港口起重機(jī)系統(tǒng)起升部分的編程與設(shè)計(jì)
2022-07-06 13:29:12韋俊
港口裝卸 2022年3期
關(guān)鍵詞:變頻器
韋 俊
北部灣港欽州碼頭有限公司
1 引言
目前,港口起重設(shè)備自動(dòng)化程度越來(lái)越高,可編程序控制器PLC結(jié)合變頻器在港機(jī)上大量應(yīng)用,使得港口起重機(jī)的裝卸效率大大提高。港口起重機(jī)作為港口貨物轉(zhuǎn)移的重要機(jī)械,極大減輕了工人的勞動(dòng)強(qiáng)度,但是設(shè)備自身存在的安全隱患對(duì)工人的人身安全傷害也不容忽視。起重機(jī)不僅包括其結(jié)構(gòu)上的設(shè)計(jì)安全,其系統(tǒng)軟件的設(shè)計(jì)對(duì)整機(jī)的安全同樣至關(guān)重要。
在對(duì)起升機(jī)構(gòu)的軟件進(jìn)行設(shè)計(jì)時(shí),其重難點(diǎn)在于抓斗工況。在該工況下,起升機(jī)構(gòu)采用兩套機(jī)構(gòu),即開(kāi)閉機(jī)構(gòu)和支持機(jī)構(gòu),相互配合,實(shí)現(xiàn)對(duì)抓斗開(kāi)合和升降的控制[1]。以下重點(diǎn)探討在抓斗工況下港口起重機(jī)起升部分的軟件編程。
2 起升機(jī)構(gòu)零位條件保護(hù)
起升主令處于0檔位時(shí),啟動(dòng)設(shè)備,各機(jī)構(gòu)變頻器上電,并通過(guò)程序能有效自鎖起升零位條件,PLC方能掃描起升的控制程序,并運(yùn)行變頻器使機(jī)構(gòu)的動(dòng)作。起升主令不處于0檔位時(shí),啟動(dòng)設(shè)備,則PLC拒絕掃描起升控制程序,從而在軟件上實(shí)現(xiàn)對(duì)機(jī)構(gòu)的保護(hù)(見(jiàn)圖1)。圖1程序段23中,當(dāng)起升處于0擋位時(shí),常開(kāi)點(diǎn)H_in[30]通,同時(shí)支持零位、開(kāi)閉零位得電,使得線圈H_tp[22]得電并自鎖,其在程序段24中的常閉點(diǎn)斷,系統(tǒng)將對(duì)程序段24以上的程序進(jìn)行掃描,程序段25中的支持上升命令將發(fā)給變頻器。如果手柄不處于0擋位,則程序段24中的常閉點(diǎn)H_tp[22]通,那么系統(tǒng)將掃描至程序段24結(jié)束。該程序可避免手柄處于0擋位之外啟動(dòng)設(shè)備,設(shè)備直接運(yùn)行的情況,起到零位保護(hù)的目的。

圖1 起升零位條件保護(hù)
3 手動(dòng)抓斗工況
手動(dòng)抓斗工況指手動(dòng)操作抓斗進(jìn)行貨物抓取時(shí),抓斗的開(kāi)合大小由司機(jī)決定。
3.1 抓斗工作流程
開(kāi)閉電機(jī)正向運(yùn)行,其鋼絲繩上升,支持電機(jī)根據(jù)實(shí)際情況,正向或反向運(yùn)行,抓斗實(shí)現(xiàn)合斗。合斗完成后,由閉斗階段轉(zhuǎn)慢速上升階段,并在慢速階段進(jìn)行鋼絲繩受力平衡調(diào)整即速度調(diào)整,完成鋼絲繩受力平衡后立即進(jìn)入高速運(yùn)行階段[2]。
在慢速運(yùn)行階段,系統(tǒng)對(duì)開(kāi)閉電機(jī)降速,最終達(dá)到鋼絲繩受力相對(duì)平衡,此過(guò)程稱(chēng)為追繩階段。
在高速運(yùn)行階段,系統(tǒng)持續(xù)檢測(cè)支持電機(jī)、開(kāi)閉電機(jī)的電流,實(shí)時(shí)計(jì)算電流差是否超出所設(shè)置的范圍,若超出,表明某機(jī)構(gòu)受力過(guò)大,系統(tǒng)會(huì)及時(shí)對(duì)受力過(guò)大的機(jī)構(gòu)進(jìn)行速度調(diào)整,確保不會(huì)出現(xiàn)再次開(kāi)斗或者支持繩松弛的情況。
