深海打撈作業的海洋環境保障
——以F-35C打撈為例
2022-07-05 03:44:52張永垂胡王江
數字海洋與水下攻防 2022年3期
張永垂,胡王江,汪 洋
(1. 國防科技大學氣象海洋學院,湖南 長沙 410073;2. 軍事海洋環境建設辦公室,北京 100061)
0 引言
2022年1月24日,一架F-35C戰斗機在南海降落“卡爾·文森”號航空母艦時撞上飛行甲板,隨后墜入水中。據2月6號的公開視頻資料顯示[1]:在飛機著艦時,飛機下滑角度沒有控制好,迎角過大,使得飛行員看不清甲板,導致飛機主降落架撞向航母尾部甲板,飛機失控并打轉、著火,沿著斜角甲板滑向海里,飛行員最后彈射逃生,甲板上7名水兵受傷。初步判斷,此次飛機墜毀可能是由于飛行員操控失誤引起的。
F-35隱形戰機是美國最先進的第五代戰機之一。除美國外,日本、韓國、英國、澳大利亞、意大利、荷蘭和以色列等國都已訂購或開始部署這款戰機。F-35戰機有3種型號:F-35A是常規空軍陸基戰斗機,航程為2 200 km;F-35B是短距起飛垂直降落戰斗機,航程為1 670 km;F-35C是美國海軍專為航母打造的下一代旗艦戰機,航程約2 500 km。為適應航母作戰,F-35C的研發部署比其他兩種型號要遲很多,直到去年8月才首次正式部署到“卡爾·文森”號航母上。
據公開報道,這已是F-35型號戰機的第3次墜海事故。2019年4月9日,一架日本 F-35A在日本三澤空軍機場以東135 km的太平洋墜毀,飛行員喪生[2]。日本防衛省將其歸咎于空間迷失方向,即飛行員無法充分感知周圍環境,夜間訓練時直接將戰斗機全速飛入海中。2021年11月17日,英國“伊麗莎白女王”號航母上一架 F-35B 墜入地中海,飛行員安全彈射。據報道稱,是由于發動機吸入了防雨罩導致事故發生[3]。
F-35戰機幾乎代表了美軍戰斗機最先進的技術水平。因此,墜海事故發生后,美軍及其盟友均迅速組織打撈作業。日本F-35A幾乎被撞得粉碎,僅打撈上幾片殘骸。英國F-35B因墜海時速度較慢(機體較完整)、水深較淺,被成功打撈。此次墜機事件,與去年英國F-35B墜海狀態相似(見圖1),但從失事位置來看,水深較深(約4 000 m),給打撈作業帶來一定挑戰。

圖1 F-35C落水時漂浮狀態[4]Fig.1 Floating state of F-35C when crashed into the sea[4]
本文通過對深海打撈作業的介紹,梳理影響打撈作業的海洋環境要素,并使用業務化預報系統產品比較日本、英國和美國3次墜機事件時海洋環境的異同,分析美軍在南海成功打撈的影響因素,提出加強我國遂行深海打撈任務能力的建議。
1 深海打撈作業
深海打撈,根據距離海岸的遠近,分為近海(小于 55.6 km)、中等距離(55.6~129.6 km)和遠海(大于 129.6 km)打撈。根據水深,分為淺海(淺于91.4 m)、中等深度海(91.4~914.4 m)和深海(深于914.4 m)打撈。根據搜索區域的大小,分為出色(小于 3.4 km2)、良好(3.4~34.3 km2)、一般(34.3 ~85.7 km2)和差(大于85.7 km2)4個等級。根據作業流程,通常分為搜索和打撈2個階段。其中,搜索并準確定位是打撈作業的關鍵,而搜索技術設備或多或少都會受到海洋環境的影響。
