基于改進聚類的機體損傷識別方法研究
2022-07-03 00:28:16范杰司偉森巴翔
航空科學技術 2022年5期
范杰 司偉森 巴翔
摘要:為了清晰快速地辨識飛機機體損傷區域,引入K均值聚類算法處理損傷圖像,通過分析K均值聚類算法的局限性,提出了基于誤差平方和差值以及基于像素點變化的聚類迭代終止條件的優化方法,并通過飛機機體損傷圖像實例,從損傷識別效果和運算效率兩個方面進行驗證。驗證結果顯示,基于改進聚類的機體損傷識別方法,在保證圖像損傷區域識別效果的同時,明顯減少了迭代次數,提高了聚類算法的運算效率,可以滿足飛機機體損傷高效識別的要求。
關鍵詞:損傷區域劃分;圖像識別;K均值聚類算法
中圖分類號:V267文獻標識碼:ADOI:10.19452/j.issn1007-5453.2022.05.005
隨著圖像處理技術的不斷發展,彩色圖像中目標區域提取技術已廣泛應用于諸多領域,但由于應用領域的差異和目標區域的復雜性,提取彩色圖像中有意義的目標區域一直是難點問題。
聚類算法以其簡單高效的分類機制成為圖像目標區域高效提取的典型算法。目前,主流的聚類算法主要有兩步聚類、層次聚類和K均值聚類算法[1]。其中,K均值聚類算法對大規模圖像集的高效處理,使其成為最常用的聚類算法之一。周宏元等[2]將K均值聚類引入蝴蝶優化算法,實現土木工程結構損傷識別。趙楊超等[3]利用K均值聚類實現對航空復合材料的敲擊檢測。劉立坤等[4]引入聚類算法提出顫振模態參數自動辨識方法。但由于K均值聚類算法過分依賴于迭代次數的設定且對離群點和噪聲點敏感,聚類結果經常為局部最優而非全局最優[5]。
本文面向機體損傷識別方法研究,針對K均值聚類算法的局限性,研究K均值聚類改進算法,解決迭代次數人工設定問題,實現損傷區域的精準聚類,進而實現機體損傷的高效識別。
1 K均值聚類算法
由于服役條件、維護修理不當、設計制造缺陷等因素,航空結構在服役過程中容易產生小損傷[6]。當造成非常細微且無法用肉眼進行觀察的飛機機體損傷時,需要對損傷區域進行圖像處理來損傷識別[7]。圖像的顯示是由不同的灰度像素點組成的,通過K均值聚類法確定銹蝕和完好區域范圍,將圖像上的像素點劃分到這兩類區域中,達到區分損傷區域的目的,從而方便維修[8]。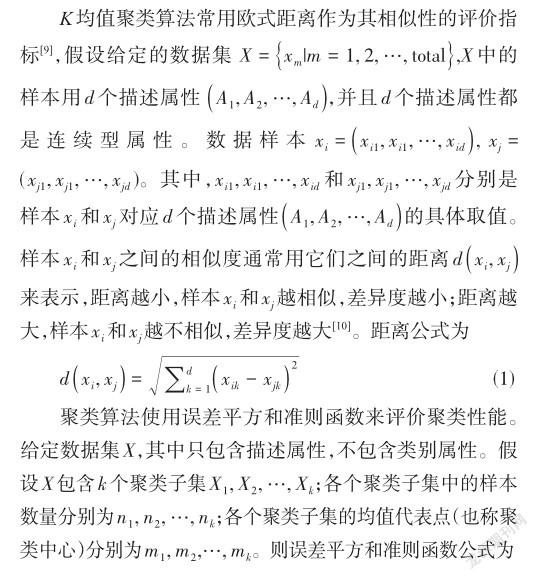
相似度的計算根據一個簇中對象的平均值來進行。具體為:(1)將所有對象隨機分配到k個非空的簇中;(2)計算每個簇的平均值,并用該平均值代表相應的簇;(3)根據每個對象與各個簇中心的距離,分配給最近的簇;(4)然后轉第(2)步,重新計算每個簇的平均值。這個過程不斷重復,直到滿足聚類中心不再改變或者達到最大迭代次數。
2 K均值聚類算法的改進
K均值聚類算法的計算準確度由其迭代次數決定。一般迭代終止條件是聚類中心不再改變或者達到最大迭代次數,以節省計算時間[11-12]。而機體損傷區域識別中,K均值聚類的迭代后期,聚類中心雖未達到穩定值,但從圖像上觀察,肉眼難以分辨輸出圖像的差異,對損傷辨識效果沒有影響。本文提出基于誤差平方和差值以及基于像素點變化的兩種改進迭代終止條件,確定觀察圖像最佳迭代次數的迭代終止參數。
2.1基于誤差平方和差值的優化方法
