自動化監測系統在深基坑監測中的可靠性研究
2022-07-06 08:28:00陸召春
智能建筑與工程機械 2022年5期
陸召春


摘 要:首先對自動化監測系統應用于深基坑監測作業時的要素以及精度可靠性進行分析,之后介紹了整體監測方案的構成。在此基礎上,圍繞尺度變形、水平位移兩項深基坑監測作業的可靠性進行了驗證分析,供參考。
關鍵詞:自動化監測系統;深基坑監測;尺度變形;水平位移
中圖分類號:TU4333 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文獻標識碼:A ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文章編號:2096-6903(2022)05-0103-03
0 引言
深基坑是指開挖深度至少達到5 m,或者是深度未達到要求,但工程所在地的地質條件以及周圍環境、地下管線構成等均十分復雜的工程。深基坑監測是深基坑工程施工中的一個重要環節,在基坑開挖、防護系統搭建的過程中,為盡量提高工程隊的安全程度,需要對基坑及鄰近區域黨的巖土形狀、支護結構是否發生變形、環境條件的變化情況等進行全方位的觀察以及分析。只有充分掌握相關信息,才能精確指導深基坑相關設計與施工。為達到上述目的,探索自動化監測系統的應用可靠性甚為必要。
1 基于自動化監測系統開展深基坑監測工作的要素及精度可靠性分析
1.1 自動化監測系統的設備構成
在自動化監測系統中,全站儀等測繪設備是最主要的功能性設備,可以測量水平角、垂直角、斜距、平距、高差,是一種集多種測繪功能于一體的測繪儀器系統[1]。在應用于深基坑監測相關作業時,自動化監測系統一般以全站儀作為核心設備,以光學/電子經緯儀等設備為輔助。設備連接后,可將全站儀自帶的測量光學刻度盤替換為光電掃描刻度盤。以此為基礎,人工光學測微讀數的環節會被替換為自動記錄及讀數顯示,可大幅度降低包含深基坑角度測量在內的監測工作的復雜程度。此外,出現讀數誤差的幾率也較低。有研究顯示,在深基坑監測作業期間,只需將全站儀等設備安裝在既定位置(測站)后,便可實現對整個深基坑的監測。
除了核心設備之外,云計算、局域網/通訊網等多網無縫連接等技術的應用,共同構成一套完整的智能基坑在線監測系統,能夠對基坑施工現場進行實時監測。根據組網規模的大小,最小可只圍繞一個基坑及附近一定范圍內進行檢測;最大可同時容納數以萬計的橋梁、隧道、邊坡等結構物進行監測,形成大區域性結構監測平臺,并對所監測的內容進行統一管理。
1.2 自動監測系統應用于深基坑監測時的精度控制
使用監測設備構成的自動化監測系統開展深基坑監測作業時,必須提前設置好觀測站的位置,之后需要將監測設備安裝在觀測站之上。但此時還不能立刻開展監測作業,而是需要對自動化監測系統的精度進行檢驗。如基于全站儀和經緯儀的自動化監測系統監測深基坑時,采用的方法為“全圓單測站觀測”。
此種方法是劃屬“方向觀測法”,主要流程為:在監測前需對儀器設備進行歸零處理,之后開展觀測。適用的環境為:測站待測方向數量超過3個但沒有超過6個。如果待測方向少于3個或多余6個,則應該使用簡單方向觀測法以及分組方向觀測法)。具體的操作原理為:將2個或以上的方向設置為一組,之后從起始方向開始,沿著水平方向進行觀測。待到正鏡和(或)倒鏡處于半測回的狀態時,將儀器設備調整至照準方向并讀數[2]。
