散貨料堆快速點云分割和降噪算法研究
2022-07-06 13:29:00韓曉龍王為民楊志遠王貢獻
港口裝卸 2022年3期
韓曉龍 王為民 金 鑫 楊志遠 王貢獻
1 青島港口裝備制造有限公司 2 武漢理工大學交通與物流工程學院
1 引言
自經濟全球化以來,我國進出口貿易日益繁榮,散裝貨物的運輸量也逐年遞增,加強散貨碼頭堆取料作業自動化建設,提高散貨碼頭運輸效率迫在眉睫。三維重構技術可獲取料堆表面位置信息,以位置信息作為自動控制指令依據是實現散貨堆場自動化的關鍵。散貨料堆的三維重構通常是通過傳感設備采集料堆表面點云,然后對點云進行三維建模來實現,但在點云采集中會由于設備、工作環境等因素引入一些噪聲點和地面干擾點云,因此需要對散貨料堆點云進行降噪和分割地面處理。
目前針對點云分割和降噪的研究有很多,其中點云分割方法可分為基于邊緣分割[1-2]、基于特征聚類分割[3-4]和基于隨機采樣一致性(RANSAC)分割[5-7]。Woo等用法向量偏差細分網格作為特征描述,提取物體邊緣相鄰點[1]。莫堃等通過構造符號距離函數估算點云的平均曲率值,實現點云模型快速分割[2]。Yamauchi等采用均值平移法對網格法線進行聚類分割[3]。吳燕雄等在歐式聚類算法基礎上增加平滑度約束,加快了算法分割速度[4]。RANSAC(Random Sample Consensus)算法于1981年由Fischler和Bolles提出[5]。Awwad等基于隨機采樣一致性算法提出Seq-NV-RANSAC分割算法,解決隨機采樣一致性算法可能檢測到虛假平面的問題[6]。劉闖等用法向量夾角為約束條件對點云進行分類,再結合RANSAC分割算法完成點云的分割[7]。