K均值聚類算法停止迭代的條件是聚類中心不變或者達到最大迭代次數,可使用改進誤差平方和方法,由于迭代后期誤差平方和變化較小,則設定迭代終止條件為前后兩次迭代過程誤差平方和之差小于閾值時即停止迭代,保證損傷辨識效果的同時減少迭代次數。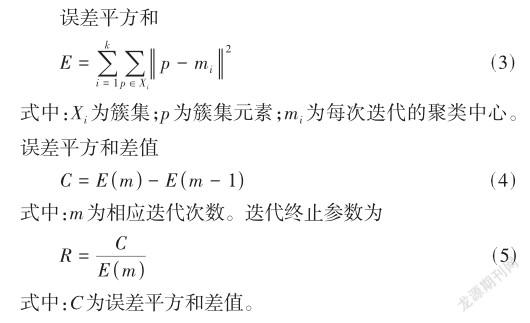
2.2基于像素點變化的優化
迭代終止條件還可以從前后兩次迭代過程輸出的像素點數目變化入手,設置迭代的終止條件為:前后兩次迭代像素點變化值小于某一值時即輸出圖像。這樣既能保證輸出圖像的效果,又能減少迭代次數,減少運算時間。
像素點變化值為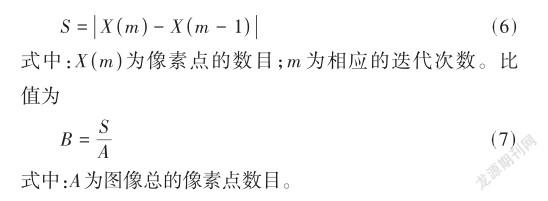
2.3 K均值聚類改進算法流程
K均值聚類改進算法流程圖如圖1所示。具體流程為:(1)初始化簇集,確定要聚類的數據;(2)確定聚類中心數目,隨機選取初始化聚類中心;(3)使用式(1)計算數據與聚類中心的距離,按照數據與聚類中心較近原則分配到相應的簇中;(4)使用式(2)計算各簇集中的數據與聚類中心的誤差平方和;(5)求出各個簇集中數據的平均值作為新的聚類中心;(6)判斷是否達到規定最大迭代次數或者聚類中心不再改變,如果不改變完成計算過程,輸出迭代次數。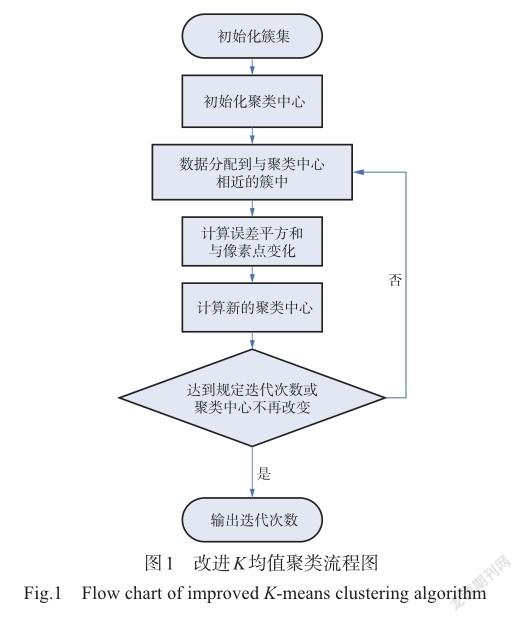
3基于改進K均值聚類的機體損傷識別方法驗證
為驗證基于改進K均值聚類的機體損傷識別方法,選取螺釘銹蝕、蒙皮銹蝕、小孔銹蝕、涂層剝落損傷、絲狀銹蝕和應力銹蝕裂紋等損傷圖像為實例,如圖2所示。
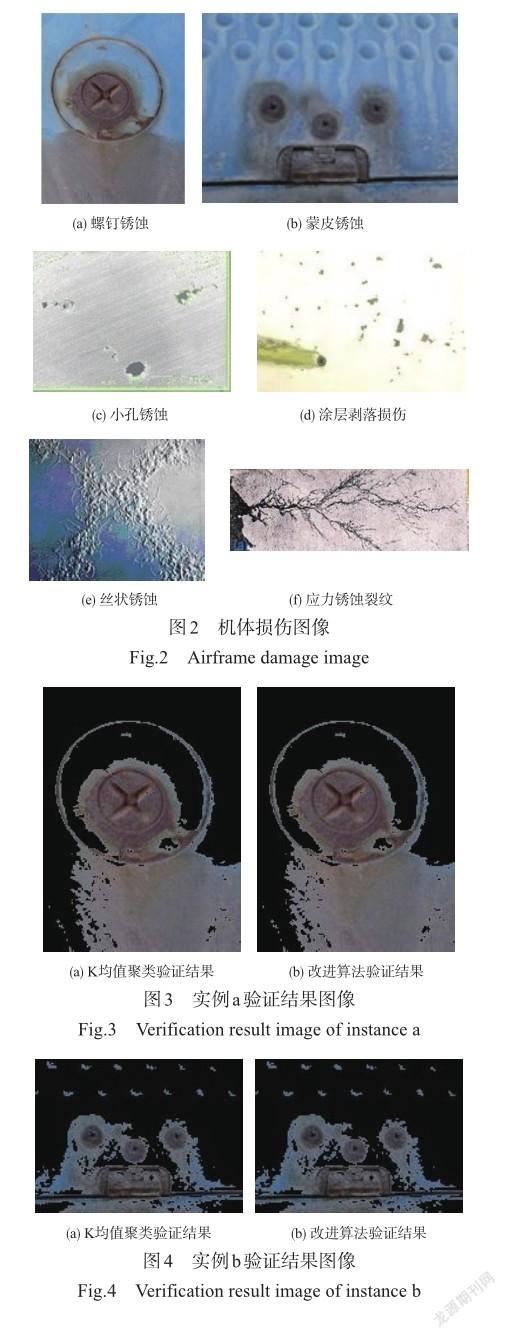
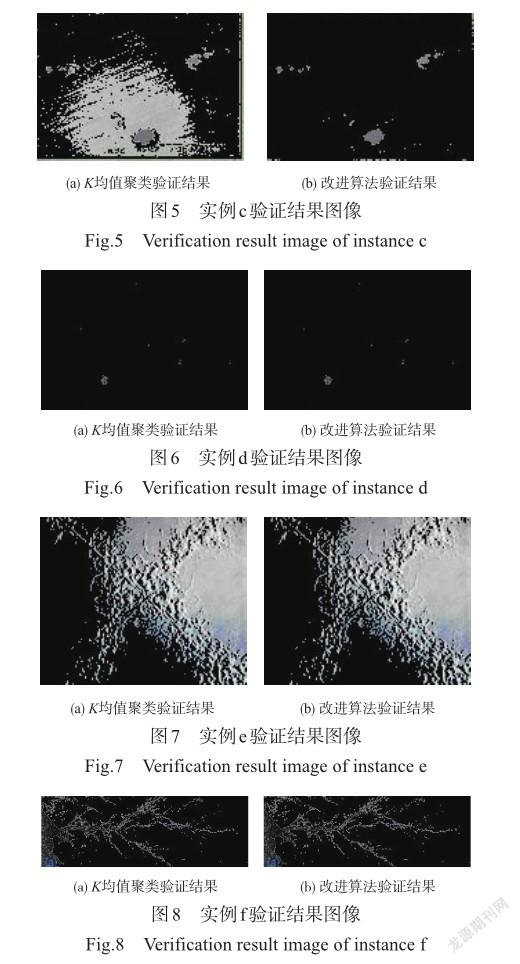
針對損傷圖像實例,分別使用K均值聚類算法和改進算法進行對比驗證,驗證結果圖像如圖3~圖8所示,實例a和實例b驗證計算過程見表1。
損傷識別效果方面,由圖3~圖8的驗證結果圖像可以看出,K均值聚類算法的驗證結果圖像與改進K均值聚類算法的驗證結果圖像相比,視覺區分度較小。對于整體色度單一的實例c,改進K均值聚類算法獲得的驗證結果圖像中,損傷區域清晰可辨識,與傳統K均值聚類算法的驗證結果圖像相比,損傷識別效果更優。因此,從損傷識別效果方面來說,改進K均值聚類算法對于損傷識別領域的應用效果較好。3B86AB7F-2AE9-42A2-8552-9231C4FC578D
在運算效率方面,由表1、表2的驗證計算過程數據可以看出,隨著迭代次數的增多,誤差平方和差值減小,輸出圖片損傷區域的像素點逐漸增多。當迭代符合終止條件時,誤差平方和比值接近0.001,像素點數目幾乎不變,輸出的圖像面積不再變化,迭代運算結束。聚類迭代運算可通過誤差平方和以及像素點數目的變化率動態優化迭代次數,達到最優迭代次數,不需人工設定迭代次數。在保證損傷區域辨識效果的基礎上,減少運算復雜度,提升計算效率。
4結論
本文通過分析不同迭代數目輸出圖像的區別,發現原算法存在不足,隨著迭代次數的增多,圖像效果并不是越來越清晰,所以對原始K均值聚類算法進行改進設計,原始算法的迭代終止條件是聚類中心不變或者達到最大迭代次數,由于初始聚類中心的隨機選取對結果影響很大,所以在保證初始聚類中心不變的情況下,改進算法的迭代終止條件,一種改進方法是根據誤差平方和差值進行改進,另一種方法是根據像素點變化的數目來進行改進。結果證明,改進算法在保證輸出圖像效果的同時,減少了迭代計算次數,提高了執行效率。