1.1 搜索設備
常用的深海搜索設備包括回聲測深儀、側掃聲吶、聲波定位儀、光學成像系統、遙控水下航行器和導航系統等。
1)回聲測深儀。
回聲測深儀是一種通過聲波在水中傳輸來測量水深的聲吶設備[5]。根據其發射的聲波信號分為單波束和多波束回聲測試儀。目前,回聲測深儀主要用于測繪連續的海底地形數據(圖 2),這種實時信息可以保障拖曳搜索設備(例如:側掃聲吶或聲波定位儀)的作業安全。此外,海底地形數據可成為聲波入射傳播的物理障礙判斷。
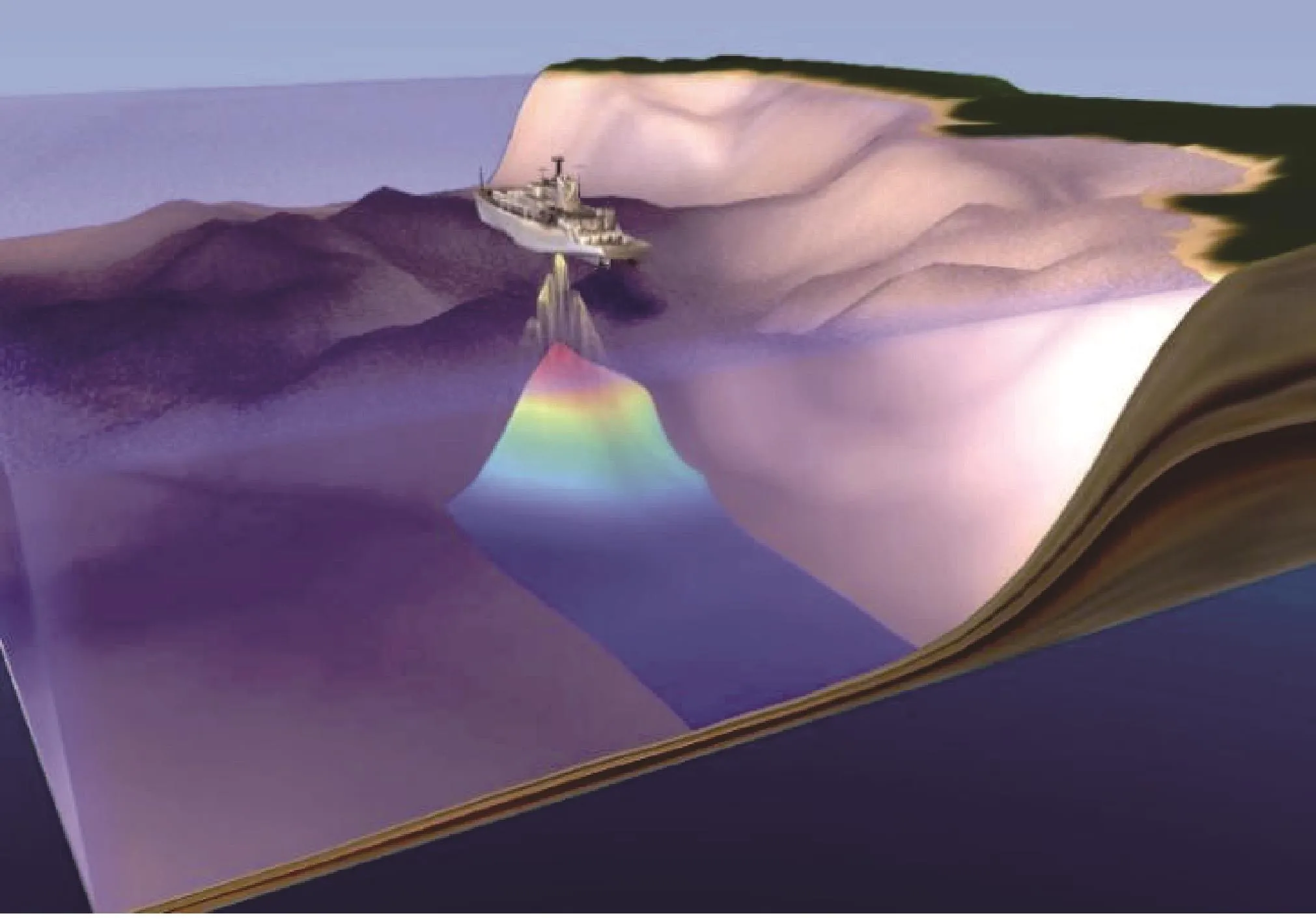
圖2 利用多波束回聲測深儀測深示意圖[6]Fig.2 Schematic diagram of sounding using a multi-beam echo sounder[6]
由于回聲測深儀的分辨率較差,且覆蓋條帶相對較窄,因此不是深海搜索的核心裝備。只有當搜索目標尺寸較大、相對密集,且位置已知時成功率才較高,如大尺寸沉船,對于飛機殘骸可能效果有限。
2)側掃聲吶。
側掃聲吶使用拖在水下的聲學換能器來生成類似航空照片的海底平面圖,其可揭示海底地形地貌及組成性質,如巨礫、淤泥、砂礫或位于海底的人造物。側掃聲吶通常是深海搜索最有效的設備(圖3),其單程覆蓋的海底范圍相對較寬(50~2 000 m),適合大面積海域搜索,效率相對較高。其有效分辨率(分辨最小物體的能力)則取決于系統的工作頻率:頻率越高,分辨率越高。然而,條帶寬度覆蓋范圍與頻率成反比,即搜索效率和分辨率反相關。因此,在實際搜索工作中,需要綜合考慮選擇合適的頻率和分辨率。例如,200 L鋼桶大小目標的搜索條帶極窄(50~100 m),需要高頻(500 kHz);沉船大小目標可選擇覆蓋長達5 km的低頻(30 kHz)。
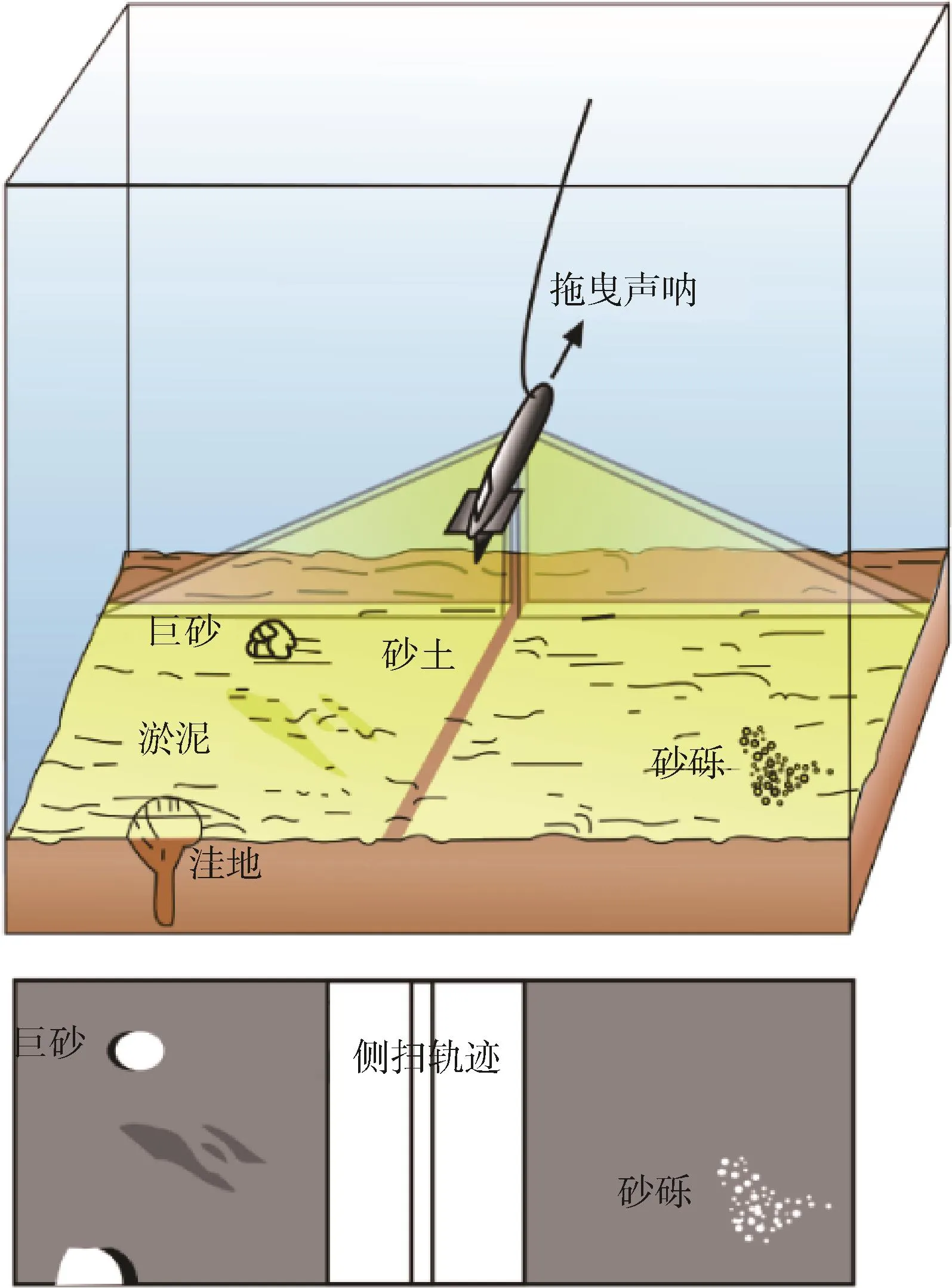
圖3 側掃聲吶示意圖[7]Fig.3 Schematic diagram of side-scan sonar[7]
多波束回聲測深儀和側掃聲吶均利用聲波搜索水下目標,兩者各有優劣:多波束回聲探測儀的優點在于噪聲少、能夠進行三維可視化分析,但其適用范圍不如側掃聲吶廣泛;側掃聲吶的優點在于拖體距海底的高度容易調節、分辨率高、能夠區分目標物的底質特征,缺點是容易受工作環境的影響產生噪聲。可見,多波束和側掃聲吶在探測海底目標時具有很好的互補性,可以配合應用。
3) 聲波定位儀。
聲波定位儀是將聲波發生器放入水中或置于水底,根據記錄的直達波和經海底反射回來的反射波之間的時差,計算儀器在水中的離底高度。拖曳聲波定位儀由水下拖曳部分、線纜、絞車、液壓動力系統、發電機以及控制臺等部分組成,可由船只拖著緩慢行進、搜索,速度通常為1~5 kn(圖4)。
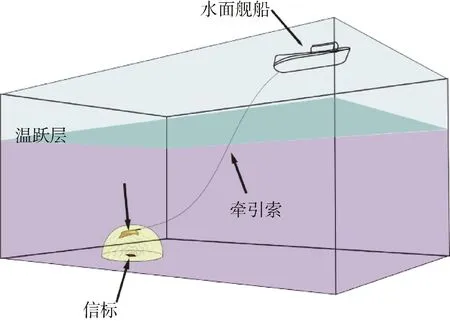
圖4 拖曳式聲波定位儀(TPL)示意圖[8]Fig.4 Schematic diagram of Towed Pinger Locator[8]
