30倍輕小型變焦光學系統(tǒng)設計
2022-06-30 13:34:32李京宸
光學精密工程 2022年11期
關鍵詞:設計
張 坤,曲 正,鐘 興,李京宸,張 茜
(1.中國科學院 光電技術研究所,四川 成都 610207;2.中國科學院 長春光學精密機械與物理研究所,吉林 長春 130033;3.長光衛(wèi)星技術有限公司,吉林 長春 130102)
1 引 言
變焦光學系統(tǒng)調節(jié)凸輪能夠使鏡頭的焦距連續(xù)地變化,從而使被觀測物體的成像倍率連續(xù)地變大[1]。因此,變焦光學系統(tǒng)不僅可以對感興趣的目標進行廣域的搜索,而且還能進行精密的跟蹤和詳細的觀察[2-3]。變焦光學系統(tǒng)在目標跟蹤、無人機光電吊艙、安防監(jiān)測以及攝影等諸多領域都得到了廣泛的應用[4-6]。
變焦光學系統(tǒng)的變焦類型可分為4種:光學式變焦、機械補償式變焦、雙組聯(lián)動式變焦和全動型變焦。同其他變焦類型相比,機械補償式變焦光學系統(tǒng)通過改變變倍組和補償組的相對位置,可以連續(xù)地改變整個光學系統(tǒng)的焦距,具有結構簡單和研制成本低廉等優(yōu)點。然而,機械補償式變焦光學系統(tǒng)已經(jīng)發(fā)展了幾十年,卻仍然存在大變倍比和輕小型的設計矛盾[7-9]。2019年,張健等[10]利用正組補償結構設計了一款焦距為30~300 mm的機械補償式變焦光學系統(tǒng),通過引入非球面和漸暈的方法把整個系統(tǒng)的質量從937 g減小到了584 g,但整個系統(tǒng)的長度仍然高達330 mm,其凸輪曲線也出現(xiàn)了拐點。2020年,劉圓等[11]設計了一款焦距為50~1 000 mm的機械補償式變焦光學系統(tǒng),該光學系統(tǒng)由28片球面透鏡組成,最大口徑為100 mm,總長為399.9 mm。2020年,劉云鵬等[12]設計了一款50倍五組變焦光學系統(tǒng),該系統(tǒng)的第二組元和第三組元是運動組元,第四個組元是一個可替換透鏡組元。整個系統(tǒng)結構緊湊,但論文中并沒有對該系統(tǒng)是否具有50倍連續(xù)變焦的功能進行分析。
