防跌倒步態平衡訓練機器人發展現狀
2022-07-04 03:09:50陳殿生申振陽尹虎
包裝工程 2022年12期
關鍵詞:系統
陳殿生,申振陽,尹虎
防跌倒步態平衡訓練機器人發展現狀
陳殿生,申振陽,尹虎
(北京航空航天大學,北京 100191)
介紹國內外防跌倒步態平衡訓練機器人研究的主要進展,為防跌倒步態平衡訓練機器人等醫工結合領域的研究提供可借鑒的思路。主要從4個方面總結了下肢輔助康復機器人研究的最新進展,具體包括機器人構型,機構控制策略和算法,步態數據采集方法和步態數據分析方法。在國內外對步態平衡訓練機器人的研究中,機器人的市場定位細分是當前學界面臨的挑戰。各主流解決方案側重點都不相同,針對用戶細分的方法也不一樣。由于主要的目標人群老年人群體用戶差異性強,因此用戶的個性化訓練需求較高,未來需要進一步細化步態平衡訓練機器人的定位,滿足不同情況下不同用戶在不同階段的個性化訓練需求,有望提升步態平衡訓練機器人的整體水平。
步態平衡訓練;步態數據;康復機器人;平衡能力評估
步行作為人體最常見也最為關鍵的日常活動之一,與人們的生活息息相關。步行是由神經系統控制,全身肌肉、骨骼和關節協同作用的一種復雜生理活動。任何一個環節出現問題,將導致步行能力下降,其中老年人的步行能力下降最為迅速。
隨著時間推移,中國的社會人口老齡化問題顯得愈發嚴重。據《中國統計年鑒–2019》[1]數據顯示,預計到2050年,我國60以上老人人口比例將高達30%~40%。老年人群體因為身體機能的退化,其肌肉力量、平衡能力和肢體協調能力都會顯著下降,從而發生跌倒等事故。我國65歲及以上老年人跌倒死亡率為58.03/10萬,跌倒導致的死亡占該年齡段人群全部傷害致死原因的34.83%,已成老年人因傷致死的首位原因[2]。在我國跌倒的發生率為14%~34%,每年至少有2 000萬老人發生2 500萬次跌倒事故[3]。老年人發生跌倒,后果非常嚴重,比如骨折、長期疼痛、顱腦外傷、殘疾、失能,甚至死亡。因此,在人口老齡化的背景下,改善老年人的平衡能力,是預防老年人跌倒的有效手段,對減少老年人意外傷害具有重要意義。
平衡能力作為判斷老年人步態穩定性最為重要的一個評價指標,受到國內外相關研究者和企業的廣泛關注。平衡調節是人類活動的基礎,以深感覺為主、前庭覺和視覺等為輔的平衡感知信息傳給大腦中樞處理,形成平衡調節策略和運動指令,進而激活相應的人體運動單元執行平衡調節動作。平衡能力的缺失,將導致步行能力的快速下降,嚴重影響人們的生活。人體平衡能力分為靜態平衡和動態平衡兩類。靜態平衡指人體保持某一特定位姿,如站立和坐的能力。動態平衡是指運動過程中,人體控制身體重心并調節身體姿態的能力。動態平衡又分為2個方面:自動態平衡,即主動性平衡,是人體在進行各種自主運動時能重新獲得穩定狀態的能力;他動態平衡,即反應性平衡,是人體在受到外界干擾后恢復穩定狀態的能力[4-5]。
步態,即人體走路時的姿態動作。步態,除了與平衡能力有關,還與肢體協調、肌力、神經控制等因素相關。老年人隨著年齡增長,身體機能下降,特別是腦卒中(又稱中風)、帕金森等常見老年疾病,容易引起步態異常。傳統的步態訓練,通過醫生觀察指出患者缺陷,并進行相應的指導,容易忽略個體差異,且容易受到醫生個人經驗的影響。基于機器人的步態訓練,從簡單的減重式步行跑臺,到外骨骼姿態矯形,核心是異常步態分析與步態矯形[6]。
當前的平衡能力評估與訓練和步態訓練與矯正仍然面臨巨大問題與挑戰。其成因復雜,包括感覺輸入異常、中樞整合與協調性障礙、運動控制能力下降等多個維度,從而難以建立多因素的、量化的平衡障礙評價標準。以腦卒中患者為例,在步態平衡訓練上,目前主要以康復醫師“一對一”針對治療與訓練為主。建立完善的平衡能力評估體系,加快建設平衡能力與步態訓練機器人的研制,對于應對我國人口老齡化趨勢,改善人民生活品質具有重要意義。
1 機器人構型
在老年人防跌倒方面,步態訓練和平衡訓練作為2個重要的組成部分,各有側重又相互關聯。在防跌倒步態平衡康復訓練上,針對平衡能力的3個關鍵輸入部分(視覺、前庭覺和深感覺)針對性地進行訓練,從而恢復患者在感覺輸入上的異常[7]。不同的機器構型的側重點各有不同。目前,主流的平衡訓練機器人有3種構型:下肢外骨骼式步行平衡訓練機器人、踏板式平衡訓練機器人和并聯多自由度平臺平衡訓練機器人。下肢外骨骼式步態平衡訓練機器人基于肢體訓練,提前規劃好外骨骼的運動路徑和控制策略,通過帶動下肢不斷重復正確的步態動作,實現神經的重塑,從而促使患者恢復步行和平衡能力,其側重點在于步態訓練。踏板式平衡訓練機器人大多配合虛擬現實技術,通過踏板的運動帶動肢體模擬步行動作,同時將踏板運動與虛擬的運動場景結合,以實現常見的運動場景(如平地、樓梯、山路和沙灘等)的模擬,對步態平衡訓練有良好的積極作用。并聯多自由度平衡訓練機器人由早期的模擬駕駛系統演變而來,結合體感仿真技術,可以給予使用者常見的運動刺激,從而促使患者采取對應的措施,主要針對前庭覺進行平衡訓練,如果輔以跑步帶,可以實現步態訓練。
1.1 外骨骼式
外骨骼式下肢機器人在下肢助力上的應用頗多,由于其能控制下肢的運動形式,因此具有步態矯正功能,也應用于步態平衡訓練。針對外骨骼步態平衡訓練機器人的研究眾多。
瑞士蘇黎世聯邦理工學院與Hocoma公司合作研制了一款下肢外骨骼康復訓練機器人Locomat,見圖1a。該機器人由步態矯形器、減重系統、跑步平臺和人機交互軟件組成。步態矯形器有髖關節和膝關節等2個自由度,由帶滾珠絲杠的驅動機構實現獨立驅動,從而實現患者矢狀面的運動。踝關節的背屈運動由彈性元件被動實現,然后通過平行四桿機構實現了骨盆的橫向和旋轉運動。此外,每個關節配有位置傳感器和力傳感器可以測量關節旋轉角度和力矩,使外骨骼的運動更好地與人體正常步行運動匹配。Locomat采用步態自適應控制、生物視覺反饋等控制策略,實現患者在虛擬環境中的康復訓練,并通過實驗驗證了控制策略的有效性[8-9]。目前,該產品已經商業化,并成功推出了兒童訓練款。