在點云降噪研究方面,Zhang等通過對空間域和特征域的權值調整控制點云的平滑程度和特征保持程度,具有較好的降噪效果,但是不能很好地去除離散點[8]。肖國新等在雙邊濾波基礎上提出自適應空間方差和灰度方差參數的濾波算法,保留了更多的邊緣特征[9]。Taubin等首次將Laplacian算法應用到網格處理中[10]。Lange等在前者的基礎上提出各向異性幾何平均曲率流降噪方法[11]。孫正林等改進Mean Shift算法,提高移動到核密度估計函數的最大值點的速度[12]。Alexa等運用移動最小二乘法(Moving Least Squares,MLS)擬合曲面,光滑點云[13]。Jia等針對目前市場流行的RGB-D相機,提出一種將彩色圖像與深度圖像對齊去除離散噪聲點的方法[14]。
2 散貨料堆地面分割和降噪算法
算法框架見圖1。首先利用下采樣算法精簡散貨料堆點云數目,加快點云后續處理速度;再結合基于采樣一致性(RANSAC)分割算法與歐式聚類分割算法彌補了前者分割不徹底、后者速度慢的問題;最后結合統計分析法和移動最小二乘法去除離散點和點云表面細小噪聲點。
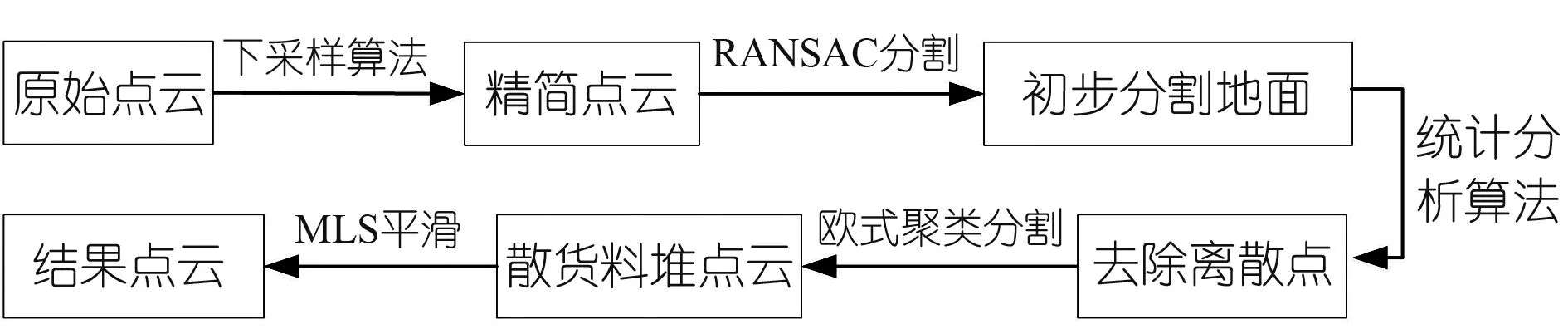
圖1 散貨料堆提取與濾波算法過程
2.1 地面分割
下采樣算法原理如下:首先對整幅點云進行柵格劃分,劃分后的每個小立方體稱為體素,將體素中所有的點由重心點代替,刪除其他點完成點云精簡。