為了解決機械補償式變焦光學系統(tǒng)大變倍比和輕小型設計之間的矛盾,本文對大變倍比變焦光學系統(tǒng)的光焦度分配方式進行了理論分析,并利用平滑換根取段和變F數(shù)的方法來實現(xiàn)輕小型設計,從而提出了一種大倍率輕小型機械補償式變焦光學系統(tǒng)設計方法,使用全球面透鏡設計了一款焦距為7~210 mm的機械補償式變焦光學系統(tǒng),該變焦系統(tǒng)的最大口徑為67 mm,全長為190 mm。
2 原 理
2.1 大倍率變焦光學系統(tǒng)的光焦度分配
機械補償式變焦光學系統(tǒng)應用非常廣泛,其光學系統(tǒng)僅有兩條凸輪曲線,即一條直線和一條曲線。同雙組聯(lián)動型變焦光學系統(tǒng)和全動型變焦光學系統(tǒng)[12]相比,機械結構更加簡單、研發(fā)成本更低。然而,機械補償式變焦光學系統(tǒng)分為負組補償式變焦光學系統(tǒng)和正組補償式變焦光學系統(tǒng)兩種結構,負組補償式變焦光學系統(tǒng)的特點是整個光學系統(tǒng)的口徑大、長度短,正組補償式變焦光學系統(tǒng)的特點是整個光學系統(tǒng)的口徑小、長度長[13]。機械補償式變焦光學系統(tǒng)中,前固定組、變倍組、補償組和后固定組的光焦度分配有多種形式[14]。
當密接薄透鏡組位于空氣中時,透鏡組的位置色差和倍率色差分別為:
其中:N為薄透鏡組中薄透鏡的個數(shù),φ為薄透鏡的光焦度,υ為透鏡的阿貝數(shù),h為透鏡的半通光口徑,hz為主光線在透鏡表面上的入射高度。根據(jù)式(1)和式(2)可知,變焦光學系統(tǒng)前固定組的口徑越大,前固定組的色差越大。為了減小前固定組的色差,前固定組的光焦度越小越好,即焦距越大越好。
負組補償式變焦光學系統(tǒng)的口徑大、長度短。根據(jù)式(1)和式(2)可知,光學系統(tǒng)的口徑越大色差越大,色差校正越困難。根據(jù)球差方程:

其中:n為透鏡的折射率,i,i'分別表示光線的入射角和出射角,u為第一近軸光線的孔徑角。變焦光學系統(tǒng)的口徑越大,h越大,光學系統(tǒng)的球差越難校正。正組補償式變焦光學系統(tǒng)的口徑小、長度長。因此,與負組補償變焦光學系統(tǒng)相比,正組補償變焦光學系統(tǒng)對色差和球差的校正能力更強。綜上分析可知,在不使用特殊光學元件的時候,正組補償結構更適合大倍率變焦光學系統(tǒng)設計。
正組補償式變焦光學系統(tǒng)前固定組的光焦度通常為正值,后固定組的光焦度可為正值也可為負值。當后固定組的光焦度為正值時,為了滿足光焦度分配方程,前固定組的正光焦度將變小。由式(1)和式(2)可知,前固定組的光焦度越小,位置色差和倍率色差就越小。因此,后固定組的光焦度為正值的正組補償式變焦光學系統(tǒng)更有利于色差校正。
綜上所述,當機械補償式變焦系統(tǒng)的前固定組、變倍組、補償組和后固定組的光焦度分配分別為“+,-,+,+”時,更有利于大倍率變焦光學系統(tǒng)的像差校正。
2.2 初始結構計算
當機械補償式變焦系統(tǒng)的前固定組、變倍組、補償組和后固定組的光焦度分配分別為“+,-,+,+”時,變焦光學系統(tǒng)的變焦原理如圖1所示。從圖1可知,機械補償式變焦光學系統(tǒng)有4個組元,分別為前固定組、變倍組、補償組和后固定組,各組元對應的光焦度分別為φ1,φ2,φ3和φ4。當變焦光學系統(tǒng)位于短焦位置時,變倍組距離前固定組最近,補償組距離后固定組最近。當變焦光學系統(tǒng)逐漸由短焦向長焦變化時,變倍組將逐漸向右遠離前固定組,補償組向左遠離后固定組,最后變倍組和補償組的距離達到最小值,此時光學系統(tǒng)的焦距最長。
在計算變焦光學系統(tǒng)的初始結構時,為了避免相鄰組元在運動過程中發(fā)生碰撞,相鄰組元之間必須留有足夠的間距。這里利用高斯光學來計算變焦光學系統(tǒng)的初始結構[15]。