圖1 外骨骼式步態康復訓練機器人
瑞士洛桑聯邦理工學院聯合Swortec公司開發了一款下肢外骨骼訓練康復機器人Walk Trainer,見圖1b。該機器人由移動車體、減重系統、骨盆控制系統和下肢運動系統組成。移動車體可以跟隨人體運動而運動,不需要使用跑臺。減重系統由2個電機控制,一個電機控制預緊彈簧;另一個電機以編碼器和力傳感器作為反饋信號,精確控制減重力的恒定。骨盆控制系統為六自由度機構,可以實現任意位置和角度的運動控制。下肢運動系統則為典型的外骨骼結構,由3個直線驅動器驅動實現下肢運動。
美國HealthSouth公司推出了一款名為Reo Ambulator的步行訓練機器人,見圖1c。該機器人由兩條二自由度機械腿構成,分別綁在患者腳踝和大腿處。通過獨立的控制系統帶動大腿和小腿完成一系列的步態訓練和矯正動作,并實現實時監控、在線測評等功能,主要用于神經和骨科的適應性康復訓練。目前該產品已經得到廣泛實驗和應用。
日本芝浦工業大學研制了助行機器人Walking Assistance Apparatus,見圖2a。該機器人主要由移動支架、減重機構和外骨骼3個部分組成。移動支架跟隨患者運動,代替跑臺的作用。減重機構固定于支架上,并與外骨骼機械腿連接,兩者協調實現減重步行訓練。外骨骼機械腿基于平行連桿機構原理,驅動髖關節和膝關節在矢狀面內轉動,通過柔性連桿實現髖關節和踝關節的自然轉動。該機器人還集成了陀螺儀和超聲波傳感器,從而幫助患者實現斜坡和臺階的檢測和運動[10]。基于之前的研究,芝浦工業大學的學者又進一步研發了能更精確地控制外骨骼軌跡的Air Gait,見圖2b。Air Gait用跑步機替代了移動支架,利用氣動肌肉帶動連桿機構驅動下肢髖膝踝關節實現矢狀面的轉動,并提出了基于氣動肌肉壓力和位置控制的步行訓練控制策略,從而更好地實現步態康復訓練[11-12]。

圖2 日本芝浦工業大學研制的外骨骼康復機器人
1.2 踏板式
德國的Stefan Hesse是最早研究踏板式步行訓練機器人的學者之一,并成功開發了Gait Trainer第一代樣機,見圖3a。該樣機通過曲柄連桿機構,用單自由度模擬人體步行時足的軌跡,利用踏板帶動患者沿著既定軌跡運動,以模仿人體正常步行,單自由度的既定軌跡使機構結構簡單,但功能單一[13],無法滿足人體步行和平衡控制時踝關節的調整策略,而在人體矢狀面上兩個方向的平移運動存在耦合現象,無法實現正常的步態訓練。隨后,Stefan Hesse又研制了一款串并聯混合驅動的六自由度的踏板步態訓練機器人Haptic Walker,見圖3b。該機器人每個踏板可以實現人體在矢狀面上2個方向的移動,踏板還有一個旋轉自由度以實現踝關節的轉動。該機器人可以模擬上下樓梯、平地行走和滑雪等多種運動場景,同時踏板上安裝有位置傳感器和力傳感器,實時采集運動信息,既能幫助醫師對患者的平衡狀況進行評估,又能更好地規劃并控制踏板運動[14]。之后,通過與荷蘭Reha Technology公司合作,推出了最終產品G–EO System,見圖3c[15]。主體結構和核心功能都與Haptic Walker相同,可以根據患者狀況制定運動軌跡,實現針對式康復訓練。
日本筑波大學在踏板式步態平衡訓練機器人方面做了很多相關研究。2003年,他們研制出了GaitMaster1和GaitMaster 2。GaitMaster1由2個三自由度的踏板組成,可以實現人體的大部分運動。之后他們又經過改進,陸續推出了GaitMaster 3—Gaitmaster 5,同時加入了虛擬現實等先進的技術,讓患者實現沉浸式康復訓練,能夠實現平地、上下樓梯等日常場景的模擬。該系統已經完成實驗驗證,見圖4[16]。
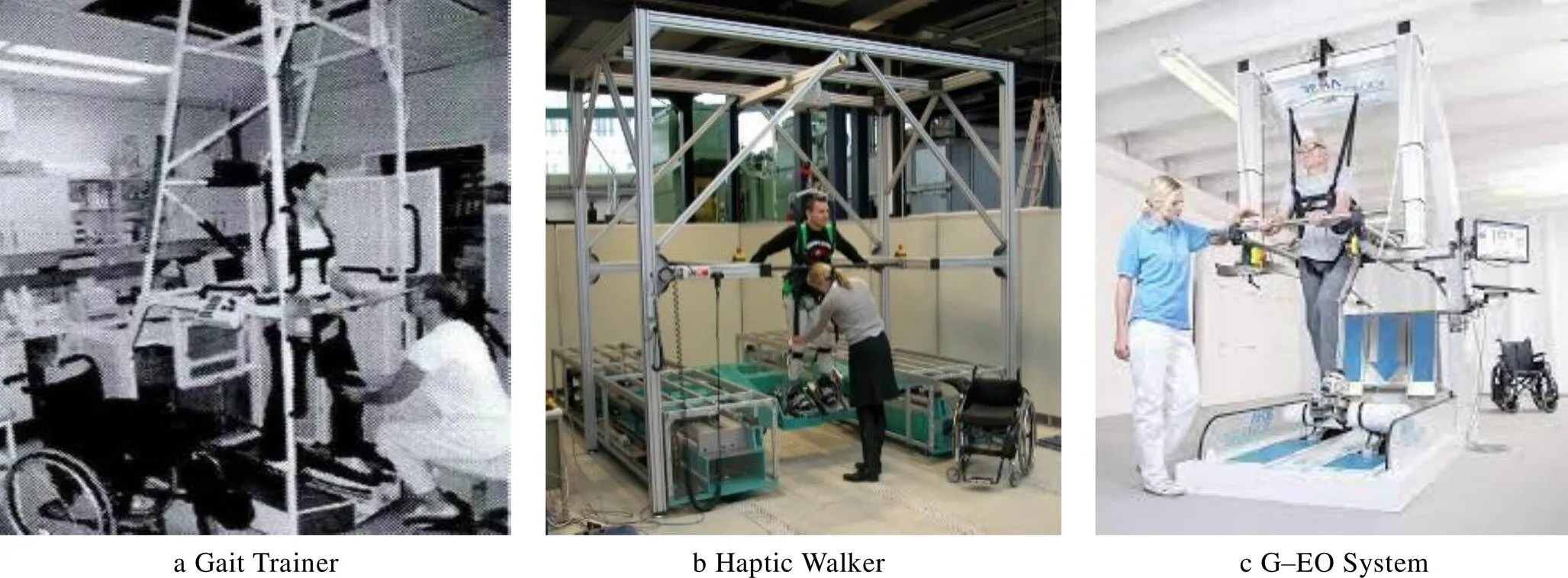
圖3 德國踏板式步行訓練機器人