隨機采樣一致性算法(RANSAC)將點云看作一個樣本集合,并設定一個判斷準則,根據判斷準則將整個點集合分為局內點(inliers)和局外點(outliers)。其分割地面的具體步驟如下:
(1)從樣本集合中隨機選取1個子集,把子集中的點設為局內點。
(2)使用估計算法計算此局內點的模型參數,然后計算其他子集與這個數學模型的偏差。三維空間中的地面模型可由式(1)表示:
axw+byw+czw+d=0
(1)
偏差用點q(xw,yw,zw)到平面的歐式距離D表示。根據實際需求設定1個偏差閾值σ,當偏差D小于閾值σ時,將該樣本點歸于局內點,否則歸于局外點。
(3)記錄當前局內點的個數,如果個數足夠多就認為模型足夠合理;把當前局內點作為初始選取的子集,重復上述步驟不斷擴充模型。
(4)最后,通過估計局內點個數與模型的錯誤率來評估模型。整個過程記作一次迭代,每次迭代都選擇更優的模型。算法迭代次數k可以根據式(2)計算獲得:
1-p=(1-wn)k
(2)
對式(2)兩邊取對數,得
(3)
式中,p為算法產生有用結果的概率,取值0.99;w為每次從數據集中選取1個局內點的概率,取0.5;n為估計模型需要的最小數據量,平面需要至少3個點確定,假設這n個點的選取是相互獨立的,選中的點可能被后續迭代重新選擇,這樣求得的k值一定是迭代次數的上限值。
由于料堆地面不平整,RANSAC分割算法會將料堆和地面分割成多個分離的點云塊,結合歐式聚類算法可完成散貨料堆點云提取,歐式聚類算法的過程如下:
(1)確定某一采樣點qi,創建一個空集Q*,設定閾值t。
(2)用k-d樹算法搜索qi最近鄰的k個點,計算這k個點到qi的距離,將采樣點qi和距離小于t的點qi1,qi2,qi3…放在Q*中。