圖1 正組補償變焦光學系統(tǒng)原理Fig.1 Principle diagram of positive group compensation zoom optical system
在變焦光學系統(tǒng)中,假設變倍組和補償組的歸一化焦距分別為f2'和f3',根據(jù)長焦距時變倍組和補償組的歸一化倍率m2l和m3l,可得變倍組與補償組之間的距離為:

變倍組從長焦距變化到短焦的總移動距離為:

短焦時變倍組的倍率為:

根據(jù)變焦微分方程可得短焦距時補償組的倍率m3s:
補償組從長焦距變化到短焦的總移動距離為:

變焦光學系統(tǒng)的總變倍比可表示為:
當變焦光學系統(tǒng)在短焦時,前固定組和變倍組的距離為d12s,補償組與后固定組的距離為d34s,后固定組的倍率為m4s,則光學系統(tǒng)前固定組的焦距f1'為:

其中:l'3s表示光學系統(tǒng)在短焦時補償組的像距。
根據(jù)式(7)可知,變倍組的一個位置對應補償組的兩個位置。因此,利用補償組的這兩個位置可以進行換根,變焦光學系統(tǒng)的平滑換根原理如圖2所示。圖中,A1-A2-A3為變倍組的運動軌跡,B1-B2-B3和C1-C2-C3為補償組對應的兩條運動軌跡。

圖2 平滑換根原理Fig.2 Schematic diagram of smooth root exchange
若要保證補償組的運動曲線不出現(xiàn)拐點,必須使補償組的兩條運動曲線相切以實現(xiàn)平滑換根,即在B2和C2處相切。此時,相切處補償組的放大倍率m3m應滿足:

平滑換根的補償組仍然具有兩條運動曲線,即B1-B2-B3和C1-B2-B3。從A1運動到A3的過程中,變倍組放大率的絕對值一直在增大。從C1運動到B2再運動到B3的過程中,補償組放大率的絕對值也一直在增大。因此,當補償組的運動曲線為C1-B2-B3時,光學系統(tǒng)可實現(xiàn)快速變焦。
綜上所述,根據(jù)式(4)~式(13)并利用參數(shù)設定的方法,可計算出f1',f2',f3',f4'和各組元之間的距離。