圖4 Gaitmaster訓練機器人
1.3 多自由度并聯平臺系統
以Stewart 6自由度并聯機構為代表的多自由度并聯系統,由于其剛度大、承載能力強,而且可以實現運動行程內空間任意位置和姿態的運動,而受到廣泛運用。早期的Stewart并聯機構主要用于模擬駕駛、體感游戲等設備中,還用于模擬人體前庭覺的仿真輸入,并得到業界一致認可。由于這種系統契合人體步態和平衡訓練的多自由度模擬、多感覺輸入的要求,近年來開始逐漸用于平衡訓練機器人的研究中[17]。
Motek Medical公司開發的Computer Assisted Rehabilitation Environment(CAREN)平衡康復訓練系統,見圖5a,集合了六自由度運動平臺,雙跑步帶自適應跑臺,虛擬現實系統及三維運動捕捉系統于一體,可以實現運動數據采集與分析、平衡評估、步態訓練等康復訓練流程,是當前國際上最先進的系統康復訓練設備之一。六自由度并聯平臺和雙帶自適應跑臺,可以實現很多需要的運動組合,見圖5b。結合其強大的視覺運動捕捉系統和信號采集系統,可以捕捉人體肌電信號,各關節運動速度和加速度,步長、步寬、步速和足底壓力等常見的平衡和步態評估參數,實現豐富的評估方案和訓練方案。同時,虛擬現實技術也給評估和訓練過程增加了沉浸性和趣味性[18]。
美國NeuroCom公司研發了EquiTest平衡訓練儀。該設備的站立平臺既能固定,又能實現平移、旋轉等多種運動模式,并且提供視覺虛擬反饋,幫助患者實現視覺與平衡訓練[19]。
哈爾濱工程大學基于3–RPS并聯平臺研制了一款平衡訓練機器人仿真系統,見圖6。該系統利用并聯平臺的多自由度特性,可以實現小范圍的移動與傾斜[20]。配置上位機實時顯示姿態曲線。該樣機只是小型仿真系統,并未用于實際平衡訓練。

圖5 CAREN康復訓練系統

圖6 哈爾濱工程大學研制的平衡訓練仿真平臺系統
2 機器人控制策略與方法
步態平衡訓練機器人作為直接與用戶發生接觸的部分,自然、高效、安全的人機交互是非常重要的需求之一。考慮到老年人用戶群體的特殊性,對人機交互和“人–機–環境”要求更高,這就涉及機器人的控制策略和方法,而用戶是具有自主運動意識和能力的,因此文中介紹了目前主流的步態平衡訓練機器人控制策略與方法。
目前,專業領域內對機器人控制技術的定義有很多解釋,此前被廣泛接受的解釋是“機器人控制技術是作用于機器人各關節使機器人運動的技術”,涉及機器人的機械結構和控制程序2個部分。事實上,如果在更廣泛的角度下定義的話,機器人的控制系統還包括設計、建模、識別、軌跡規劃和學習[21]。通過建模、識別、軌跡規劃和基于模型的控制方法,可以有效地提升機器人的性能,并且能夠降低機器人的成本,目前工業機器人、服務機器人乃至協作機器人等都廣泛采用此方法。
對康復機器人而言,目前已經有許多研究介紹了下肢康復或下肢增強訓練機器人的控制方法。胡進等[22]按照獲取用戶主動運動意圖時所使用的信號進行分類,具體包括基于力信號的控制方法和基于生物醫學信號的控制方法。許彧青[23]按照人機交互模式進行分類,具體包括基于人體測量信號的控制策略、基于交互力測量的控制策略和基于機器人測量信號的控制策略。張晟杰[21]從控制技術本身出發進行分類,具體包括預定義軌跡控制、按需輔助控制、虛擬通道控制、基于步態的預定義動作控制、基于模型控制、基于自適應振蕩器的控制和模糊控制,同時總結了幾種控制方法適用的用戶群體,見表1。
表1 7種控制方法適用的用戶群體[23]