其欲定位的“聲波發生器”(信標)通常安裝在商業飛機的飛行記錄儀上,這對事故原因的調查非常重要。大多數“聲波發生器”通常以37.5 kHz的頻率發出信號,而拖曳聲波定位儀可以探測從3.5~50 kHz頻段的信號。信標信號相對較弱,接收設備必須在1 n mile內才能檢測到它。通常,聲波定位儀部署在溫躍層下方、海底上方約 300 m處,可以水平掃描約 3 700 m寬的條帶。由于接收設備無法提供方位信息,因此船上控制人員對信號最強處的位置進行記錄,并多次反復測量,通過“三角定位”來確定信標的位置。
聲波定位儀僅適用于信標位置在局部范圍內已知的情況。當前,國際上最知名的拖曳式聲波定位儀當屬美國海軍的 TPL-25,最大作業水深達6 000 m,最大探測量程超過3 000 m(圖5),在馬航MH370等事故的黑匣子搜索中使用過[9]。

圖5 美國海軍拖曳式聲波定位儀(TPL-25)Fig.5 U.S. Navy's Towed Pinger Locator(TPL-25)
4)磁力計。
磁力計是一種測量磁場強度的儀器(圖6)。
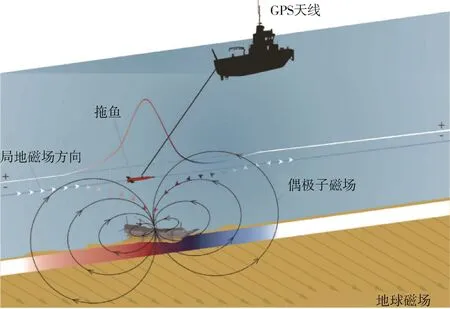
圖6 磁力計搜索示意圖[10]Fig.6 Schematic diagram of magnetometer survey[10]
使用磁力計進行水下搜索限于被磁化的金屬物體(必須包含鐵或鋼),常見有:金屬管道、鋼制電話電纜、鋼殼船、發動機、錨、錨鏈、槍支、水雷、潛艇、飛機(通過其發動機)和古代船只。磁力計檢測范圍相對有限(物體的磁響應大致以傳感器與物體之間距離的立方的速率降低)。因此,其不經常用作深海搜索的主要設備,但可作為側掃聲吶搜索的輔助傳感器,特別是目標在復雜環境中丟失的情況下,如在海底巖石區,從物體返回的聲吶信號不容易與巖石區分開來,通過串聯拖曳側掃聲吶和磁力計傳感器可提高物體被探測的概率。
此外,磁力計是唯一能夠定位深埋在底部沉積物中物體的設備。對于露出沉積物的各種水下目標,側掃聲響能夠精確地進行定位和分析,但對埋藏于沉積物下的磁性目標物進行探測,是海洋磁法探測的優勢。
5)光學成像系統。
光學成像系統作為獨立使用還是與側掃聲吶配合使用已廣泛應用于深海搜索。光學成像系統的顯著優勢是產生的圖像可以直接識別物體,而不需要耗時分類。不過,光學成像系統的缺點也有很多,如極窄的條帶寬度和范圍,相對較低的拖曳高度,總體搜索速度和搜索率較低。
6)遙控水下航行器(ROV)。
與上面討論的搜索設備不同,ROV本質上并不是一種能夠通過感測物體的物理特性來檢測的傳感器,僅是一個將傳感器攜帶到深海并操縱它們的一個平臺。ROV僅限于在相對較小的區域內運行,因為支援船需要直接懸停在ROV上空以及受控于系纜對系統機動性的影響。作為一種搜索工具,ROV可以非常有效地定位先前使用側掃聲吶的小型孤立目標,或者當已知在大約1平方英里內的大型目標。為此,ROV使用機載搜索傳感器(聲學和光學)來定位物體,確認其身份并執行其他與任務相關的任務。
美軍現役的深海搜索和打撈ROV有:CURV-21,DeepDrone8000和MR2HYDROS等。其中,CURV-21是美國海軍主戰裝備(圖7)。CURV-21和集成的機械手臂可以實現搜索和打撈功能,能夠在側掃聲吶和打撈操作之間切換。CURV-21是獨立的設備,可通過飛機快速部署到打撈船上。能夠實現6個方向的自由移動。配備的聲吶可用于目標定位和信標檢測。配置了高分辨率數碼相機、黑白和彩色電視攝像機。