3 變焦光學系統(tǒng)設計
3.1 設計指標
光學系統(tǒng)的設計指標與用戶使用的要求和所選探測器的參數(shù)相關。本文所選探測器的像元尺寸為4.8μm×4.8μm,其對應的奈奎斯特頻率為104 lp/mm。為了滿足廣域搜索和高分辨率觀察的應用需求,變焦光學系統(tǒng)的詳細設計指標如表1所示。
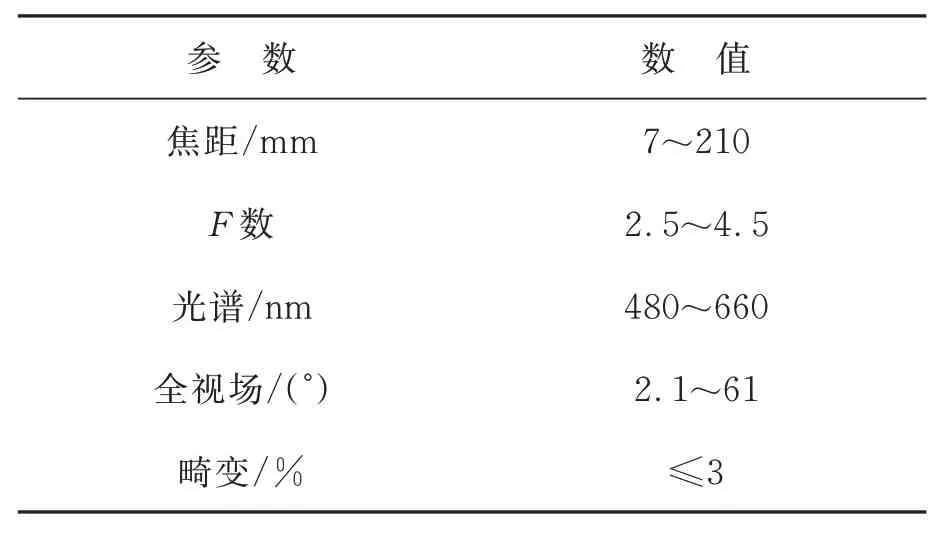
表1 變焦光學系統(tǒng)的設計指標Tab.1 Design parameters of zoom optical system
3.2 光學系統(tǒng)設計
根據(jù)2.2節(jié)可知,式(4)~式(13)屬于欠定方程組,因此機械補償式變焦光學系統(tǒng)的初始結構具有多重解。為了快速有效地解算出較佳的初始結構,本文提出了利用參數(shù)設定和光學設計軟件聯(lián)合解算的方法。解算步驟如下:
(1)為了實現(xiàn)補償組平滑換根,以變倍組和補償組的放大倍率為-1作為計算的起始狀態(tài),假設變倍組的焦距為-1,計算出補償組的焦距、補償組與變倍組的物像距離和它們之間的間距;
(2)設定長焦時變倍組的放大率,求取長焦時變倍組的物距、像距和沿光軸的移動量,再通過變倍比計算出短焦時變倍組和補償組的放大倍率等參數(shù);
(3)以起始狀態(tài)為基準(變倍組和補償組的放大率為-1),計算短焦時光學系統(tǒng)的參數(shù);
(4)選取短焦狀態(tài),計算出前固定組的焦距;
(5)選取短焦狀態(tài),設定后固定組的放大率,再計算出后固定組的焦距;
(6)通過系統(tǒng)參數(shù)縮放,獲得長焦、中焦和短焦時各組元之間的距離;
(7)把計算出的參數(shù)帶入光學設計軟件中,對系統(tǒng)的光闌位置和F數(shù)等參數(shù)進行優(yōu)化,并保證光學系統(tǒng)結構緊湊和變焦曲線平滑無拐點。
利用上述計算方法,對30倍變焦光學系統(tǒng)的初始結構進行解算和優(yōu)化,最后得到變焦光學系統(tǒng)中各組元的焦距,如表2所示。