參考文獻
[1]李彬.具有全局優化能力的K均值聚類算法[J].西南師范大學學報(自然科學版),2014,39(7):36-40. Li Bin. On K-means clustering algorithm with global optimization ability[J]. Journal of Southwest China Normal University(Natural Science Edition),2014,39(7):36-40.(in Chinese)
[2]周宏元,張廣才,王小娟,等.基于互相關函數的聚類蝴蝶優化算法的結構損傷識別[J].振動與沖擊,2021,40(17):189-196. Zhou Hongyuan, Zhang Guangcai, Wang Xiaojuan, et al. Structural damage identification based on clustering butterfly optimization algorithm of cross-correlation function[J]. Journal of Vibration and Shock, 2021,40(17): 189-196.(in Chinese)
[3]趙楊超,李艷軍,曹愈遠,等.基于K-means聚類的航空復合材料敲擊檢測研究[J].航空科學技術,2019,30(10):45-49. Zhao Yangchao,Li Yanjun,Cao Yuyuan, et al. Study on percussion detection of aerospace composite materials based on K-means clustering[J]. Aeronautical Science & Technology, 2019,30(10):45-49.(in Chinese)
[4]劉立坤,閆軻.隨機子空間顫振模態參數自動辨識方法研究[J].航空科學技術,2020,31(3):53-58. Liu Likun, Yan Ke. Research on automated stochastic subspace flutter modal identification method[J]. Aeronautical Science & Technology, 2020,31(3):53-58.(in Chinese)
[5]賁志偉,趙勛杰.基于改進的K均值聚類算法提取彩色圖像有意義區域[J].計算機應用與軟件,2010,27(9):11-13. Ben Zhiwei, Zhao Xunjie. Extracting meaningful region in colour image based on improved K-means clustering algorithm[J]. Com‐puterApplication and Software,2010,27(9):11-13.(in Chinese)