(3)在Q*/qi(集合Q*中除qi點外的其他點)里找到qi1,重復操作(2)。
(4)在Q*/qi,qi1中找一點,重復操作(2)。
(5)當Q*中不在加入新的點時,完成一次聚類搜索。
2.2 點云降噪
采用近鄰統計分析法去除離散點,算法的步驟如下:
(1)利用k-d樹法搜索集合Q中每一個點qi的k鄰域。

(4)
(5)

濾除離散點后的點云還存在細微的噪聲點,通過曲面擬合可以將這些噪聲點濾除。曲面擬合常用的方法有多項式擬合和分段擬合,多項式擬合需要較高次數才能達到較好效果,計算復雜;分段擬合影響擬合的光滑性。為了解決這2種方法的不足,運用移動最小二乘法(Moving Least Square,MLS)引入緊支撐權函數和基函數。緊支撐權函數決定擬合曲線、曲面的光滑度,基函數決定擬合曲線、曲面的誤差大小。
在待擬合的區域里,擬合函數φ(x)表示為
(6)
式中,η(x)=[η1(x),η2(x),…,ηm(x)]T稱為基函數,它是n次完全多項式,m是基函數的項數;a(x)=[a1(x),a2(x),…,am(x)]T為待求的系數,它是坐標x的函數。點云的線性基和二次基分別為:
線性基:η(x)=[1,x,y]T,m=3。
二次基:η(x)=[1,x,y,x2,xy,y2]T,m=6。

(7)
式中,J是選定節點鄰域點數目;φ(x)是擬合函數;f(xI)是x=xI處的節點值,w(x-xI)是節點xI的權函數。為確定系數a(x),計算式(7)的極小值,并對a求導得
(8)
其中
(9)
Q(x)=[w(x-x1)η(x1),w(x-x2)η(x2),