3.2 支持電機(jī)的控制
手動(dòng)抓斗工況下存在以下特點(diǎn)。
(1)制動(dòng)器閉鎖時(shí),抓斗下沉的距離有限,抓斗無(wú)法有效地進(jìn)行深挖作業(yè),出現(xiàn)抓不到貨物的情況。
(2)制動(dòng)器打開(kāi),支持電機(jī)處于自由狀態(tài),抓斗可實(shí)現(xiàn)深挖,但在抓斗閉斗結(jié)束的瞬間,支持繩可能過(guò)于松弛,后期操作可能會(huì)導(dǎo)致鋼絲繩相互纏繞,嚴(yán)重的導(dǎo)致鋼絲繩繃出滑輪的事故。
(3)制動(dòng)器打開(kāi),支持電機(jī)處于上升運(yùn)行狀態(tài),抓斗無(wú)法實(shí)現(xiàn)深挖作業(yè),導(dǎo)致抓斗無(wú)法抓到貨物。
(4)制動(dòng)器打開(kāi),支持電機(jī)處于下降運(yùn)行狀態(tài),可實(shí)現(xiàn)深挖,但容易發(fā)生鋼絲繩相互纏繞的問(wèn)題。
為解決以上問(wèn)題,在抓取貨物的過(guò)程中,支持電機(jī)的控制方式由速度控制切換為轉(zhuǎn)矩控制,同時(shí)對(duì)其進(jìn)行速度限制(見(jiàn)圖2)。通過(guò)轉(zhuǎn)矩模式的切換,實(shí)現(xiàn)對(duì)電機(jī)扭矩的控制,給電機(jī)施加的扭矩只能克服鋼絲繩的重力上升,但無(wú)法拉動(dòng)抓斗上升,從而保證抓斗抓取貨物的過(guò)程中,支持鋼絲繩不會(huì)出現(xiàn)過(guò)度松弛的現(xiàn)象,避免鋼絲繩相互纏繞的問(wèn)題,同時(shí)可避免追繩時(shí)間過(guò)長(zhǎng)影響效率的問(wèn)題。

圖2 支持機(jī)力矩切換程序段
圖2程序段2中的常開(kāi)點(diǎn)H_tp[06]抓斗閉斗指令通,進(jìn)行閉斗操作,力矩切換線圈CW1_H1[08]得電,將變頻器由速度控制切換為轉(zhuǎn)矩控制,同時(shí),變頻器通過(guò)力矩參考R02500得到力矩大小為60,實(shí)現(xiàn)對(duì)支持機(jī)的力矩給定及控制。
3.3 追繩過(guò)程中的鋼絲繩力矩平衡
理論上的力矩完全平衡,會(huì)必然出現(xiàn)抓斗開(kāi)斗的情況。因此在追繩過(guò)程中,開(kāi)閉電機(jī)電流需略大于支持電機(jī)電流,而非相等,才能保持支持鋼絲繩受力略小于開(kāi)閉鋼絲繩,并維持這個(gè)狀態(tài)提升貨物,從而避免抓斗再次開(kāi)斗的問(wèn)題。因此整個(gè)提升過(guò)程中,必須對(duì)支持機(jī)構(gòu)和開(kāi)閉機(jī)構(gòu)的電流進(jìn)行實(shí)時(shí)監(jiān)測(cè),實(shí)時(shí)進(jìn)行速度的調(diào)整。
3.4 平衡過(guò)程中的抗干擾問(wèn)題
由于抓斗提升貨物過(guò)程中,可能出現(xiàn)雙機(jī)速度的變化不同步,導(dǎo)致支持機(jī)或者開(kāi)閉機(jī)其中某一機(jī)構(gòu)受力過(guò)大,造成力矩差出現(xiàn)波動(dòng),波動(dòng)在允許的范圍時(shí),并未造成抓斗開(kāi)斗或合斗,不需要對(duì)雙機(jī)速度進(jìn)行調(diào)整。力矩平衡過(guò)程中的干擾來(lái)源于起升機(jī)構(gòu)中的電機(jī)速度變化,主要原因有:
(1)制動(dòng)器剎車(chē)片調(diào)整過(guò)緊,制動(dòng)盤(pán)與剎車(chē)片存在摩擦,在一定程度上會(huì)影響機(jī)構(gòu)的速度降低,引起力矩不平衡,導(dǎo)致系統(tǒng)反復(fù)對(duì)速度進(jìn)行調(diào)整。