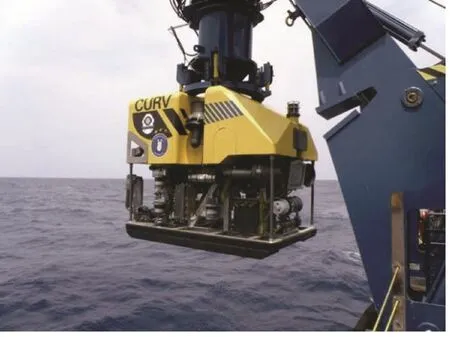
圖7 美國海軍現役ROV(CURV 21)Fig.7 U.S. Navy ROV(CURV21)on active service
1.2 搜索和打撈作業流程
《美國海軍船舶打撈手冊卷4(深海作業)》將深海搜索和打撈分為4個階段,分別是:籌劃、動員、現場作業和退場[12]。這4個階段必須結合成為一個整體,才能有效保證搜索和打撈的順利完成(圖8)。
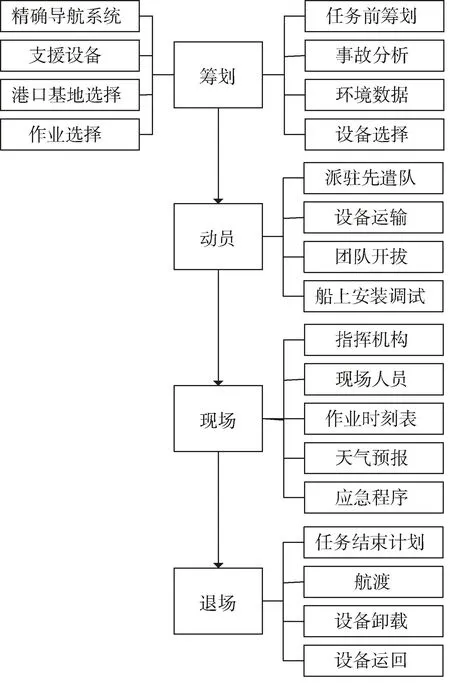
圖8 深海搜索和打撈流程圖Fig.8 Flow chart of underwater search and recovery operations
1) 籌劃。
深海作業的復雜性要求周密的籌劃和準備。籌劃人員必須詳細了解任務,為打撈任務和出現的意外情況確定合適的設備。例如,搜索和打撈設備需與救援船舶兼容,能夠在預期的水深條件下開展作業。同樣,救援船舶需滿足任務要求,在特定海洋環境條件下開展作業。
籌劃遵從特定的從一般到具體的邏輯順序。在面對不斷變化的深海狀況時,籌劃人員和作業人員也需靈活變化,既不能呆板地遵守計劃,也不能隨意地更改計劃。籌劃具體包括8個部分:任務前籌劃、事故分析、環境數據、設備選擇、精確導航系統、支援設備、港口基地選擇以及作業計劃。
①任務前籌劃。任務前籌劃旨在收集所有已知或預期的工作參數,以便有效地裝備合適的硬件設施、確定后勤保障需求、制定應急計劃和動員人員。
②事故分析。必須收集和審查與事故有關的所有數據,以便確定事故情景和搜索基準位置。事故數據來源眾多,有雷達數據、導航數據、僚機位置、目擊者報告等,這些數據的準確性和可靠性對基準位置的判定和打撈區域概率評估十分重要,從而確定搜索區域的總體大小和最高概率的位置。
③環境數據。一旦確定打撈區域,就必須收集詳盡的環境數據,以協助制定打撈計劃。環境數據包括:水深,海底地形,海流和潮汐,當前和未來的天氣狀況和海況,影響作業的障礙或危害(如航道、拖網捕魚區、海底作業區、海底電纜、海底井口、已知沉船區等),與最近導航岸站的距離以及現場的后勤保障等。
④設備選擇。根據任務目標和預期的現場條件等有關信息,確定相關設備。美軍根據位置和水深情況,開發了一套“獵戶座”搜索系統,幫助確定任務所需的設施設備,通常有ROV深潛器、CURV或Mini-Rover。此外,建立了一套設備檢查表,對照準備關鍵設備和備件,確保不會落下任何所需的設施、設備。
⑤精確導航系統,包括LORAN-C、微波測距瞄準系統、超高頻超視距系統、差分全球定位系統(DGPS)等。對于偏遠的深海區域,通常也投入長基線聲學導航系統。
⑥支援設備。根據任務目標和其他相關行動選擇支援設備。例如,海上支援平臺可以是大型或小型的船舶,具體取決于任務、離岸距離、預期的天氣和海況、甲板作業空間、任務所需的起重能力、作業時間等。