表2 四組元的初始焦距Tab.2 Focal length of four groups in initial structure
變焦光學系統(tǒng)的焦距分別在7,60和210 mm處各組元之間的間距如表3所示。
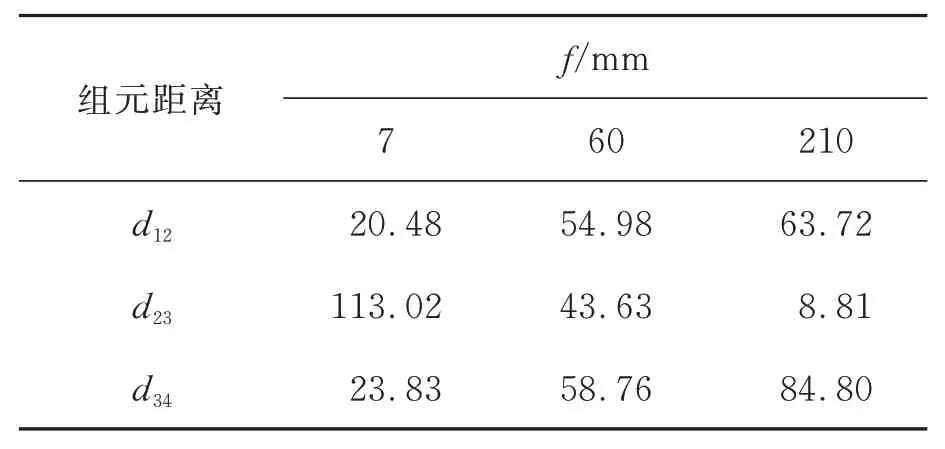
表3 四組元之間的間距Tab.3 Spacing between four groups
變焦光學系統(tǒng)的理想結構模型如圖3所示。變焦光學系統(tǒng)的總長為180 mm,孔徑光闌位于補償組前方1 mm處。在連續(xù)變焦的過程中,孔徑光闌與補償組同步運動,孔徑光闌的口徑保持不變,光學系統(tǒng)的F數(shù)會隨著焦距的變化不斷改變。
從圖3可知,光學系統(tǒng)的焦距從7 mm連續(xù)變化到210 mm的過程中,變倍組逐漸遠離前固定組,補償組逐漸靠近前固定組。在連續(xù)變焦的過程中,兩條變焦曲線沒有出現(xiàn)拐點。
把表2和表3中的數(shù)據(jù)代入光學設計軟件中進行透鏡替換,經(jīng)過優(yōu)化設計得到的變焦光學系統(tǒng)的結構如圖4所示。變焦光學系統(tǒng)的全長為190 mm,最大口徑為67 mm。
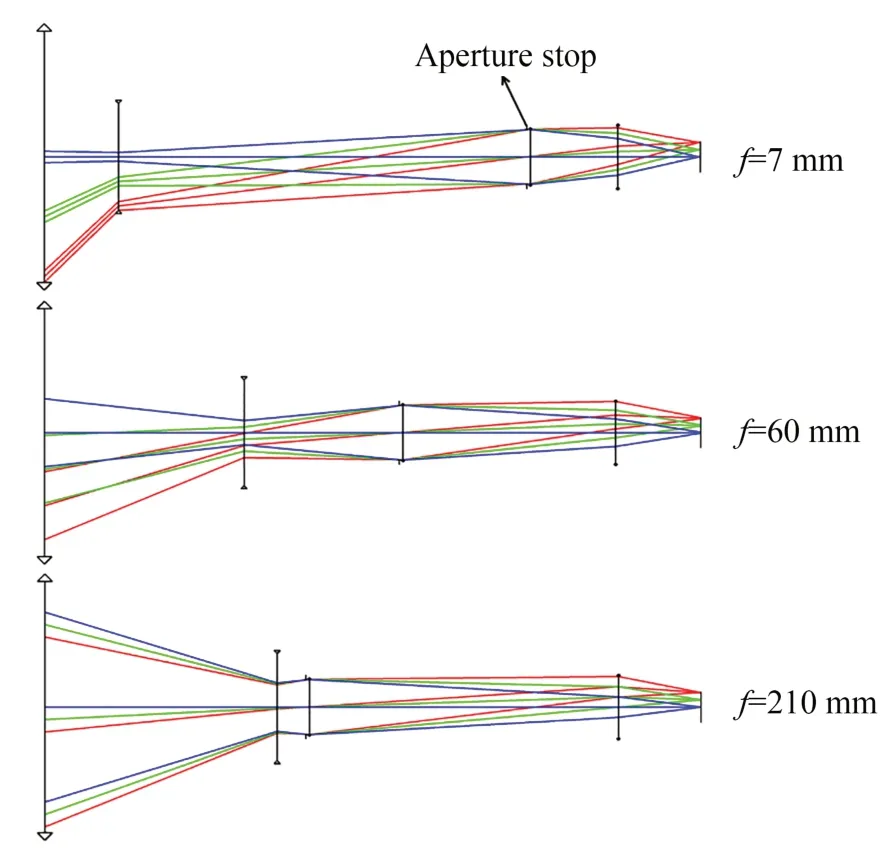
圖3 變焦光學系統(tǒng)的理想模型Fig.3 Ideal model of zoom optical system
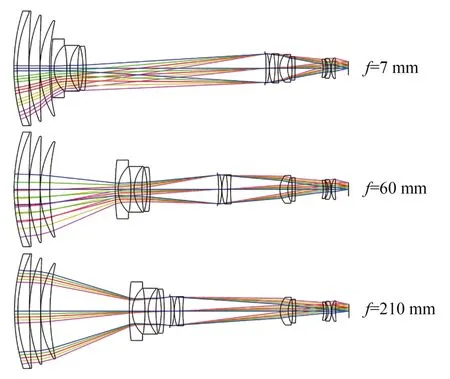
圖4 變焦光學系統(tǒng)結構Fig.4 Structure diagram of zoom optical system
4 系統(tǒng)評價與分析
4.1 像質評價