(2)司機(jī)操作原因。抓斗抓取貨物提升過(guò)程中的同時(shí),司機(jī)操作回轉(zhuǎn)、變幅機(jī)構(gòu)同時(shí)運(yùn)行,由于慣性,會(huì)引發(fā)了電機(jī)電流的變化導(dǎo)致力矩不再平衡,系統(tǒng)反復(fù)對(duì)速度進(jìn)行調(diào)整,影響裝卸效率為解決干擾問(wèn)題,系統(tǒng)在允許的范圍內(nèi),適當(dāng)選擇抗干擾的區(qū)間[3]。通過(guò)力矩平衡抗干擾區(qū)間程序段(見(jiàn)圖3),可以得出:當(dāng)力矩差大于300 Nm時(shí),M00902線圈得電,雙機(jī)受力不平衡,系統(tǒng)開(kāi)始調(diào)用追繩程序開(kāi)始平衡鋼絲繩受力。當(dāng)力矩差小于300 Nm后,M00902線圈失電,其常閉觸點(diǎn)在程序段8中接通。隨著鋼絲繩繼續(xù)平衡,力矩差小于100 Nm,程序段7中的M00900線圈得電,其常開(kāi)點(diǎn)M00900在段8中接通,使得M00901線圈得電,達(dá)到雙機(jī)力矩平衡。根據(jù)程序可得出,可以得到當(dāng)100 Nm<力矩差<300 Nm時(shí),系統(tǒng)不調(diào)用追繩程序?qū)﹄p機(jī)速度作調(diào)整,保持高速提升,可避免調(diào)整過(guò)于頻繁造成貨物提升過(guò)程的不穩(wěn)定,提高貨物的裝卸效率。該平衡自鎖狀態(tài),直至在隨后的開(kāi)斗中或力矩差大于300 Nm之后被解除。
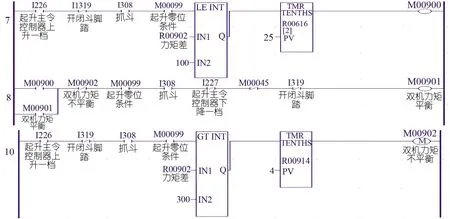
圖3 力矩平衡抗干擾區(qū)間程序段
4 自動(dòng)抓斗工況
4.1 自動(dòng)抓斗
自動(dòng)控制抓斗的其核心是支持機(jī)構(gòu)、開(kāi)閉機(jī)構(gòu)引入增量型編碼器,并通過(guò)反饋的編碼器脈沖,實(shí)時(shí)檢測(cè)支持機(jī)構(gòu)和開(kāi)閉機(jī)構(gòu)的位置,以及閉斗狀態(tài)時(shí)的位置差,即繩差。
通過(guò)標(biāo)志位的控制實(shí)現(xiàn)抓斗開(kāi)合程度以及開(kāi)合速度在一定范圍內(nèi)由系統(tǒng)軟件控制,抓斗閉合到所設(shè)定位置之后,即使司機(jī)依然操作機(jī)械處于閉斗狀態(tài),系統(tǒng)自動(dòng)忽略司機(jī)的操作,隨后自動(dòng)完成提升及追繩過(guò)程從而進(jìn)入高速運(yùn)行狀態(tài)(見(jiàn)圖4)。

圖4 系統(tǒng)內(nèi)部強(qiáng)制減速程序段
自動(dòng)抓斗工況作業(yè)時(shí),POSE—R02416代表抓斗的姿態(tài),當(dāng)R02416>100時(shí),意味著抓斗合斗結(jié)束,閉斗終點(diǎn)m03330線圈得電,其常開(kāi)點(diǎn)接通,將0速直接送入R02000起升手柄速度,強(qiáng)制起升停止運(yùn)行,即使此時(shí)司機(jī)依然操作設(shè)備進(jìn)行閉斗,但是系統(tǒng)自動(dòng)給0速停止閉斗操作。自動(dòng)抓斗可在艙深、司機(jī)看不到抓斗的情況下,能夠高效率的抓取貨物,有效減少追繩的時(shí)間。
4.2 支持電機(jī)的控制
支持電機(jī)的控制狀態(tài)由閉斗前的速度控制模式切換為轉(zhuǎn)矩控制模式,轉(zhuǎn)矩給定的大小隨著繩差趨近標(biāo)尺而逐步變大。通過(guò)抓斗姿勢(shì)與實(shí)際繩差建立關(guān)系,繩差改變的同時(shí)能夠改變轉(zhuǎn)矩,目的是在抓斗閉斗結(jié)束的瞬間,確保支持繩處于收緊的狀態(tài),減少支持機(jī)追繩平衡的時(shí)間。
4.3 自動(dòng)抓斗中的補(bǔ)償速度