Tab.1 User groups corresponding to seven control methods
宏觀上說,機器人的控制方法按照任務不同可以分為運動學控制和動力學控制兩大類,再按照機構運動的自由程度劃分為定點控制、軌跡控制和力/位混合控制等。傳統應用于步態平衡訓練機器人的控制方法主要有阻抗控制、力/位混合控制、自適應控制等。目前也有大量的研究[24-26]證明了其有效性,這幾種方法也是目前主流的方法。
自適應控制方法是當下研究的熱點,近年來的機器學習研究產生了大量的自適應控制算法,然而大多數的標準機器學習方法不能直接應用于此類機器人。有學者提出了應用神經網絡學習的控制方法,為自適應控制方法找到了新的方向。
對工業機器人而言,重點目標在于按照規劃好的路線完成既定的任務,要求高穩定性、高精度、高力矩和長時間工作;對于步態平衡訓練之類的服務機器人而言,重點目標是在開放的非預設環境下完成輕量的、非高精度的工作,從而滿足用戶的需求,要求安全性高、穩定性好、易交互和易維護。兩者的側重點不一樣,適用的控制策略和方法也不盡相同。
從需求角度出發,康復訓練或增強訓練機器人都屬于服務機器人。此類機器人對人機交互或者說“人機共融”的需求很高。研究表明,長時間的重復訓練會導致訓練枯燥,用戶將無法集中注意力,從而導致訓練的效果降低。在訓練的過程中,用戶的積極參與對訓練的效果起著重要作用。為了提高用戶的主動性,需要全面提高訓練過程中的用戶體驗,而構成訓練過程中用戶體驗最核心的部分就是用戶與機器人之間的交互,而在交互設計領域,大部分學者認為交互的最理想狀態就是“零交互”,也就是要盡量減少用戶和機器人之間的交互行為,以目前的技術還達不到理想的狀態。在實際的交互設計中,學者們致力于尋求最為自然且高效的交互方式,包括但不限于人的意識、聽覺、視覺、語音、嗅覺和觸覺等方面。
對于現階段的步態平衡訓練機器人研究,最關鍵的部分在于判斷用戶的主動運動意圖和獲取運動狀態等生物信號,因此基于生物信號的控制方法對此類機器人來說,具有特別的優勢。目前基于生物信號的控制方法主要有以下2種:是基于肌電信號(sEMG)的控制;基于腦電信號(EEG)的控制。由于現階段對腦電信號的采集技術還不成熟,因此,還未得到較為廣泛的應用,目前大部分采用生物信號控制的步態平衡訓練機器人主要使用肌電信號控制[27]。未來,基于生物信號的智能控制方法和多種控制方法的融合是該領域研究的趨勢。
3 數據采集方法
對人體平衡評估和平衡訓練效果的評價,都需要對實驗對象進行數據采集。隨著傳感器和微型處理器的發展,數據采集的方式越來越多。主流的數據采集方式包括:基于壓力傳感器的人體重心估計與計算;基于計算機視覺的mark點定位與姿態重構;基于慣性傳感器的人體骨架重構[28]。
3.1 壓力傳感器數據采集
在人體運動學和動力學分析中,重心是衡量人體運動平衡最重要的指標。傳統的人體建模方法可以把人視為一個倒立擺模型,見圖7。為了測量重心(Center of Mass,CoM)位置,假定人對平臺的壓力(Center of Pressure,CoP)和平臺對人的反作用力位于同一豎直線上(適用于靜態平衡)。因此利用分布式壓力傳感器平臺測出壓力中心CoP就能得到人體重心在水平面的投影[29]。
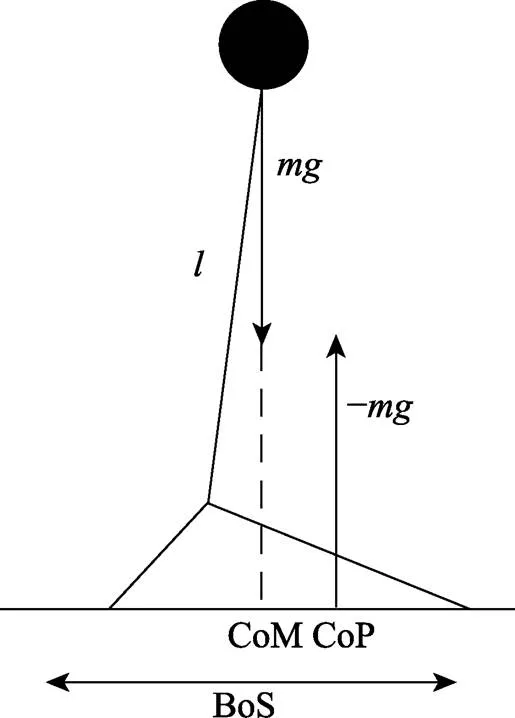
圖7 人體倒立擺模型
20世紀70年代,美國的Nashner研發出用于測定人體平衡能力的動態姿勢圖技術(Computerized Dynamic Posturography,CDP)[30],成為量化評價人體平衡能力的里程碑,并據此研發出EquiTest平衡檢測儀,見圖8a。1986年,EquiTest獲得美國FDA批準后,其后續產品(Balance Manager系列)成為了美國人體平衡功能評定、臨床治療和科研方面的標準化設備。EquiTest用壓力中心COP反應人體重心軌跡,并通過計算機和軟件記錄重心在一段時間內的軌跡,見圖8b。繪制的軌跡包絡線越集中,重心波動范圍越小,證明實驗對象的平衡性越好。類似的平衡測試設備還有英國的BPM平衡儀(Balance Performance Monitor)[31]、以色列Tetrax平衡儀[32]、Balance Master平衡儀等。通過繪制重心擺動軌跡對平衡能力進行評估已經成為了評價人體平衡能力的重要方法之一。

圖8 EquiTest平衡測試儀與重心軌跡
3.2 慣性傳感器數據采集
慣性傳感器主要是用陀螺儀和加速度計來捕捉運動。此種傳感器可以采集三軸角度、角速度和加速度共9個參量。優點是:體積小、攜帶方便,能很好地采集人體姿態信息。整個測量系統由多個測量點構成,每個測量點用一個慣性傳感器測量,對應著人體一個關節自由度。該方法的問題在于陀螺儀芯片存在零誤差和積分誤差,長時間使用會造成偏差增大,而且信號容易受高頻噪聲的影響。
基于傳感器的人體數據采集與平衡評估和訓練實際上是利用慣性傳感器對人體姿態進行測量并重建。近年來,隨著慣性傳感器的人體姿態重建和運動捕捉系統快速發展,出現了許多穿戴式的運動捕捉方案。其中Xsens MVN運動捕捉系統最具代表性,見圖9。Xsens MVN運動捕捉系統采用陀螺儀、加速度計和磁力計來捕捉運動。整個采集系統由微型慣性傳感器MTx模塊、無線Xbus傳輸模塊和軟件分析模塊組成,不受環境光線與空間距離的限制,錄制的動作無需后續處理即可使用,解決了雙腳同時離地、跳躍等特殊運動模式下的數據漂移問題,可以廣泛應用于醫療,表演等場合[33]。

圖9 Xsens MVN運動捕捉系統
國內的諾亦騰科技有限公司開發的Perception Neuron運動捕捉系統,見圖10。單個傳感器直徑比1角硬幣還小,集成了加速度計、陀螺儀以及磁力計。節點配置可以從3個節點到32個節點,可以對應捕捉單純的手臂運動到全身的精細運動。目前已經在電影制作、體育運動、醫療等多個領域得到應用[34]。

圖10 諾亦騰運動捕捉設備
孚心科技也研發了用于人體姿態重構的慣性傳感器模塊,見圖11。該公司主要有2套產品,核心功能相同:一套有線設備,通過隨身攜帶在背部的Hub搜集傳感器的數據信息,并導入電腦進行處理;另一套為無線設備,通過藍牙連接到上位機,實時傳輸數據到上位機設備。結合其公司開發的配套軟件,可以實現實時人體姿態重構。