調制傳遞函數(shù)(Modulation Transfer Function,MTF)、點列圖和畸變是評價光學系統(tǒng)成像質量的重要指標。MTF表示光學系統(tǒng)成像的調制度變化情況,通過MTF曲線可以比較全面地評價系統(tǒng)的成像質量。圖5為變焦光學系統(tǒng)的MTF曲線,由圖5可知,當變焦光學系統(tǒng)的焦距分別為7,60和210 mm時,奈奎斯特頻率104 lp/mm處全視場的平均MTF均大于0.25。
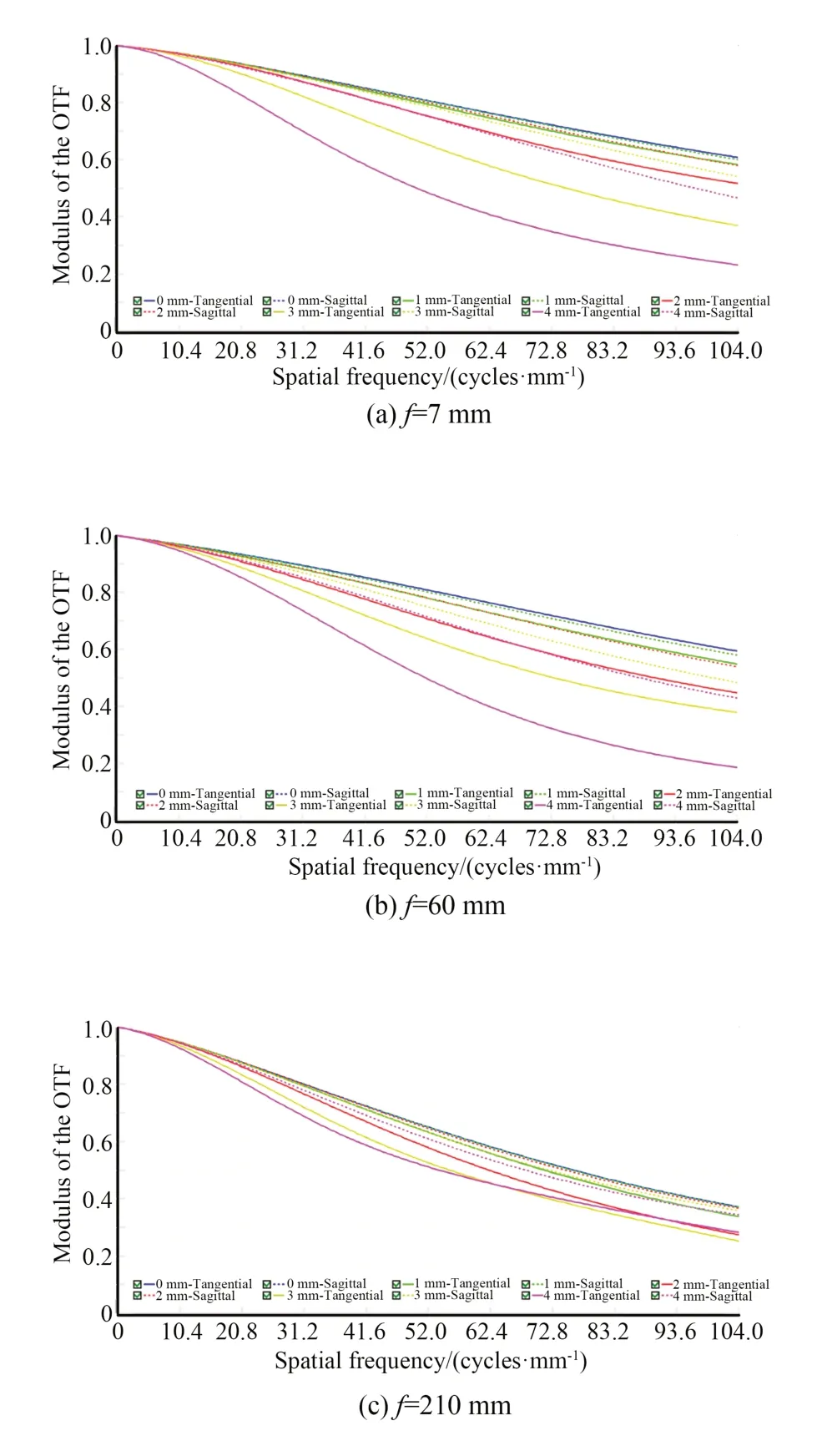
圖5 變焦光學系統(tǒng)的MTF曲線Fig.5 MTF curves of zoom optical system
點列圖可以比較準確地反應出光學系統(tǒng)成像光線的彌散情況。點列圖中的均方根(Root Mean Square,RMS)彌散斑半徑越小,光學系統(tǒng)的成像質量就越好。圖6為變焦光學系統(tǒng)的焦距分別為7,60和210 mm時的點列圖。
圖7為變焦光學系統(tǒng)的焦距分別為7,60和210 mm時的場曲和畸變曲線。從圖7可知,光學系統(tǒng)全焦段的畸變都小于3%。
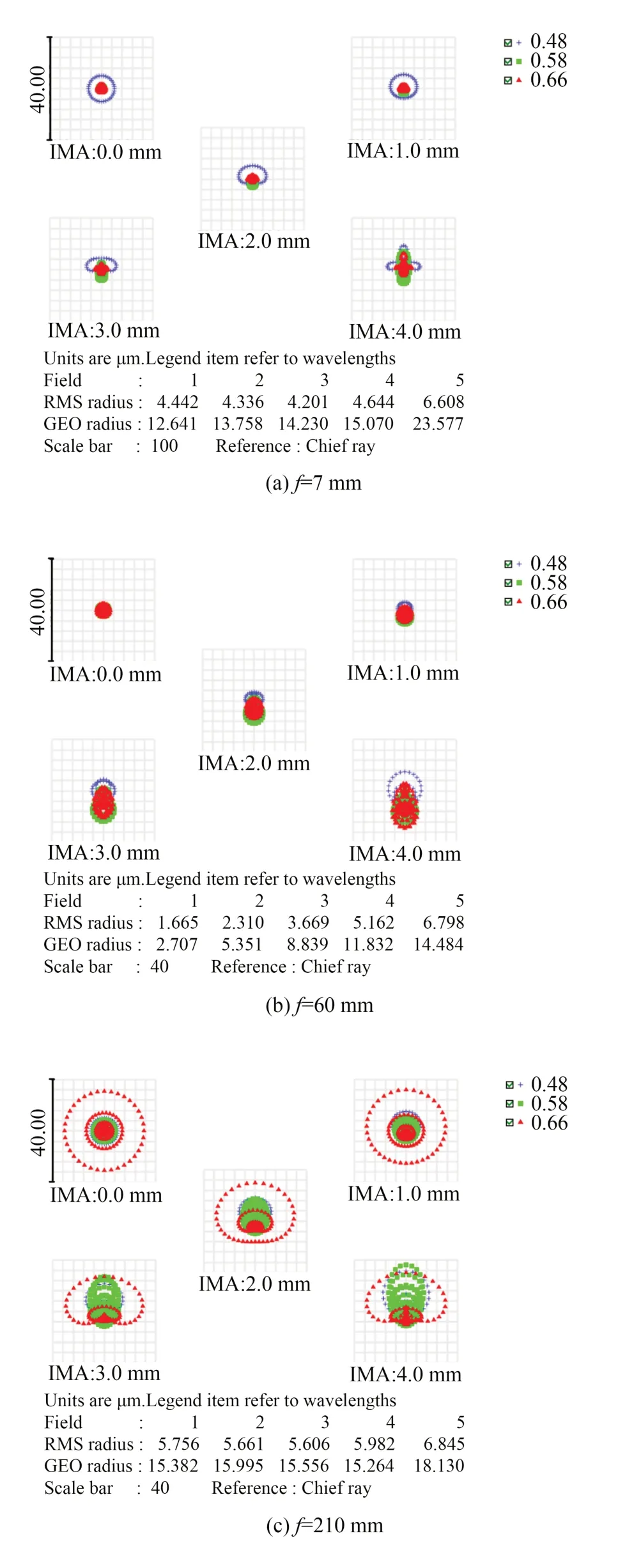
圖6 點列圖Fig.6 Spot diagram
4.2 公差分析
公差分析是變焦光學鏡頭加工裝配前的重要分析環(huán)節(jié)之一,利用光學設計軟件中的公差分析功能,可以快速有效地評估出變焦鏡頭的制造難度。綜合考慮變焦光學系統(tǒng)在短焦、中焦和長焦處時各光學透鏡的公差靈敏度,最終確定變焦光學系統(tǒng)的公差分配情況,如表4所示。

圖7 場曲和畸變曲線Fig.7 Field and distortion curves
根據(jù)蒙特卡洛分析可得,當采用表4的分配公差時,變焦光學系統(tǒng)在奈奎斯特頻率104 lp/mm處全視場的平均MTF分布規(guī)律如圖8所示。蒙特卡洛分析表明,80%的系統(tǒng)在全焦段內的MTF均大于0.14。
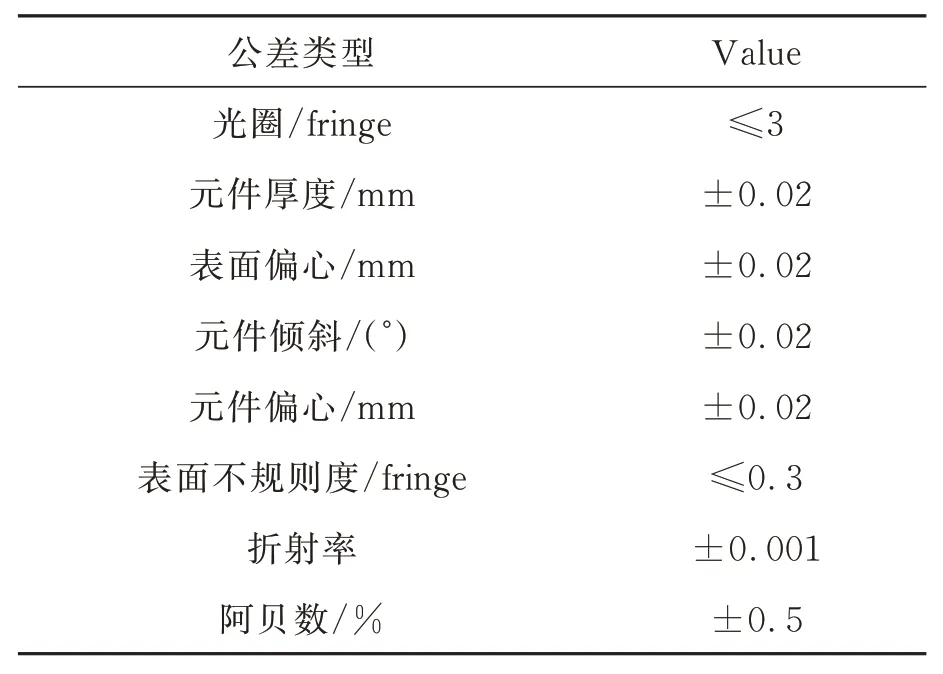
表4 變焦光學系統(tǒng)的公差分配Tab.4 Tolerance distribution of zoom optical system