[6]邢博邯,蔡建,周智權,等.航空結構中Lamb波小損傷監測能力研究[J].航空科學技術,2021,32(3):40-48. Xing Bohan, Cai Jian, Zhou Zhiquan, et al. Research on smalldamage monitoring abilities of Lamb waves in aircraft struc‐tures[J]. Aeronautical Science & Technology, 2021, 32(3):40-48.(in Chinese)
[7]李忠良,魏麟,劉曄璐,等.飛機外表面地檢設備圖像處理技術初探[J].航空維修與工程,2018(5):56-58. Li Zhongliang, Wei Lin, Liu Yelu, et al. Preliminary study on image processing technology of ground inspection equipment for aircraft[J].Aviation Maintenance and Engineering,2018(5):56-58.(in Chinese)3B86AB7F-2AE9-42A2-8552-9231C4FC578D
[8]丁明月,莊曉東.基于數據融合的K均值聚類彩色圖像分割方法[J].青島大學學報(工程技術版),2018,33(2):42-46,58. Ding Mingyue, Zhuang Xiaodong. K-means clustering color image segmentation method based on data fusion[J]. Journal of Qingdao University (Engineering and Technology), 2018, 33(2): 42-46,58.(in Chinese)
[9]Park H S,Jun C H. A simple and fast algorithm for K-means clustering[J]. Expert Systems with Applications,2009,36(2):3336-3341.
[10]劉玉潔.改進的K均值聚類算法彩色圖像分割的研究[J].工業控制計算機,2012,25(4):76-77. Liu Yujie. Color image segmentation based on an improved Kmeans clustering algorithm[J]. Industrial Control Computer, 2012,25(4):76-77.(in Chinese)
[11]裴晨,徐國彬,于藝銘,等.基于改進K均值聚類的圖像修復方法[J].包裝工程,2020,41(23): 255-262. Pei Chen, Xu Guobin, Yu Yiming, et al. Image restoration method based on improved K-means clustering[J]. Packaging Engineering,2020,41(23): 255-262.(in Chinese)
