偏航、滾動通道中除輸入量之外的總和擾動項;=[,,]為俯仰、偏航、滾動通道的控制力矩系數矩陣;=[Δδ,Δδ,Δδ]為俯仰、偏航、滾動通道的控制輸入向量。
用通用模型表示的運載火箭姿態動力學模型如式(4)所示:
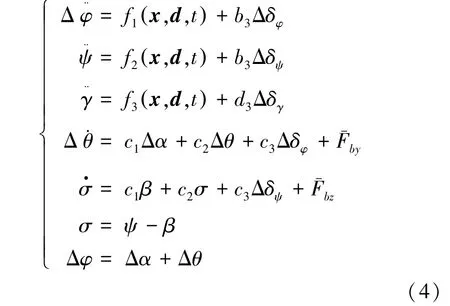
式中,,為偏航角及角加速度,,為滾轉角及角加速度,為彈道偏角,為側滑角。
3 傳統PD 控制方法與自適應增廣控制
3.1 傳統PD+校正網絡控制方法
對于液體運載火箭,傳統控制方法為PD+校正網絡控制方法,以俯仰通道為例,反饋控制方程如式(5)所示:


3.2 自適應增廣控制
采用Orr 等的自適應增廣控制改善傳統控制性能,算法核心思想是通過變增益使系統性能在動態性能和穩態性能之間調整,以適應當前工況,基本設計目標為:①僅在非標稱條件下才調整增益,標稱情況下不改變增益,從而不影響傳統控制方法的性能;②剛體誤差較大時,調大增益,提高系統動態性,而在控制-結構耦合嚴重的工況,降低增益,提高系統的穩態性;③在發生嚴重故障或者出現其他惡劣工況時,AAC 系統可防止或者延緩系統失控發散。
3.2.1 開環回路
開環回路增益表達式如式(6)所示:

式中,為開環回路增益,的上、下限可以從標稱系統模型的經典增益裕度確定;為自適應增益的初始值;k為增益的自適應項,如式(7)所示:

式中,為自適應誤差增益;為頻譜阻尼器增益;為溢出增益;(-k)為邏輯阻尼項;ae為誤差項,用以解決剛體誤差問題,調大增益,提高系統動態性能;-αky為頻譜阻尼器輸出,用以解決控制-結構耦合問題;-(-1)為溢出項,用以防止增益變化過快。
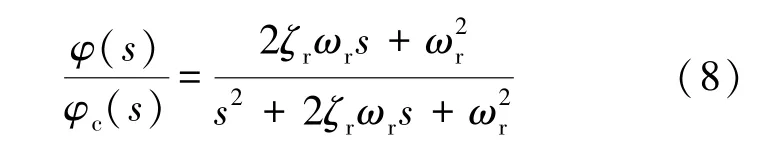
3.2.2 參考模型
控制系統模型使用二階系統作為參考模型,如式(8)所示:

3.2.3 頻譜阻尼器
頻譜阻尼器輸出信號由控制器控制指令輸出形成,如式(9)所示:
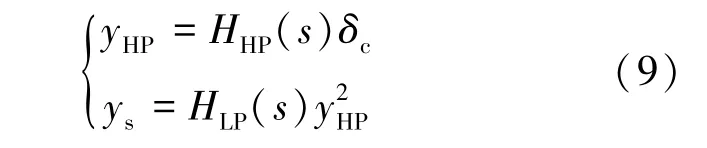
式中,為線性高通濾波器;為線性低通濾波器。 頻譜阻尼器結構如圖2 所示。

圖2 頻譜阻尼器結構Fig.2 Structure of spectrum damper
圖中高通濾波器和低通濾波器均為線性濾波器,,為濾波器截止頻率。
3.2.4 控制架構
AAC 控制回路結構如圖3 所示。
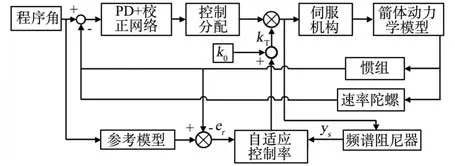
圖3 AAC 控制回路結構Fig.3 AAC control architecture
4 線性自抗擾容錯控制方法
AAC 控制方法僅調節開環回路增益,不改變控制回路結構,對系統容錯能力提升有限,本文提出LADRC 方法使用線性擴張狀態觀測器(Linear Expansion State Observer, LESO)來觀測并補償回路總和擾動,用以有效提升控制器容錯能力。
4.1 LESO 時域形式
以俯仰通道為例,其通用模型表達式如式(10)所示:

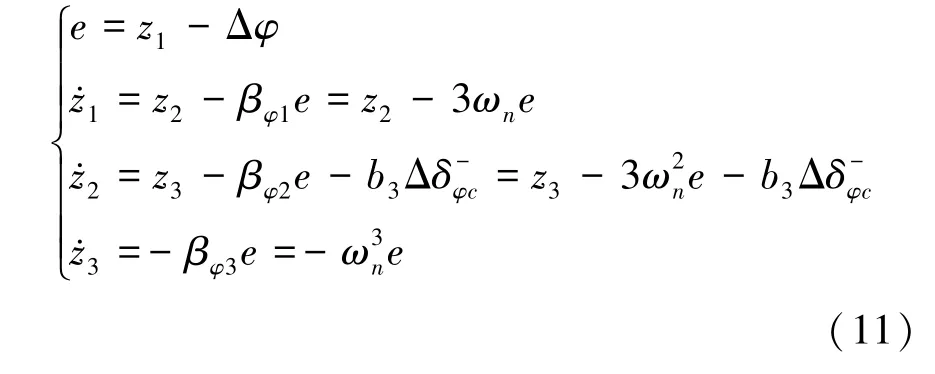
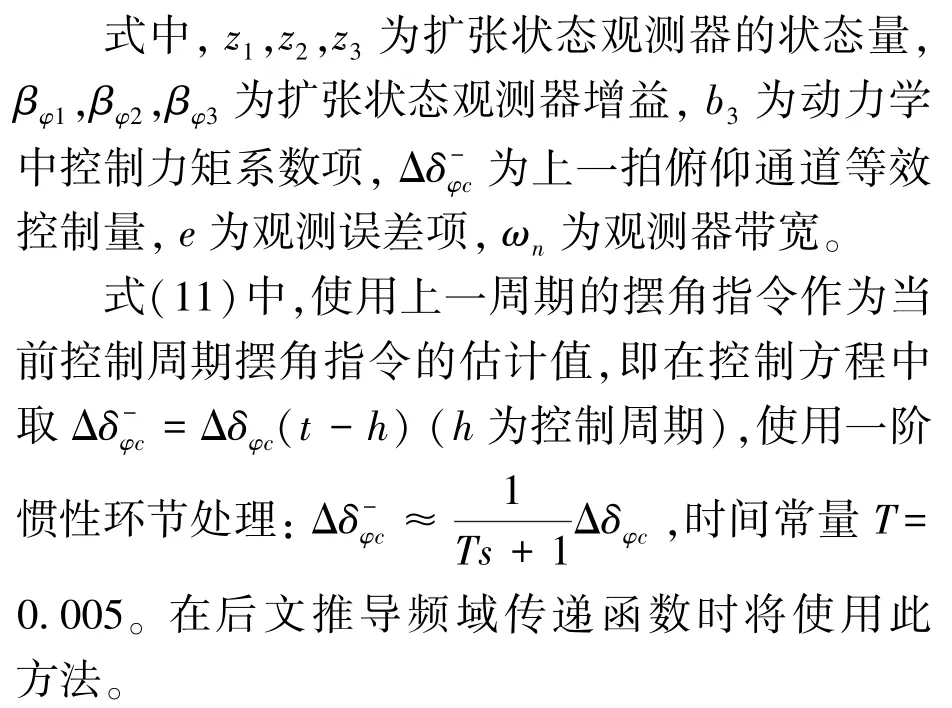
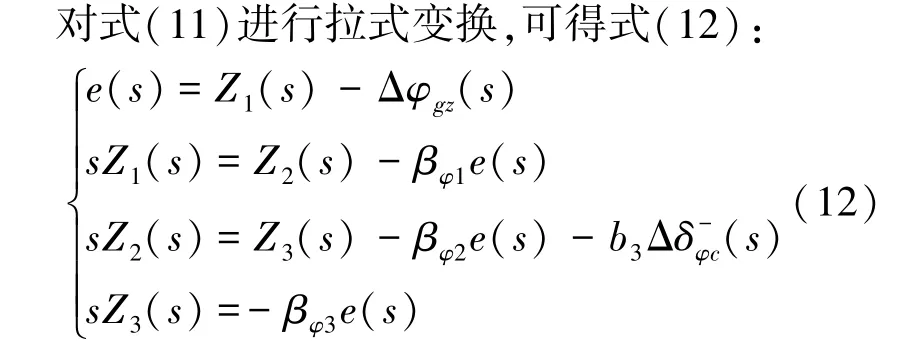
采用LESO 觀測總和擾動項(,,) ,觀測器采用式(11)形式:
4.2 LESO 傳遞函數形式
進一步推導傳遞函數并化簡,得到式(13):
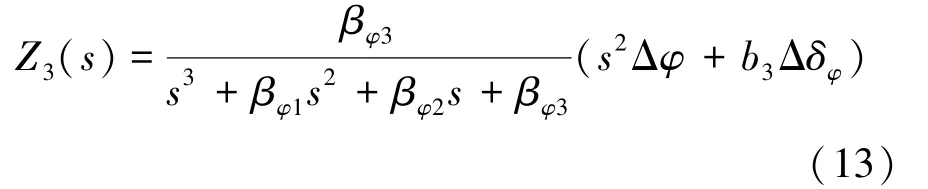
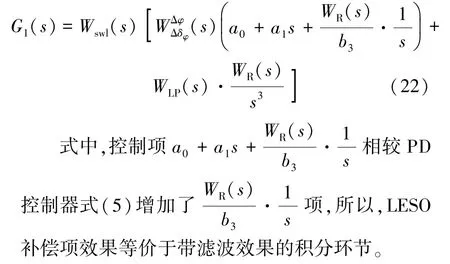