圖11 孚心科技慣性傳感系統
基于慣性傳感器的運動分析、步態測量、平衡評估實驗和研究眾多。Hobert等[35]利用可穿戴式慣性傳感器對帕金森患者的步態進行了分析研究,證明了慣性傳感器對人體數據分析的有效性。Horak對19名無跌倒史的老年人和16名近年來超過1次跌倒史的老年人通過可穿戴設備對指定動作任務進行監測,包括轉身90°、180°和行走3 m,結果顯示,有跌倒史和無跌倒史的老年人行走3 m時間無差異,但轉身的特征存在顯著差異[36]。唐增等[37]通過測力板和慣性傳感器分別采集了青年人和老年人2組運動數據,采用系統聚類方法對數據進行分析,以研究人體的平衡能力。岳宗曉等[38]利用慣性傳感器,設計了一系列平衡實驗,通過實驗中慣性傳感器的數據分析,來評估并訓練人體平衡能力。
雖然基于慣性傳感器的步態數據采集具有數據容易漂移和穿戴方式不固定導致數據有噪聲的缺點,但其成本低、部署方便,且能夠滿足采集步態信息的有效性和可靠性要求,因此得到大量應用。
3.3 視覺數據采集系統
視覺運動捕捉作為近年來的研究熱點,受到國內外學者和公司的廣泛關注。
微軟公司于2010年推出了一款深度相機Kinect V1,見圖12a。極大降低了深度相機的入門門檻,為利用視覺對人體骨架建模、人體運動捕捉和人機交互提供了極大便利。該相機的視覺感知部分由一個RGB攝像頭,一個紅外發射器,一個紅外接收器組成,并集成了相關算法,可以實時輸出深度圖像。2014年微軟又推出Kinect V2,在游戲、醫療、科研等領域廣泛應用。

圖12 運動捕捉系統
Kinect作為低成本運動捕捉設備,其精度在很多場景下達不到要求。基于Marker點的高精度運動捕捉系統彌補了這部分缺陷。英國Oxford Metrics Limited公司推出的Vicon光學運動捕捉系統就是其中的代表,見圖12b。Vicon系統主要由bonita相機、Marker點和配套處理軟件構成。通過光學攝像頭發射紅外光線,照射到覆蓋有特殊涂層的Marker點產生反射,由高速光學攝像頭捕捉圖像,傳輸給軟件處理,從而得到marker點在當前空間環境中的六自由度位置。
基于以上系統,眾多學者和公司進行了大量人體平衡評估和平衡訓練的相關研究。Lai等[39]利用kinect設計了一套虛擬交互系統用于訓練中風患者的平衡能力,見圖13a,該系統類似于體感游戲,通過將一些平衡動作轉化為游戲中的動作,并用Kinect進行交互,以實現平衡訓練目的。Junata等[40]設計了一款結合Kinect的平衡訓練平臺,見圖13b,利用最大運動范圍和最快反應時間作為平衡指標,并對17名中風患者進行了實驗測試,結果顯示有效。

圖13 基于Kinect的平衡訓練系統
Caren平衡訓練系統搭載了vicon的運動捕捉系統,可以精確測量人體的運動情況。眾多學者基于此平臺進行了平衡評估與訓練的相關驗證。Roeles等[41]在Caren平衡訓練系統上分別測試了青年和老年2組人員在6種擾動模式下步態平衡的變化,目的是探究哪些類型的擾動對步態平衡的影響最大。Shani等[42]利用CAREN的運動捕捉系統分別測試了上坡、下坡和平地的一些常見步態參數,并說明了如何利用這些參數對人體運動能力進行評價。
與其他的數據采集方法相比,視覺數據采集系統的最大優勢在于其非接觸性,部署也較為便捷,而且隨著算法的更新迭代,其精度和可靠性都達到了較高的級別,能夠滿足采集步態數據的要求。
4 數據分析方法
由于平衡能力集合了神經控制、肌力能力和多感覺感知等一系列復雜的生理過程,對平衡能力的評價與平衡訓練數據分析的方法,缺乏統一而完善的理論體系。在此介紹國內外常用的平衡數據分析方法。
4.1 基于最大李雅普諾夫(Lyapunov)指數的數據分析
4.1.1 最大李雅普諾夫指數定義

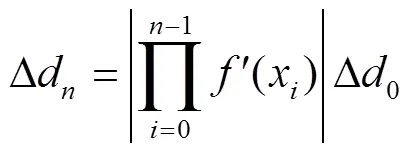
初始誤差:
經過一次迭代之后,誤差如下:

以此類推,經過次迭代之后,狀態偏差:
2個系統如果初始存在微小的差異,隨著時間(或迭代次數)逐漸分離,分離程度常用李雅普諾夫指數來度量。令式(1)為:
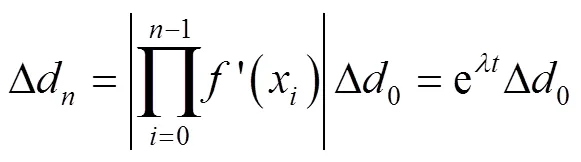
則
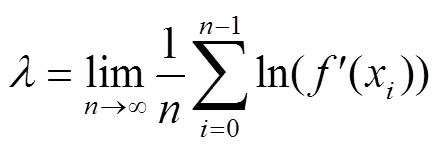

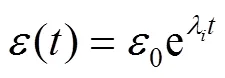
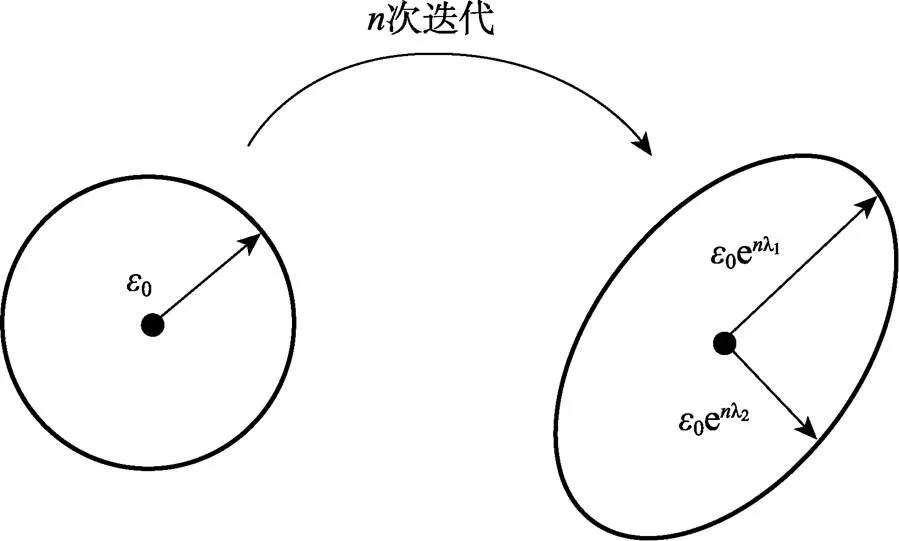
圖14 二維李雅普諾夫指數變化情況
穩定體系的相軌線相應于趨向某個平衡點,如果出現越來越遠離平衡點的情況,則系統是不穩定的。系統只要有一個正值就會出現混沌運動。
4.1.2 最大李雅普諾夫指數計算方法