⑦港口基地選擇。港口的選擇需多方考慮,包括與作業地點的距離,港口設施完善程度,通訊能力,以及靠近機場、便捷的交通等。
⑧作業計劃。根據已有的充分信息,制定詳細的執行計劃,包括搜索路徑間距、搜索路徑、范圍比例和重疊區域等。也包括制定應急計劃,如替代方案、替代設備、天氣規避計劃和安全通信計劃等。
2) 動員。
動員階段進一步細分為:派駐先遣隊、設備運輸、團隊開拔和船上安裝調試。
①派駐先遣隊。先遣隊在動員和計劃中發揮著關鍵作用。由專業知識豐富的搜索和打撈小組成員組成先遣隊,開展現場準備,完成初步的工作計劃。先遣隊與目標方會面并簡要匯報情況,驗證任務前分配、分析有關結果,驗證卡車和物料搬運設備的容量和可用性,進行裝載安排并協調運輸時間等。
②設備運輸。設備運輸的方式包括陸運、空運、海運或三者有機結合。美軍大多數搜索和打撈設備是準備就緒的,可立即運輸。
③團隊開拔。設備可能安裝在軍用或民用船只上。打撈項目負責人與操作人員、美國海軍打撈主管代表和指揮官(或支援機構)協調設備的安裝。例如,在軍用設施上進行安裝,需在設備和人員到達之前提交許可申請。所有承包商人員均需攜帶證明文件方可登入。
④船上安裝調試。安裝完成后,需盡快完成完整的系統測試,以確定系統的狀態、準備情況和所需額外的準備工作。水下測試需與甲板系統測試同步進行。
3) 現場作業。
現場作業需要船員與搜救專家的密切配合。對于復雜的操作,需進行提前演練,讓參與者熟悉自己的角色和任務,同時了解其他人的職責。現場作業階段涉及到的要素有:指揮機構、現場人員、作業時刻表、天氣預報、應急程序。
①指揮機構。在面對復雜的任務時,需要有岸上和海上指揮部,本國和外國代表組成的聯合軍事小組,以及后勤、技術和公共關系小組。
②現場人員。參與者的角色和關系在行動之前明確,根據現場工作內容,確立了現場人員職責:駐外海軍指揮官及其參謀人員、艦長或船長、美國海軍打撈潛水部(Supervisor of Salvage and Diving,SUPSALV)代表、承包商項目經理、技術顧問/事故調查員以及岸上設施。
③作業時刻表。需制定一個總體作業計劃并發至所有關鍵方,包括:計劃執行的日期和時間、返回時間、通訊時間表、備用緊急服務規定等。
④天氣預報。天氣和海況對海上作業至關重要,需針對作業區域制定定期的天氣報告、長期和短期預報以及緊急情況報告,并指定美國海軍為特定行動提供特殊或補充預報。
當下,主打食材安全、健康,提倡本源味道的有機餐廳已成為餐飲界的一股清流,部分高檔酒店的中、西式餐廳也逐漸將有機食材視為餐廳標配,以滿足中高檔消費群體對于“吃”的品質追求。
⑤應急程序。仔細審查、確定最近的港口、適合的錨地,以便在惡劣天氣下進行庇護;也包括確定最近的醫療機構,并建立醫療后勤保障方式。
4) 退場。
退場即所有設施設備和團隊人員安全返回各自基地。退場需做好任務結束計劃、航渡、設備卸載和設備運回。
①任務結束計劃。初步退場計劃在行動計劃初期制定,需將從行動中吸取的經驗教訓進行總結并納入退場計劃,包括運輸方式、包裝、文件、停泊要求和設備的可用性等。此外,必須考慮已打撈目標物的性質,在退場計劃中將其處置細節作為優先事項。
②航渡。航渡為系統卸載提供了充裕的時間,也為管理任務提供了契機,確保最終報告所需的數據是完整且有序的。