…,w(x-xk)η(xk)]
(10)
f=[f(x1),f(x2),…,f(xk)]T
(11)
令(8)式為0,得
a(x)=P-1(x)Q(x)f
(12)
將式(12)代入(6),就可以得到MLS擬合函數
φ(x)=ηT(x)P-1(x)Q(x)f
(13)
緊支撐權函數是移動最小二乘法的核心,權函數只影響支撐域內的數據,因此,權值在支撐域內大于零,并且隨‖x-xI‖的增大而減小,在支撐域邊界和外界處等于零。另外,權函數應該光滑連續,這樣可以使得繼承權函數特性的擬合函數也光滑連續。常用的權函數是多次樣條函數,如式(14)所示。
(14)

3 實驗結果與分
用白色塑料顆粒模擬散貨,用Kinect深度相機采集點云,獲取的料堆點云見圖2。體素柵格下采樣精簡算法耗時1.64s,精簡后點的數目為32 672(精簡前為216 237),精簡程度為84.9%,結果見圖3。

圖2 散貨料堆初始點云圖 圖3 精簡后點云圖
RANSAC算法分割地面后的效果見圖4。平面偏離閾值σ影響局內點的選取,當σ值過小時,大量地面點被錯誤當作外點,地面和散貨料堆分離模糊,(見圖4a);當σ值過大時,部分料堆點被錯誤當作局內點,散貨料堆被過度分割,(見圖4c)所示。根據實驗結果,σ取0.008 m到0.012 m之間的值的效果較好,為保證精度σ值取0.008,分割結果(見圖4b)。
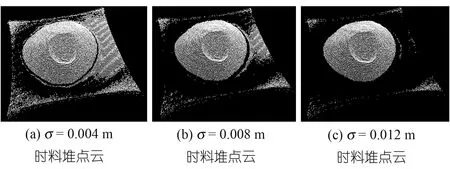
圖4 不同分割閾值下的分割效果