引入控制回路的為兩項乘積,相當于濾波提取了第1 項中的部分頻帶信息,第2 項相當于添加了帶濾波的積分項,可以一定程度上消除穩態誤差。
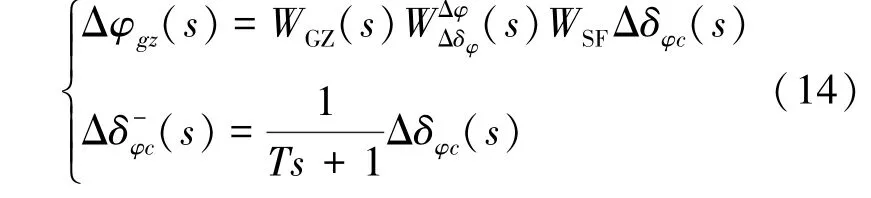
為進行頻域分析,需推導姿控回路的開環單輸入單輸出傳遞函數。 因為LESO 環節為多輸入單輸出環節,輸入量為Δφ(),Δδ() ,輸出量為(),使用擺角指令Δδ()表示輸入量,將系統轉換為單輸入單輸出(Single Input Single Output, SISO)系統,具體形式為式(14)所示:
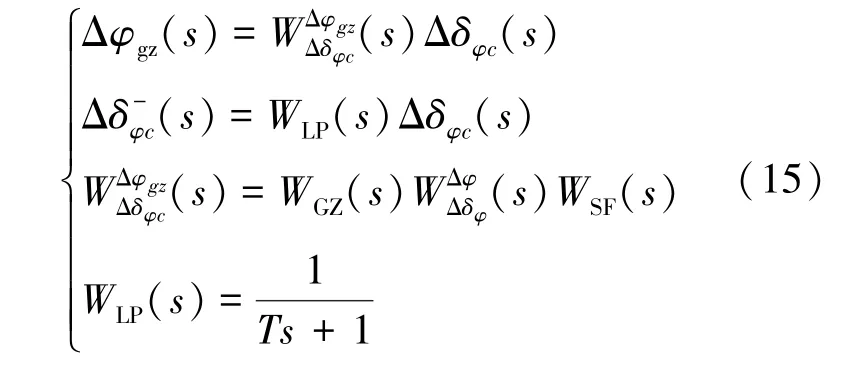
為便于后續推導,將式(14)中部分傳函合并,記為式(15):

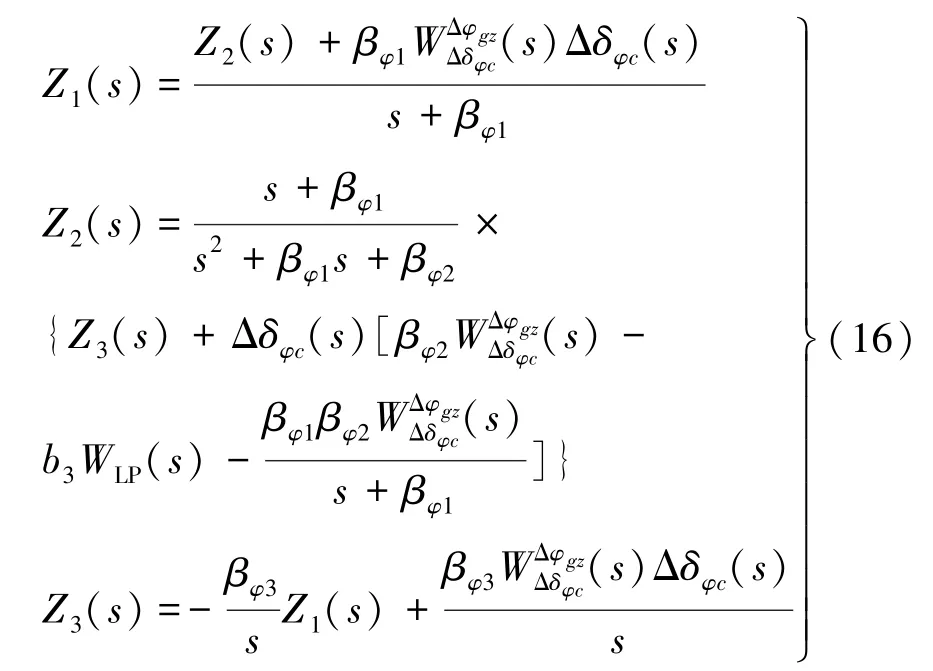
聯立式(12)~式(15)可得式(16):
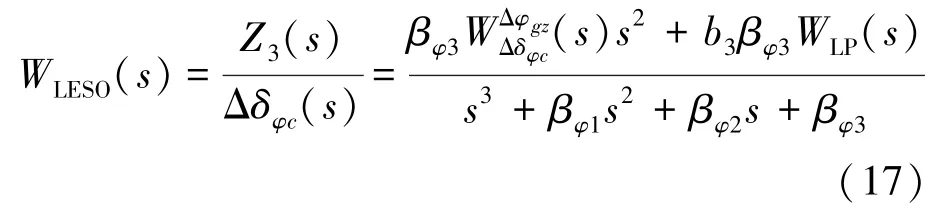
整理式(16)可得式(17):
為便于推導,設式(18)成立:

將式(18)代入式(17),可得LESO 環節的單輸入單輸出形式的傳遞函數,見式(19):
4.3 控制器及開環傳遞函數形式
得到被擴張的狀態()的估計值(),只要已知,控制量就可以得到,如式(20)所示:

式中,為擴張狀態觀測器觀測得到的總擾動,為動力學中控制力矩系數項,δ為PD 控制器計算控制量。 姿控回路結構如圖4 所示。
由圖4 可進一步推導形成姿控回路開環傳遞函數,如式(21)所示:

圖4 姿控系統結構圖Fig.4 Diagram of attitude control architecture

式中,()為剛性箭體姿控回路開環傳遞函數,為校正網絡環節,為伺服機構環節,為速率陀螺環節,為慣組環節。