……

4.1.3 基于最大李雅普諾夫指數的平衡能力評估
最大李雅普諾夫指數常與局部動態穩定性(Local Dynamic Stability,LDS)聯系到一起。作為LDS的主要衡量指標,最大李雅普諾夫指數在人體步態平衡和跌倒風險預測上被廣泛運用。Dingwell等[43]首次將最大李雅普諾夫指數用于研究人體步態穩定性。Marcel等[44]探究了跌倒歷史和風險與最大李雅普諾夫指數的關系,并證實最大李雅普諾夫指數與跌倒風險具有相關性。Bruijn[45-47]等首先探究了最大李雅普諾夫指數與人體平衡能力和步態參數的相關性,證明了這個方法對平衡分析的有效性。同時深入探究了不同嵌入維度、不同步行速度和不同長度時間序列對最大李雅普諾夫指數的影響。大量研究和實驗均證明了該方法的有效性。
4.2 生物力學模型分析
從直觀角度而言,人體平衡能力與重心有很大關系。基于此理論,計算出重心位置,并根據動力學方法判斷人體平衡能力,將是一種有效的研究方法。為此,應先對人體建模。
4.2.1 數學模型
目前,應用最廣泛的人體數學模型為倒立擺模型。倒立擺模型見圖7。該模型的最重要參數為重心,重心位置在水平面的投影可以根據壓力中心(Center of Pressure,CoP)的位置確定。
由于壓力中心CoP只能反應靜態平衡時重心的投影。在動態平衡中,經常用推測質心代替重心(Extrapolated Center of Mass,XCoM)。