[12]謝娟英,蔣帥,王春霞,等.一種改進的全局K-均值聚類算法[J].陜西師范大學學報(自然科學版),2010,38(2):18-22. Xie Juanying, Jiang Shuai, Wang Chunxia, et al. An improved global K-means clustering algorithm[J]. Journal of Shanxi Normal University (Natural Science Edition),2010, 38(2):18-22.(in Chinese)
Research on Airframe Damage Identification Method Based on Improved Clustering
Fan Jie,Si Weisen,Ba Xiang
China Southern Airlines Henan Branch,Zhengzhou 450000,China
Abstract: In order to identify the airframe damage region clearly and quickly, the K-means clustering algorithm is introduced to process the damage image. By analyzing the limitations of the K-means clustering algorithm, an improved method of clustering iteration termination condition based on error square sum difference and pixel change is proposed. Through the verification of aircraft body damage images, it is verified from two aspects: damage recognition effect and operation efficiency. The verification results show that the airframe damage identification method based on improved clustering not only ensures the identification effect of image damage regions, but also significantly reduces the number of iterations, improves the operation efficiency of the clustering algorithm, and can meet the requirements of efficient processing of airframe damage identification.
Key Words: damage region division; image recognition; K-means clustering algorithm3B86AB7F-2AE9-42A2-8552-9231C4FC578D