③設備卸載。對大型設施設備的拆卸由岸上后勤人員執行,設備卸載后,根據需要對船舶進行保養和維修。
④設備運回。設施設備運回基地的方式取決于額外的后續任務或安排、成本與緊迫性、距離、實用性以及運輸設備的可用性等,與動員階段基本一致。
1.3 影響作業要素
1)飛機入水方式。
飛機是高速撞擊入海還是低速平緩入海決定了飛機殘骸的完整度。如果飛機是高速墜海,撞擊海面后沉入海底破碎的概率較大。如果飛機低速入海,如英國航母“伊麗莎白女王”號F-35B滑躍失敗后墜入海中,能夠保證飛機的完整度,打撈的難度相對較低。通過公開的照片(圖1)可以看出,此次美國海軍F-35C墜海后整機相對完整,打撈的成功性很大。
2)海洋環境。
①水深和地形。
事發區域海水深度不僅決定了打撈作業的難度,而且越深的海水一般海洋環境變化越復雜,當前的預報系統難以準確預測,將增大搜索目標的難度。
海底地形的復雜程度同樣影響目標物的搜索。若海底地形陡峭,伴有海山、海溝、峽谷等復雜地形,即便飛機停底后,也可能會出現二次移動或被底流帶來的沉積物所覆蓋,增加打撈難度。
②海流。
飛機墜海后,在洋流的作用下會發生漂移,即飛機落水點并不等于實際的打撈點。在洋流的作用下,飛機可能已經漂到了距離墜海點較遠的位置,給搜索和定位帶來一定的不確定性。
3)天氣狀況。
由于打撈母船需要在事發海域作業一段時間,期間的海面天氣狀況決定其是否能夠作業。若遇強烈天氣系統,如熱帶低壓、臺風、冷空氣等,將掀起海面大浪,影響打撈母船作業安全,需應急避風。
2 事發海域海洋環境特征分析
此次 F-35C墜海位置相對確定,搜索半徑亦可相對明確,飛機的搜索和定位相對簡單。通過環境預報系統對事發海域海洋環境進行分析,有利于進一步確定搜索方位,并為打撈計劃的制定提供指引。
2.1 業務預報系統簡介
本文使用法國麥卡托海洋環境預報系統對事發海域和墜機時刻的海洋環境特性進行分析[13]。麥卡托海洋于2014年11月11日受歐盟委員會的正式委托,負責哥白尼海洋環境監測服務(Copernicus Marine Environment Monitoring Service,CMEMS)的全球高分辨率海洋分析和預報業務。麥卡托海洋高分辨率的全球海洋分析和預報系統基于 NEMO V3.1開發。物理配置基于三極ORCA12網格類型(全球(1/12)°),赤道的水平分辨率為9 km,哈特拉斯角(中緯度)為 7 km,羅斯海和威德爾海為2 km。垂直分為50層。數據同化系統為麥卡托同化系統(SAM2),同化的數據包括 CMEMS發布的海表面溫度(Sea Surface Tempersture,SST)、沿軌海表面高度異常以及現場觀測溫鹽剖面;大氣強迫來自 ECMWF的綜合預報系統(Integrated Foreeast System,IFS)。
2.2 影響事發區域海洋環境特征分析
1)水深和地形。
根據ETOPO全球水深地形數據,F-35三次墜海事發海域(日本三澤機場以東海域,埃及和塞浦路斯之間地中海海域,黃巖島東北海域)的水深分別為636 m、1 351 m和4 000 m(圖9)
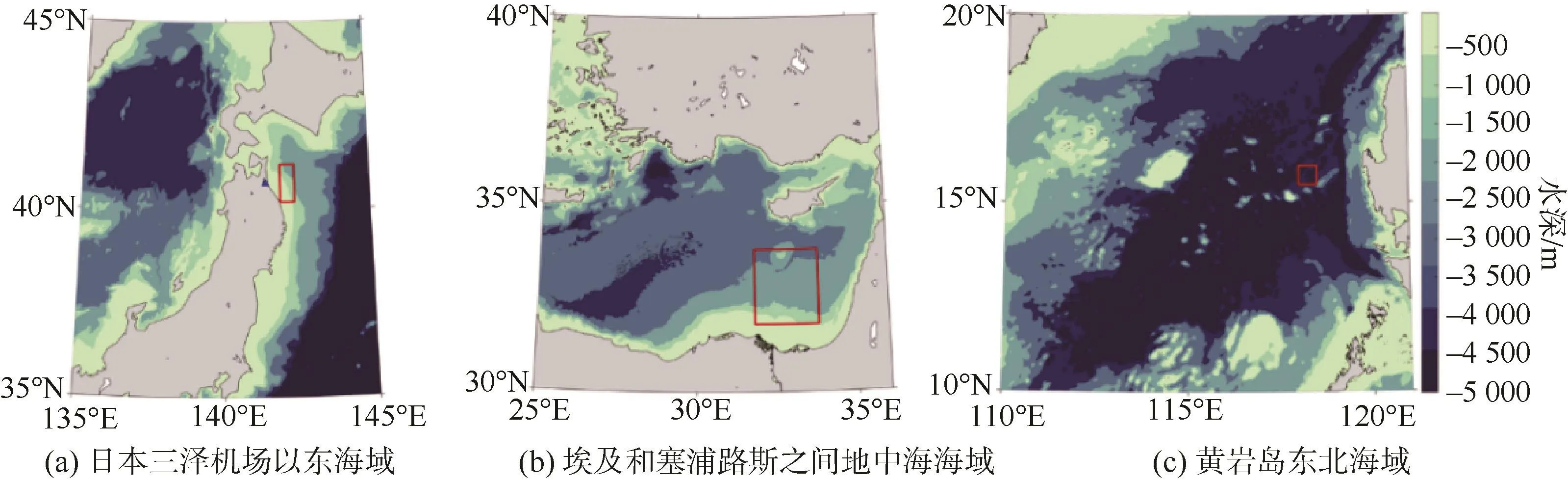