4.2.2 基于生物力學的人體平衡研究

5 結語
現階段的防跌倒步態平衡訓練機器人,大多直接基于機器人技術。外骨骼式步態訓練機器人重點在于肌力訓練與神經控制,現階段的踏板式步行訓練機器人側重于步態的運動仿真,而以Caren系統為代表的多自由度并聯平臺則側重于平衡評估。平衡能力涉及的因素眾多,是一個復雜的調節過程。由于針對的主要目標用戶是老年人,由此用戶的個體差異性很強,不同病癥、不同階段、不同年齡、不同體質的用戶,他們的需求千差萬別,很難通過單一的步態平衡訓練系統滿足需求。
需要進一步細分步態平衡訓練機器人的定位,針對不同平衡能力的人群展開調研,有針對性地為解決某一類人群的需求進行方案設計,實現更為細分的步態平衡訓練機器人。例如將主要目標人群——老年人用戶劃分為腦卒中患者、肌無力患者、帕金森患者和阿爾茨海默病患者等,其中,腦卒中患者是平衡訓練機器人最主要的使用者,以腦卒中患者人群為例,可以按階段將其進一步劃分為恢復期和后遺癥期等。在不同的時期,其平衡能力差別也較大,而且對于腦卒中患者而言,無論是在恢復期還是后遺癥期間,絕大多數患者的雙腿運動都表現出很高的不對稱性和不協調性,在機器人的構型設計上選擇能實現單側腿/腳的康復訓練方案能夠取得更理想的訓練效果。進一步細分機器人的定位,能夠更有針對性地幫助不同的老年人群體進行步態平衡訓練,有望提升老年人群體的平衡訓練效果,同時能夠有效地提升用戶體驗,從而提高防跌倒步態平衡訓練機器人領域的研究水平。
[1] 國家統計局. 中國統計年鑒2019[EB/OL]. (2019-09- 01)[2021-05-23]. http://www.stats.gov.cn/tjsj/ndsj/2019/ indexch.htm, 2019-09-01.
National Bureau of Statistics. China Statistical Yearbook 2019[EB/OL]. (2019-09-01)[2021-05-23]. http://www. stats.gov.cn/tjsj/ndsj/2019/indexch.htm, 2019-09-01.
[2] 楊艷林, 張紅燕, 廖婷, 等. 我國老年人跌倒影響因素研究的可視化分析[J]. 上海護理, 2020, 20(4): 19-24.
YANG Yan-lin, ZHANG Hong-yan, LIAO Ting, et al. Visualization Analysis on Influencing Factors of Falls in Chinese Elderly[J]. Shanghai Nursing, 2020, 20(4): 19-24.
[3] PARK S H. Tools for Assessing Fall Risk in the Elderly: A Systematic Review and Meta-Analysis[J]. Aging Clinical and Experimental Research, 2018, 30(1): 1-16.
[4] 燕鐵斌, 竇祖林. 實用癱瘓康復[M]. 北京: 人民衛生出版社, 1999: 134-137.
YAN Tie-bin, DOU Zu-lin. Practical Rehabilitation of Paralysis[M]. Beijing: People's Medical Publishing House, 1999: 134-137.
[5] POLLOCK A S, DURWARD B R, ROWE P J, et al. What is Balance? [J]. Clinical Rehabilitation, 2000, 14(4): 402-406.
[6] PENNYCOTT A, WYSS D, VALLERY H, et al. Towards more Effective Robotic Gait Training for Stroke Rehabilitation: A Review[J]. Journal of Neuroengineering and Rehabilitation, 2012, 9(1): 65.
[7] RUNGE M, REHFELD G, RESNICEK E. Balance Training and Exercise in Geriatric Patients[J]. Journal of Musculoskeletal & Neuronal Interactions, 2000, 1(1): 61-65.
[8] RIENER R, LüNENBURGER L, MAIER I C, et al. Locomotor Training in Subjects with Sensori-Motor Deficits: An Overview of the Robotic Gait Orthosis Lokomat[J]. Journal of Healthcare Engineering, 2010, 1: 517674.
[9] Hocoma. Locomat[EB/OL]. (2021-11-08)[2021-01-22]. Http://www.hocoma.com/products/locomat.
[10] YUSA H, TANAKA E, IKEHARA T, et al. Development of a Walking Assistance Apparatus Using a Spatial Parallel Link Mechanism and Evaluation of Muscle Activity[C]// 19th International Symposium in Robot and Human Interactive Communication. Viareggio: IEEE, 2010: 151-158.
[11] SHIBATA Y, IMAI S, NOBUTOMO T, et al. Development of Body Weight Support Gait Training System Using Antagonistic Bi-articular Muscle Model[C]// 2010 Annual International Conference of the IEEE Engineering in Medicine and Biology. Buenos Aires: IEEE, 2010: 4468-4471.
[12] DZAHIR M A M, NOBUTOMO T, YAMAMOTO S I. Antagonistic Mono- and Bi-articular Pneumatic Muscle Actuator Control for Gait Training System Using Contraction Model[C]// 2013 ISSNIP Biosignals and Bioro-botics Conference: Biosignals and Robotics for Better and Safer Living (BRC). Rio de Janeiro: IEEE, 2013: 1-6.
[13] HESSE S, UHLENBROCK D. A Mechanized Gait Trainer for Restoration of Gait[J]. Journal of Rehabilitation Research and Development, 2000, 37(6): 701-708.
[14] SCHMIDT H, HESSE S, BERNHARDT R, et al. HapticWalker: A Novel Haptic Foot Device[J]. ACM Transactions on Applied Perception, 2005, 2(2): 166-180.
[15] ANDRENELLI E, CAPECCI M, DI BIAGIO L, et al. Improving Gait Function and Sensorimotor Brain Plasticity Through Robotic Gait Training with G-EO System in Parkinson's Disease[J]. Annals of Physical and Rehabilitation Medicine, 2018, 61(1): 79-80.
[16] TANAKA N, EBIHARA K, EBATA Y, et al. Effect of Gait Rehabilitation with a Footpad-Type Locomotion Interface on Gait Ability in Subacute Stroke Patients[J]. NeuroRehabilitation, 2022: 1-7.
[17] BO A P L, CASAS L, CUCHO-PADIN G, et al. Control Strategies for Gait Tele-Rehabilitation System Based on Parallel Robotics[J]. Applied Sciences, 2021, 11(23): 11095.
[18] KANE A, THOMPSON N R, SULLIVAN A B. Assessment of Computer Assisted Rehabilitation Environment (CAREN) System Use and Mood in Patients with Multiple Sclerosis[J]. International Journal of MS Care, 2022, 24(2): 63-66.
[19] WITTSTEIN M W, CRIDER A, MASTROCOLA S, et al. Use of Virtual Reality to Assess Dynamic Posturography and Sensory Organization: Instrument Validation Study[J]. JMIR Serious Games, 2020, 8(4): e19580.
[20] 張楠. 基于并聯運動平臺的平衡訓練系統的控制與仿真[D]. 哈爾濱: 哈爾濱工程大學, 2009.
ZHANG Nan. Control and Simulation of Balance Training System Based on Parallel Robot[D]. Harbin: Harbin Engineering University, 2009.
[21] 張晟杰. 康復助行機器人控制算法研究[D]. 上海: 上海大學, 2021.
ZHANG Sheng-jie. Research on Control Algorithm of a Robotic Walker for Gait Rehabilitation[D]. Shanghai: Shanghai University, 2021.
[22] 胡進, 侯增廣, 陳翼雄, 等. 下肢康復機器人及其交互控制方法[J]. 自動化學報, 2014, 40(11): 2377-2390.
HU Jin, HOU Zeng-guang, CHEN Yi-xiong, et al. Lower Limb Rehabilitation Robots and Interactive Control Methods[J]. Acta Automatica Sinica, 2014, 40(11): 2377- 2390.
[23] 許彧青. 助行康復機器人人機交互設計研究綜述[J]. 包裝工程, 2020, 41(8): 1-7.
XU Yu-qing. Human-Robot Interaction Design of Walking Assistance Rehabilitation Robot[J]. Packaging Engineering, 2020, 41(8): 1-7.
[24] AGUIRRE-OLLINGER G, COLGATE J E, PESHKIN M A, et al. Control of a Lower-limb Assistive Exoskeleton[C]// 2007 IEEE 10th International Conference on Rehabilitation Robotics. Noordwijk: IEEE, 2007: 188-195.
[25] BERNHARDT M, FREY M, COLOMBO G, et al. Hybrid Force-position Control Yields Cooperative Behaviour of the Rehabilitation Robot Lokomat[C]// 9th International Conference on Rehabilitation Robotics, 2005. ICORR. Chicago: IEEE, 2005: 536-539.
[26] TAN Ren-peng, WANG Shuo-yu, JIANG Yin-lai, et al. Adaptive Controller for Motion Control of an Omni- directional Walker[C]// 2010 IEEE International Conference on Mechatronics and Automation. Xi'an: IEEE, 2010: 156-161.
[27] 劉波. 床式下肢康復訓練機器人控制方法研究[D]. 蘇州: 蘇州大學, 2017.
LIU Bo. The Control Method Research of the Bed-Type Lower Limb Rehabilitation Robot[D]. Suzhou: Soochow University, 2017.
[28] GHISLIERI M, GASTALDI L, PASTORELLI S, et al. Wearable Inertial Sensors to Assess Standing Balance: A Systematic Review[J]. Sensors (Basel, Switzerland), 2019, 19(19): 4075.
[29] 睢少坤. 人體重心檢測方法研究及系統實現[D]. 保定: 河北大學, 2015.