將式(17)代入式(21),略去速率陀螺、慣組等測量環節和伺服機構環節,可得式(22):
4.4 頻域分析
本文以俯仰通道為例,基于4.3 節得到的開環傳遞函數,在頻域中分析不同帶寬參數對控制系統的影響,結果如表1 和圖5 所示。
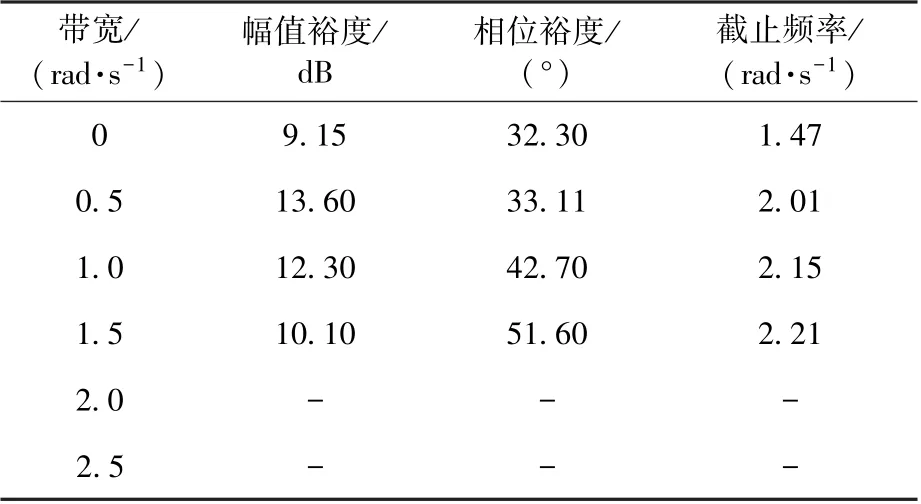
表1 俯仰通道頻域指標Table 1 Frequency domain indexes of pitch channel
從表1 和圖5 可以看出,LESO 的帶寬越大,對相位裕度和截止頻率提升的作用就越大,即LESO 環節對控制系統的阻尼和頻率均利好,閉環系統的過渡響應主要由截止頻率附近的特性所確定,此時越大,其相位裕度提升越明顯,系統阻尼比越高。 但是帶寬太大,會導致系統的魯棒性變差,由圖5 還可以看出,當>2 rad/s 時,系統幅頻響應曲線會提前穿越0 dB,導致系統的中頻區域魯棒性不好,無法獲得純剛體的幅值裕度與相位裕度,同時幅頻曲線整體向上平移,此時需要注意采用相位穩定的低頻信號(推進劑晃動和低階彈性)成分,在0 dB 以上信號的相頻曲線是否會穿越(2+1)π,造成正反饋失穩發散。
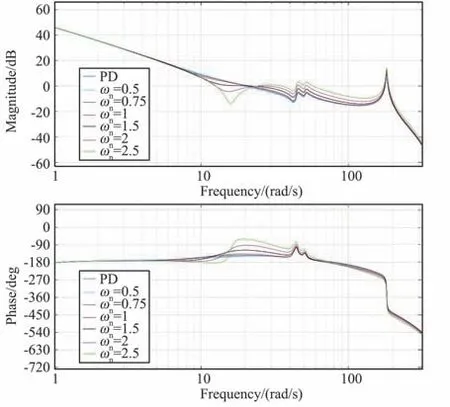
圖5 不同觀測器帶寬下的開環姿控系統Bode 圖Fig.5 Bode diagram of open?loop attitude control system under different observer bandwidths
結合頻域分析結果可總結LESO 帶寬參數整定規律如下:
1)LESO 的帶寬越大,其觀測效果越好,對于總和擾動的觀測效果就越好;
2)如果被控對象有低頻彈性模態或其他低頻運動模態,那么LESO 的帶寬不應過大,一般要小于被控對象的低頻晃動和彈性運動頻率,避免將觀測到的振動信號引入控制,導致控制-結構耦合問題;