圖9 3次F-35墜海事故發生區域水深Fig. 9 Bathymetry of the ocean where F-35 crashed for three times
南海墜機海域海底地形較為復雜,其東為深達5 400 m的馬尼拉海溝。該海溝也是中國中沙群島與菲律賓群島的自然地理分界線。最深處達4 637 m,最淺處為2 209 m。海底地形極其陡峭,在不到40 km范圍內落差超過2 400 m(圖10)。
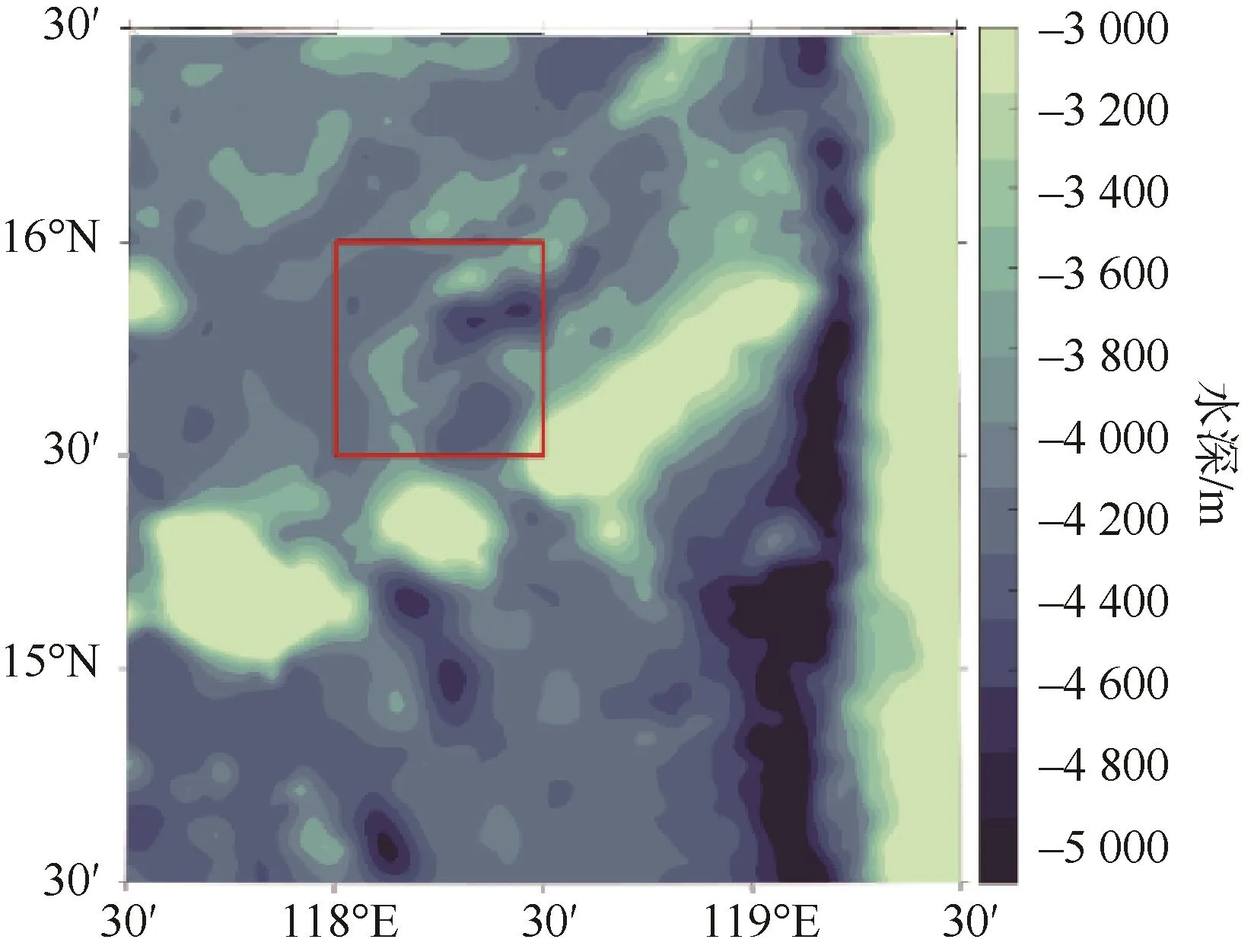
圖10 F-35C事發海域海底地形Fig. 10 Topography of the ocean where F-35C crashed
2)環流。
日本三澤機場以東太平洋海域以日本海貫穿流流出津輕海峽后沿日本海本島南向流為主,平均流速大小為0.35 m/s(圖11)。
埃及和塞浦路斯之間地中海海域流向較為復雜,但總體流速較慢,平均流速大小為0.07 m/s(圖12)。
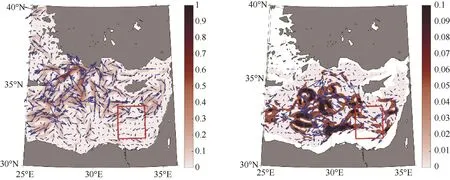
圖12 2021年11月17日地中海海面流(左)和水深超過1 000 m底層流(右)Fig. 12 Sea surface currents(left)and bottom currents below 1 000m(right)in Mediterranean Sea on November 17,2021
黃巖島東北南海海域處于海盆尺度、中尺度渦旋和次中尺度多尺度相互作用海域,流向復雜多變,平均流速大小為0.13 m/s(圖13)。
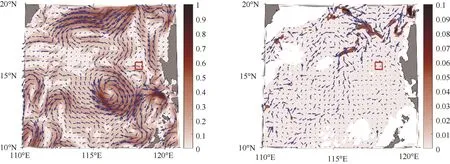
圖13 2022年1月24日南海海域海面(左)和水深超過1 000 m底層(右)流Fig. 13 Sea surface currents(left)and bottom currents below 1 000m(right)in the South China Sea on January 24,2022
3) 海況。
南海受季風控制,冬季盛行東北風。事發海域位于呂宋島背風區域,風速相對較小。2022年 2月份10 m平均風速為4.77 m/s(圖14)。南海海浪波高總體呈現南高北低特征,呂宋海峽附近有效波高2 m以上。事發海域有效波高約1.45 m,為中浪區。海浪主導因素為涌浪,涌浪浪高約1.25 m;風浪起次要作用,浪高約0.53 m(圖14)。
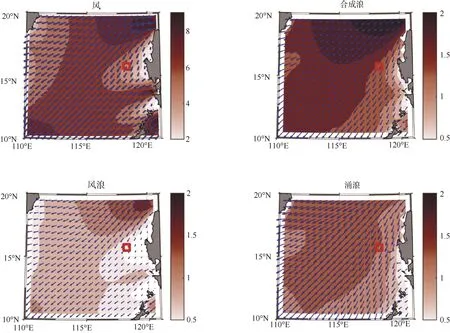
圖14 南海深水區2月平均風場和海浪場Fig.14 Mean wind and wave fields in the deep-water area of the South China Sea in February
2.3 綜合分析
此次美國海軍F-35C失事的打撈屬于遠海(距呂宋島西海岸170 n mile)和深海(4 000 m)作業。飛機入水后保存相對完整,落水初始位置準確掌握,海表和海底流速相對較小,沉入海底的位置可能會偏離,但在其可控范圍內。與去年F-35B在地中海海域失事情形相比較,美軍對落點位置的定位應該屬于出色(表1)。