在自動(dòng)抓斗中,補(bǔ)償速度大小隨著繩差趨近標(biāo)尺而逐步遞減,理想狀態(tài)下,補(bǔ)償速度為0,雙機(jī)不存在速度調(diào)整,鋼絲繩平衡不存在追繩階段。以閉斗為基準(zhǔn),得出繩差相對(duì)閉斗位置的基準(zhǔn)偏差,當(dāng)抓斗合斗的姿勢(shì)越趨近閉斗終點(diǎn)時(shí),基準(zhǔn)偏差越小,速度補(bǔ)償越小,速度調(diào)整的幅度越小,抓斗實(shí)現(xiàn)力矩的微調(diào)(見(jiàn)圖5)。

圖5 自動(dòng)抓斗速度補(bǔ)償與抓斗姿勢(shì)之間關(guān)系
5 提升溜鉤問(wèn)題
正常情況下PLC得到主令手柄的信號(hào)后,立即向變頻器和制動(dòng)系統(tǒng)發(fā)送動(dòng)作指令,變頻器輸出力矩,同時(shí)剎車(chē)打開(kāi)。但是此控制方式中的變頻器和制動(dòng)器之間沒(méi)有聯(lián)鎖關(guān)系,當(dāng)PLC的指令剛剛發(fā)送給變頻器時(shí),制動(dòng)器打開(kāi),如果此時(shí)信號(hào)受到外界的干擾較大,但變頻器并沒(méi)有輸出力矩,就會(huì)發(fā)生“溜鉤”現(xiàn)象,引發(fā)安全事故。
為避免溜鉤現(xiàn)象,可改變控制方式,讓變頻器和制動(dòng)系統(tǒng)之間產(chǎn)生連鎖關(guān)系,在剎車(chē)回路串入變頻器運(yùn)行信號(hào),加裝24 V中間繼電器來(lái)檢測(cè)變頻器的運(yùn)行信號(hào),只有在變頻器運(yùn)行后制動(dòng)器才能打開(kāi)。同時(shí)對(duì)變頻器的電流進(jìn)行檢測(cè),當(dāng)變頻器電流達(dá)到一定值時(shí),即變頻器的輸出力矩達(dá)到100%時(shí),允許制動(dòng)器打開(kāi)(見(jiàn)圖6)。

圖6 變頻器于制動(dòng)器連鎖程序段
圖6程序中,當(dāng)起升支持機(jī)構(gòu)的升降被啟動(dòng)即m00138通,如支持電流大于1 100 A,力矩檢測(cè)達(dá)標(biāo),確保支持機(jī)構(gòu)不被貨物反拉。在程序段26中m00609支持制動(dòng)器打開(kāi),即變頻器運(yùn)行2個(gè)條件同時(shí)滿足后,才能允許q00010線圈得電,打開(kāi)制動(dòng)器。可確保變頻器運(yùn)行,力矩達(dá)標(biāo)之后,制動(dòng)器再打開(kāi),不發(fā)生溜鉤的現(xiàn)象。
6 結(jié)語(yǔ)
港口起重設(shè)備在安全管理中還存在諸多問(wèn)題,需要不斷更新技術(shù)水平,提高對(duì)于設(shè)備設(shè)計(jì)的安全的要求。在抓斗工況下,對(duì)港口起重機(jī)起升部分的軟件編程進(jìn)行了介紹,可為同類(lèi)型設(shè)備的控制程序及安全保護(hù)程序設(shè)計(jì)提供參考。
猜你喜歡
消費(fèi)電子(2022年6期)2022-08-25 09:47:16
鍛壓裝備與制造技術(shù)(2021年3期)2021-08-13 08:39:56
防爆電機(jī)(2020年3期)2020-11-06 09:07:42
活力(2019年22期)2019-03-16 12:47:40
測(cè)控技術(shù)(2018年5期)2018-12-09 09:04:50
四川冶金(2017年6期)2017-09-21 00:52:30
電子制作(2017年7期)2017-06-05 09:36:13
電子測(cè)試(2017年23期)2017-04-04 05:07:32
自動(dòng)化博覽(2014年12期)2014-02-28 22:34:39
自動(dòng)化博覽(2014年10期)2014-02-28 22:33:52