3)LESO 重點觀測是剛體運動信號,即測量信號的低頻部分。 同時因為測量高頻部分信號噪聲較大,故LESO 帶寬不宜過大。
綜上,可明確適應剛晃彈復雜特性約束的液體運載火箭LESO 帶寬參數整定準則:高于系統開環截止頻率,且低于低階彈性晃動頻率。 本文研究對象一階彈性模態頻率為8 ~12 rad/s,液體晃動頻率約為4 rad/s,綜合考慮動態性能和穩定性,選取觀測器帶寬=1.5 rad/s 開展時域仿真。
5 仿真分析
基于前文所述運載火箭動力學模型,選擇助推3 號發動機推力下降典型故障工況,仿真分析LADRC 的故障容錯能力,并與PD +校正網絡、AAC 控制器進行對比。
5.1 參數設置
5.1.1 AAC 控制參數
取相關特征點,確定開環前向增益,使其上下界取值均可保證系統穩定,且裕度滿足幅值裕度6 dB, 相位裕度為20°, 故設定∈[0.5,1.5]。
頻譜阻尼器截取比一階彈性頻率更高階的頻率信號,故頻譜阻尼器的高通濾波器截止頻率=15 rad/s,為取得更好的整形效果,低通濾波器截止頻率=1 rad/s。
控制增益為:=5e3,=5e5,=0.1,=0.5,=0.5,=1.5。
5.1.2 LADRC 控制參數
基于4.4 節分析,綜合考慮系統的動態性和穩定性,設置LESO 帶寬系數=1.5 rad/s。
5.2 仿真分析
故障設置為從40 s 開始,助推3 號發動機推力下降100%。 仿真結果如圖6~圖14 所示。
通過圖6~圖8 可知,在40 s 植入故障之前,3 種控制器控制效果良好,俯仰、偏航、滾動3 個通道姿態角偏差均較小。 在40 s 植入故障后,俯仰通道PD+校正網絡控制回路作用下的角偏差觸發了9°失控門限;AAC 方法可保證系統角偏差小于9°,但整體控制誤差較大;LADRC 方法可保證系統穩定且控制誤差較小。