應用自動監測系統時,首先需要將儀器架放置于選定的觀測墩上。經過多次預監測比對,發現中誤差(測量中按照有限次觀測的偶然誤差,最終求得的標準差。)幾乎不存在,對監測結果產生的干擾微乎其微,故無需納入分析。具體的中誤差排除過程為:在監測工作開展之前,需在深基坑監測工作區內完成三維空間坐標監測體系的設置。以監測設備所處位置設置為原點,長度(X)、寬度(Y)、高度(Z)三項坐標值均為0,原點以O表示。隨機選擇深基坑內一個點位,以P表示。通過監測設備測量角度,得到的結果分別為:原點O與P點之間的水平角度為α,垂直角度為β,斜距為L。代入數學關系,求得P點的橫向(平面)、縱向(平面)、縱向(立體),即分別對應X、Y、Z的具體坐標值分別為:Xp=L·cosα·cosβ,Yp=L·sinα·cosβ,Zp=S·sinβ。根據初中數學三角形邊角關系定理,根據上述已知條件,能夠推導出原點O與目標監測點位P之間的水平距離T=S·cosβ。至此階段,根據上述所有條件,可以對α、β、L等數值進行全微分及轉換計算,最終求得P點的平面精度為:
m2=cos2β·mL2+(L/β)2·mα2 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? (1)
公式(1)中的m便是側邊中誤差。根據(1)的顯示結果可知,角度測量精度、距離測量精度是決定目標監測點點位中誤差的兩個重要原因。基于此,只有將上述兩項內容互相匹配,才能使測量精度有效提升。在此基礎上,可使用matlab軟件對測量系統的精度進行三維仿真評估,基于監測設備觀測得出并進行計算的結果,即“中誤差”,與直接觀測值進行對比時,描述的內容便是“觀測值質量”,而這個比值可稱之為相對中誤差。結合上文所述可知,相對中誤差與實際誤差(真誤差)并不是一個概念,可視之為實際真誤差的一組代表值。中誤差越小,說明測量結果的精度越高。實際監測出的結果進行計算之后,目標測量點P的平面鏡度最高值為±0.8245 mm,遠遠低于深基坑二級變形量位移監測要求中有關中誤差的允許區間±3.0 mm這一標準。該結果說明,自動化監測系統應用于深基坑監測工作時,精度高,誤差微乎其微,可保證監測結果的準確性。
1.3 評估自動監測系統應用于深基坑監測穩定性時的注意事項
評估自動監測系統應用于深基坑監測穩定性時,一般采用的方法為:將自動監測系統收集到的多組數據與人工監測收集到的多組數據分別進行平均值計算之后,加以比對,根據數據的趨勢變化情況,總結出規律,最終形成結論。這種評估方法應用范圍較為廣泛,最終結果的可參考性較強。然而,如果監測對象是深基坑,則采用上述方法進行評估時,還需注意下列事項:
其一,深基坑開挖作業一般不會選在凌晨,且凌晨的溫度處于相對穩定的狀態。因此,從理論上看,凌晨是自動監測和人工監測工作開展的好時機。但必須注意的一個問題是,專用于深層水平位移的自動化監測設備在深基坑周圍合適位置完成布置安裝之后,對應的監測點很可能無法采用常規的人工監測方法開展相應的人工測量作業。基于此,需要在埋設測斜管階段,便在自動化監測點旁邊選擇合適位置,提前設置人工監測點。
其二,自動化監測過程的連續性是人工監測不具備的優勢。因此,自動化監測數據相較于人工監測數據,呈現出的曲線更加平滑。但這并不代表自動化監測結果不會出現任何偏差。如監測期間如果發生傳感器電力不足的情況,監測結果便有可能出現異常。基于此,在分析結果時,首先應該將偏差較大的結果予以排出,圍繞其余結果進行趨勢分析及比對。
2 整體監測方案設計
整體監測方案設計方面,選擇的深基坑工程項目的一般情況為:施工所在地位于城市中心區域,周圍建筑環境相對密集,可控程度較低,如果采用人工監測方式,不僅難度較高,測量過程中發生意外的概率較大。因此,將監測設備架設在位于基坑南側的某高層建筑樓頂,在此處設置觀測站。選擇該位置的原因在于,能夠有效降低施工場地內各項設備對自動化監測系統監測視線造成的干擾。此外,在周邊臨近的3棟樓的合適位置設置3個固定的棱鏡,以此作為后視點,最后完成基準網的建設。上述準備工作全部完成后,還需沿著深基坑的邊坡頂端區域設置多個監測點(具體達到18個),整體呈現出“L”形,彼此之間的距離統一調整為15 m。
在監測工作開展期間,每一天都需要在相同時間對相同的監測點進行監測。自動監測完成后的第一時間,立刻對剛剛結束自動測量的監測點位進行人工測量。