SUI Shao-kun. Detection Method and Equipment Implementation for Human Body Center of Gravity[D]. Baoding: Hebei University, 2015.
[30] NASHNER L M, PETERS J F. Dynamic Posturography in the Diagnosis and Management of Dizziness and Balance Disorders[J]. Neurologic Clinics, 1990, 8(2): 331-349.
[31] JUNG M, STEEVES E. Effects of Virtual Reality Based Physical Therapy Interventions on Balance and Gait Performances of Chronic Hemiparetic Stroke Patients - a Literature Review[J]. International Medicine, 2019, 1(2): 1.
[32] BOZBA? G T, GüRER G. Does the Lower Extremity Alignment Affect the Risk of Falling? [J]. Turkish Journal of Physical Medicine and Rehabilitation, 2018, 64(2): 140-147.
[33] SCHEPERS M, GIUBERTI M, BELLUSCI G. Xsens MVN: Consistent Tracking of Human Motion Using Inertial Sensing[J]. Xsens Technol: 2018, 7 (25): 1-8.
[34] LIU Juan, ZHENG Ya-wen, WANG Ke, et al. A Real- Time Interactive Tai Chi Learning System Based on VR and Motion Capture Technology[J]. Procedia Computer Science, 2020, 174(1): 712-719.
[35] HOBERT M A, MAETZLER W, AMINIAN K, et al. Technical and Clinical View on Ambulatory Assessment in Parkinson's Disease[J]. Acta Neurologica Scandinavica, 2014, 130(3): 139-147.
[36] HORAK F, KING L, MANCINI M. Role of Body-Worn Movement Monitor Technology for Balance and Gait Rehabilitation[J]. Physical Therapy, 2015, 95(3): 461-470.
[37] 唐增, 孟明, 孫曜, 等. 基于多模態信息的平衡能力評估方法[J]. 杭州電子科技大學學報, 2013, 33(6): 111-114.
TANG Zeng, MENG Ming, SUN Yao, et al. Methods of Balance Capacity Assessment Based on Multi-Modal Information[J]. Journal of Hangzhou Dianzi University, 2013, 33(6): 111-114.
[38] 岳宗曉. 基于多傳感器信號融合的人體平衡分析研究[D]. 鄭州: 鄭州大學, 2019.
YUE Zong-xiao. Research on Human Balance Analysis Based on Multi-Sensor Signal Fusion[D]. Zhengzhou: Zhengzhou University, 2019.
[39] LAI C L, HUANG Ya-ling, LIAO T K, et al. A Microsoft Kinect-based Virtual Rehabilitation System to Train Balance Ability for Stroke Patients[C]// 2015 International Conference on Cyberworlds (CW), Visby: IEEE, 2015: 54-60.
[40] JUNATA M, CHENG K C C, MAN H S, et al. Development and Evaluation of a Kinect-Based Rapid Movement Therapy Training Platform for Balance Rehabilitation[C]// 2018 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Honolulu: IEEE 2018: 2345-2348.
[41] ROELES S, ROWE P J, BRUIJN S M, et al. Gait Stability in Response to Platform, Belt, and Sensory Perturbations in Young and Older Adults[J]. Medical & Biological Engineering & Computing, 2018, 56(12): 2325-2335.
[42] KIMEL-NAOR S, GOTTLIEB A, PLOTNIK M. The Effect of Uphill and Downhill Walking on Gait Parameters: A Self-Paced Treadmill Study[J]. Journal of Biomechanics, 2017, 60: 142-149.
[43] DINGWELL J B, CUSUMANO J P, STERNAD D, et al. Slower Speeds in Patients with Diabetic Neuropathy Lead to Improved Local Dynamic Stability of Continuous Overground Walking[J]. Journal of Biomechanics, 2000, 33(10): 1269-1277.
[44] TOEBES M J P, HOOZEMANS M J M, FURRER R, et al. Local Dynamic Stability and Variability of Gait are Associated with Fall History in Elderly Subjects[J]. Gait & Posture, 2012, 36(3): 527-531.
[45] BRUIJN S M, VAN DIE?N J H, MEIJER O G, et al. Statistical Precision and Sensitivity of Measures of Dynamic Gait Stability[J]. Journal of Neuroscience Methods, 2009, 178(2): 327-333.
[46] BRUIJN S M, TH TEN KATE W R, FABER G S, et al. Estimating Dynamic Gait Stability Using Data from Non-Aligned Inertial Sensors[J]. Annals of Biomedical Engineering, 2010, 38(8): 2588-2593.
[47] BRUIJN S M, MEIJER O G, BEEK P J, et al. Assessing the Stability of Human Locomotion: A Review of Current Measures[J]. Journal of the Royal Society, Interface, 2013, 10(83): 20120999.
[48] SUGANDHI K, RAJU G. An Efficient Hog-centroid Descriptor for Human Gait Recognition[C]// 2019 Amity International Conference on Artificial Intelligence (AICAI). Dubai:United Arab Emirates. IEEE, 2019: 355-360.
[49] HAK L, HOUDIJK H, STEENBRINK F, et al. Speeding Up or Slowing Down? Gait Adaptations to Preserve Gait Stability in Response to Balance Perturbations[J]. Gait & Posture, 2012, 36(2): 260-264.
[50] HOF A L, GAZENDAM M G J, SINKE W E. The Condition for Dynamic Stability[J]. Journal of Biomechanics, 2005, 38(1): 1-8.
[51] HOF A L, VAN BOCKEL R M, SCHOPPEN T, et al. Control of Lateral Balance in Walking[J]. Gait & Posture, 2007, 25(2): 250-258..
[52] MADEMLI L, ARAMPATZIS A, KARAMANIDIS K. Dynamic Stability Control in Forward Falls: Postural Corrections after Muscle Fatigue in Young and Older Adults[J]. European Journal of Applied Physiology, 2008, 103(3): 295-306.
[53] 金晟. 基于腦功能網絡特征的人體平衡能力評估研究[D]. 杭州: 杭州電子科技大學, 2020.
JIN Sheng. Research on Evaluation of Human Body Balance Ability Based on the Feature of Brain Function Network[D]. Hangzhou: Hangzhou Dianzi University, 2020.
Development Status of Anti-fall Gait Balance Training Robot
CHEN Dian-sheng, SHEN Zhen-yang, YIN Hu
(Beihang University, Beijing 100191, China)
This paper introduces the main progress of research on anti-fall gait balance training robots at home and abroad, and provides reference ideas for the research of anti-fall gait balance training rehabilitation robots and other fields of medical-industrial integration. The latest progress in the research of lower limb assisted rehabilitation robot is mainly summarized from four aspects, including: robot configuration; mechanism control strategy and algorithm; gait data collection method and gait data analysis method. In the current research, the market positioning of robots is a challenge faced by the current academic community. At present, various mainstream solutions have different focuses and different user segments. However, the main target group, the elderly, has strong user differences, so users have high personalized training needs. In the future, it is necessary to further refine the positioning of the gait balance training robot to meet the personalized training needs of different users at different stages in different situations, which is expected to improve the overall level of gait balance training robots.
gait balance training; gait data; rehabilitation robot; balance capability assessment
TB472
A
1001-3563(2022)12-0075-12
10.19554/j.cnki.1001-3563.2022.12.008
2022–01–26
國家重點研發計劃項目(2019YFB1311404)
陳殿生(1969—),男,博士,教授,主要研究方向為服務機器人。
尹虎(1974—),男,碩士,副教授,主要研究方向為產品設計和交互設計。
責任編輯:陳作
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