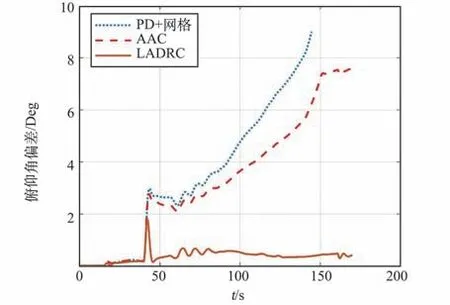
圖6 俯仰角偏差變化曲線Fig.6 Variation of pitch angle error
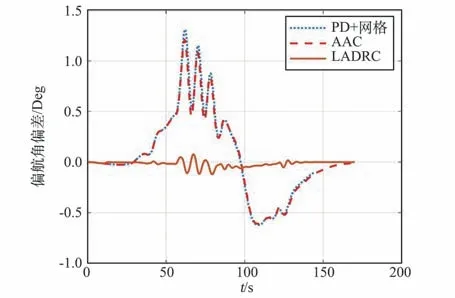
圖7 偏航角偏差變化曲線Fig.7 Variation of yaw angle deviation
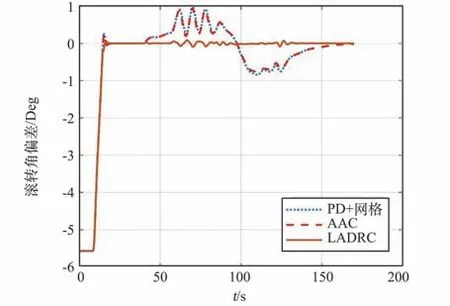
圖8 滾轉角偏差變化曲線Fig.8 Variation of roll angle deviation
通過圖9 ~圖11 可知,在故障發生后,AAC因為僅調整了開環控制增益,所以等效控制指令實際上是PD+校正網絡控制指令幅值的縮放,波形沒有本質改變。 但是LADRC 通過LESO 有效補償干擾和故障,其作用相當于帶濾波的積分項,使得在故障發生后,控制器快速響應,及時彌補了故障影響。
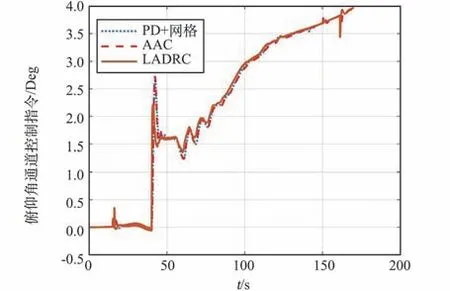
圖9 俯仰通道指令對比曲線Fig.9 Comparison of pitch channel commands
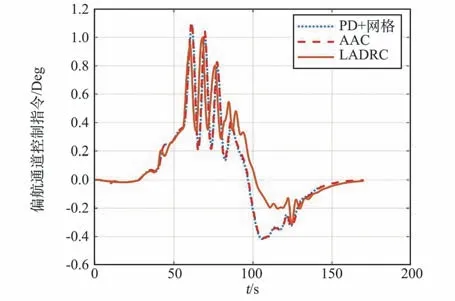
圖10 偏航通道指令對比曲線Fig.10 Comparison of yaw channel commands
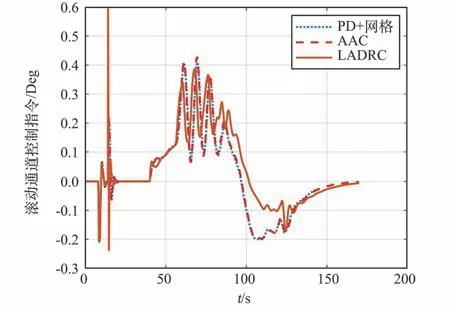
圖11 滾轉通道指令對比曲線Fig.11 Comparison of roll channel commands
通過圖12 ~圖14 可知,LADRC 通過LESO觀測可有效補償故障和外部干擾,在客觀控制能力允許范圍內最大程度挖掘控制能力。
