利用Tracker軟件改進拉伸法測金屬絲的楊氏模量實驗
2022-07-05 01:56:02毛佳欣李盼余海森張玖琪丁益民
物理通報 2022年7期
毛佳欣 李盼 余海森 張玖琪 丁益民
(湖北大學 物理與電子科學學院 湖北 武漢 430062)
楊氏彈性模量是反映材料形變與內應力關系的物理量,是選擇機械構件材料的依據,是工程技術上常用的參數.拉伸法測金屬絲的楊氏模量實驗是大學物理實驗中十分經典的實驗之一,在該實驗中,對金屬絲微小伸長量的測量采用的一般是光杠桿法,而光杠桿法通常又分為望遠鏡法[1]和激光杠桿法[2],本實驗利用Tracker軟件對激光杠桿法測金屬絲的楊氏模量實驗進行了改進.針對傳統激光杠桿法實驗中,由于激光光斑大,導致讀數誤差大的不足,利用Tracker軟件來追蹤激光反射光斑的軌跡,并精確地分析出光斑移動的距離,從而實現對楊氏模量的精確測量.實驗表明該方法能有效地減小不確定度,提高實驗的測量精確度.
1 實驗原理及方法


(1)
稱為楊氏彈性模量.
金屬絲的直徑為d,其橫截面積
代入式(1)可得
(2)
根據式(2),伸長量ΔL的值十分小,一般工具不易測量,因此采用光杠桿法來測量.原理如圖1所示[3].
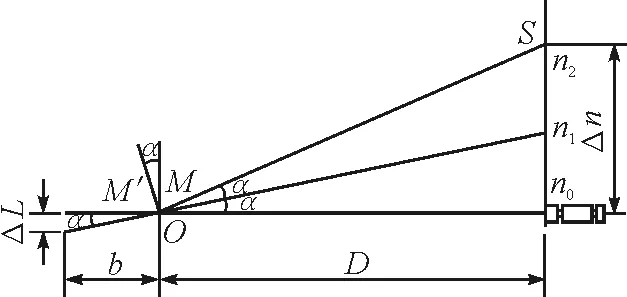
圖1 光杠桿原理圖
當砝碼加在砝碼托盤上時,金屬絲被拉長ΔL,光杠桿鏡面向后傾斜了α角, 后足繞兩前足尖的連線也轉過了α角.
設金屬絲未伸長前從望遠鏡里讀的標尺為n0,金屬絲伸長后,從望遠鏡里讀得標尺讀數為n2,Δn=n2-n0.金屬絲被拉長或縮短后,鏡面的法線轉過α角,入射光和反射光的夾角為2α.設鏡面到標尺的距離為D,光杠桿的兩個后足到前足連線的垂直距離為b,在α比較小的情況下
聯立兩式消去α,得
(3)
(4)
即為本實驗測量金屬絲楊氏模量E的計算公式.
2 實驗裝置及步驟
2.1 傳統法
傳統的激光杠桿法測金屬的楊氏模量實驗裝置示意圖,如圖2所示.