去除地面點云后的點云中仍然存在大量的離散點,采用鄰域統計分析法去除離散點云。取標準差倍數ξ為1,鄰域k越大,算法的魯棒性越好,但是算法使用的時間也越長。為了針對散貨料堆選擇合適的k值,設計了k=2,4…24共12組實驗,得出算法計算時間T和濾除點數目M與k的對應關系(見圖5)。從圖5中可以看出k值為8時,濾波時間和濾除點數目綜合效果最佳,因此,鄰域大小取為8。
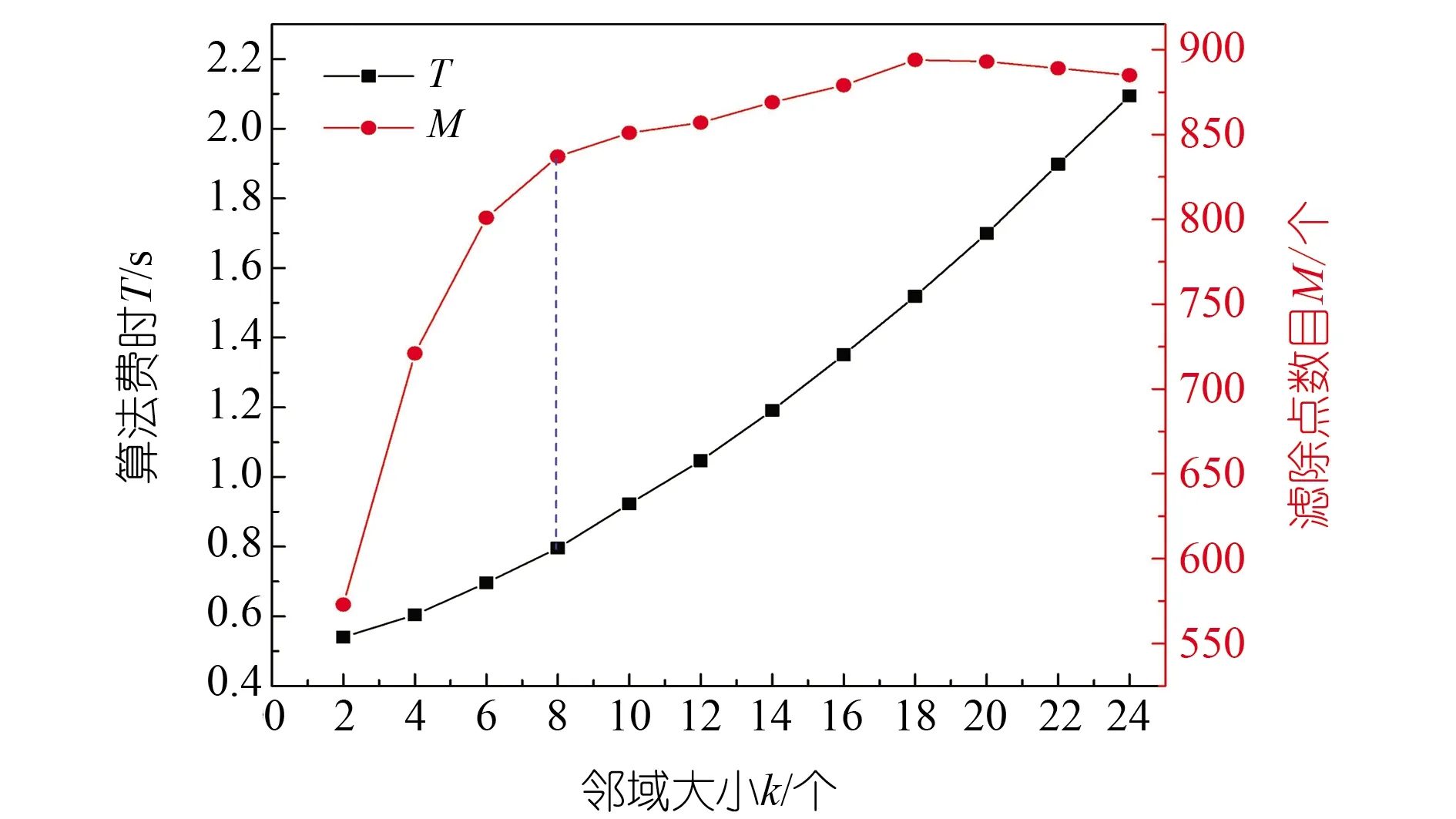
圖5 算法用時、濾除效果與鄰域大小關系圖
離散點去除后,點云大致分為4個集群(見圖6a),用歐式聚類將4個集群劃分出來,再提取點數最多(13109個點)的散貨料堆點云(見圖6b)。
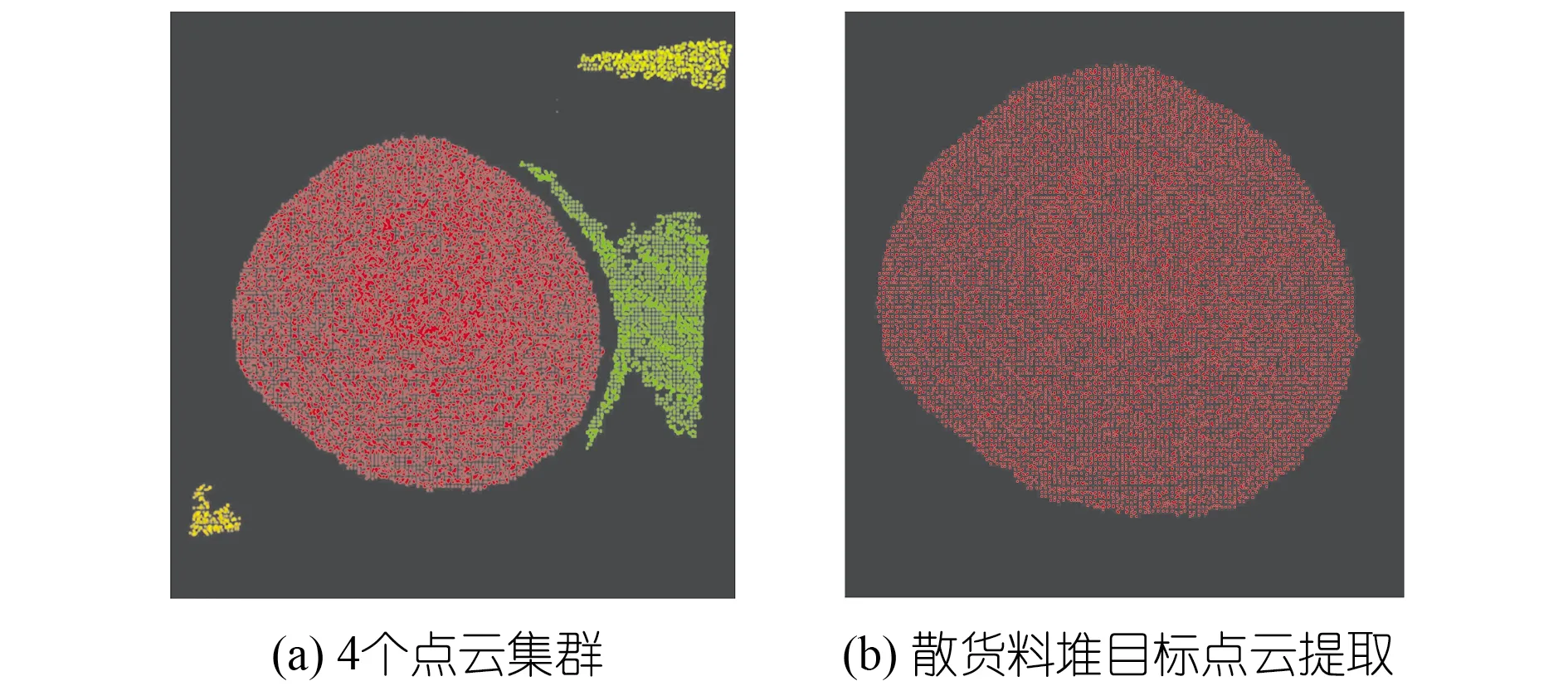
圖6 歐式聚類分割示意圖
采用MLS光滑點云,用k-d樹搜索法加速鄰域搜索,取二次基函數η(x)=[1,x,y,x2,xy,y2]T。根據實驗結果,支撐域半徑r值取0.012 m以上平滑效果達到最好,但是隨著r值增大,算法處理時間增大,因此,取r=0.012 m為本算法研究參數,最終實驗結果見圖7。
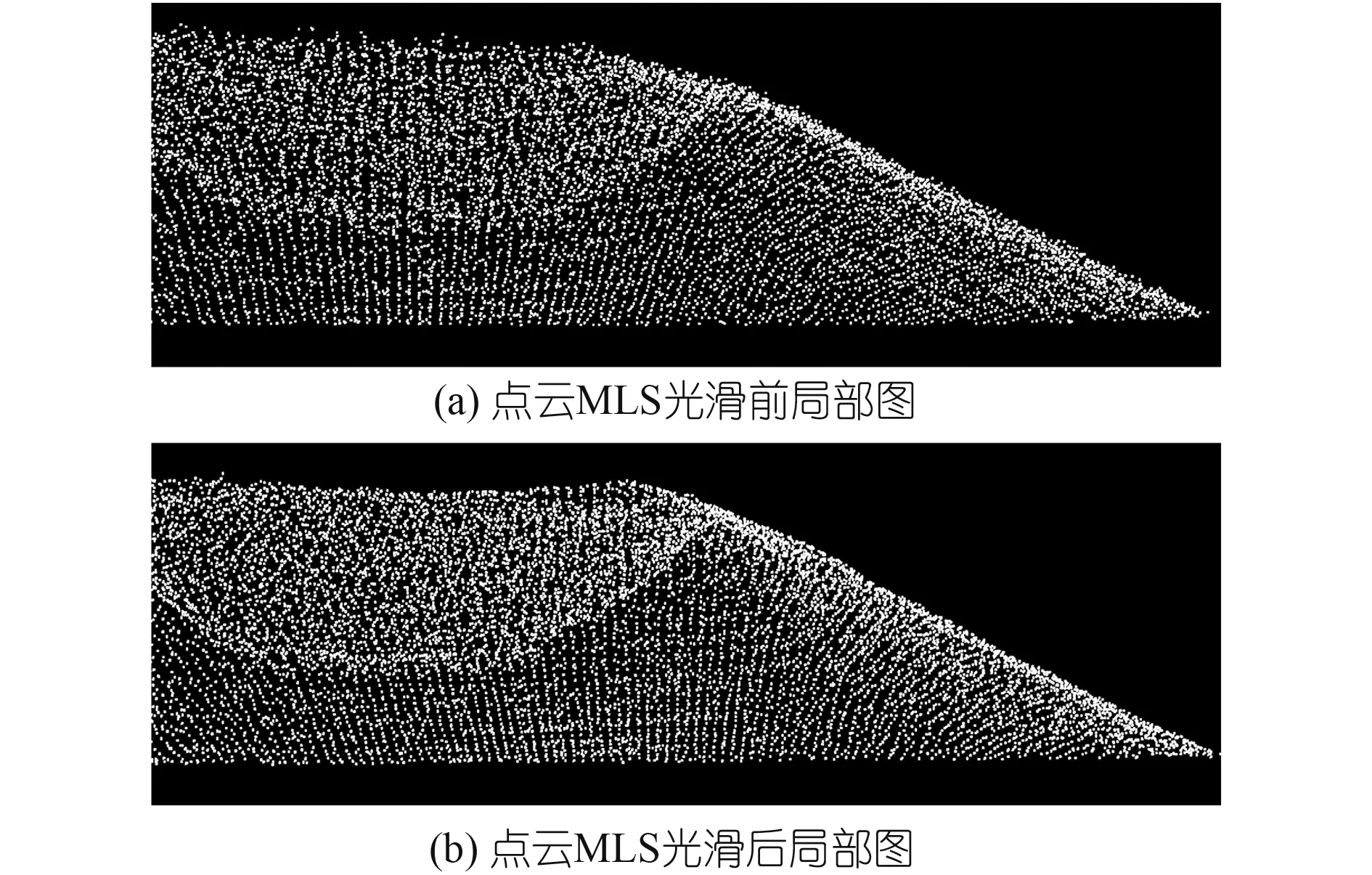
圖7 點云MLS光滑處理效果對比圖
4 結語
提出一種應用在散貨料堆點云的高效率預處理算法框架,該算法主要完成散貨料堆的地面分割和降噪。在經典RANSAC分割算法前增加點云精簡處理,提高地面分割速度,并通過歐式聚類分割算法解決RANSAC分割算法分割不徹底問題。結合統計分析法和移動最小二乘法去除離散點和點云表面細小噪聲點,并在歐式聚類前完成離散點去除,提高料堆點云分割提取的穩定性。