3 自動化監測系統應用于深基坑監測工作中的實測可靠性驗證
3.1 尺度變形監測相關的可靠性分析
根據上文所述的監測方案可知,由于設備自動化監測以及人工監測之間幾乎不存在時間差,故監測點位周圍環境、深基坑內的工程進展情況幾乎不會發生明顯變化。上述情況意味著自動化監測及人工監測的對象是完全相同的,所有測量點之間均處于穩定狀態。以點帶面,深基坑邊坡頂處的所有監測點位,相鄰兩點之間的距離會維持15 m的恒定狀態。隨機選取其中的兩個點位,圍繞自動測量長度、人工測量長度進行比對分析,并計算出每次的差值。10次監測結果如表1所示。
根據表1顯示的結果可知,在隨機所選擇編號為N1和N5兩個監測點位后,共計10次基于監測設備的自動測量絕對距離長度與人工測量絕對距離長度結果相比,差值均體現在小數點后四位。該結果表面看來,在絕對距離長度方面,自動測量與人工測量之間的差值微乎其微。深層分析結果顯示:由于兩種測量方式均為“等精度觀測”,故應用邊長中誤差計算公式(下式中d為兩種測量方法獲得的絕對距離長度差值,n表示觀測次數)。
(2)
經過計算后可知,自動化監測系統在監測深基坑作業時,在數據獲得方面與人工測量方式相比,二者之間的誤差極小,均處于中位差允許范圍之內,故數據的穩定性較強,意味著在尺度變形監測相關的可靠性較高。
3.2 水平位移監測相關的可靠性分析
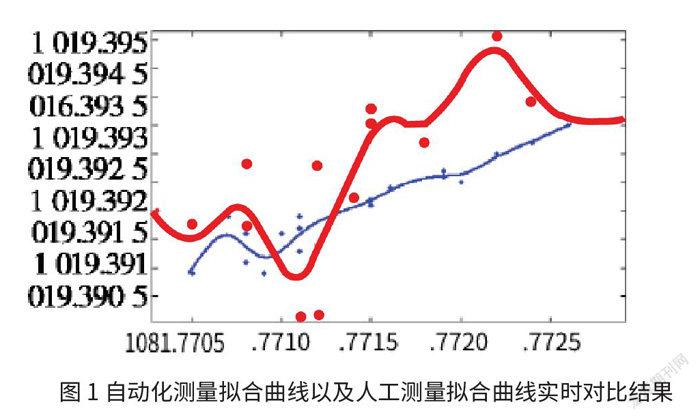
在水平位移監測方面,采用的方法為:在持續30 d時間內,每天上午9:00開始,同時采用自動化監測以及人工監測方式,完成對某個監測點位水平位移(坐標)的監測。將相關結果導入matlab軟件,就坐標監測變化情況生成對應的曲線。具體如圖1所示。其中,細曲線及點位代表基于自動化監測系統監測到的數據;粗曲線及點位代表人工監測方式獲取的數據。需要注意,一些離散程度較高的點位表明監測誤差較大,故沒有選為曲線經過區域。從圖中顯示的曲線來看,兩種方式最終呈現出的結果均表明:深基坑的側壁在水平方向朝著東北方移動。但細曲線的整體變化趨勢相對平緩,且點位分布情況的合理性更高。粗曲線及點位的分散程度較高,表明測量結果的精確程度遠遠不如細曲線。具體的數值為:自動測量結果中,相鄰觀測點位的位移量非常低,最大值并沒有超過1 mm,速率變化值在2 mm/d之下。該結果并沒有超過水平位移監測規范報警臨界值[3]。而人工測量結果顯示,監測點位水平位移差更改幅度較大,最大位移量已經達到1.5 mm(與自動監測相比,差值達到0.5 mm,這一數據表明差異極大)。總體而言,基于自動化測量系統在監測深基坑目標點位水平位移(坐標變化情況)時,所獲得的數據之間差值較小,且整體變化趨勢較為平穩,更加符合實際情況。而人工操作設備進行監測時,獲得數據具有更大的“跳脫性”,在一定時間內呈現出忽高忽低的變化情況,這并不符合實際情況。
4 結語
綜上所述,自動化監測系統應用于深基坑監測工作時,如果在排除外界干擾的情況下,相鄰兩次監測所獲得的數據差值并不大。如果深基坑存在定向位移情況,則自動化監測結果能夠如實呈現出這種位移的變化趨勢,監測結果符合客觀規律。相較而言,人工測量方式在基坑情況發生變化時,所獲得的結果跳躍性較大,表明一些監測結果的誤差較大。由此可見,自動化監測方式的可靠性更強。
參考文獻
[1] 劉輝喜,張澤輝,史豪杰.基于GIS技術的城市明挖隧道深基坑支護施工安全監測方法[J].粉煤灰綜合利用,2021,35(6):58-63.
[2] 馬濤,趙彥軍,張偉.自動化監測系統分析深基坑監測的可靠性[J].北京測繪,2019,33(11):1356-1359.
[3] 王宇,王鵬,李銘,等.自動化監測系統在深基坑監測中的可靠性分析[J].測繪與空間地理信息,2019,42(3):222-224.