圖2 傳統實驗裝置圖[6]
(1)調節支架底部的3個螺旋,平臺達到水平(可用水準器或手機Phyphox檢查).
(2)放上光杠桿平面鏡,使之鏡面豎直.調節望遠鏡鏡筒水平并與鏡面等高,再調節望遠鏡使之能從目鏡中清晰地看到標尺的像和十字叉絲,且無視差.記下十字叉絲橫線對準標尺的某一刻度初始值n0.
(3)依次增加砝碼(每次增加1 kg),較穩定后逐次記下相應的刻度;再按相反順序將砝碼取下,較穩定后逐次記下相應的刻度.來回測3組.
(4)測量L,D,b,d各6組數據.
2.2 Tracker軟件法
Tracker軟件是建立在Java代碼庫的可進行音像視頻分析和動力學建模的軟件,它可以對導入的視頻進行實時質點追蹤,記錄位移、速度、加速度等數據,并自動繪制質點運動圖像和進行多物理量分析[4,5].
該實驗與傳統方法相比節省了人力并且不需要多次調試裝置,只需簡單的電腦軟件分析就可獲取所有數據.與此同時,它可以精確選擇光斑的中心位置,通過定標精確計算出光斑每加減1 kg砝碼所移動的距離,進而計算出楊氏模量.
(1)將傳統方法里的望遠鏡替換成激光筆,使激光光斑投射在平面鏡上,再由平面鏡反射到黑板上,此時會在黑板上產生一個光斑.
(2)為方便Tracker軟件定標,提前在黑板上繪制一條10 cm的直線,為了更加準確,也可以貼一條10 cm的彩色膠帶.在黑板前放置一臺手機拍攝光斑移動的過程,實驗過程中注意手機鏡頭需保持與黑板平行,且不可距離黑板太遠,否則會增大誤差.
(3)激光發射器前方就放置和傳統實驗用到的一樣的支架和光杠桿平面鏡等.調節光杠桿平面鏡,使鏡面的法線保持在水平方向.
(4)依次增加砝碼(每次增加1 kg),較穩定后加下一個砝碼;再按相反的順序取下砝碼.在加減砝碼的同時開始拍攝,直到加減完畢,停止拍攝.
(5)用Tracker軟件分析手機拍攝的視頻,通過分析圖像就可以得知每加減1 kg砝碼光斑移動的距離.
(6)測量L,D(鏡面到墻上反射光斑的水平距離),b,d各6組數據.
3 數據分析和處理
3.1 傳統法
金屬絲平均長度L=94.20 cm,金屬絲直徑d=0.601 mm,主桿尖腳到其余兩尖腳連線的垂線長度b=5.98 cm,平面鏡到標尺的距離D=1.632 m,測得實驗數據如表1所示.
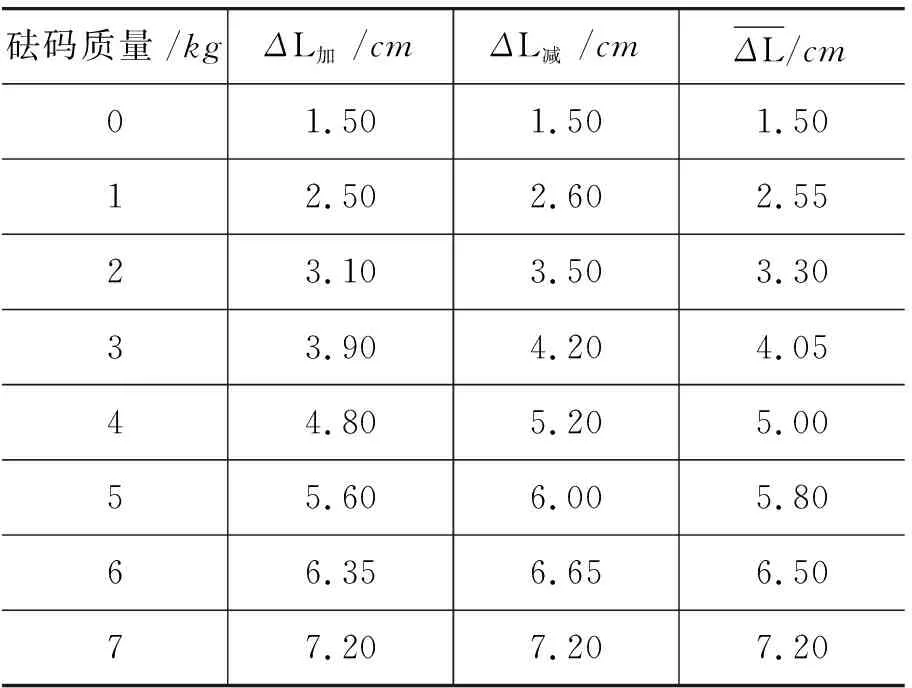
表1 傳統方法實驗數據
該表格即為傳統實驗方法數據,測得楊氏模量為(2.2±0.2)×1011Pa.
3.2 Tracker軟件法
金屬絲平均長度L=94.20 cm,金屬絲直徑d=0.601 mm,主桿尖腳到其余兩尖腳連線的垂線長度b=5.98 cm,Tracker軟件法里的D=69.71 m,并用Tracker軟件對視頻進行分析,如圖3和圖4所示.

圖3 Tracker軟件畫面

圖4 Tracker分析圖像
圖4即為Tracker逐幀分析視頻所得光斑移動圖,從圖中可以直接明了地讀出每加減1 kg砝碼光斑所移動的距離.測得實驗數據如表2所示.

表2 Tracker方法實驗數據
分析數據可得楊氏模量為(1.94±0.08)×1011Pa.
數據處理方法如下:兩組方法所測數據均用Origin處理,使用線性擬合即最小二乘法得出Δn,A類不確定度和B類不確定度后,將Δn代入式(4),即可求出楊氏模量.
不確定度計算方法如下.
A類標準不確定度
(5)
B類標準不確定度
(6)
直接測量的合成標準不確定度
(7)
相對標準不確定度
(8)
間接測量的合成不確定度計算
(9)
將式(4)代入式(9)得到
將上述直接測量的數據,L,D,b,d分別用上述公式算出A類標準不確定度,B類標準不確定度和直接測量的合成不確定度.再用Origin處理的數據算出Δn的合成不確定度.最后利用式(9)算出楊氏模量的間接測量的合成不確定度.
傳統法楊氏模量表達式
Y=(2.2±0.2)×1011Pa
Tracker法楊氏模量表達式
Y=(1.94±0.08)×1011Pa
可見從不確定度的評判來看,Tracker法的測量精度高于傳統法.查閱資料后可知一般鐵絲的楊氏模量值為1.9×1011Pa左右,顯然Tracker法測量的結果也更接近真實值.
4 結束語
通過實驗的測量結果比較可知,Tracker法測楊氏模量不僅簡化了實驗操作進而降低了實驗難度,而且所測得的實驗數據比傳統實驗測得的結果更為準確.在傳統實驗中調節實驗儀器總是需要花費較大精力,學生們測得的數據誤差也較大.而改進后的實驗方法只需要擺好實驗儀器后,拍攝出實驗過程,較難的數據分析和選取皆有電腦完成,簡單便捷.同時該方法解決了的激光法測量實驗中光斑較大從而導致誤差較大的問題,利用Tracker軟件可以選取定位到每一幀畫面的光斑中心位置,減小了誤差,同時把電腦軟件Tracker加入進行實驗中的測量和數據處理擴寬了學生的實驗思路,激發大學生的學習熱情,值得在大學物理的實驗中應用.
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