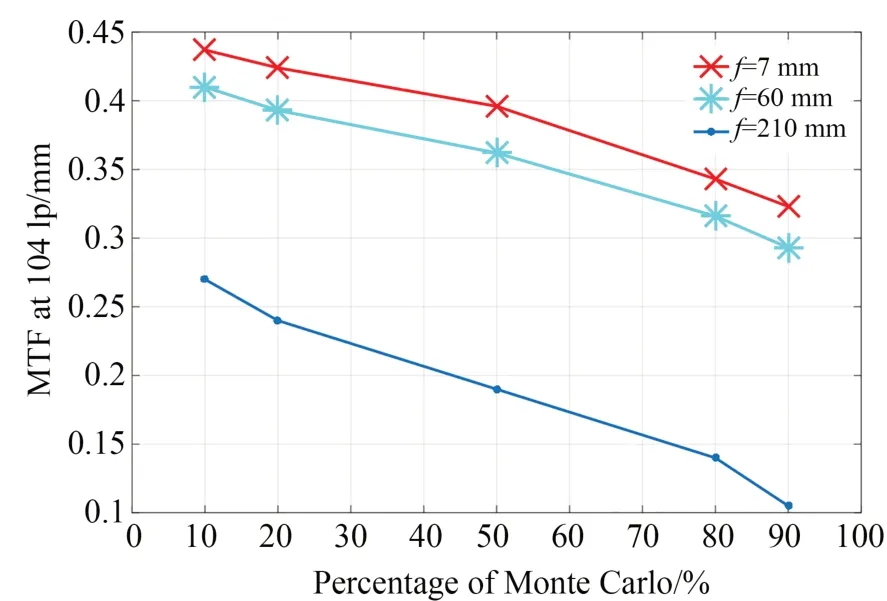
圖8 蒙特卡洛分析概率Fig.8 Probability of Monte Carlo analysis
4.3 變焦曲線
在變焦光學系統(tǒng)中,若變焦曲線出現(xiàn)了拐點,極可能會出現(xiàn)變焦卡死的現(xiàn)象。因此,為了能夠保證變焦鏡頭平滑變焦,變焦曲線盡量不要出現(xiàn)拐點[16-17]。此外,機械補償式變焦光學系統(tǒng)在變焦曲線設計的過程中,為了降低凸輪的加工難度,一條變焦曲線設計為直線,另外一條變焦曲線設計為高次曲線。
本文的30倍變焦光學系統(tǒng)采用變倍組線性運動,補償組非線性運動的方式進行連續(xù)變焦。當變焦鏡頭的凸輪直徑為50 mm時,變倍組和補償組與凸輪旋轉角度的變化曲線如圖9所示。

圖9 凸輪擬合曲線Fig.9 Fitting cam curves
5 結 論
為了緩解機械補償式變焦光學系統(tǒng)大變倍比和輕小型設計之間的矛盾,本文提出采用平滑換根的“+,-,+,+”光焦度分配方式,結合變F數(shù)的方法來實現(xiàn)輕小型設計,并提出利用結構參數(shù)設定和光學設計軟件聯(lián)合解算的方法,來合理地分配各組元的光焦度,保證變焦曲線平滑無拐點,從而快速有效地解算出變焦光學系統(tǒng)的初始結構參數(shù),提高光學系統(tǒng)設計的成功率。利用全球面透鏡設計了一款焦距為7~210 mm的30倍連續(xù)變焦光學系統(tǒng),可匹配1/2英寸的探測器,該變焦系統(tǒng)的最大口徑為67 mm,全長為190 mm,在奈奎斯特頻率處全視場的MTF均大于0.25,該系統(tǒng)還具有全視場無漸暈、變焦曲線無拐點、制造成本低廉等優(yōu)點,在目標跟蹤、安防監(jiān)測等領域具有廣泛的應用前景。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