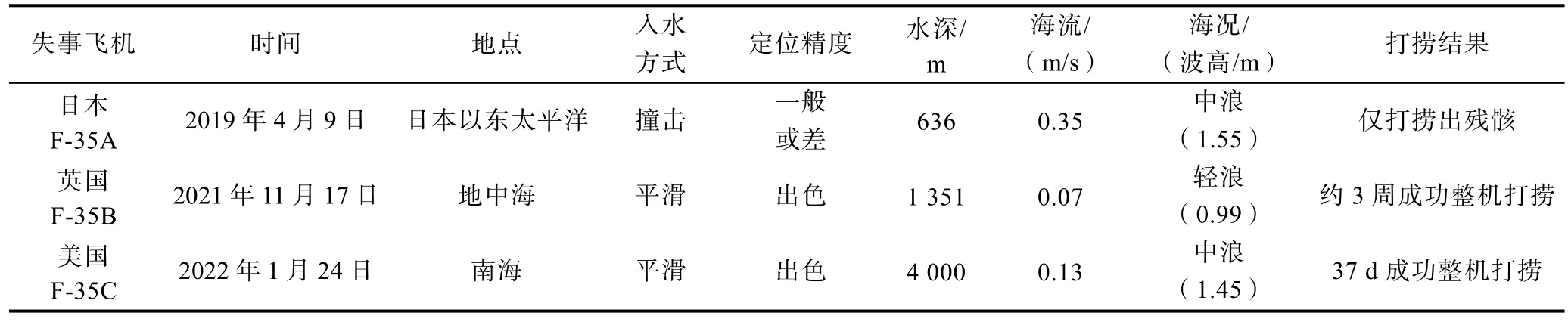
表1 3次F-35飛機墜海事件一覽表Table 1 List of the three crashes of F-35 fighter plane
美國海軍有較為豐富的深水打撈經驗,如一架MH-60S“海鷹”直升機于2020年1月25日墜入沖繩海岸附近5 814 m水深海域。搭載專業打撈設備CURV 21的打撈船3月從關島出發,海上航行5 d到達事發海域。3月17日開始打撈,于次日便成功打撈。此次失事海域水深在4 000 m左右,在美國海軍打撈能力范圍內。
海況因素來看,作業區域在2月份基本為中浪區,對打撈母船的作業影響不大,但南海春季復雜多變的天氣狀況、頻發的海洋中小尺度過程可能會對搜索和打撈作業帶來一定的挑戰。
針對此次打撈,美國海軍租用了專為深海打撈設計的“畢加索”號打撈船,搭載美軍的CURV-21遙控水下航行器,于 2022年 3月 2日成功打撈F-35C艦載機,共用時37 d,展示了美軍強大的深海打撈救援能力。
3 結束語
鑒于深海戰場空間的獨特性和重要性,各海洋強國都在積極加強深海技術研究,深化軍事領域的運用,意圖占領深海這一新空間的制高點和主動權。為了提升我國遂行深海打撈任務海洋環境保障能力,建議如下。
1)制定深海打撈作業海洋環境保障規范。
深海打撈作業技術復雜、任務急迫。涉及到的技術包括精準定位失事位置,海底精確測繪,深海打撈設備研發,且在搜索和打撈階段都嚴重依賴海面到海底的整層海洋環境特征變化。美國海軍在深海搜索和打撈方面取得了顯著成效,相比較而言,我國尚未形成為深海打撈任務的針對性保障流程。建議專門針對深海搜索和打撈作業,梳理制定深海打撈海洋環境保障規范化流程。
2)研制深海打撈作業海洋環境保障產品。
深海打撈作業的核心因素是定位沉入海底后的準確位置。深海環境復雜多變,影響準確定位的環境要素包括海流、溫躍層、海底地形等。崎嶇不平的海底會顯著改變正壓潮流的流速和流向,產生內潮,造成海底海流復雜難辨。溫躍層是深海聲波向上傳播的屏障,海底信標發射的聲波信號無法有效傳至海面,如拖曳式聲波定位儀工作時需位于溫躍層以下,結合2021年10月美國海軍“康尼狄格”號潛艇在南海撞山事故,建議開展深海海洋環境數據庫建設、海洋環境特征分析研究,研發深海打撈作業專題保障產品。
3)發展深海搜索和打撈技術。
目前深海搜索和打撈的主要手段是側掃聲吶、聲波定位儀和水下潛航器等。美國海軍現役的拖曳式聲波定位儀(TPL-25)和遙控水下潛航器(CURV-21)最大作用深度都達到了6 000 m,具有很強的深海搜索和打撈能力。建議不斷開展深海搜索打撈相關技術研究,研制自主可控的深海搜索和打撈設備。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
故事大王(2016年7期)2016-09-22 17:30:08
工業設計(2016年12期)2016-04-16 02:52:00
設備管理與維修(2015年12期)2015-04-09 06:57:00
消費者報道(2014年7期)2014-07-31 11:23:57