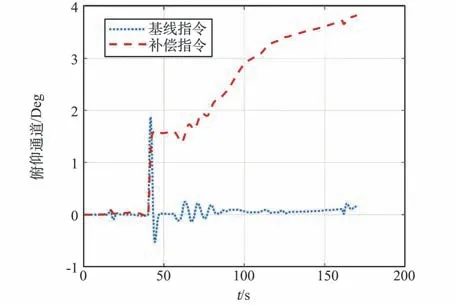
圖12 LADRC 俯仰通道指令變化曲線Fig.12 Variation of LADRC pitch channel commands
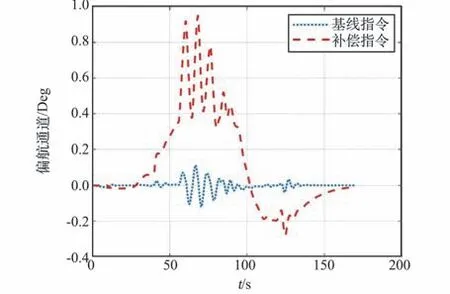
圖13 LADRC 偏航通道指令變化曲線Fig.13 Variation of LADRC yaw channel commands
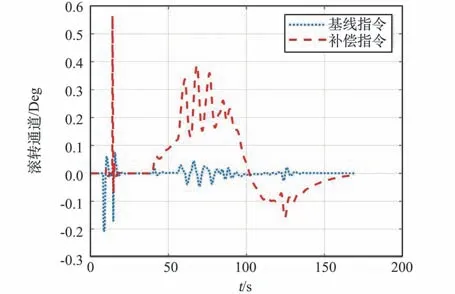
圖14 LADRC 滾轉通道指令變化曲線Fig.14 Variation of LADRC roll channel commands
6 結論
本文針對液體運載火箭發動機故障情況下的姿態控制問題,提出了線性自抗擾容錯姿態控制方法。
1)通過引入慣性環節,推導了包含線性擴張狀態觀測器的傳遞函數,解決了擾動觀測器環節難以形成傳遞函數,無法進行頻域分析的難題;
2)基于頻域分析,針對復雜剛晃彈特性約束液體運載火箭姿控問題,首次提出線性擴張狀態觀測器帶寬參數的整定準則,有效解決了多約束參數難整定的問題。
3)通過時域仿真分析,在給定相同發動機故障工況下,線性自抗擾容錯控制方法對故障適應能力明顯優于傳統控制方法和自適應增廣控制。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
兒童故事畫報(2019年5期)2019-05-26 14:26:14
汽車維護與修理(2016年10期)2016-07-10 08:17:41
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34